車輛起步加速駕駛性客觀評價及優(yōu)化
2022-02-20 13:49:58朱翔宇
汽車工程學(xué)報 2022年1期
朱翔宇
(上海汽車集團(tuán)股份有限公司,上海201804)
隨著國內(nèi)汽車工業(yè)水平的逐年提高,車輛動態(tài)性能正逐漸成為評價一輛車好壞的關(guān)鍵標(biāo)準(zhǔn)。車輛動態(tài)性能從加速度方向來看,主要包括駕駛性、操控性和乘坐舒適性。其中,駕駛性特指車輛前進(jìn)方向的加速度及其變化情況的評價。一輛駕駛性好的車讓人感覺柔中帶剛,車隨心動,具備駕馭樂趣。車輛駕駛性能的開發(fā)需要結(jié)合駕駛員駕駛行為分析其具體需求,結(jié)合客觀評價的指標(biāo),并針對控制策略進(jìn)行適應(yīng)性設(shè)計,以達(dá)到性能優(yōu)化的目的。起步加速工況作為客戶最常用的評價駕駛性的工況,是駕駛性開發(fā)中最重要的工況之一,一定程度上反映了車輛駕駛性的開發(fā)水平。
1 駕駛行為分析
傳統(tǒng)的車輛性能開發(fā)主要針對車輛性能的最大能力,包括起步加速能力、超車加速能力和最高車速等。這種評價方法與日常駕駛員的駕駛行為存在巨大差異。能耗排放測試法規(guī)中已經(jīng)針對實(shí)際客戶使用環(huán)境進(jìn)行了深度的優(yōu)化,駕駛性開發(fā)也應(yīng)該結(jié)合實(shí)際客戶的行駛工況和駕駛行為制定對應(yīng)的工況并進(jìn)行適應(yīng)性優(yōu)化。
本文主要針對售后量產(chǎn)大數(shù)據(jù)統(tǒng)計分布以及特定駕駛風(fēng)格駕駛員行駛樣本的微觀數(shù)據(jù)進(jìn)行統(tǒng)計分析,獲得代表實(shí)際客戶行駛習(xí)慣的起步加速工況特征。
1.1 常用駕駛行為分布
根據(jù)某車型月均里程較多的700 臺量產(chǎn)車后臺數(shù)據(jù)進(jìn)行統(tǒng)計分析,獲得常用的駕駛行為分布。
1.1.1 車速加速度分布
根據(jù)量產(chǎn)統(tǒng)計樣本大數(shù)據(jù)繪制的速度-加速度分布,如圖1 所示。其中,車速區(qū)間位于0~120 km/h 范圍內(nèi),低車速分布的比例高于高速行駛比例。車輛加速度分布在±3 m/s范圍內(nèi)。其中,在高速110 km/h附近有小規(guī)模的聚集分布,其余車速區(qū)間加速度范圍隨車速增加呈現(xiàn)遞減趨勢。
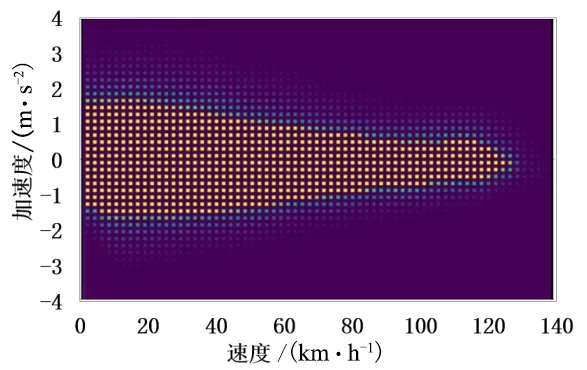
圖1 量產(chǎn)車速度-加速度分布
1.1.2 車速油門分布
