基于狀態反饋解耦控制的含DFIG電力系統低頻振蕩抑制研究
2022-02-23 02:07:30于淼李京霖
可再生能源 2022年2期
于淼,李京霖
(1.北京建筑大學機電與車輛工程學院,北京 100044;2.北京市建筑安全監測工程技術研究中心,北京 100044;3.清華大學電力系統及發電設備安全控制和仿真國家重點實驗室,北京 100084)
0 引言
國內外學者對風電并網低頻振蕩進行了深入研究。文獻[1]提出一種均值方差映射算法進行控制器參數協調優化,可有效提高系統的區域阻尼并改善動態性能。文獻[2]建立了考慮鎖相環與虛擬慣量控制的雙饋風電機組并網互聯系統小干擾模型,采用解析方法從機理上分析鎖相環與虛擬慣量共同作用下系統的小干擾穩定性。文獻[3]提出了基于離散線性二次調節器(LQR)和基于卡爾曼濾波的狀態估計的廣域阻尼控制(WADC)方法,應用于區域間實時阻尼風力綜合電網振蕩,該算法可有效衰減區域間模態。文獻[4]針對系統模型辨識誤差因素進行了模型建模和阻尼控制器設計,基于遞推最小二乘法與Vinnicombe距離理論,提出一種迭代辨識方法的阻尼控制器設計,能有效地抑制風電接入系統的低頻振蕩。文獻[5]使用中心頻率法、測試信號法,設計了電力系統穩定器(PSS)和附加直流功率調制器(DCM)。文獻[6]對DFIG靜態同步補償器-靜態同步串聯補償器(STATCOM-SSSC)和轉子側變換器進行協調設計,使得轉子側變換器(RSC)通過開關控制DFIG有功功率和無功功率。文獻[7]利用功率振蕩阻尼聯合可控性和可觀測性的最大概率值,確定WADC下電力在任意工作點的最佳輸入和輸出,提出的自適應控制器很好地保持了風電系統預期的魯棒性和阻尼性能。文獻[8]針對典型風電電壓源型并網變流器提出一種頻率耦合阻抗模型,考慮互補頻率耦合效應和外環控制,進一步構建并網系統的整體阻抗模型。