基于等效力的汽車主動(dòng)避撞模型及其仿真
2022-02-20 13:49:46譚子坤朱孫科羅天洪鄭訊佳
汽車工程學(xué)報(bào) 2022年1期
譚子坤,朱孫科,羅天洪,鄭訊佳,3,4
(1.重慶交通大學(xué)機(jī)電與車輛學(xué)院,重慶400074;2.重慶文理學(xué)院智能制造工程學(xué)院,重慶402160;3.汽車噪聲振動(dòng)和安全技術(shù)國(guó)家重點(diǎn)實(shí)驗(yàn)室,重慶401122;4.中國(guó)汽車工程研究院股份有限公司,重慶401122)
隨著汽車保有量的日益增多,引發(fā)的交通安全問題也日益嚴(yán)重。20 世紀(jì)80 年代以來,汽車防抱死系統(tǒng)(Anti-lock Braking System,ABS)、車身穩(wěn)定性程序(Electronic Stability Program,ESP)等主動(dòng)安全系統(tǒng)被人們普遍認(rèn)可。近年來,以汽車前撞預(yù)警系統(tǒng)(Forward Collision Warning,F(xiàn)CW)、車道偏離預(yù)警系統(tǒng)(Lane Departure Warning,LDW)、自動(dòng)緊急制動(dòng)系統(tǒng)(Automatic Emergency Braking,AEB)為代表的高級(jí)駕駛輔助系統(tǒng)得到快速發(fā)展,在汽車安全方面發(fā)揮著至關(guān)重要的作用。
在美國(guó)高速公路交通安全署(National Highway Traffic Safety Administration,NHTSA)的大力推動(dòng)下,汽車主動(dòng)避撞系統(tǒng)得到快速發(fā)展,許多模型被相繼提出。比較有代表性的模型有:避撞時(shí)間TTC(Time to Collision)模 型、車 頭 時(shí) 距(Time Headway)模型、Berkeley 模型和馬自達(dá)模型,在汽車橫向上有CCP模型、TLC 模型和VRBS模型。