車速和油門的對應(yīng)關(guān)系表征了不同車速下駕駛員的行為習(xí)慣,對駕駛性的工況建立具有具體的指導(dǎo)意義。如圖2 所示,隨油門開度增加車速范圍呈現(xiàn)逐漸增大趨勢,超過90%的工況點(diǎn)分布在30%油門以下,對于起步工況對應(yīng)的0 km/h 車速附近區(qū)域,更是絕大部分油門開度低于20%,這與傳統(tǒng)汽車開發(fā)中關(guān)注的全油門加速有很大差異。車輛使用行為更多的是以到達(dá)目的地為目標(biāo),極少出現(xiàn)全負(fù)荷狀態(tài)。

圖2 量產(chǎn)車油門開度-速度分布
1.2 起步加速特征工況提取
分析總體統(tǒng)計數(shù)據(jù)的同時,也需要關(guān)注不同駕駛員的駕駛細(xì)節(jié)。在針對20 位駕駛員特定路線的駕駛行為測試中發(fā)現(xiàn),起步行為可以歸類為兩種類型。一種對應(yīng)較為溫柔的駕駛風(fēng)格,常用油門在20%左右,駕駛車輛從0 km/h車速起步后以固定油門開度的方式加速,車輛加速度保持在1.5 m/s以下,并隨車速的增加逐漸降低。另一種駕駛員體現(xiàn)出較為激進(jìn)的駕駛風(fēng)格,常用油門開度為30%~40%,隨車速增加油門開度逐漸增大,駕駛預(yù)期為恒定加速度加速,加速度大小在2.5~3 m/s之間,如圖3所示。
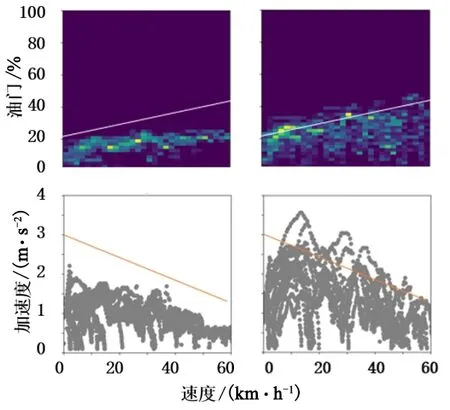
圖3 駕駛員常用起步油門開度和加速度
對起步加速過程的油門變化情況進(jìn)行特征分析,可以認(rèn)為是介于定油門起步和定加速度起步之間的狀態(tài),對應(yīng)控制模型分別為階躍輸入響應(yīng)和斜坡輸入響應(yīng)。
1.2.1 階躍輸入響應(yīng)
階躍響應(yīng)是在非常短的時間之內(nèi),一般系統(tǒng)的輸出在輸入量從0 跳變?yōu)? 時的響應(yīng)表現(xiàn)。車輛駕駛性對應(yīng)階躍響應(yīng)的操作是定油門起步加速。參照常用駕駛員操作習(xí)慣,最關(guān)心工況為20%~30%油門的定油門起步加速響應(yīng)。非常短的時間定義為油門變化率超過100%/s。
1.2.2 斜坡輸入響應(yīng)
斜坡響應(yīng)定義為一個輸入量的變化斜率從0 躍增到某有限值引起的時間響應(yīng)。對應(yīng)實(shí)車操作工況為定加速度起步加速(峰值1~2 m/s),或近似認(rèn)為以變油門起步加速,油門變化率30%~100%/s。
1.2.3 實(shí)際駕駛行為
實(shí)際的起步加速行為通常位于以上兩種情況之間,呈現(xiàn)初段油門增加速率較快,達(dá)到加速度峰值后又逐漸下降達(dá)到穩(wěn)定行駛條件的行為。通常對于駕駛員感受的評價可以通過對油門操作的頻繁程度來判別,較少的油門調(diào)整可以認(rèn)為系統(tǒng)具有較高的穩(wěn)定性和準(zhǔn)確性,從而能夠更快響應(yīng)駕駛員的加速度訴求,同時減少不平順的發(fā)生。而過大的加速度設(shè)置會導(dǎo)致超出預(yù)期的加速度峰值,對應(yīng)峰值后迅速的油門降低。如果動力迅速下降還需要進(jìn)一步補(bǔ)充油門,就造成了起步過程的加速度振蕩。