文獻[9]提出一種鯨魚優化算法(WOA),對目標函數進行改進來調整控制器的變量,采用模態可觀測性確定合適功率阻尼振蕩器輸入信號,從而在風電系統中獲得較好的低頻振蕩控制效果。文獻[10]提出一種在DFIG和弱電網之間阻尼控制策略,利用區域極點配置混合H2/H∞控制抑制低頻振蕩。
利用凸多面體的不同工作點作為凸多面體的頂點,確保在更大工作范圍內的適用性,使得系統允許保持良好的阻尼性能。在風機存在不確定性的情況下,可補償DFIG的無功功率,提高系統振蕩阻尼。文獻[11]提出在DFIG中配置電力系統穩定器(PSS),改善風電系統阻尼。文獻[12]提出一種基于矢量裕度法的風電并網電力系統低頻振蕩分析方法,該方法可以計算多臺DFIG同時接入電網時,各自對系統低頻振蕩模式的影響,并通過二維復平面圖示化分析使得結果更加清晰直觀。文獻[13]提出一種基于自抗擾控制器的廣域阻尼控制器協調優化策略,利用人工蜂群算法對自抗擾控制器和廣域阻尼控制器進行協調優化,以增強系統的穩定性。文獻[14]提出一種基于凸多面體的魯棒阻尼控制器,不僅能夠為系統次同步振蕩模式提供足夠的阻尼,而且風電功率在較大范圍內變化的情況下,控制器也具有較好的控制效果。文獻[15]提出了頻率阻尼控制方案,在轉子電流環中加入利用鎖相環獲得的頻率作為控制信號,明顯抑制弱電網DFIG低壓穿越期間的系統振蕩,提高系統阻尼比,改善了系統小信號穩定性。
上述研究沒有考慮DFIG接入電網引起電力系統角速度偏差變化、功角變化、阻抗變化以及三者之間的耦合作用對低頻振蕩的影響。因此,本文根據已有的閉環電力系統狀態空間模型,提出將DFIG視為一個單輸入雙輸出的反饋控制器,對其傳遞函數進行狀態反饋解耦控制,通過在DFIG中引入輸入變換陣F和狀態反饋陣K,使得反饋控制器傳遞函數陣變為非奇異對角矩陣,實現對同步發電機注入DFIG的變量的一對一控制。然后根據耦合系數與阻尼比之間的關系,通過改變阻尼比進而抑制低頻振蕩,保證電力系統穩定性。