王建強(qiáng)等通過真實(shí)道路試驗(yàn)獲得乘用車駕駛員特性試驗(yàn)數(shù)據(jù),得到不同類型駕駛員跟車行為特性參數(shù),提出了適應(yīng)駕駛員特性的TTC報(bào)警算法。胡遠(yuǎn)志等利用駕駛員特性提出一種新型TTC 建模方法。冀杰等利用三角函數(shù)和指數(shù)函數(shù),構(gòu)建了道路和障礙物三維虛擬危險(xiǎn)勢(shì)能場(chǎng)來全面反映不同道路路況下的車路一體化危險(xiǎn)行車狀況,實(shí)現(xiàn)主動(dòng)避撞。
上述模型和文獻(xiàn)僅從人或路因素來判斷汽車的行車安全性,從而達(dá)到主動(dòng)避撞的目的。但汽車行車過程中是人-車-路相互耦合的關(guān)系,三者的變化都會(huì)影響汽車主動(dòng)避撞效果。章軍輝等建立了基于BP 神經(jīng)網(wǎng)絡(luò)的閉環(huán)駕駛跟馳習(xí)慣模型,該網(wǎng)絡(luò)模型包含人-車-路3 個(gè)因素作為輸入,通過BP神經(jīng)網(wǎng)絡(luò)的訓(xùn)練之后,該理論模型對(duì)不同的駕駛?cè)后w擁有良好的適應(yīng)性。WANG Jianqiang 等利用行車風(fēng)險(xiǎn)場(chǎng)將汽車行車過程分為行為場(chǎng)、動(dòng)能場(chǎng)和勢(shì)能場(chǎng),分別包含了人-車-路3 個(gè)因素來判斷汽車的行車安全。這兩種主動(dòng)避撞模型考慮了人-車-路3個(gè)因素,汽車的主動(dòng)避撞效果較好,但模型復(fù)雜,參數(shù)難以標(biāo)定。
上述模型考慮了人-車-路3 個(gè)因素,但模型比較復(fù)雜。因此,本文在ZHENG Xunjia 等提出的等效力理論基礎(chǔ)上,加入人-車-路3 個(gè)因素中的主要因素,為汽車主動(dòng)避撞提供了一個(gè)新模型。該模型與不同行車環(huán)境中的標(biāo)準(zhǔn)等效力模型相比,能夠保證汽車主動(dòng)避撞效果和汽車跟馳距離。
1 行車風(fēng)險(xiǎn)量化
1.1 行車風(fēng)險(xiǎn)的場(chǎng)模型