2 駕駛性評價維度定義
根據(jù)定油門起步加速過程的加速度特征分析,加速度隨車速的增加呈現(xiàn)先快速增加再緩慢收斂的趨勢。以峰值加速度點(diǎn)為界,可將起步加速過程分為加速度建立過程和收斂過程兩個區(qū)間,如圖4 所示。對應(yīng)不同的區(qū)間可以分別制定不同類型的駕駛性評價指標(biāo)。
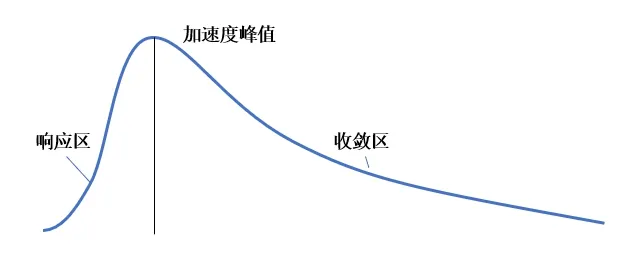
圖4 起步加速過程的分段
2.1 響應(yīng)性指標(biāo)
響應(yīng)性指標(biāo)主要在響應(yīng)區(qū)域定義,包括初段響應(yīng)和整體響應(yīng)。目標(biāo)可以通過油門變化后單位時間內(nèi)獲得的車速增加或達(dá)到固定加速度的時間來定義。對于起步加速響應(yīng)和Tip-in 加速響應(yīng),都可以定義從施加油門到95%峰值加速度的時間為響應(yīng)時間t_acc_95peak,定義從施加油門到0.49 m/s(0.05 g)加速度為響應(yīng)延遲時間t_acc_005g。
2.2 平順性指標(biāo)
平順性指標(biāo)主要通過加速度的變化來定義,主要有3 種方式。其一是監(jiān)測加速度的變化率,也就是加加速度jerk,如果這個指標(biāo)大于某一數(shù)值,會獲得沖擊感。其二是通過加速度梯度方向的變化來觀測振蕩,作為不平順的表現(xiàn)來定義。其三是從整體的維度,分別從響應(yīng)段和收斂段,通過計算實(shí)際加速度的1 Hz低通濾波,獲得理想加速度形態(tài),再與實(shí)際加速度進(jìn)行比較,其差值的累積作為不平順的表征,命名為diff_acc,其中響應(yīng)段命名為diff_acc_launch,收斂段命名為diff_acc_stable。
2.3 收斂性指標(biāo)
收斂性指標(biāo)通過收斂段的加速度隨車速的降低程度來表征,主要分為兩方面指標(biāo)。其一是擋位間加速度比較,表現(xiàn)為高擋位加速度應(yīng)該比低擋位具有更低的加速度數(shù)值。其二是在擋過程中,加速度至少要呈現(xiàn)不增加的趨勢。整體上可以以加速度隨車速變化的線性擬合值作為收斂段收斂程度的描述。在擋過程中的額加速度收斂指標(biāo)定義為_acc_in_gear,各擋位間的收斂指標(biāo)為_acc_between_gear。通常作為收斂性的指標(biāo)要求,值應(yīng)為負(fù)值。
由于大部分車型加速度呈現(xiàn)與車速的對數(shù)成反比的趨勢,所以也可以將滿足這種趨勢的程度定義為收斂性指標(biāo),即加速度與車速對數(shù)的相關(guān)性,定義為r2_acc_logVehSpd。
3 競品駕駛性表現(xiàn)及風(fēng)格設(shè)計