1 系統模型
1.1 電力系統狀態空間模型
電力系統穩態運行時,DFIG向電力系統注入的有功功率和無功功率如圖1所示。
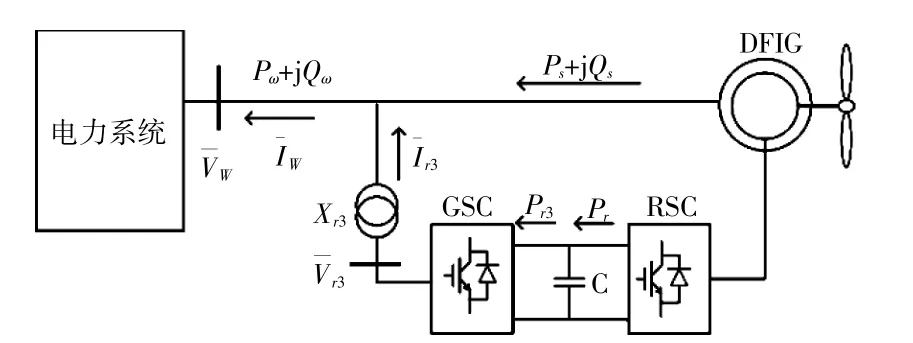
圖1 含DFIG的電力系統Fig.1 Power system with DFIG
圖中:Pω+j Qω=Pω0+j Qω0+ΔPω+jΔQω,其中ΔPω,ΔQω分別為DFIG注入電力系統之間的有功功率和無功功率變化。
選擇Pω和Qω作為DFIG到電力系統的控制信號,建立不含DFIG電力系統狀態空間模型[18]。
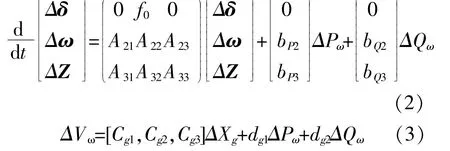
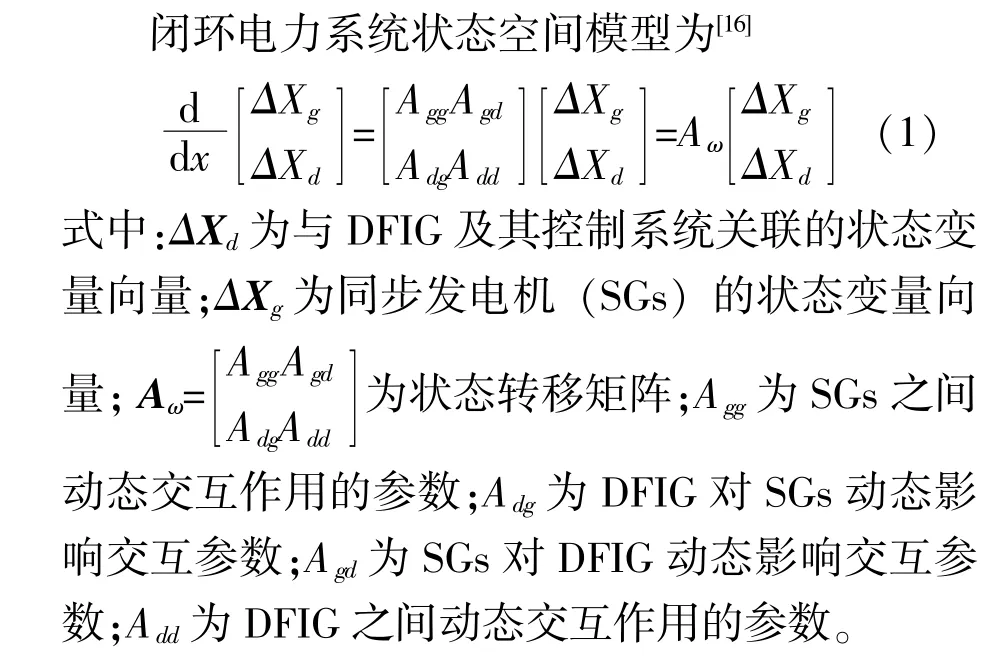
式中:Δδ,Δω分別為同步發電機功角、角速度的偏差矢量;ΔZ為從同步發電機到電力系統中其他狀態變量矢量;bP2,bP3,bQ2,bQ3分別為與有功功率和無功功率有關的控制向量;Cg1,Cg2,Cg3分別為功角、角速度和阻抗的耦合參數;dg1,dg2分別為有功功率和無功功率變化反饋參數;ΔVω為風電機公共連接點處的電壓幅值偏差。
1.2 含DFIG電力系統閉環模型
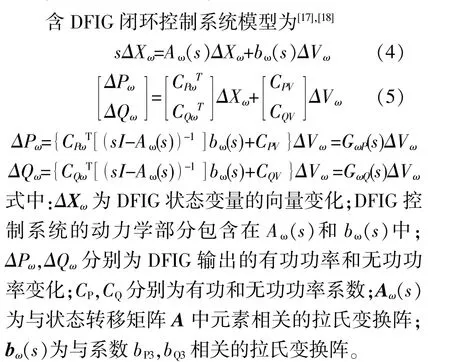
DFIG響應隨公共節點電壓ΔVω變化,在電力系統中,通常限制由ΔVω引起DFIG的動態響應。因此DFIG引入的動態交互作用將會受到限制。式(2),(4)共同構成含DFIG電力系統閉環控制模型,如圖2所示。
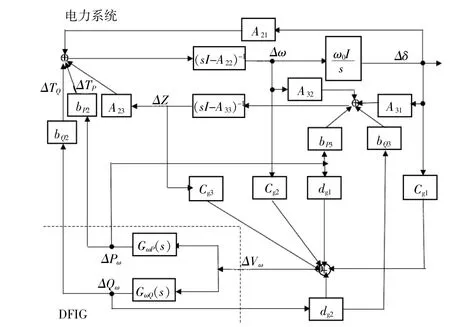
圖2 含DFIG電力系統閉環控制模型Fig.2 Closed-loop control model of power system with DFIG