智能汽車根據(jù)車載設(shè)備實(shí)時(shí)監(jiān)測(cè)目標(biāo)車輛周圍的車輛信息和自身行車狀態(tài),通過算法處理復(fù)雜的車輛信息進(jìn)行行車風(fēng)險(xiǎn)評(píng)估。行車風(fēng)險(xiǎn)場(chǎng)定義為各研究對(duì)象間場(chǎng)的相互作用,用以描述人在交通環(huán)境中對(duì)風(fēng)險(xiǎn)的辨識(shí),行車風(fēng)險(xiǎn)通常發(fā)生在汽車之間,或汽車本身與道路環(huán)境之間,行車風(fēng)險(xiǎn)不能獨(dú)立存在。因此,在汽車行車過程中兩個(gè)對(duì)象之間的風(fēng)險(xiǎn)用場(chǎng)表示為:

式中:為行車過程的場(chǎng)源;為道路中的某一點(diǎn);U為場(chǎng)源在處的勢(shì)場(chǎng)能;M為行車過程中的自身屬性;v為場(chǎng)源的速度;d為場(chǎng)源到的距離函數(shù);F為勢(shì)場(chǎng)能U的負(fù)梯度,即點(diǎn)處受到的場(chǎng)力,負(fù)號(hào)代表沿場(chǎng)梯度下降的方向,當(dāng)場(chǎng)源屬性和運(yùn)動(dòng)狀態(tài)一定時(shí),越靠近場(chǎng)源所受到的場(chǎng)力越大。
1.2 等效力模型
在汽車的駕駛過程中,每輛汽車都具有動(dòng)能,汽車從起步開始加速至某一速度的過程中,實(shí)際上是汽車動(dòng)能不斷增長(zhǎng)的儲(chǔ)能過程,若在某一時(shí)刻與某一物體發(fā)生碰撞事故,則其儲(chǔ)存的能量將釋放和轉(zhuǎn)移并導(dǎo)致彈性和塑性變形。在碰撞過程中,動(dòng)能越大造成的損失就越大。
通過文獻(xiàn)[13]和[14]分析了汽車碰撞過程中力做功和能量轉(zhuǎn)化之間的關(guān)系,得出等效力。對(duì)于單個(gè)運(yùn)動(dòng)過程中的汽車q,則有:

式中:、分別為汽車q 的動(dòng)能、質(zhì)量、速度;為在汽車q 運(yùn)動(dòng)方向上的任意一點(diǎn)與汽車q之間的距離。
令:

則式(3)可寫為:

