預(yù)期功能安全場景庫復(fù)雜度量化方法研究
2022-02-20 13:49:40龐智恒唐春蓬李光平
汽車工程學(xué)報 2022年1期
關(guān)鍵詞:系統(tǒng)
龐智恒,唐春蓬,李光平
(1.中國汽車工程研究院股份有限公司,重慶 401147;2.智能汽車電子信息安全評價技術(shù)重慶市工業(yè)和信息化重點實驗室,重慶 401147)
自動駕駛汽車因安全問題導(dǎo)致危害的主要原因包括兩方面:(1)由于電子電器故障或軟件系統(tǒng)失效而導(dǎo)致的危害。對于該原因,ISO 提出了ISO 26262《道路車輛—功能安全標(biāo)準(zhǔn)》,而國內(nèi)提出了對應(yīng)的GB/T 34590《道路車輛—功能安全標(biāo)準(zhǔn)》。(2)由于系統(tǒng)性能不足或合理預(yù)見的人為誤用而導(dǎo)致的危害。對于該原因,ISO 提出了ISO/PAS 21448 Safety of the Intended Functionality,簡稱SOTIF 標(biāo)準(zhǔn)。
在SOTIF 標(biāo)準(zhǔn)中,將自動駕駛汽車行駛時面臨的場景分為4 類:已知安全場景、已知不安全場景、未知安全場景以及未知不安全場景,如圖1 所示。對于已知安全場景和未知安全場景,在SOTIF 標(biāo)準(zhǔn)中并未給予關(guān)注。對于已知危險場景,SOTIF 標(biāo)準(zhǔn)提出了一套方法論。其目的是提高自動駕駛汽車相關(guān)系統(tǒng)的性能或縮小相關(guān)系統(tǒng)的運行區(qū)域范圍,并基于相關(guān)場景庫進行測試與驗證,即將已知危險場景轉(zhuǎn)化為已知安全場景。而對于未知危險場景,則可以基于場景庫進行大量的試驗,以此發(fā)現(xiàn)和探測出相關(guān)系統(tǒng)存在的安全隱患場景,即將未知危險場景轉(zhuǎn)化成已知危險場景。最后,基于上述方法論,將已知危險場景轉(zhuǎn)化為已知安全場景。