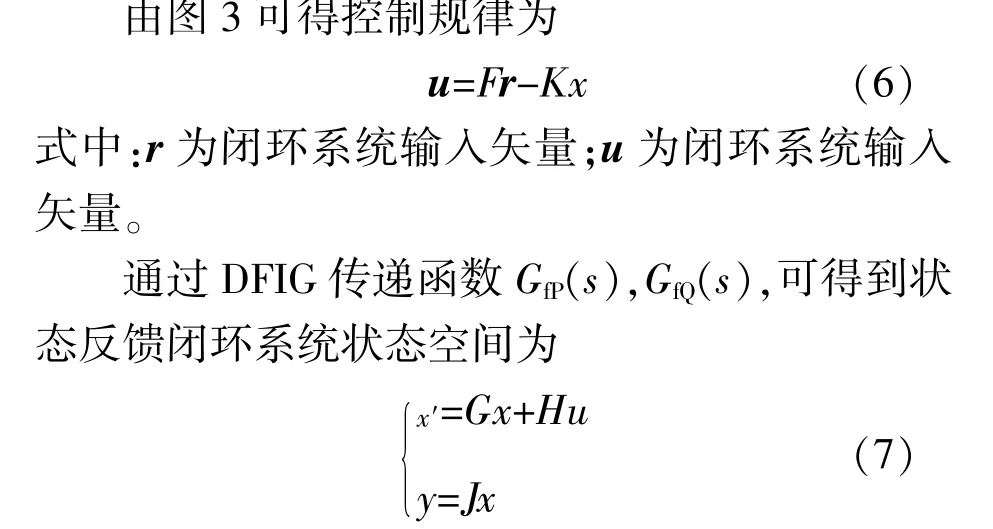
2 基于狀態反饋解耦方法
2.1 狀態反饋解耦
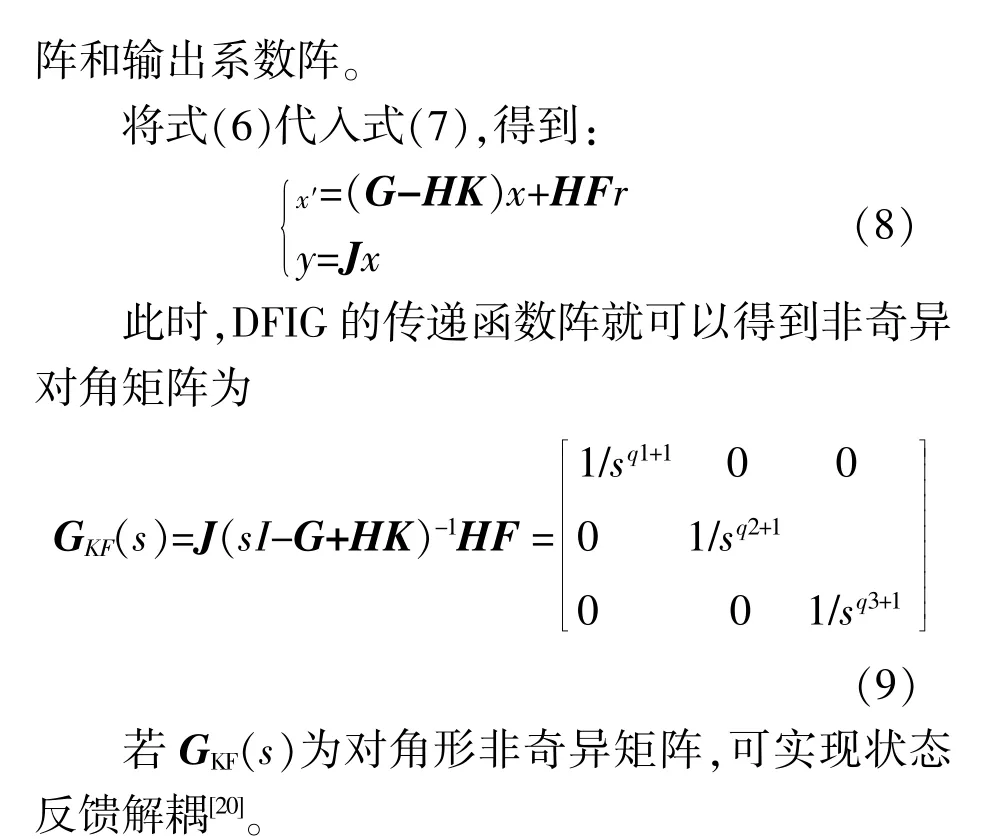
狀態反饋解耦可實現系統一對一控制,保證了各單入單出系統單獨運行,實現對解耦變量的單獨控制[24]。本文主要通過解耦方法對DFIG并網帶來的多變量耦合作用系統進行一對一控制,從而實現一個多入多出系統解耦的充要條件,即系統的傳遞函數矩陣能化為對角矩陣。
對角陣的轉換通常利用狀態反饋加輸入變換陣的結構形式,狀態反饋解耦控制的狀態空間結構如圖3所示。圖中:K為狀態反饋陣,為2×2階常數陣;F為2×2階輸入變換陣[19]。

圖3 狀態反饋解耦控制狀態空間結構圖Fig.3 State space structure diagram of state feedback decoupling control

2.2 DFIG對阻尼轉矩幅值的影響
電力系統產生的Δδ,Δω,ΔZ通過功角耦合參數Cg1、角速度耦合參數Cg2以及阻抗耦合參數Cg3耦合作用于PCC,它們會引起節點電壓的變化[18],PCC電壓幅值ΔVω的變化會引起DFIG輸出功率幅值變化,進而影響阻尼力矩幅值變化,即電力系統的輸入發生變化。在電力系統中,正常情況下ΔVω的動態變化是有限的,因此DFIG的動態響應也是有限的。
但是由于Δδ,Δω,ΔZ 3個偏差變量共同作用于PCC電壓,這使ΔVω受到1~3個變量的影響,任何一個偏差變量超出峰值,都可能引起ΔVω的動態變化超出限制[22],這就可能導致系統發生低頻振蕩,產生不利后果。由DFIG輸出功率可得到同步發電機機電振蕩回路貢獻的傳遞函數矩陣為
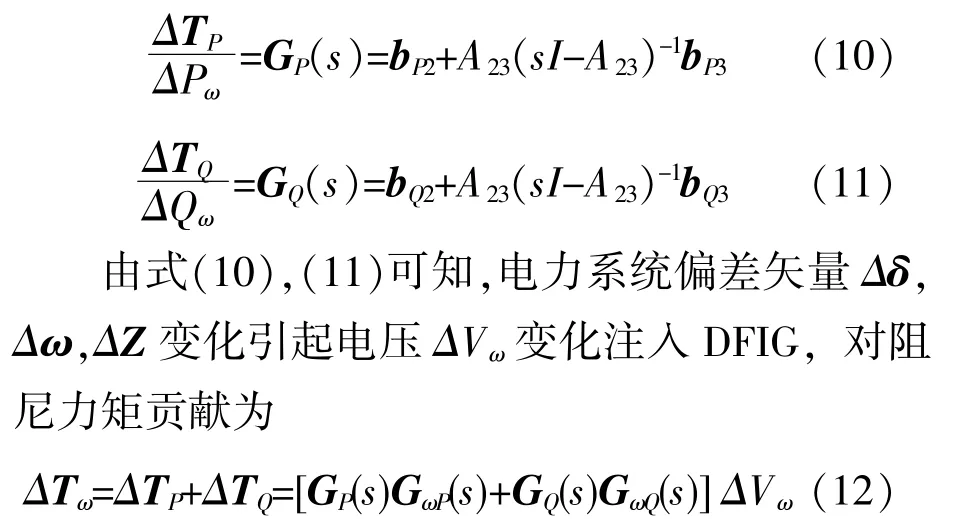