式中:為運(yùn)動(dòng)的汽車q 在交通環(huán)境中對(duì)點(diǎn)產(chǎn)生的等效力,并用其描述汽車對(duì)交通環(huán)境中點(diǎn)造成的風(fēng)險(xiǎn),單位為N。
由于在汽車行駛過程中,只有在一定的距離時(shí)才能夠影響后方車輛,超過一定距離的時(shí)候?qū)⒉粫?huì)對(duì)后方車輛造成影響,所以修正之后的等效力為:
式中:為駕駛?cè)说母嚲嚯x,它與駕駛員的駕駛特性有關(guān);為前車與后車之間的距離;為前車最大影響距離。
2 主動(dòng)避撞模型以及策略
2.1 主動(dòng)避撞模型
圖1 為汽車i 和汽車j 的跟馳場(chǎng)景。在縱向上,當(dāng)汽車進(jìn)入危險(xiǎn)時(shí)刻時(shí),汽車主動(dòng)避撞系統(tǒng)開始預(yù)警避撞,所以本文只考慮后方汽車在前方汽車的等效力作用范圍之內(nèi)。在前方汽車的等效力范圍之外,汽車將不受等效力的作用。

圖1 汽車i和汽車j的跟馳場(chǎng)景
將道路因子和速度因子加入等效力的模型中,則汽車的主動(dòng)避撞模型為:

式中:為當(dāng)前道路因子,因在道路因子中路面的附著系數(shù)會(huì)影響汽車的制動(dòng)距離,這會(huì)大大地影響汽車的跟馳距離以及主動(dòng)避撞系統(tǒng)介入時(shí)間,所以本文在道路因子中只考慮路面附著系數(shù);為速度因子,在汽車行車過程中,當(dāng)某車的速度與其他汽車的速度有明顯不同時(shí),將造成交通擾動(dòng),交通擾動(dòng)是破壞交通穩(wěn)定性造成交通擁堵的重要原因,在擁堵的交通中,更易發(fā)生交通事故。所以當(dāng)汽車的速度與其他汽車的速度明顯不同時(shí),行車過程中的風(fēng)險(xiǎn)會(huì)增加,速度差越大,受到的風(fēng)險(xiǎn)越大。
駕駛?cè)说母嚲嚯x,根據(jù)文獻(xiàn)[20]將駕駛員分為3 類,分別為:冒進(jìn)性、平穩(wěn)性、保守性,他們所對(duì)應(yīng)的跟車時(shí)距為1.82 s、2.50 s、3.03 s。數(shù)值設(shè)定為:

式中:為不同駕駛員的跟車時(shí)距;為自車車速。道路因子設(shè)定為:

式中:為標(biāo)準(zhǔn)的道路附著系數(shù);為實(shí)際道路的附著系數(shù)。
速度因子設(shè)定為:

式中:為后車的速度;為前車的速度。
2.2 主動(dòng)避障預(yù)警策略設(shè)計(jì)
主動(dòng)避障預(yù)警策略的關(guān)鍵是主動(dòng)避撞系統(tǒng)介入時(shí)刻的選擇。本文根據(jù)其在實(shí)際行車過程中的等效力與標(biāo)準(zhǔn)等效力進(jìn)行實(shí)時(shí)對(duì)比,實(shí)現(xiàn)主動(dòng)避撞系統(tǒng)介入時(shí)刻的選擇。根據(jù)多次仿真的結(jié)果,設(shè)置汽車產(chǎn)生等效力的作用范圍為3 s 時(shí)距,將在理想環(huán)境下后方汽車位于前方汽車的1.5 s時(shí)距等效力的值作為標(biāo)準(zhǔn)等效力的值。通過汽車實(shí)際行車過程中受到的等效力與標(biāo)準(zhǔn)等效力兩者進(jìn)行實(shí)時(shí)對(duì)比,進(jìn)行預(yù)警避撞。本文主動(dòng)避障策略如圖2 所示,將汽車受到的等效力大于標(biāo)準(zhǔn)模型受到的等效力時(shí)刻作為主動(dòng)避撞系統(tǒng)介入時(shí)刻,汽車開始制動(dòng)。
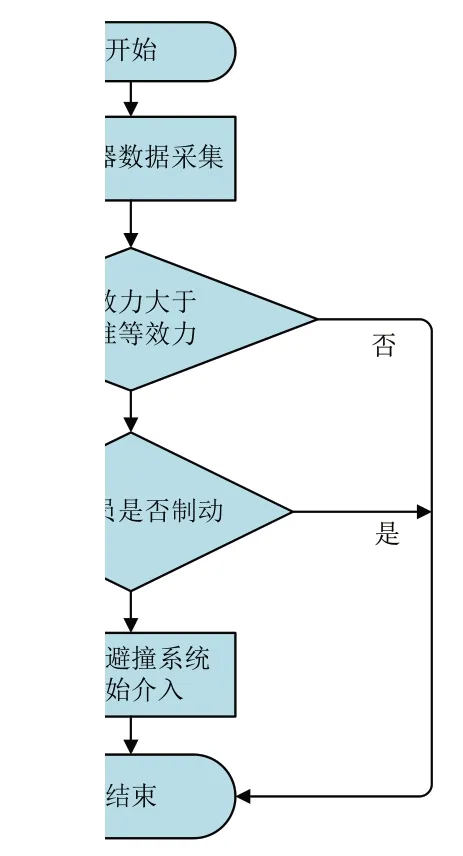
圖2 主動(dòng)避撞預(yù)警策略流程
3 仿真結(jié)果分析
3.1 仿真設(shè)備及其數(shù)據(jù)設(shè)置
針對(duì)本文的模型,采用Matlab2017 版和Car-Sim2017.1 版進(jìn)行仿真試驗(yàn),汽車i 的初始速度分別為100 km/h、80 km/h,汽車j 的速度為80 km/h、60 km/h,兩車開始相距100 m,仿真時(shí)間為35 s。本文仿真試驗(yàn)中,駕駛員均為未有制動(dòng)行為。