總之,SOTIF 標(biāo)準(zhǔn)的目標(biāo)是盡可能地擴大自動駕駛汽車相關(guān)系統(tǒng)在運行時所面臨的已知安全和未知安全場景的范圍,從而盡可能地縮小已知危險和未知危險場景的范圍,如圖2 所示。要實現(xiàn)上述目標(biāo),其中一個關(guān)鍵因素是構(gòu)建高質(zhì)量的預(yù)期功能安全場景庫。
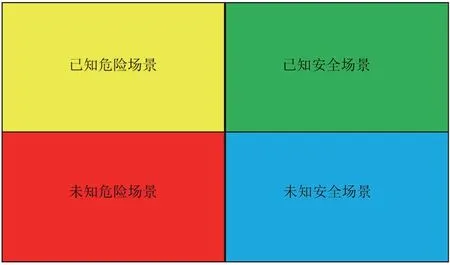
圖1 行駛場景
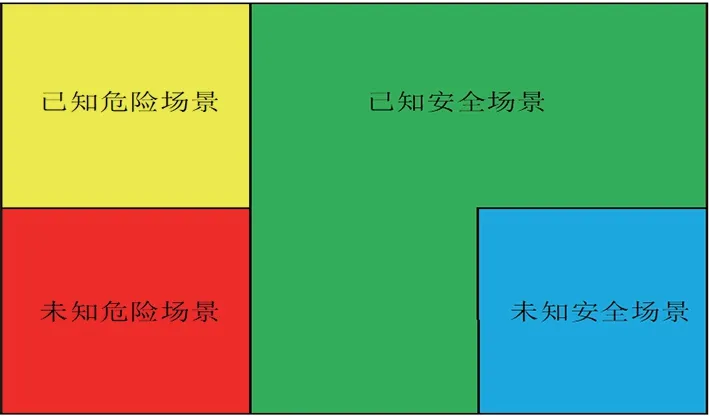
圖2 優(yōu)化后的行駛場景
目前,許多企業(yè)和組織都構(gòu)建了自己的預(yù)期功能安全場景庫。例如:Kitti 場景庫、NuScenes場景庫、Lyft 自動駕駛汽車場景庫等。大多數(shù)企業(yè)和組織在場景庫的構(gòu)建過程中重點關(guān)注場景庫數(shù)據(jù)的收集,而對收集到的場景數(shù)據(jù)質(zhì)量卻缺乏合理的量化指標(biāo)。這無疑帶來了兩個問題:(1)場景庫中可能包含著大量重復(fù)且低質(zhì)量的場景數(shù)據(jù),導(dǎo)致基于場景庫的試驗時間過長,甚至無法發(fā)現(xiàn)自動駕駛汽車的性能缺陷,降低了試驗結(jié)果可信度。(2)不同場景庫之間無法進行優(yōu)劣性比較,導(dǎo)致自動駕駛汽車場景庫試驗無法選擇最優(yōu)的場景庫數(shù)據(jù)。因此,采用一種科學(xué)合理的場景庫質(zhì)量量化方法是十分必要的。
場景數(shù)據(jù)越復(fù)雜,對相關(guān)系統(tǒng)的挑戰(zhàn)越大,探測出相關(guān)系統(tǒng)性能缺陷的可能性就越大。因此,可以認(rèn)為場景數(shù)據(jù)的復(fù)雜度是影響場景庫質(zhì)量的關(guān)鍵因素之一。本文提出了一種量化場景數(shù)據(jù)復(fù)雜度的方法。該方法是基于德國Pegasus 項目的場景分層體系,對場景中的要素進行分類統(tǒng)計,以計算場景數(shù)據(jù)中要素的復(fù)雜度,并以此評估場景數(shù)據(jù)的質(zhì)量。