由式(12)可以看出,阻尼力矩與PCC節點電壓ΔVω成正比。因此,可以通過應用阻尼力矩幅值(DTA)來分析DFIG引入對節點電壓ΔVω幅值的影響[17],[18]。
2.3 基于狀態反饋解耦控制方法
本文將DFIG視為一個單輸入雙輸出的反饋控制器,提出對其傳遞函數陣GωP(s)和GωQ(s)進行狀態反饋解耦控制,通過在DFIG中引入輸入變換陣F和狀態反饋陣K,使得DFIG傳遞函數陣變為非奇異對角矩陣,即可實現對Δδ,Δω,ΔZ的一對一控制。然后根據耦合系數Cg1,Cg2,Cg3與阻尼比之間的關系,調節耦合系數Cg1,Cg2,Cg3的數值,改變阻尼比進而抑制低頻振蕩,保證電力系統穩定性。具有DFIG并網的電力系統的閉環控制系統解耦模型如圖4所示。圖中:Fij(i=1,2;j=1,2)為輸入變換陣F中的元素;Kij(i=1,2;j=1,2)為狀態反饋陣K中的元素;Gij,Hij,Jij(i=1,2;j=1,2)為DFIG狀態空間表達式系數矩陣中的元素。
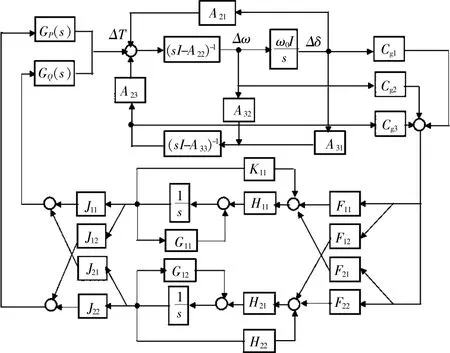
圖4 含DFIG電力系統的閉環控制系統解耦模型Fig.4 Decoupling model of closed-loop control system with DFIG power system
由圖4可以分別寫出阻尼力矩ΔT對Δδ,Δω,ΔZ整個系統閉環傳遞函數為φδ(s),φω(s),φZ(s)。然后將此傳遞函數模型進行模型降階,降為二階模型與其他階次模型形式,以Δδ為例,假設其降階后模型為
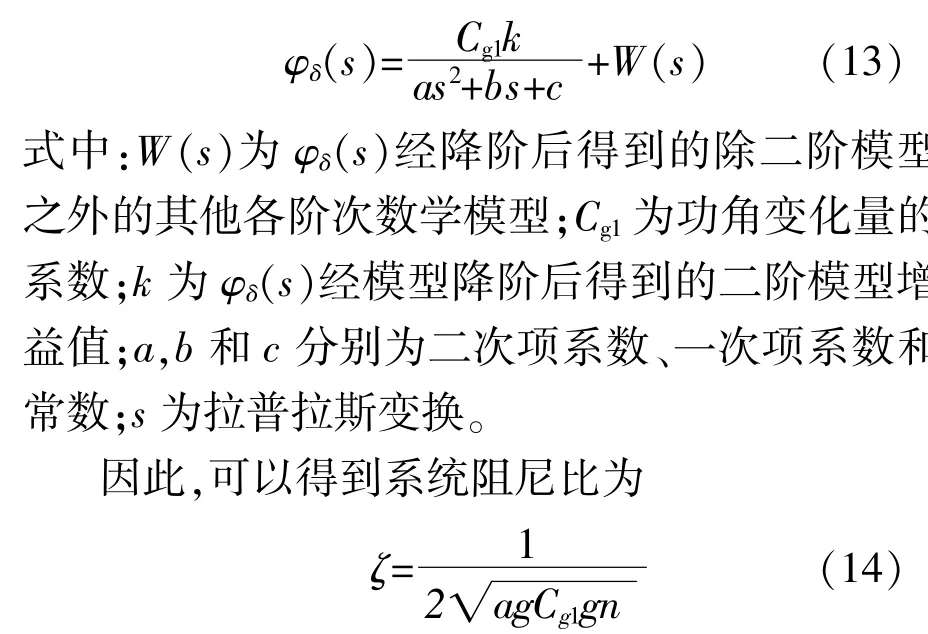
由式(14)可知,通過減小參數Cg1可以提高整個系統的阻尼比。同時,經仿真驗證,減小Cg1值,還能降低Δδ變化對阻尼力矩幅值的影響。
2.4 基于狀態反饋解耦控制設計步驟
本文基于狀態反饋解耦控制提高阻尼比的具體流程如圖5所示。