對于以上所述的駕駛性指標(biāo)定義,對大量競爭車型進(jìn)行了測試并獲得了不同指標(biāo)的表現(xiàn)分布。以某性能表現(xiàn)優(yōu)異的車型為例,通過與某在開發(fā)車型的比較可以看出,定義的駕駛性指標(biāo)在分?jǐn)?shù)的分布上確實(shí)存在顯著差異。
3.1 響應(yīng)性指標(biāo)
以30%油門初段起步響應(yīng)指標(biāo)t_acc_005g 為例,在響應(yīng)時間0.15~0.4 s 區(qū)間內(nèi)基本上呈線性分布,可以認(rèn)為對應(yīng)主觀評分6~8 分。極優(yōu)秀的車響應(yīng)時間可以達(dá)到0.1 s以下,如圖5所示。
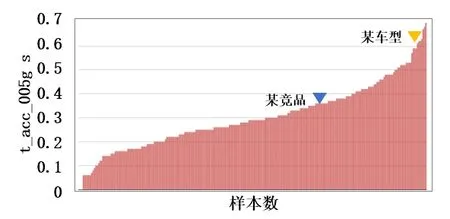
圖5 初段響應(yīng)指標(biāo)值分布
而95%峰值響應(yīng)時間則差異較大,80%比例的車型響應(yīng)時間在1.5 s以下,極個別響應(yīng)時間較長的車輛可以超過3 s,由圖6可知,某在開發(fā)車型現(xiàn)狀與競品存在比較明顯的差異。
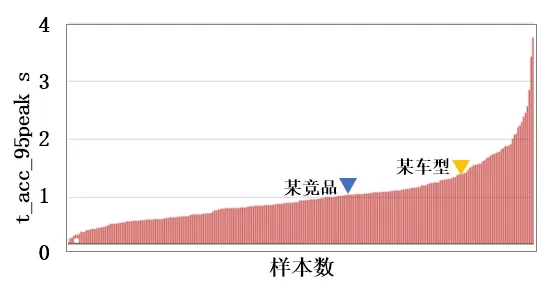
圖6 95%峰值響應(yīng)指標(biāo)值分布
3.2 平順性指標(biāo)
宏觀平順性評價指標(biāo)diff_acc_launch 與diff_acc_stable在數(shù)據(jù)分布上10%~80%分位呈現(xiàn)比較線性的分布,與主觀評估值匹配也較好,某車型與競品的參數(shù)分布情況如圖7~8 所示,也存在改進(jìn)的空間。
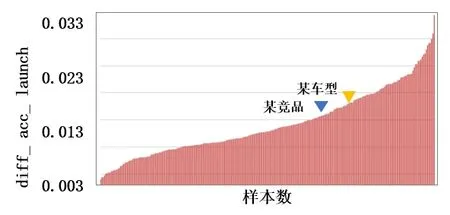
圖7 起步平順性指標(biāo)值分布
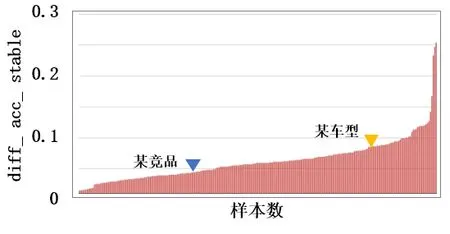
圖8 收斂段平順性指標(biāo)值分布
3.3 收斂性指標(biāo)
以r2_acc_logVehSpd 為例,如圖9 所示,數(shù)據(jù)分布差異較小,絕大部分車型可以達(dá)到負(fù)相關(guān)度95%以上,也意味著收斂性對于駕駛性開發(fā)是比較容易實(shí)現(xiàn)的一個維度。即便如此,1%的差異仍然能夠帶來可感知的駕駛性差異。針對加速度形態(tài)的優(yōu)化仍然很有必要。
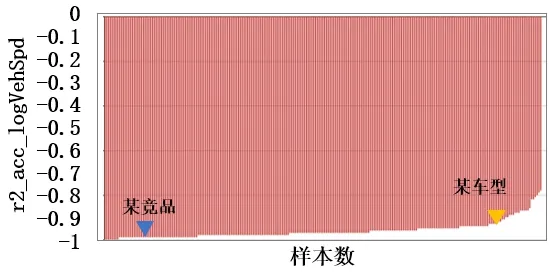
圖9 加速度車速對數(shù)相關(guān)性指標(biāo)值分布
3.4 駕駛性風(fēng)格
針對駕駛性風(fēng)格的評價是一個復(fù)雜而綜合的過程。本文設(shè)計一種加速度梯度圖像(圖10),用以表征不同車輛的加速度風(fēng)格。數(shù)據(jù)來源于定油門加速所獲取的加速度-速度數(shù)據(jù)。按同車速下相鄰油門的加速度值梯度進(jìn)行染色,顏色越深代表隨油門增大方向加速度梯度越大。整體顏色越深代表車輛加速度增益能力越強(qiáng),整體顏色越均勻代表平順性和線性越好。此圖的顏色分布比較直觀地表征了車輛駕駛型風(fēng)格以及動力總成類型。