1 Pegasus 場景分層體系
Pegasus 項目由德國汽車行業(yè)相關(guān)企業(yè)和研究機構(gòu)共同發(fā)起,以制定與自動駕駛汽車相關(guān)的一系列測試標(biāo)準(zhǔn)為目的。該項目提出了一種場景分層體系,即在場景中根據(jù)場景要素的不同將其分為6 層場景,見表1。
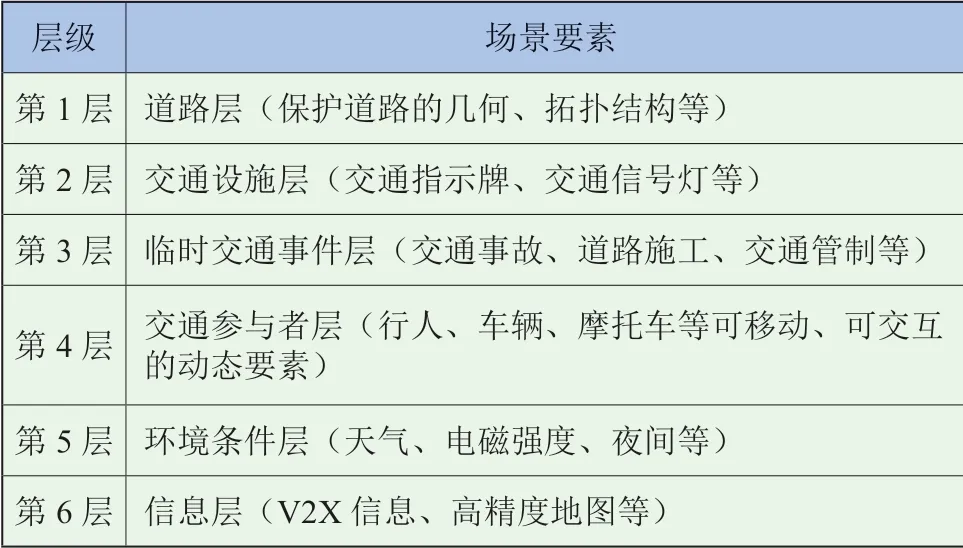
表1 場景分層
場景數(shù)據(jù)如圖3 所示。基于Pegasus 場景分層體系,可以將場景數(shù)據(jù)進行分層,見表2。

圖3 場景數(shù)據(jù)

表2 場景分層示例
2 場景數(shù)據(jù)復(fù)雜度量化方法
Pegasus 場景分層體系將場景要素進行分層。本文進一步對每一層要素進行分析,量化每層要素復(fù)雜度。
道路層的復(fù)雜度主要由車道線的可視性決定,見表3。對于清晰的車道線,其復(fù)雜度規(guī)定為1;被遮擋或磨損的車道線,會影響車道線的識別,其復(fù)雜度為2;路面積水、覆冰覆蓋車道線,不但影響車道線識別,還會造成行車?yán)щy,其復(fù)雜度為3;不規(guī)則的車道線可能會引起車道線誤識別,導(dǎo)致車輛行駛方向錯誤,其復(fù)雜度為4;無車道線場景可能影響車輛行駛方向,其復(fù)雜度為5。
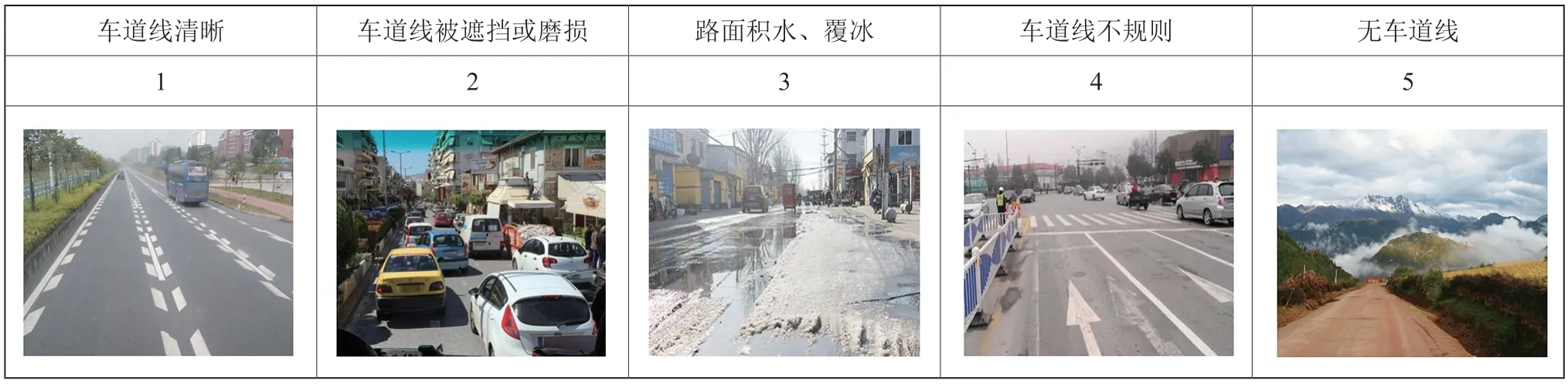
表3 道路層復(fù)雜度
交通設(shè)施層的復(fù)雜度主要由交通設(shè)施的可視性決定,見表4。無交通設(shè)施的場景,其復(fù)雜度為1;交通設(shè)施清晰的場景,其復(fù)雜度為2;交通設(shè)施距離過遠(yuǎn)導(dǎo)致無法清晰識別的場景,其復(fù)雜度為3;交通設(shè)施反光、臟污等導(dǎo)致難以識別的場景,其復(fù)雜度為4;交通設(shè)施不規(guī)則,可能引起錯誤識別,導(dǎo)致車輛闖紅燈等危險行為,其復(fù)雜度為5。
