基于可控伸縮輪的移動機器人研究
2022-02-19 10:12:26徐曉康張國偉盧秋紅王博疏雅麗
機械工程師 2022年2期
關鍵詞:移動機器人
徐曉康,張國偉,,盧秋紅,王博,疏雅麗
(1.上海電力大學自動化學院,上海 200082;2.上海合時智能科技有限公司,上海 201100)
0 引言
近年來,國內外對爬樓梯移動機器人的研究和使用越來越廣泛,出現了各式各樣的爬樓梯移動機器人,其可以代替人類完成貨物搬運等任務。對于爬樓梯移動機器人而言,樓梯攀爬的機構尤為重要。大多數的爬樓梯移動機器人按實現爬樓梯功能的原理主要分為輪式、腿式、履帶式、變形式、復合式(如輪腿式、關節履帶式、輪履式)等。輪式爬樓梯移動機器人具有結構簡單、效率高、質量輕和易于控制的優點[1-3],但其環境適應性較差,很難適應樓梯這類特殊的結構化環境。腿式爬樓梯移動機器人具有較強的環境適應能力,可通過調整腿部姿態來適應崎嶇不平的地形[4-7],但這種機器人結構復雜、移動速度慢、效率低,難以實現穩定步態規劃和穩定平衡的控制。履帶式爬樓梯移動機器人具有良好的爬樓梯性能和一定的越障能力[8-10],但其靈活機動性較差,自身質量較大,爬越樓梯的速度較慢。變形式爬樓梯移動機器人具有很好擴展性,地形適應能力一般,機動性較好,但是其只適合一般簡單情況,對于復雜情況就不太適用了。復合式爬樓梯移動機器人具有很強的地形適應能力和較好的機動性[11-16],但其結構和控制系統一般較復雜,需要進行復雜的軌跡規劃和步態規劃等。
由于人們對機器人的要求越來越高,單一方式的攀爬結構不能很好地滿足復雜的情況,因此現在國內外對于攀爬結構的研究大多數是通過復合式和其他新的方式。意大利TGR scoiattolo 2000[17]與中國礦業大學戴本圣[18]采用多功能行星輪式結構,蘇和平[19]采用的雙聯行星輪電動爬樓梯,周秋雨[20]采用全向移動爬樓梯機構,劉增寶[21]采用輪腿復合式機構,長春工業大學李爽、王占禮[22-23]采用雙曲柄爬升機構,陳偉榮等[24]均采用不同的結構設計來實現爬樓梯功能。本文中的爬樓梯移動機器人,采用可控伸縮輪作為樓梯攀爬機構,可控伸縮輪是將輪腿式、變形式進行結合實現的。