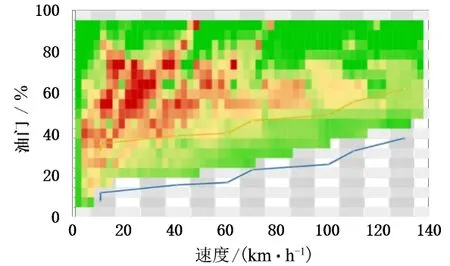
圖10 加速度梯度分布
4 理想駕駛性曲面設(shè)計
4.1 主要控制參數(shù)介紹
為了控制駕駛性風(fēng)格的統(tǒng)一和可設(shè)計性,本文嘗試通過若干關(guān)鍵參數(shù)的定義,來確定唯一的目標(biāo)加速度響應(yīng)曲面。針對該曲面設(shè)計的關(guān)鍵控制曲線如下。
4.1.1 起步峰值曲線
不同油門開度下起步的峰值加速度隨油門變化的關(guān)系(圖11),決定起步的線性度、起步加速風(fēng)格等感受。
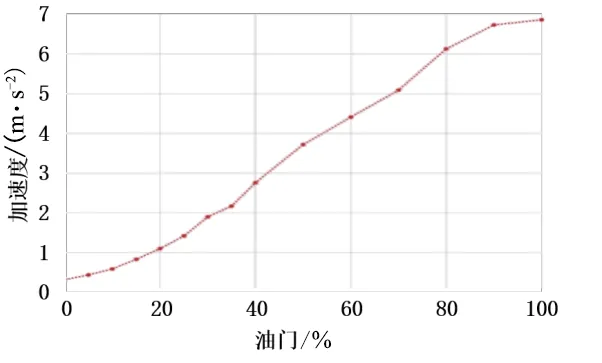
圖11 最大起步峰值曲線
4.1.2 最大加速度曲線
通過傳動系統(tǒng)參數(shù)和驅(qū)動系統(tǒng)的最大能力,能夠計算出全油門狀態(tài)下加速度隨車速變化的曲線(圖12),作為加速響應(yīng)曲面的油門維度邊界,控制加速度范圍。
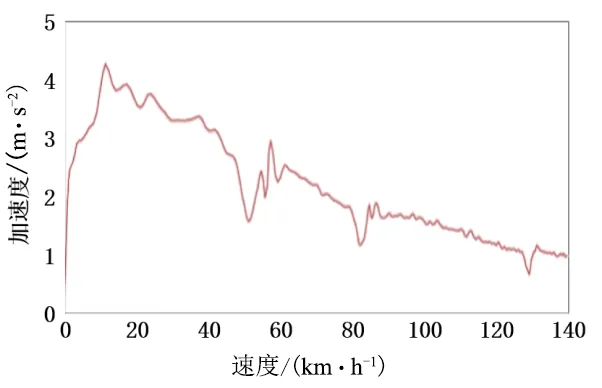
圖12 最大加速度曲線
4.1.3 等速控制線
不同車速下都有唯一的油門開度與等速行駛對應(yīng),油門-速度關(guān)系線定義了加速響應(yīng)曲面中加速度正負(fù)的邊界。在等速控制線附近,應(yīng)避免在油門調(diào)整較小的情況下出現(xiàn)大幅度的加速度變化,以提高勻速行駛的穩(wěn)定性。等速控制線如圖13所示。
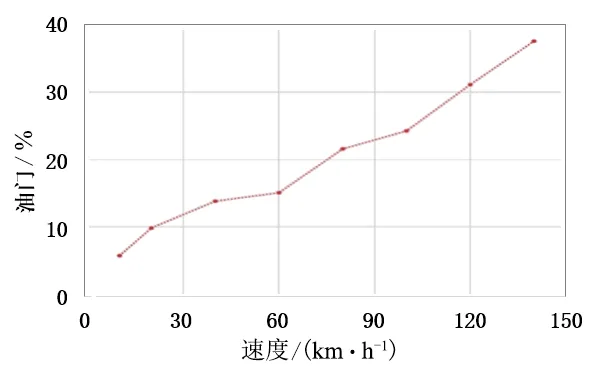
圖13 等速控制線
4.1.4 加速度梯度
以上3 個參數(shù)分別定義了加速過程中的車速、加速度和油門的3 個邊界,加速度梯度曲線定義的是在等速行駛的基礎(chǔ)上,增加的油門與增加的加速度之間的對應(yīng)關(guān)系。為了實(shí)現(xiàn)加速過程的線性和曲面的平滑,應(yīng)保證不同車速下的加速度梯度連續(xù)變化,在油門維度加速度的變化應(yīng)呈現(xiàn)一個穩(wěn)定的趨勢,直到達(dá)到車輛的極限動力能力。在等車速上增加固定油門的加速度梯度值相對于車速的曲線叫做系統(tǒng)增益曲線,如圖14所示。
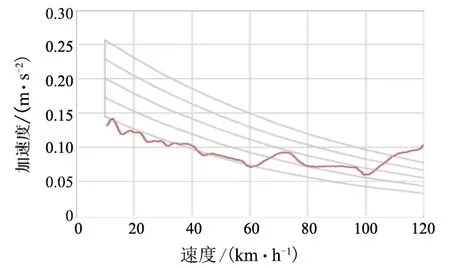
圖14 系統(tǒng)增益曲線
4.2 擬合曲線
4.2.1 加速度梯度曲線
貝塞爾曲線于1962 年由法國工程師皮埃爾·貝塞爾發(fā)明,它是依據(jù)4 個位置任意的點(diǎn)坐標(biāo)來繪制一條光滑曲線,為計算機(jī)矢量圖形學(xué)奠定了基礎(chǔ)。使用這種曲線只需要很少的控制點(diǎn)就能夠生成復(fù)雜平滑曲線,廣泛用于輔助汽車車體的工業(yè)設(shè)計。