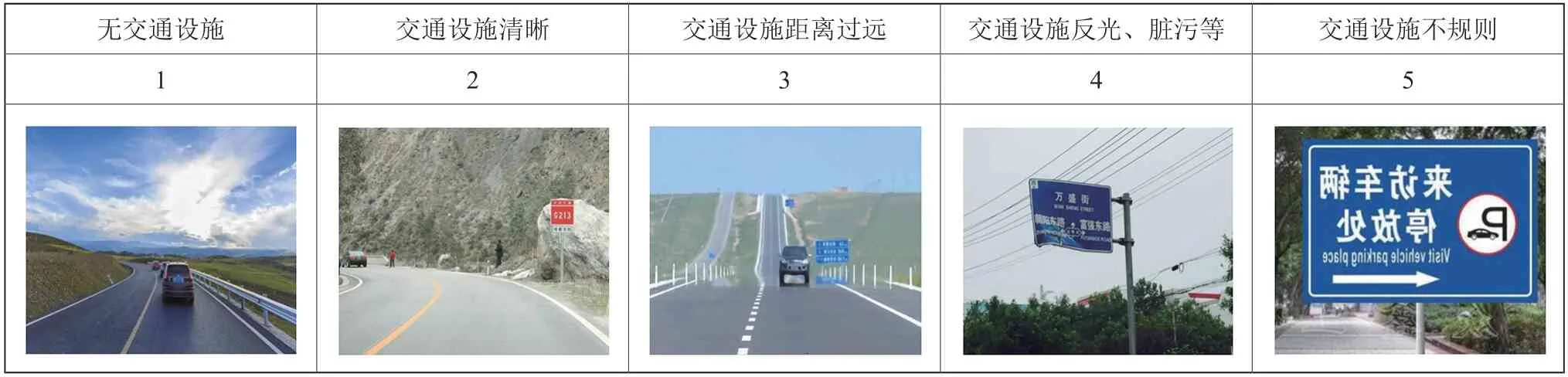
表4 交通設(shè)施層復(fù)雜度
臨時交通事件層的復(fù)雜度主要由其事件的偶然性和可預(yù)見性決定,見表5。無臨時交通事件,其復(fù)雜度為1;交通管制等有專人維護現(xiàn)場的臨時交通事件,其復(fù)雜度為2;道路施工等有警告指示牌的臨時交通事件,其復(fù)雜度為3;交通事故等對行車有較大影響的臨時交通事件,其復(fù)雜度為4;落石、掉落的車輪等偶發(fā)性很強且難以預(yù)見的臨時交通事件,其復(fù)雜度為5。
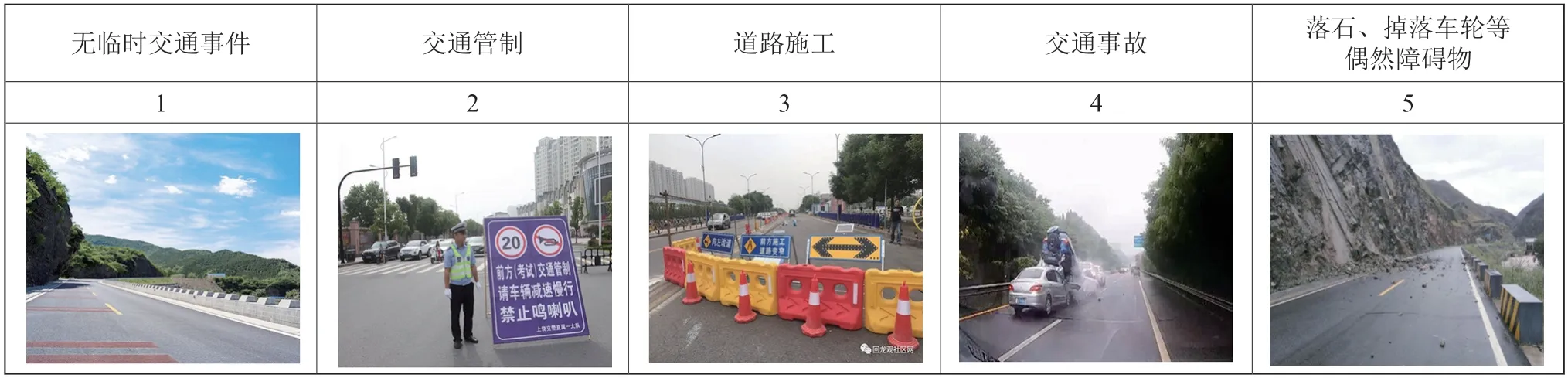
表5 臨時交通事件層復(fù)雜度
交通參與者層的復(fù)雜度由參與者的常見性和合規(guī)性決定,見表6。無交通參與者,其復(fù)雜度為1;只包含車輛的場景,其復(fù)雜度為2;包含行人、自行車等常見參與者且位于法規(guī)規(guī)定位置(如人行道、自行車道等),其復(fù)雜度為3;包含行人、自行車等常見參與者且不位于法規(guī)規(guī)定位置(行人橫穿馬路、自行車行駛在機動車道上等),其復(fù)雜度為4;不常見的交通參與者(如拖著大象的貨車、騎著馬的行人等),其復(fù)雜度為5。
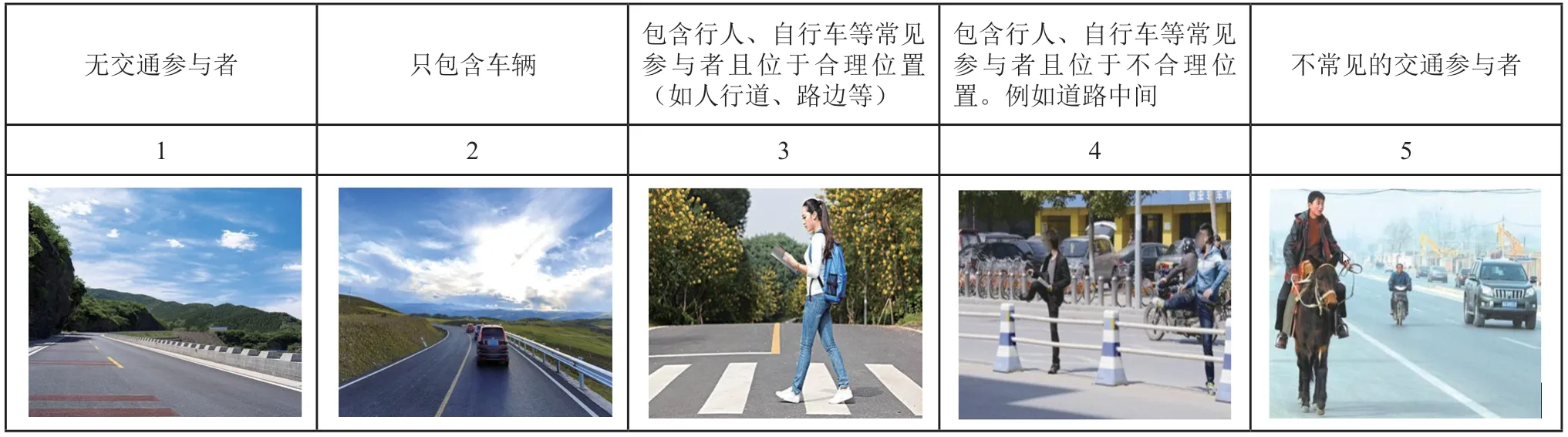
表6 交通參與者層復(fù)雜度
環(huán)境條件層的復(fù)雜度主要由可見度決定,見表7。晴天高可見度,其復(fù)雜度為1;雨天、傍晚中可見度,其復(fù)雜度為2;夜晚有環(huán)境燈光,其復(fù)雜度為3;夜晚無環(huán)境燈光,可見度較低,其復(fù)雜度為4;濃霧天可見度極低,其復(fù)雜度為5。
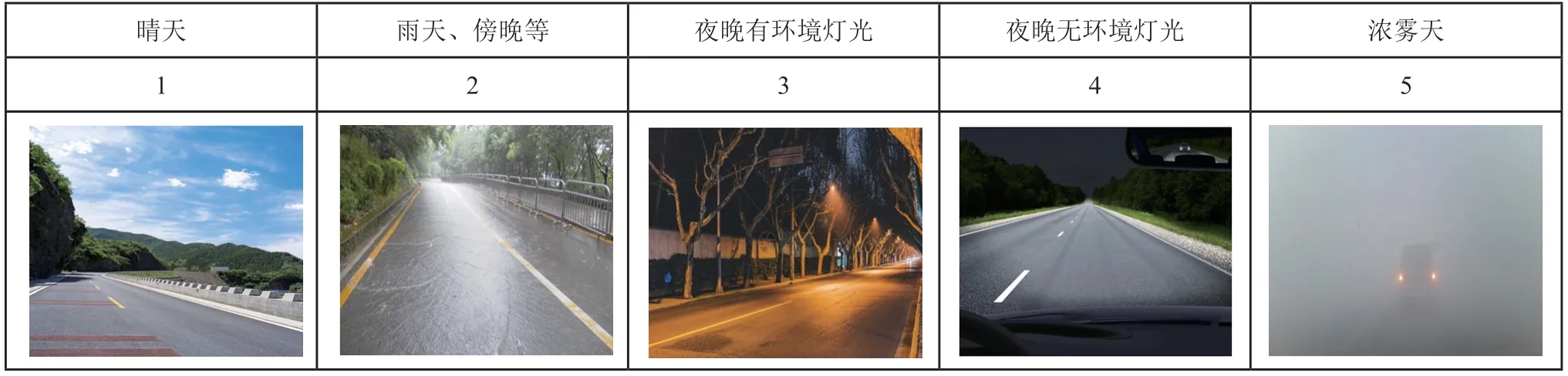
表7 環(huán)境條件層復(fù)雜度
信息層的復(fù)雜度主要由是否有交通信息決定,見表8。有高精度地圖或V2X 提供交通信息,則復(fù)雜度為1;無高精度地圖或V2X 提供交通信息,則復(fù)雜度為2。