當(dāng)汽車i的初始速度為100 km/h;汽車j的速度為60 km/h時(shí),設(shè)置等效力標(biāo)準(zhǔn)模型,參數(shù)見表1。實(shí)際不同道路的行車等效力仿真參數(shù),見表2。實(shí)際不同駕駛員類型行車等效力仿真參數(shù),見表3。
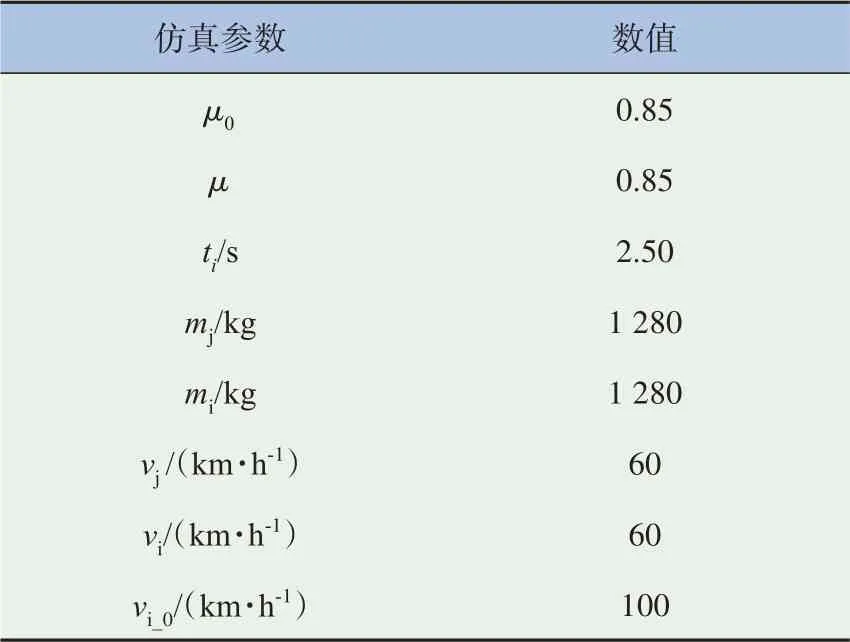
表1 vi_0=100 km/h時(shí),標(biāo)準(zhǔn)等效力模型參數(shù)
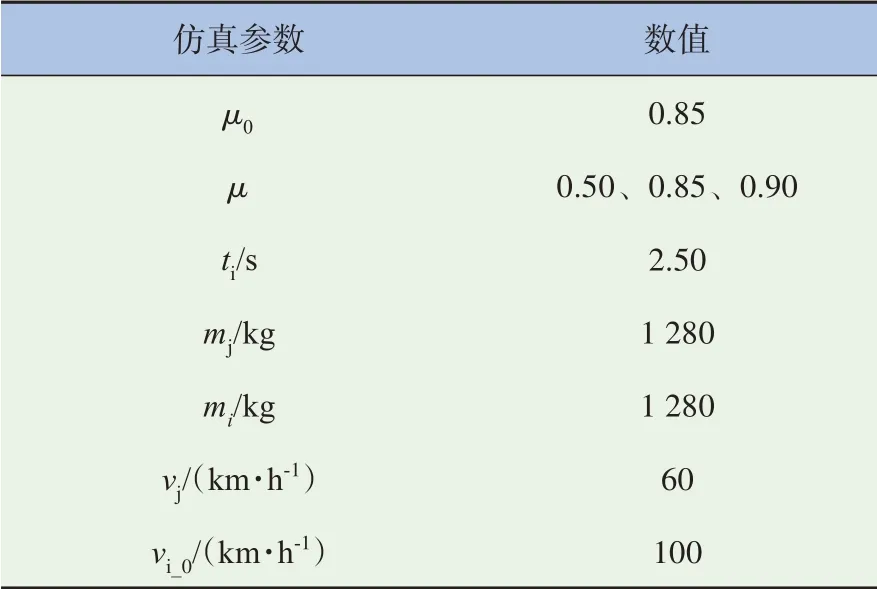
表2 實(shí)際不同道路行車等效力仿真參數(shù)
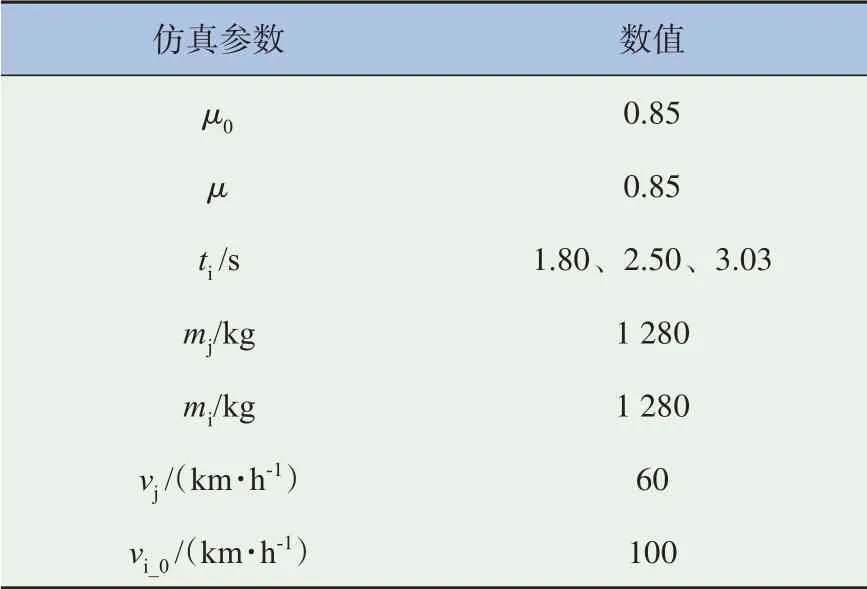
表3 不同駕駛員類型行車等效力仿真參數(shù)
3.2 仿真結(jié)果分析
實(shí)際地面附著系數(shù)分別為0.50、0.85、0.90時(shí),汽車i 的速度、兩車距離、開始制動(dòng)時(shí)間和最后兩車跟馳距離分別如圖3和表4所示。
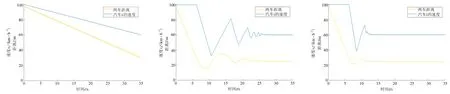
圖3 μ分別為0.50、0.85、0.90時(shí),汽車i的速度、兩車距離
在行車過程中,地面附著系數(shù)會(huì)影響汽車的制動(dòng)效果,地面附著系數(shù)越低,汽車制動(dòng)效果越差,制動(dòng)距離越大。由圖3 和表4 可知,當(dāng)?shù)孛娓街禂?shù)越低時(shí),汽車的主動(dòng)避撞系統(tǒng)介入時(shí)間越提前,并且兩車最后的跟馳距離越大。這一規(guī)律符合實(shí)際行車過程中的駕駛規(guī)律,地面條件不好的情況下,駕駛員會(huì)增加與前車的跟馳距離,以確保行車的安全。
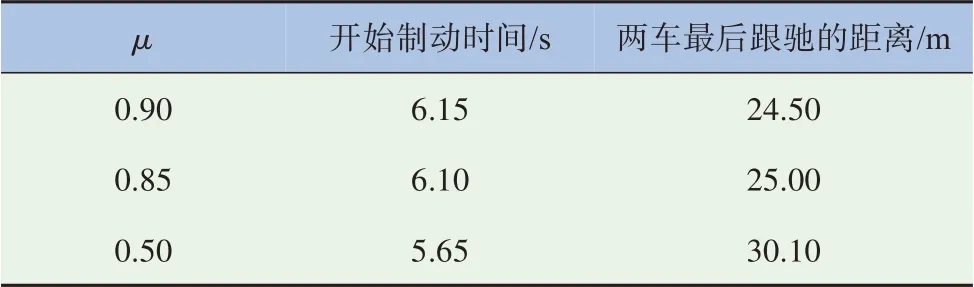
表4 不同μ值時(shí),汽車i的開始制動(dòng)時(shí)間和兩車最后跟馳距離
不同駕駛員特性時(shí)汽車i 的速度、兩車距離、開始制動(dòng)時(shí)間和最后兩車跟馳距離分別如圖4 和表5所示。
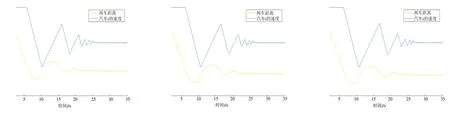
圖4 ti分別為1.80、2.50、3.03時(shí),汽車i的速度、兩車距離