1 可控伸縮輪
對于爬樓梯機器人而言,爬樓梯的機械結構最為重要,因此有必要研究一些新奇的樓梯攀爬結構。由于輪式的爬樓梯移動機器人具有結構簡單、效率高、質量輕和易于控制的優點,但其環境適應性較差,很難適應樓梯這類特殊的結構化環境,所以我們針對輪式進行了研究。在研究過程中發現輪腿式結構較好地改進了上述不足,但是不易控制而且不夠精密,于是我們嘗試去掉了腿式的姿態調整,將姿態調整變成了徑向伸縮,即將其變成了可變形的方式,這樣我們就可以通過控制電動機將腿式的姿態調整,變成可伸縮的徑向移動,車輪直徑的大小得以控制。
我們可以通過控制車輪直徑的大小跨越不同的障礙,這樣的可控功能是為了以后爬樓梯移動機器人智能化時可以更加精密地控制其跨越障礙,從而實現最優越障方式,這些都是未來的展望,當下首先是設計出一個可控的伸縮輪。
可控伸縮輪(如圖1、圖2)分為主動軸、輪轂、輪腿、伸縮控制盤、減速電動機、導電滑環軸、連接軸和連接桿。可控伸縮輪的基本原理:減速電動機驅動伸縮控制盤旋轉,將旋轉產生的力傳遞給與伸縮控制盤連接的連接桿,連接桿再將力傳遞給輪腿,輪腿受到輪轂孔壁的限制,使得輪腿沿著輪轂孔上下滑動,然后將輪腿與伸縮控制盤交替連接(如圖1),即可實現輪腿的交替伸縮。

圖1 可控伸縮輪
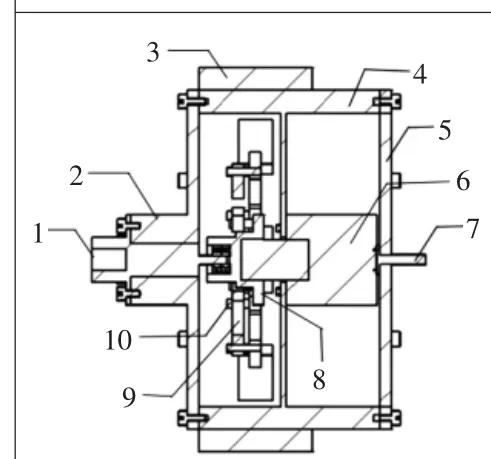
圖2 可控伸縮輪剖面圖
1.1 主動軸
如圖3所示,主動軸由連接孔、軸身、鍵槽和軸肩組成,連接孔用于與行駛電動機連接;鍵槽用于將動力傳遞給輪轂;軸身末端與伸縮控制盤連接,支撐伸縮控制盤;軸肩用于定位和連接,通過螺釘與輪轂連接。