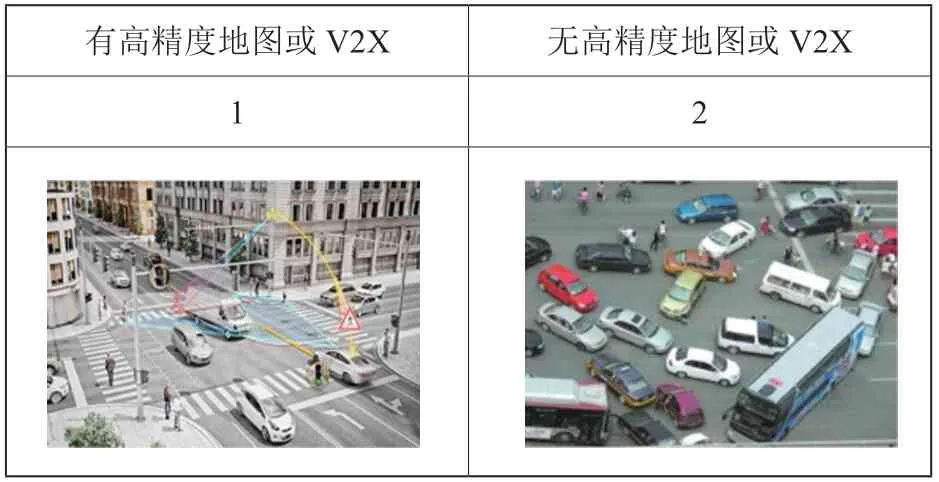
表8 信息層復(fù)雜度
通過上述分層方式以及每層的復(fù)雜度量化方式,可以計算出單個場景數(shù)據(jù)的復(fù)雜度,即每層復(fù)雜度之和。例如:圖3 場景數(shù)據(jù),其復(fù)雜度為18(每層復(fù)雜度見表9)。

表9 場景數(shù)據(jù)復(fù)雜度
對于整個場景庫而言,將每個場景數(shù)據(jù)的復(fù)雜度相加再除以場景庫中場景數(shù)據(jù)總數(shù),得到整個場景庫的復(fù)雜度。根據(jù)場景庫復(fù)雜度可對比不同場景庫的質(zhì)量。
值得注意的是,由于篇幅限制,上述每層復(fù)雜度表中并沒有列舉和覆蓋所有要素。對于沒有列舉或覆蓋的要素,應(yīng)根據(jù)所在層復(fù)雜度的決定因素來確定其復(fù)雜度。例如:環(huán)境條件層復(fù)雜度的決定因素是可見度,那么對于沒有列舉出的濃度較低的霧天,其可見度與夜晚有環(huán)境燈光的可見度相當(dāng),因此其復(fù)雜度為3。
3 場景數(shù)據(jù)復(fù)雜度修正
在采用上述復(fù)雜度量化方法構(gòu)建場景庫時,容易出現(xiàn)“過復(fù)雜”現(xiàn)象,即為了追求場景庫復(fù)雜度,場景庫只收集高復(fù)雜度的場景,致使場景庫復(fù)雜度雖然很高卻都是出現(xiàn)概率很低的場景,最終導(dǎo)致不能發(fā)現(xiàn)系統(tǒng)的性能缺陷。為了避免“過復(fù)雜”現(xiàn)象,本文提出“母子庫”和“系統(tǒng)場景概率”兩個概念。
3.1 母子庫
在實際場景庫收集過程中,采取隨機地點、隨機時間段、隨機氣候等的隨機收集方式收集到的數(shù)據(jù)構(gòu)成“母庫”。然后,針對相關(guān)系統(tǒng)的特性與運行域,從“母庫”中提取出“子庫”。例如:對于只適用于高速公路的自動駕駛系統(tǒng),從“母庫”中提取高速公路的場景數(shù)據(jù),并形成“子庫”。例如:針對特定城市開發(fā)的自動駕駛系統(tǒng),從“母庫”中提取出該城市的場景數(shù)據(jù),形成針對該系統(tǒng)的“子庫”。