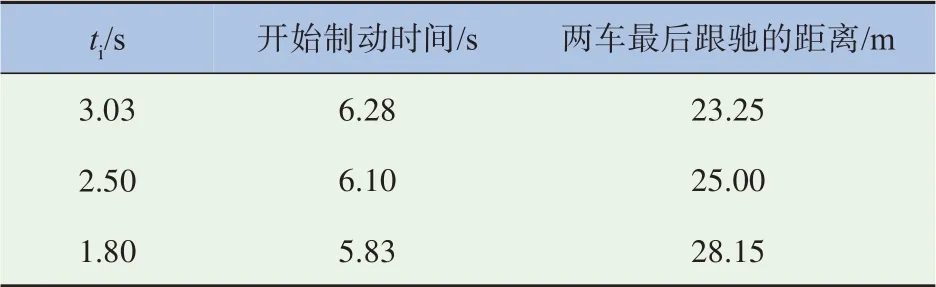
表5 不同ti值時(shí),汽車i的開始制動(dòng)時(shí)間和兩車最后跟馳距離
在行車過程中,駕駛員越激進(jìn),兩車的跟馳距離越小,駕駛員的制動(dòng)行為越滯后,越可能導(dǎo)致追尾。由圖4 和表5 可知,當(dāng)駕駛員越激進(jìn),主動(dòng)避撞系統(tǒng)介入時(shí)間越提前,且兩車保持的跟馳距離越大,以保證兩車的安全。
當(dāng)汽車i 的初始速度為80 km/h;汽車j 的速度為60 km/h時(shí),仿真參數(shù)見表6。
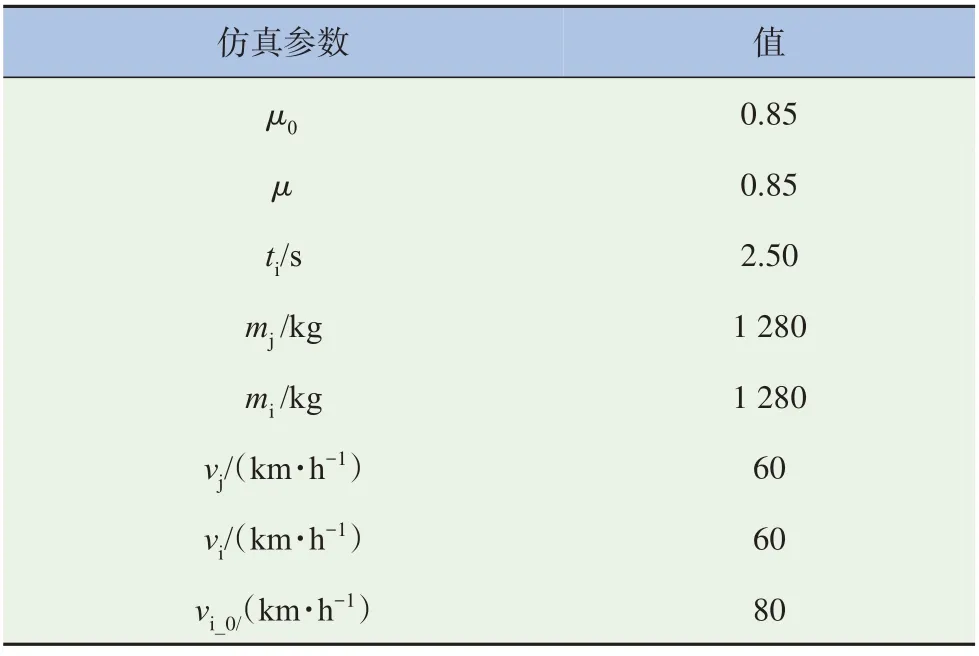
表6 vi_0=80 km/h時(shí),標(biāo)準(zhǔn)等效力模型參數(shù)
其仿真結(jié)果如圖4和表7所示。
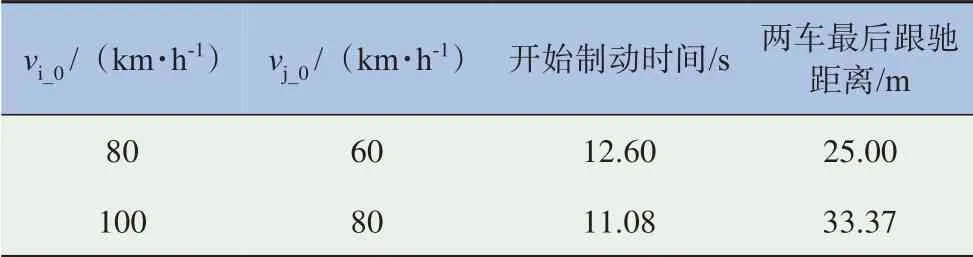
表7 vi_0=80 km/h、100 km/h時(shí),汽車i的開始制動(dòng)時(shí)間和兩車最后跟馳距離
在實(shí)際行車過程中,若后方汽車的速度越小,兩車所到達(dá)危險(xiǎn)距離的時(shí)間越長(zhǎng),則主動(dòng)避撞的介入時(shí)間越滯后。由圖3、圖5 和表4、表7 可知,當(dāng)汽車i 的初始速度越大時(shí),主動(dòng)避撞系統(tǒng)介入時(shí)間越提前,這也符合實(shí)際行車駕駛的規(guī)律。
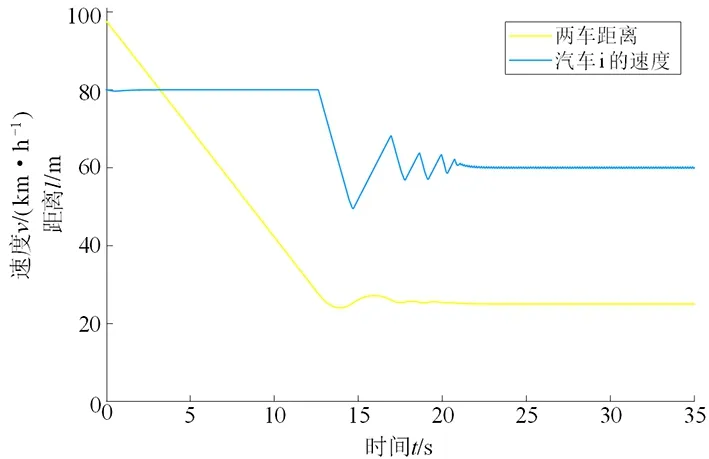
圖5 vi_0=80 km/h時(shí),汽車i的速度、兩車距離
當(dāng)汽車i的初始速度為100 km/h;汽車j的速度為80 km/h時(shí),仿真參數(shù)見表8。
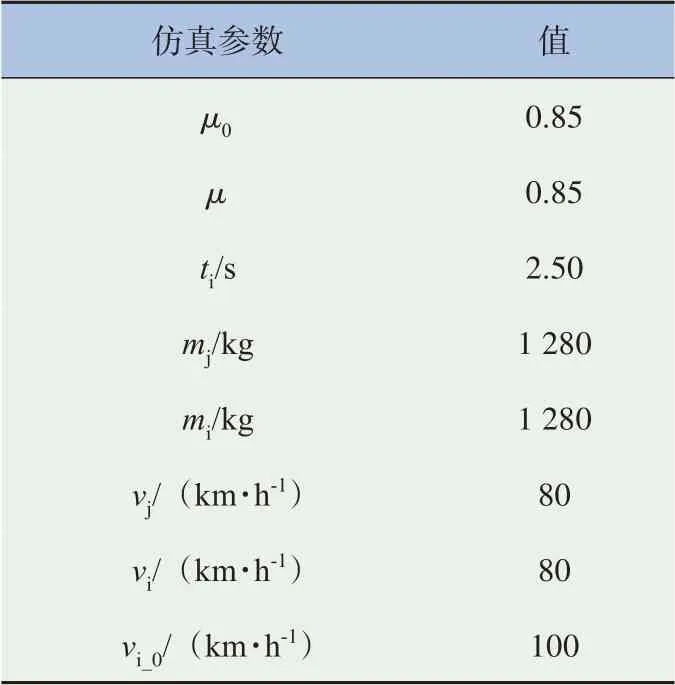
表8 vj_0=80 km/h時(shí),標(biāo)準(zhǔn)等效力模型參數(shù)
其仿真結(jié)果如圖6和表7所示。
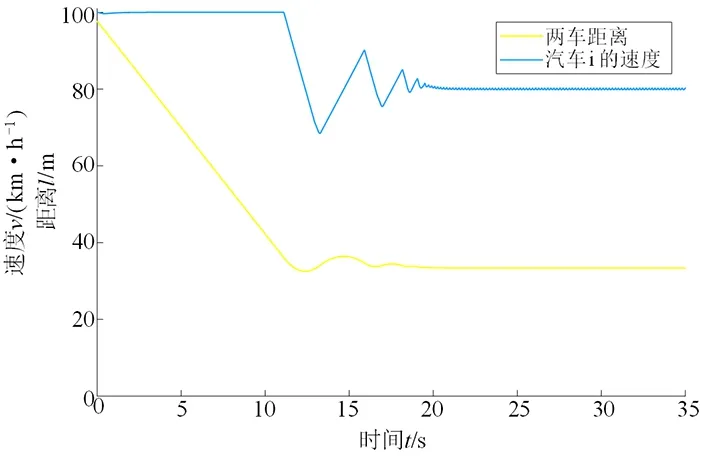