階貝塞爾曲線公式:
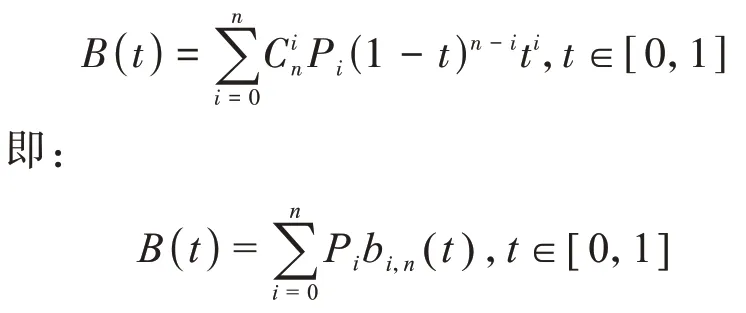
其中b() 的值為
b() = C(1 -) t,其中=0,1,…,。
利用貝塞爾曲線的形態(tài)特性來實(shí)現(xiàn)加速響應(yīng)曲面的平滑過渡。
4.2.2 起步形態(tài)曲線
在起步形態(tài)的設(shè)計中,關(guān)注的是加速度隨時間的平順性。關(guān)鍵控制指標(biāo)為0.49 m/s(0.05 g)響應(yīng)時間,95%峰值加速度響應(yīng)時間,以及峰值加速度數(shù)值。其間的加速度建立過程可以使用貝塞爾曲線擬合來設(shè)計目標(biāo),如圖15 所示。在DCT 變速器車型的控制策略中,可以通過離合器傳扭的控制,最大程度地擬合理想加速度曲線,來獲得響應(yīng)和平順性最優(yōu)的加速度形態(tài)。
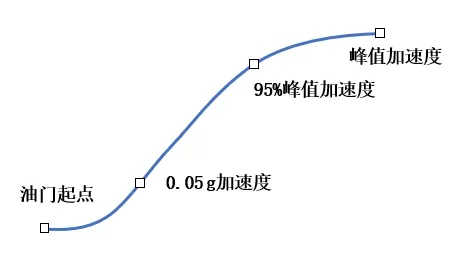
圖15 起步形態(tài)曲線
4.2.3 加速度收斂曲線
通常在加速度峰值到來之后,相同油門開度的加速度會隨車速增加而降低,最終達(dá)到一個穩(wěn)定的車速勻速行駛。需要構(gòu)造一個時域函數(shù)來描述這種收斂趨勢。最初準(zhǔn)備用一種指數(shù)函數(shù)來描述這種衰減趨勢,但在實(shí)際車輛數(shù)據(jù)上擬合得并不完善。最終通過競爭車數(shù)據(jù)的比對,發(fā)現(xiàn)理想加速度收斂趨勢是與車速的對數(shù)成線性反比關(guān)系。傳統(tǒng)駕駛性較優(yōu)的車型通常符合這種趨勢。因此,假設(shè)r2_acc_logVehSpd =-1 作為理想情況來設(shè)計加速度曲線收斂性。
4.3 加速度響應(yīng)曲面
加速響應(yīng)曲面是描述加速度-油門開度-車速關(guān)系的圖形,理想加速響應(yīng)曲面可以基本定義車輛駕駛性風(fēng)格形態(tài)。實(shí)際加速度曲線與理想加速度曲線的而差異可以認(rèn)為是駕駛平順性的一個評價維度。
4.3.1 響應(yīng)曲面形態(tài)
由以上的曲線形態(tài)構(gòu)建出的理想加速曲線如下:具有平滑、線性等特征,并且可以滿足定義的風(fēng)格及駕駛性目標(biāo)。不同油門下的理想加速度曲線連成的曲面稱為加速度響應(yīng)曲面,如圖16所示。
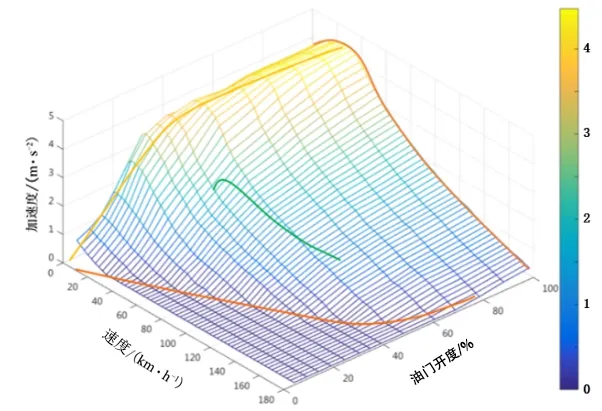
圖16 加速度響應(yīng)曲面
4.3.1 加速度梯度形態(tài)