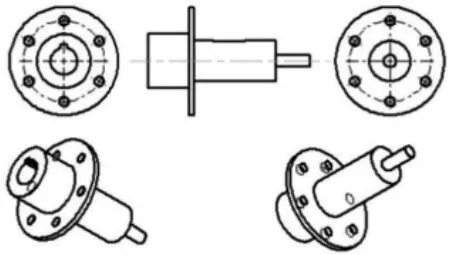
圖3 主動軸
1.2 輪轂
如圖4~圖6所示,輪轂由3部分組成,輪轂1和輪轂3通過螺釘分別與輪轂2連接,主動軸固定在輪轂1上的鍵槽處,導電滑環軸固定在輪轂3上,減速電動機固定在輪轂2上,輪腿插入輪轂2外緣上的孔中。

圖4 輪轂1

圖5 輪轂2

圖6 輪轂3
1.3 伸縮控制盤
如圖7所示,伸縮控制盤通過兩邊的孔分別與主動軸和減速電動機軸連接,為了避免減速電動機驅動帶動主動軸轉動,與主動軸的連接中加入了軸承,輪腿通過連接軸和連接桿與伸縮控制盤連接。
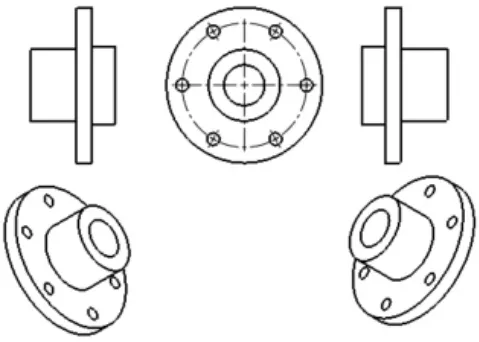
圖7 伸縮控制盤
1.4 其余部件
輪腿、導電滑環軸、連接桿、連接軸、減速電動機分別如圖8~圖12所示。
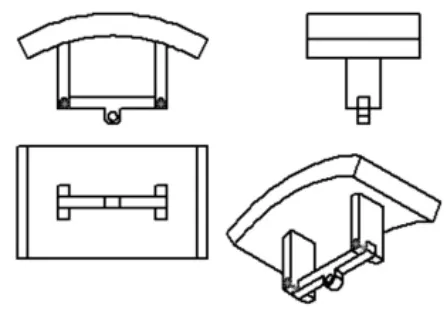
圖8 輪腿
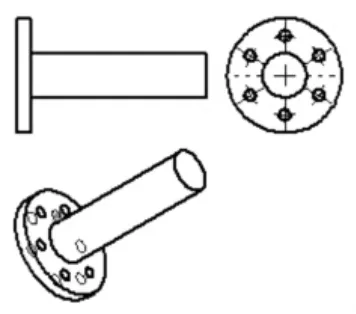
圖9 導電滑環軸

圖10 連接桿
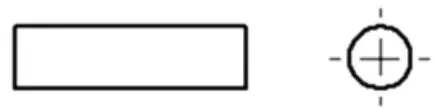
圖11 連接軸
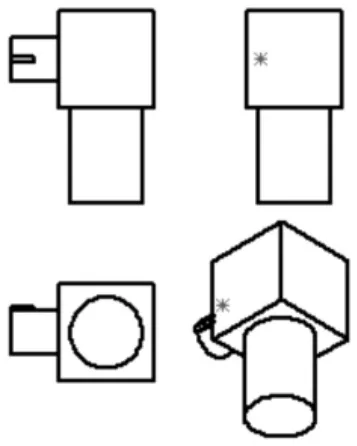
圖12 減速電動機
1.5 可控伸縮輪的伸縮
如圖13所示,將輪腿與伸縮控制盤交替前后連接,這樣可以將6個輪腿分成2組,當伸縮控制盤旋轉時(如圖14),一組輪腿往外伸長,一組輪腿向內收縮,可以增大輪腿之間的間隙,從而使得移動機器人更容易攀爬樓梯,再通過連續地控制可控伸縮輪交替伸縮,可以使移動機器人平穩攀爬樓梯。

圖13 伸縮部位初始狀態
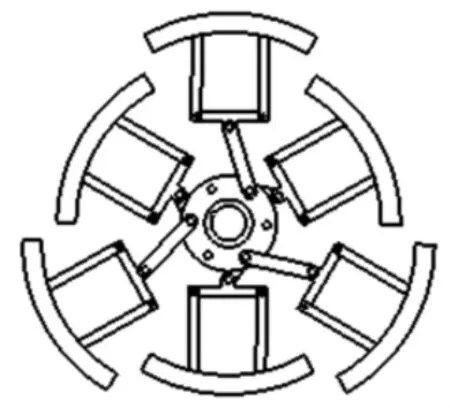
圖14 伸縮部位旋轉狀態
2 基于可控伸縮輪的移動機器人
以可控伸縮輪為基礎實現智能移動機器人設計。