值得注意的是:理論上,既可以先構(gòu)建“母庫”,再提取“子庫”,也可以先構(gòu)建“子庫”,再匯集成“母庫”。但本文建議采用“先母后子”的方法。因為“母庫”的構(gòu)建是隨機的,所以從“母庫”中提取的“子庫”也具有隨機的屬性。如果先構(gòu)建“子庫”,又因為“子庫”是針對特定系統(tǒng)的,那么在構(gòu)建過程中難以做到完全隨機。
3.2 系統(tǒng)場景概率
對于從“母庫”中提取出的“子庫”,進一步分析其場景中每層要素在系統(tǒng)運行過程中出現(xiàn)的概率,即系統(tǒng)場景概率。例如:對于只適應(yīng)于高速公路的自動駕駛系統(tǒng),交通參與者層中出現(xiàn)只包含車輛的概率(復(fù)雜度2)是遠(yuǎn)高于出現(xiàn)行人、自行車的概率(復(fù)雜度3)。因此,在評估該層要素的復(fù)雜度時,還需要將復(fù)雜度乘以一個概率系數(shù),得出該層最終的復(fù)雜度。其公式為:
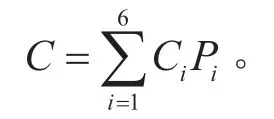
式中:為該場景數(shù)據(jù)的最終復(fù)雜度;C為第層場景要素的復(fù)雜度;P為第層場景要素在相關(guān)系統(tǒng)運行時出現(xiàn)的概率系數(shù)。
3.3 防止“過復(fù)雜”現(xiàn)象
通過“母子庫”和“系統(tǒng)場景概率”可以避免“過復(fù)雜”現(xiàn)象。主要原因有:(1)在構(gòu)建“母庫”時,采用了隨機地點、隨機時間段、隨機氣候等的隨機收集方式,降低了“母庫”收集過程中的人為因素。(2)針對特定系統(tǒng),從“母庫”中提取相關(guān)“子庫”,間接避免了“子庫”中的人為因素。(3)根據(jù)該系統(tǒng)運行時場景出現(xiàn)概率及其復(fù)雜度,計算出最終場景復(fù)雜度。將復(fù)雜度與概率這個客觀因素結(jié)合,避免了人為因素的影響。例如:對于高復(fù)雜度、低概率的場景要素或?qū)τ诘蛷?fù)雜度、高概率的場景要素,其最終場景復(fù)雜度的值可能較低。