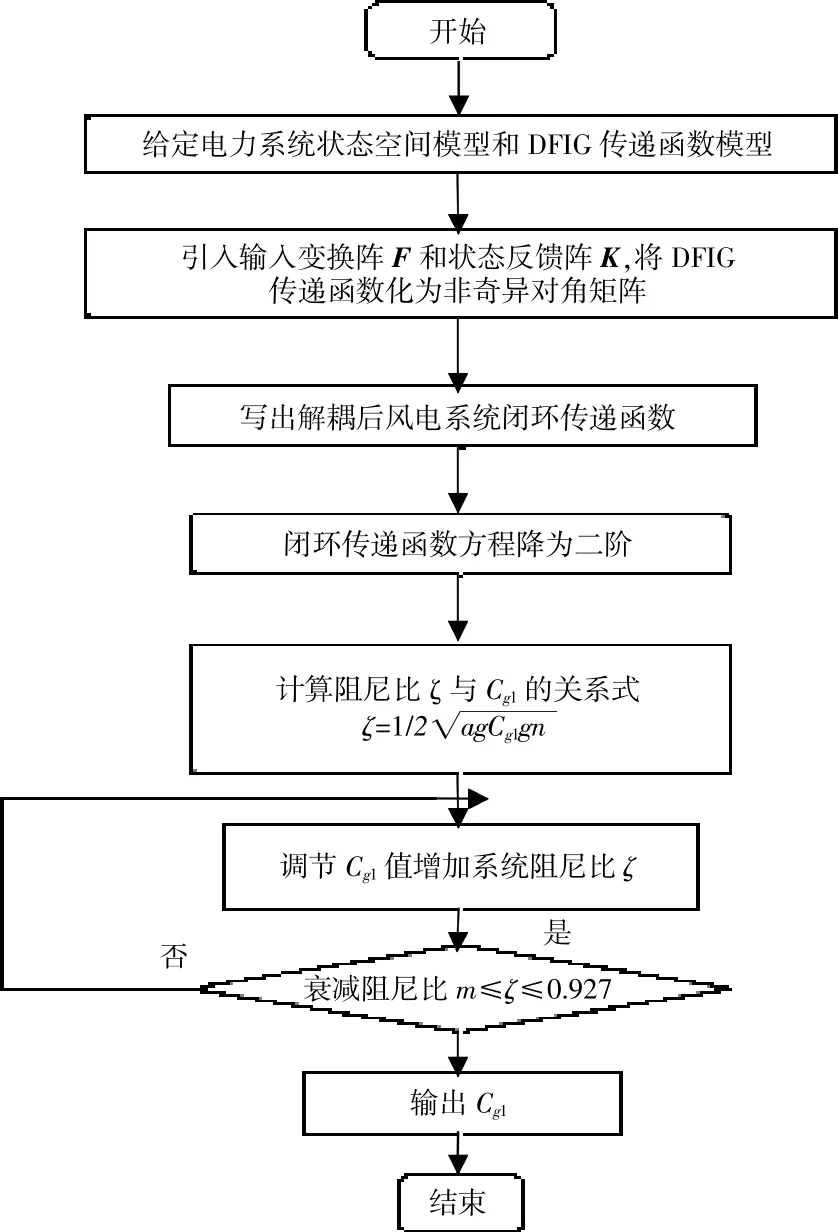
圖5 基于狀態反饋解耦控制提高阻尼比流程圖Fig.5 Flow chart of improving damping ratio based on state feedback decoupling control
3 仿真驗證
本文以風電接入四機兩區域系統作為算例仿真進行驗證,在Matlab/Simulink環境中建立仿真模型,如圖6所示。
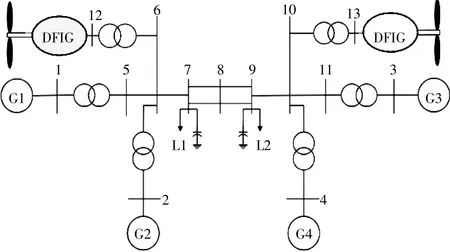
圖6 風電接入四機兩區域系統模型Fig.6 Four-machine and two-area of wind power system model
通過設置一個二階傳遞函數進行模擬驗證參數控制阻尼比,并同時降低阻尼力矩幅值變化效果。圖中:區域1含有兩臺容量為900 MW同步發電機G1,G2和一臺DFIG,DFIG經長距離輸電線路接入母線6;區域2含有兩臺900 MW同步發電機組G3,G4和一臺DFIG,DFIG經長距離輸電線路接入母線10。具體參數設定如下。
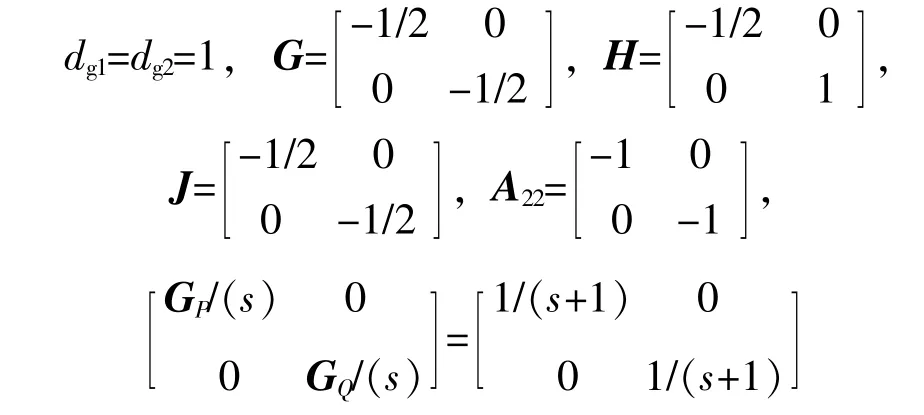
參考DFIG阻尼特性[24],計算參數Cg1,Cg2,Cg3對應阻尼的數值如表1所示。
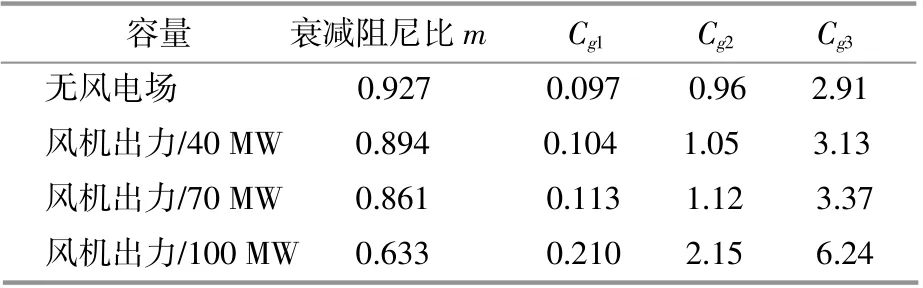
表1 不同風機出力條件下阻尼比對應C g1,C g2,C g3的數值Table 1 The values of damping ratio corresponding to Cg1,Cg2,Cg3 under different fan output conditions
系統阻尼比隨參數Cg1,Cg2,Cg3變化仿真曲線如圖7所示。
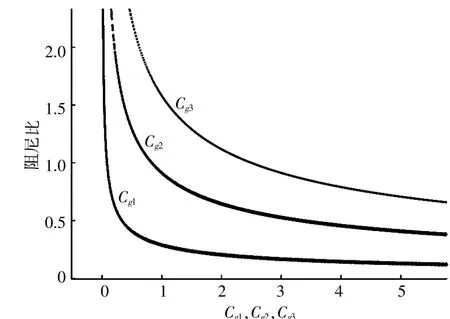