在某車速下的加速度梯度設(shè)計中,仍然希望整個曲面主體維持平滑線性過渡的特征。仍然假設(shè)加速度增大趨勢滿足貝塞爾曲線擬合,如圖17 所示,在擬合曲線上設(shè)計了6個關(guān)鍵控制點(diǎn)。其中,0%油門對應(yīng)的加速度值為0 m/s,100%油門對應(yīng)的加速度值應(yīng)達(dá)到該車速下的最大加速能力。等速點(diǎn)應(yīng)滿足該點(diǎn)穿過等車速油門-速度控制線,在等速點(diǎn)附近,應(yīng)存在等速控制點(diǎn),其油門開度略大于等速點(diǎn),但車速差異不大,以保證勻速行駛易控車速的性能。系統(tǒng)增益點(diǎn)的加速度值滿足系統(tǒng)增益線定義的加速度梯度,從等速控制點(diǎn)到系統(tǒng)增益點(diǎn),加速度隨油門增大應(yīng)保持線性增加的趨勢,直到達(dá)到最大加速度點(diǎn)附近,加速度增加趨勢趨于平緩,最終趨近100%油門點(diǎn)。某車速下系統(tǒng)增益值的大小決定了加速度梯度線隨油門增加的梯度。
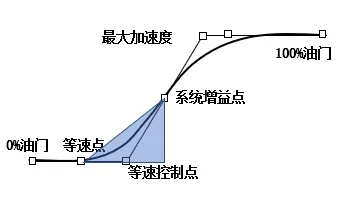
圖17 加速度梯度曲線
4.4 發(fā)動機(jī)轉(zhuǎn)矩形態(tài)設(shè)計
4.4.1 發(fā)動機(jī)轉(zhuǎn)矩傳遞模型
發(fā)動機(jī)轉(zhuǎn)矩控制分為等功率型、等轉(zhuǎn)矩型和軸扭型。如今AT 變速器車型通常按變速器輸出軸即輪端轉(zhuǎn)矩的風(fēng)格來進(jìn)行設(shè)計,以保證各擋位動力輸出的風(fēng)格一致性。而從變速器輸出軸轉(zhuǎn)矩到發(fā)動機(jī)油門需求轉(zhuǎn)矩的控制過程,中間需考慮轉(zhuǎn)矩的損失和衰減,其中包括變速器的速比和效率、液力變矩器系數(shù)、飛輪慣量損失、發(fā)動機(jī)瞬態(tài)衰減等。通過一系列算法反推的發(fā)動機(jī)目標(biāo)轉(zhuǎn)矩可以保證輸出軸轉(zhuǎn)矩的一致性。
從加速度響應(yīng)曲面出發(fā),結(jié)合特定的換擋策略,能夠根據(jù)傳動關(guān)系及效率慣量損失,確定發(fā)動機(jī)轉(zhuǎn)矩控制圖譜(PedalMap),從而實(shí)現(xiàn)了從駕駛性風(fēng)格及性能目標(biāo)到控制變量參數(shù)的正向設(shè)計。
4.4.2 分擋位轉(zhuǎn)矩銜接設(shè)計
基于多擋位PedalMap 模型的自動變速器車型轉(zhuǎn)矩設(shè)計中,可以針對各個擋位的動力需求進(jìn)行設(shè)計。理論上可以通過PedalMap 以及局部轉(zhuǎn)矩調(diào)節(jié)的控制,在發(fā)動機(jī)能力足夠的情況下,獲得無感的換擋體驗。以變速器升擋為例,如圖18 所示,在轉(zhuǎn)矩相中,離合器開始動作,實(shí)際速比已經(jīng)開始變化,如果轉(zhuǎn)矩維持不變,車輛加速度將呈現(xiàn)降低趨勢,此時應(yīng)該適當(dāng)補(bǔ)扭,以維持軸端的穩(wěn)定輸出。