2.1 障礙物分析系統
將攝像頭和超聲波傳感器結合實現障礙物識別分析。基本原理為:1)對攝像頭數據進行初步處理后得到的圖像信息進行識別,通過區域生長算法將超聲波前方的障礙物提取出來(如圖15、圖16),然后進行數據分析得到障礙物的相對尺寸:高度和寬度。2)對超聲波傳感器數據進行處理,得到移動機器人到障礙物的距離,將距離和攝像頭的焦距對比得到圖像相對于實際的比例,再將障礙物的相對尺寸與比例相乘即可得到障礙物的實際高度和寬度。

圖15 原圖

圖16 區域生長圖
目前研究處于初步階段,障礙物只區分是否為一般階梯,是則激活攀爬系統,否則激活避障。一般階梯與其他障礙物的區別如圖17所示。
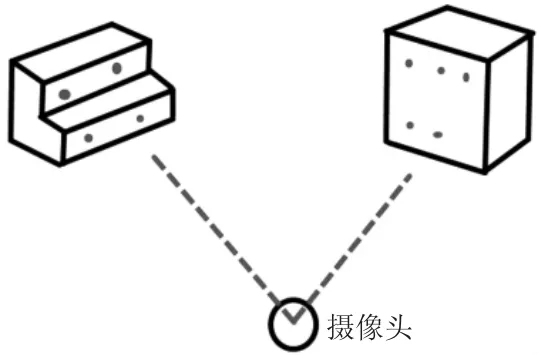
圖17 階梯與其他障礙物
選取不同高度h1、h2……hn,每個高度任意抽取m個點,并得到每個點與攝像頭的水平距離L(n,m),然后計算每個高度對應的平均水平距離L平(n),滿足以下兩個條件即可觸發攀爬模式。
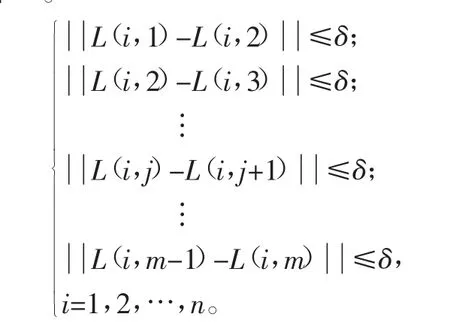
1)條件一。式中,δ為誤差值。
條件一是判斷同一高度下選擇的點水平距離是否相近,符合條件即可進行下一個條件判斷,否則該障礙物不是一般階梯。
2)條件二。
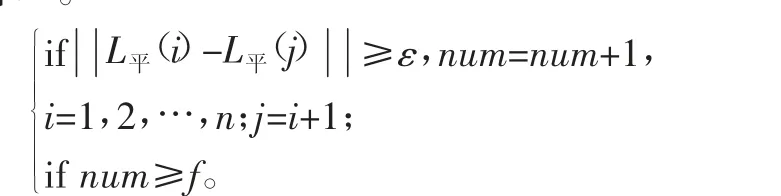
式中:ε為誤差值;f為某個整數值。
條件二是判斷不同高度下,平均水平距離是否相差大,即兩個平面間是否有一定的水平差距,當num超過閾值f,說明該障礙物為一般階梯,否則該障礙物不是一般階梯。同時滿足兩個條件,將激活攀爬模式。
2.2 攀爬系統
伸縮輪的控制分為手動模式和自動模式兩種。手動模式:由操作員控制伸縮輪的伸縮長度和伸縮輪的變形。自動模式:由操作員設置伸縮長度或者使用通過傳感器數據分析得到的最適宜伸縮長度。然后移動機器人以最適宜伸縮長度攀爬樓梯,直到機器人再一次在一定范圍內識別到障礙物時停止運行,重新進行障礙物識別。