圖6 vj=80 km/h時(shí),汽車i的速度、兩車距離
由圖5~6 和表7 可知,當(dāng)兩車的相對(duì)速度一致時(shí),由于前車的速度越大其產(chǎn)生等效力的作用范圍越大,且當(dāng)汽車的速度越大時(shí),汽車的動(dòng)能越大。若汽車發(fā)生碰撞的嚴(yán)重程度越大,就會(huì)使兩車的跟馳距離變大。這符合實(shí)際行車過程中駕駛員的駕駛習(xí)慣。
4 結(jié)論
(1)針對(duì)行車的復(fù)雜過程,本文提出地面附著系數(shù)、駕駛員激進(jìn)程度、汽車速度3 個(gè)主要的影響因素,以等效力理論為基礎(chǔ)建立了一個(gè)新的汽車主動(dòng)避撞模型。
(2)經(jīng)仿真表明,該模型在不同的行車環(huán)境下均可保證汽車主動(dòng)避撞效果且可根據(jù)行車環(huán)境決定汽車最后的跟馳距離。該模型簡(jiǎn)單且能保證行車環(huán)境不同時(shí)的汽車主動(dòng)避撞效果。
(3)本文主要考慮影響行車安全的3 個(gè)因素,未來可考慮更多因素,如:能見度、道路曲率、汽車類型等,以增強(qiáng)模型在實(shí)際行車過程的主動(dòng)避撞效果。
猜你喜歡
社會(huì)科學(xué)戰(zhàn)線(2022年6期)2022-08-25 09:29:00
汽車實(shí)用技術(shù)(2022年14期)2022-07-30 06:13:42
汽車實(shí)用技術(shù)(2022年4期)2022-03-07 06:07:20
中財(cái)法律評(píng)論(2019年0期)2019-05-21 02:57:00
兒童時(shí)代·快樂苗苗(2017年7期)2018-01-24 18:28:45
中財(cái)法律評(píng)論(2016年0期)2016-06-01 12:17:10
公民與法治(2016年4期)2016-05-17 04:09:26
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
華北電力大學(xué)學(xué)報(bào)(社會(huì)科學(xué)版)(2014年4期)2014-02-27 13:40:05