在速度相,發(fā)動機(jī)進(jìn)入調(diào)速環(huán)節(jié),由于發(fā)動機(jī)軸的慣量能量會釋放到輪端,此時如果轉(zhuǎn)矩不變會導(dǎo)致輸出軸上的動力沖擊,需要相應(yīng)地進(jìn)行降扭以維持輸出軸動力穩(wěn)定。速度相結(jié)束后,需要提升發(fā)動機(jī)轉(zhuǎn)矩至下一擋位PedalMap 狀態(tài),為實(shí)現(xiàn)換擋前后的動力接近,應(yīng)選用相近的功率以及更高的轉(zhuǎn)矩。
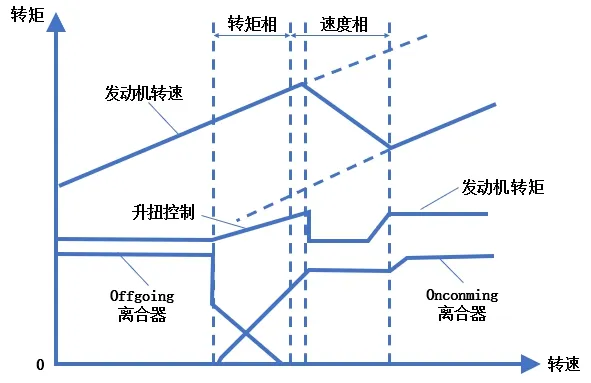
圖18 有動力升擋轉(zhuǎn)矩調(diào)節(jié)過程
5 數(shù)據(jù)實(shí)測對比
5.1 時域數(shù)據(jù)與目標(biāo)比較
經(jīng)過加速曲面的理論設(shè)計和實(shí)車優(yōu)化,可以看到加速度-速度曲線與設(shè)計值比較接近,在某些局部點(diǎn)由于傳動系統(tǒng)控制的能力,和競品以及目標(biāo)線相比仍然存在差異,如圖19所示。
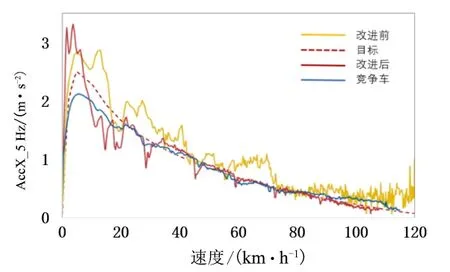
圖19 改進(jìn)前后加速度與目標(biāo)比較
5.2 加速駕駛性評價指標(biāo)比較
根據(jù)駕駛性正向設(shè)計方法及控制優(yōu)化得到的響應(yīng)曲線,可以計算對應(yīng)響應(yīng)性、平順性及收斂性的駕駛性關(guān)鍵指標(biāo)數(shù)值,見表1。由表1 可知,經(jīng)過駕駛性設(shè)計的優(yōu)化,大部分高感知指標(biāo)都得到了改善,與某競品的差異也大幅度縮小。
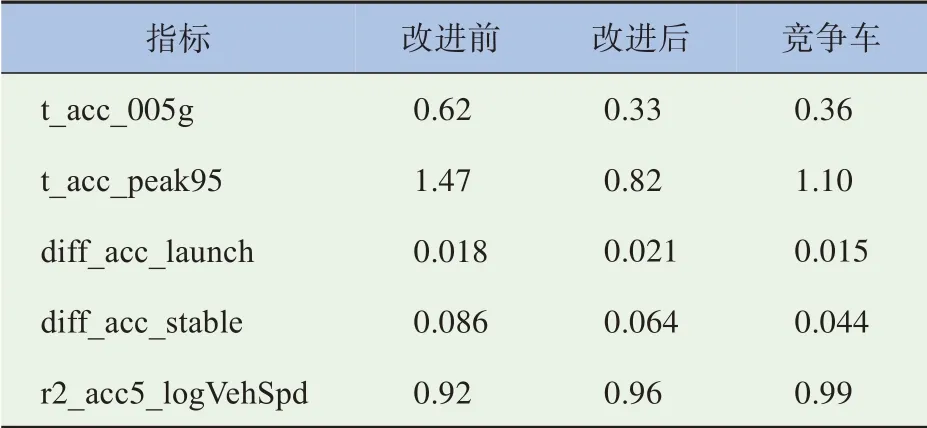
表1 改進(jìn)前后駕駛性指標(biāo)比較
6 結(jié)論
(1)從客戶需求出發(fā),構(gòu)建了起步加速過程的駕駛性客觀評價指標(biāo),從響應(yīng)性、平順性、收斂性和風(fēng)格等維度對駕駛性表現(xiàn)進(jìn)行了研究,獲得了駕駛性正向設(shè)計的開發(fā)需求。
(2)通過對競品的駕駛性測試和數(shù)據(jù)分析,完成了加速響應(yīng)曲面的正向設(shè)計,利用轉(zhuǎn)矩傳遞和跨擋位轉(zhuǎn)矩銜接模型,對整車駕駛性能進(jìn)行了優(yōu)化設(shè)計,顯著改善了駕駛體驗。
猜你喜歡
海峽姐妹(2020年9期)2021-01-04 01:35:44
VOGUE服飾與美容(2020年9期)2020-09-02 14:47:26
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
山東青年(2016年1期)2016-02-28 14:25:25
當(dāng)代修辭學(xué)(2014年3期)2014-01-21 02:30:44
公務(wù)員文萃(2013年5期)2013-03-11 16:08:37