在車輪直徑變化有限的條件下,一味增大伸縮輪的直徑對移動機器人攀爬樓梯并不是好事,選擇一個合適直徑更為重要。根據搜尋的資料來看(如圖18),一般階梯長度L和高度H的比值在1.75~2.25 之間,這里取平均值為2,伸縮輪直徑的取值按照下列簡單公式計算:
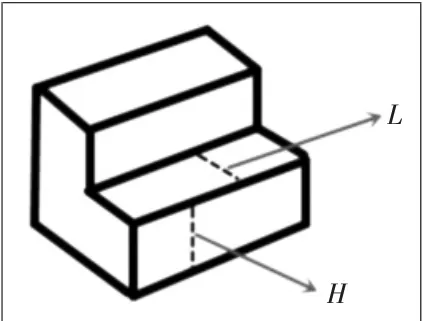
圖18 階梯模型
其中,σ為一個偏差值。
2.3 遠程控制
遠程終端與移動機器人通過無線通信模塊通信,移動機器人通過通信模塊將傳感器數據傳輸給遠程終端,傳感器數據包括經視頻模塊處理的攝像頭數據、超聲波測距模塊數據和電動機角度反饋數據。遠程終端通過通信模塊將命令指令發送給移動機器人的控制主板,控制主板按指令控制各個電動機驅動調速模塊,然后電動機驅動模塊再對各個電動機進行控制。
2.4 遠程控制軟件框架
如圖20、圖21所示,功能主要包括視頻監測區、移動機器人信息監測區、車輪直徑調整區和車體運動控制區,視頻監測區顯示攝像頭信息,移動機器人信息監測區顯示移動機器人電壓、左右車輪轉速、左右車輪旋轉角度、左右車輪伸縮機構驅動電動機旋轉角度、障礙物模擬顯示等,車輪直徑調整區有一鍵車體復位、左右輪內置電動機調速和手動調整左右輪伸縮按鍵,車體運動控制區包括基本的運動控制和智能樓梯攀爬按鍵。
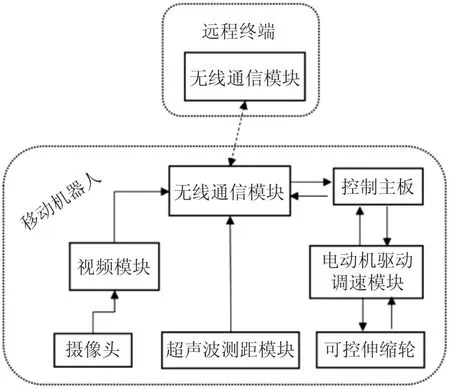
圖19 控制框架
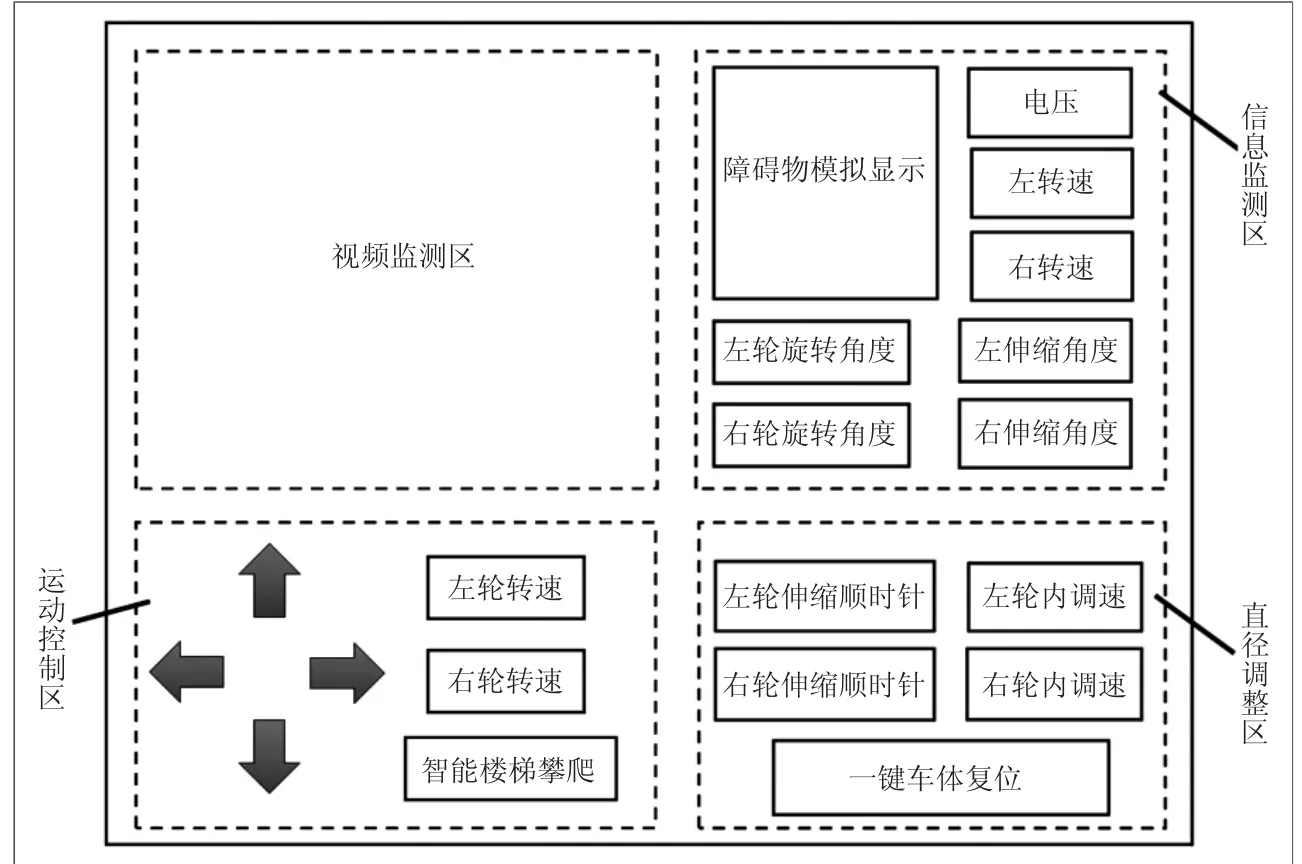
圖20 終端控制界面
3 仿真實驗
仿真實驗分兩步:1)可控伸縮輪交替伸縮仿真實驗;
2)基于可控伸縮輪的移動機器人樓梯攀爬模擬。