3.4 概率系數(shù)取值
針對不同系統(tǒng),其概率系數(shù)是不一樣的。例如:僅限于高速公路使用的系統(tǒng),交通參與者層中出現(xiàn)只包含車輛的概率系數(shù)大于出現(xiàn)行人、自行車的概率系數(shù);對于可以用于城市交通場景的系統(tǒng),交通參與者層中出現(xiàn)行人、自行車的概率系數(shù)大于只包含車輛的概率系數(shù)。此外,對于相同系統(tǒng),處在無人駕駛發(fā)展進程的不同階段,其概率系數(shù)也可能是不相同的。例如:現(xiàn)階段,信息層中有高精度地圖或V2X 的系統(tǒng),其概率系數(shù)低于沒有高精度地圖或V2X 的系統(tǒng)的概率系數(shù)。而在無人駕駛發(fā)展進程后期,有高精度地圖或V2X 的系統(tǒng),其概率系數(shù)可能高于沒有高精度地圖或V2X 的系統(tǒng)的概率系數(shù)。
因此,針對不同系統(tǒng),需要從其運行范圍、地點、時間、目標(biāo)市場以及整體市場水平等多方面進行考量,以此來確定其不同場景要素的概率系數(shù)。
4 結(jié)論
為了滿足ISO/PAS 21448 的要求,需要構(gòu)建預(yù)期功能安全場景庫。而場景庫的構(gòu)建質(zhì)量缺乏相應(yīng)的量化指標(biāo),本文基于Pegasus 場景分層體系,量化每層要素的復(fù)雜度,以此評定場景庫的質(zhì)量。同時,為了避免“過復(fù)雜度”現(xiàn)象,提出了“母子庫”和“系統(tǒng)場景概率”兩個概念,闡述了如何構(gòu)建“母子庫”以及如何計算“系統(tǒng)場景概率”,并以此提出了最終復(fù)雜度的計算方法。本文中提到的量化方法以及防止“過復(fù)雜度”方法對預(yù)期功能安全場景庫的建立和推進起到指示作用。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32