圖7 阻尼比隨C g1,C g2,C g3變化曲線Fig.7 Variation curve of damping ratio with Cg1,Cg2,Cg3
由圖7可以看出,隨著參數Cg1,Cg2,Cg3增大,系統阻尼減小,阻尼比與參數Cg1,Cg2,Cg3成反比。因此,可以通過減小參數的方式來提高系統阻尼比。
本文將Cg1,Cg2,Cg3代入仿真算例系統模型,并與傳統狀態觀測器方法進行對比。
(1)Cg1和Cg2解耦后阻尼力矩幅值變化
基于本文提出的算法,再根據本節使用的算例,得出功角和角速度解耦后阻尼力矩幅值變化,如圖8所示。

圖8 功角和角速度解耦后阻尼力矩幅值變化Fig.8 Amplitude changes of the damping torque after decoupling of the power angle and frequency
由圖8可知:在相同激勵條件下,功角和角速度通過狀態反饋解耦控制與傳統狀態觀測器相比,對阻尼力矩振幅抑制明顯;通過狀態反饋解耦控制,使得Cg1作用下阻尼力矩振幅為[-0.007,0.172]N·m,Cg2作用下阻尼力矩振幅為[-0.053,0.612]N·m,而且振幅逐漸減小;而通過傳統方法加入狀態觀測器,Cg1作用下阻尼力矩振幅約為[-0.221,0.588]N·m,Cg2作用下阻尼力矩振幅為[-0.401,0.731]N·m,而且振幅時常跳變。
因此,本文所述方法在功角和角速度作用于阻尼力矩幅值時,其振幅有所減小,而且逐步趨于穩定。
(2)Cg3和Cg1解耦后阻尼力矩幅值變化
基于本文提出的算法,再根據本節使用的算例,得出阻抗和功角解耦后阻尼力矩幅值變化,如圖9所示。
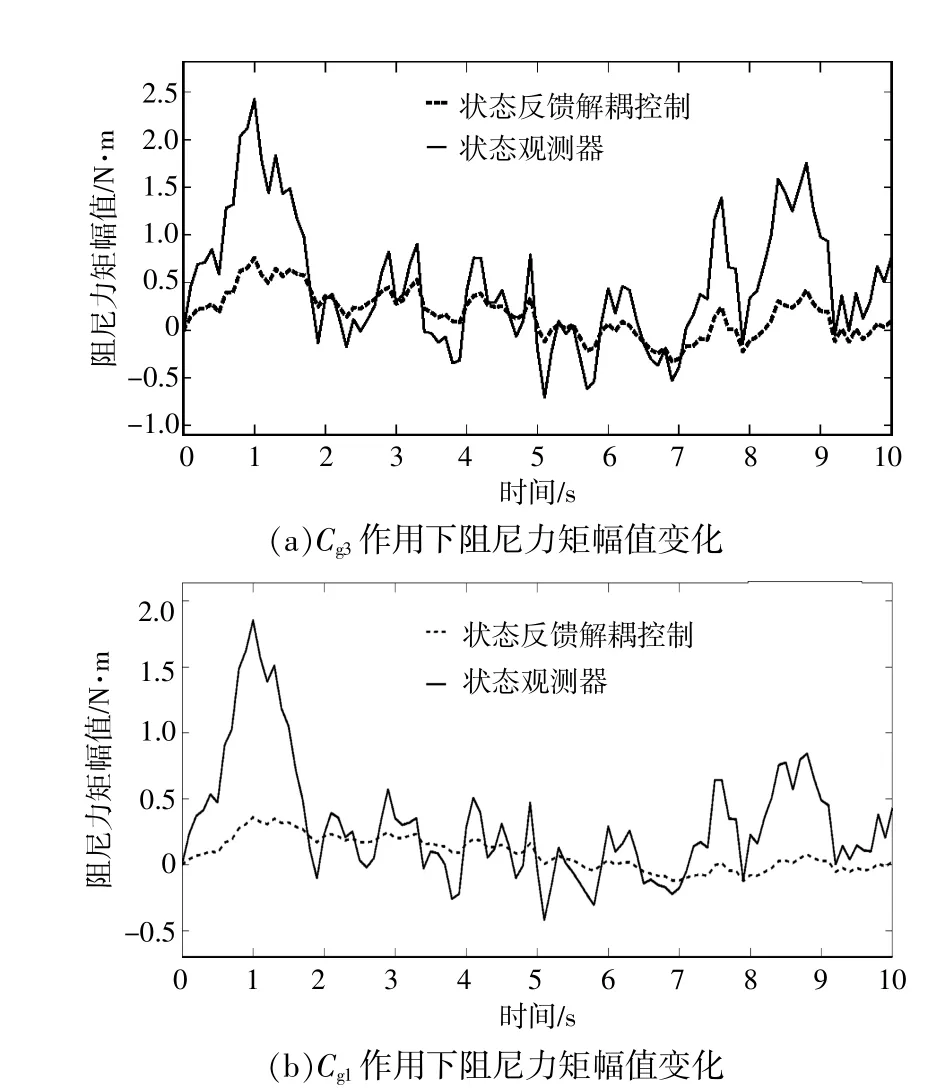