在音樂劇演員拿到劇本時首先應該明白——我是誰,經歷了什么事?他是帶著什么樣的情緒進入這一場次的?他的下一步行動又是什么?亦即角色之過去、現在和未來。當年在蘭陵劇坊的某次公演中,我看到一個讓我印象深刻的畫面:飾演家庭主婦的某位女演員,上場前站在側臺邊,挽起袖子佯作炒菜的樣子。我當時不能完全理解“到底她在干嗎”,后來等她一轉身上臺,我就看懂了:這位女演員上了舞臺之后,拉了兩下袖子,用手輕拭額頭的汗水——活像在廚房忙進忙出的樣子。就是這兩個細微的動作,讓我們知道這個角色“從哪里來”。這樣的表演不但具有說服力,也讓我們知道角色和空間的關系。
3.1 可控伸縮輪交替伸縮仿真實驗
直接利用SoildWorks對3D仿真圖進行運動仿真,結果如圖21、圖22所示。
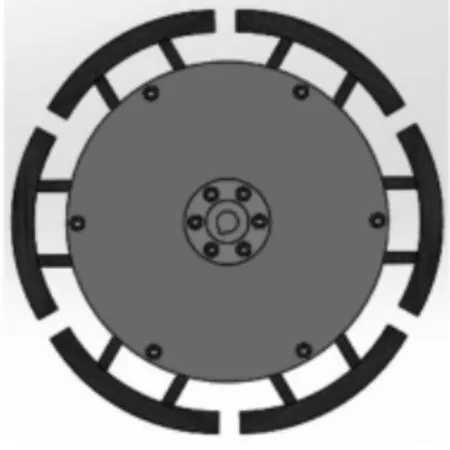
圖21 可控伸縮輪正常狀態

圖22 可控伸縮輪伸縮狀態
3.2 基于可控伸縮輪的移動機器人樓梯攀爬模擬
根據圖23~圖30,移動機器人運行至樓梯前(如圖24)

圖23 樓梯攀爬模擬進程1
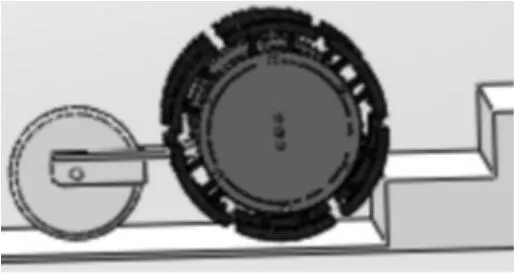
圖24 樓梯攀爬模擬進程2
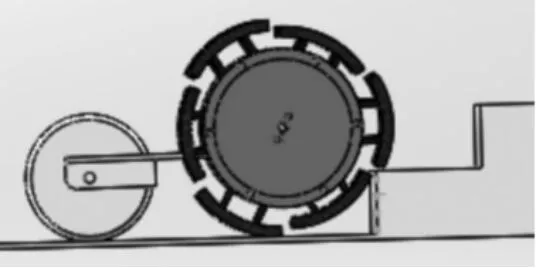
圖25 樓梯攀爬模擬進程3
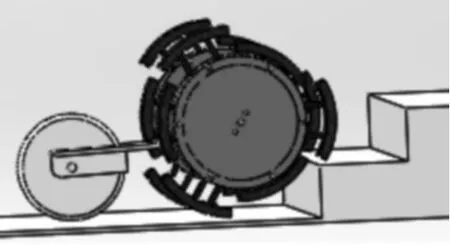
圖26 樓梯攀爬模擬進程4
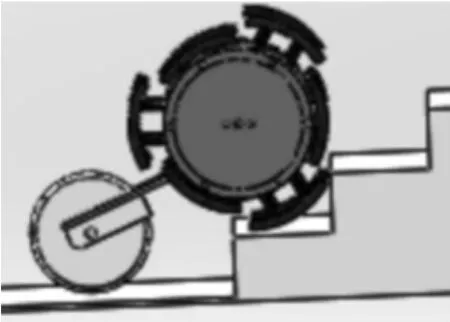
圖27 樓梯攀爬模擬進程5
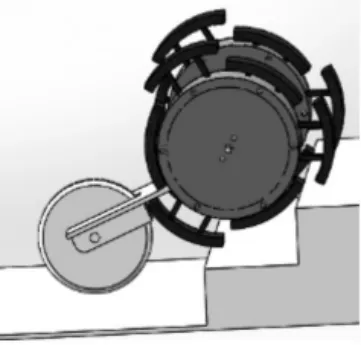
圖28 樓梯攀爬模擬進程6
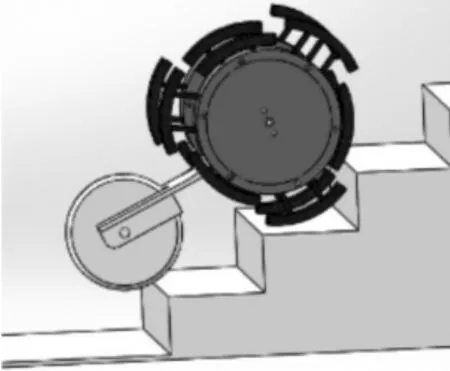
圖29 樓梯攀爬模擬進程7
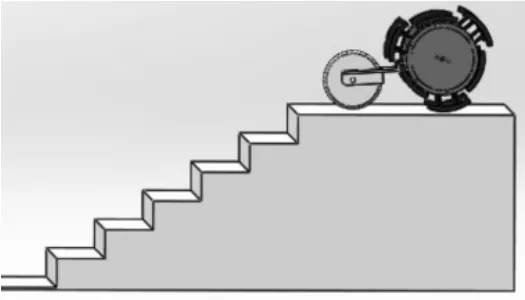
圖30 樓梯攀爬模擬進程8
4 結語
本文主要是針對爬樓梯功能進行了研究,提出了一種樓梯攀爬結構——可控伸縮輪,通過仿真實驗進行了驗證,通過可控伸縮輪的自由交替伸縮,可以平穩地通過樓梯。還提出了智能樓梯攀爬方式,通過區域生長算法將攝像頭圖像中的障礙物識別出來,然后利用超聲波測距,得到障礙物的實際高度和寬度,將障礙物的尺寸和可控伸縮輪的伸縮結合,實現移動機器人的智能樓梯攀爬。
對于不同的地形,同樣可以使用可控伸縮輪,只要對可控伸縮輪的伸縮控制和車輪速度進行調整即可。可控伸縮輪具有較強的環境適應性,可用于各種地形。后續還可以研究車輪速度、伸縮輪變形和階梯高度寬度之間的關系,實現更加精密的樓梯攀爬。停下,然后開始樓梯攀爬,移動機器人開始調節伸縮輪的直徑(如圖25),階梯給輪腿邊緣提供支撐力,再加上車輪旋轉,使得移動機器人攀爬樓梯(如圖26),然后移動機器人按相同的運動模式爬到樓梯的頂部。
從仿真結果來看,可控伸縮輪可在一定范圍內自由地交替伸縮,而基于可控伸縮輪的移動機器人具備樓梯攀爬的能力,增強了移動機器人的越障能力,提高了移動機器人的環境適應性。
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中國慣性技術學報(2019年3期)2019-10-15 07:21:02
電子測試(2018年15期)2018-09-26 06:01:34
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統學報(2015年4期)2015-12-27 09:38:35
機電產品開發與創新(2014年5期)2014-03-11 16:42:32
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:09
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19