圖9 阻抗和功角解耦后阻尼力矩幅值變化Fig.9 Amplitude changes of the damping torque after decoupling of impedance and the power angle
由圖9可知:在相同激勵條件下,阻抗和功角通過狀態反饋解耦控制與加入狀態觀測器相比抑制明顯;狀態反饋解耦控制使得Cg3作用下阻尼力矩振幅為[-0.60,0.62](N·m),Cg1作用下阻尼力矩振幅為[-0.13,0.36](N·m);而傳統方法加入狀態觀測器,Cg3作用下阻尼力矩振幅為[-0.707,2.426](N·m),Cg1作用下阻尼力矩振幅為[-0.427,1.86](N·m)。兩種方法雖然都未使阻尼力矩幅值趨于平穩,但狀態反饋解耦方法對阻尼力矩振幅抑制作用更優越,而且幅值跳變明顯小于傳統方法。
(3)Cg2和Cg3解耦后阻尼力矩幅值變化
基于本文提出的算法,再根據本節使用的算例,得出角速度和阻抗解耦后阻尼力矩幅值變化圖,如圖10所示。
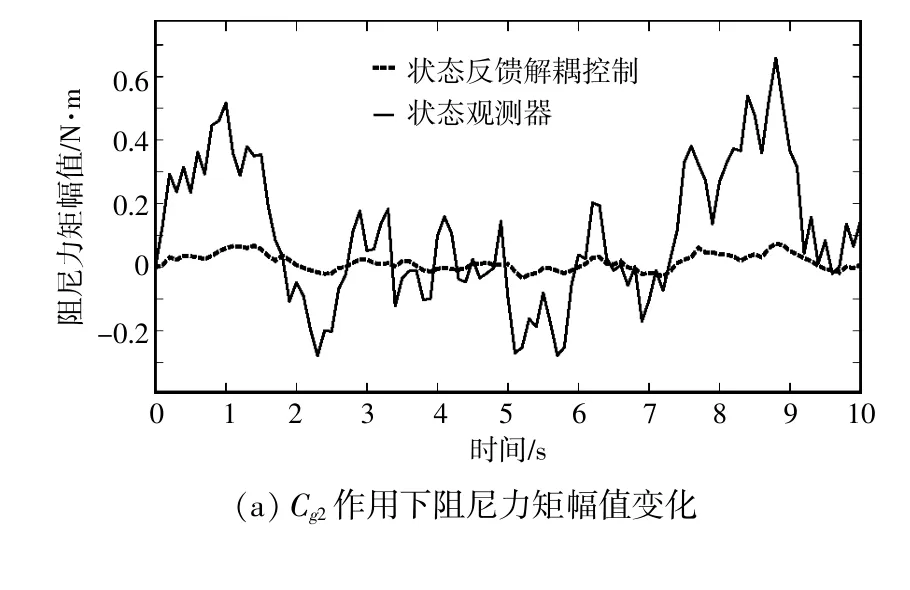
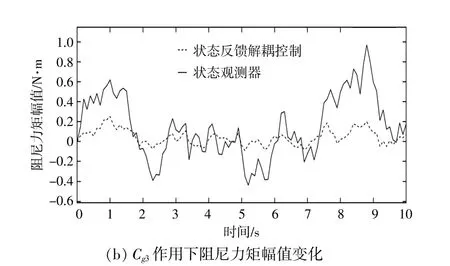
圖10 角速度和阻抗解耦后阻尼力矩幅值變化Fig.10 Amplitude changes of the damping torque after decoupling of frequency and impedance
同樣,由圖10可知,在相同激勵條件下,角速度和阻抗通過狀態反饋解耦控制與加入狀態觀測器相比,狀態反饋解耦控制作用對阻尼力矩振幅抑制更明顯,作用結果與圖9類似,不再贅述。
由圖8~10可知,本文所提方法對阻尼力矩幅值抑制更強,式(11)已分析阻尼力矩與PCC節點電壓ΔVω成正比,因此PCC節點電壓ΔVω幅值得以抑制,從而可以保證含風電四機兩區域間低頻振蕩控制穩定。
本文控制方法對低頻振蕩的功角和角速度抑制效果如圖11所示。
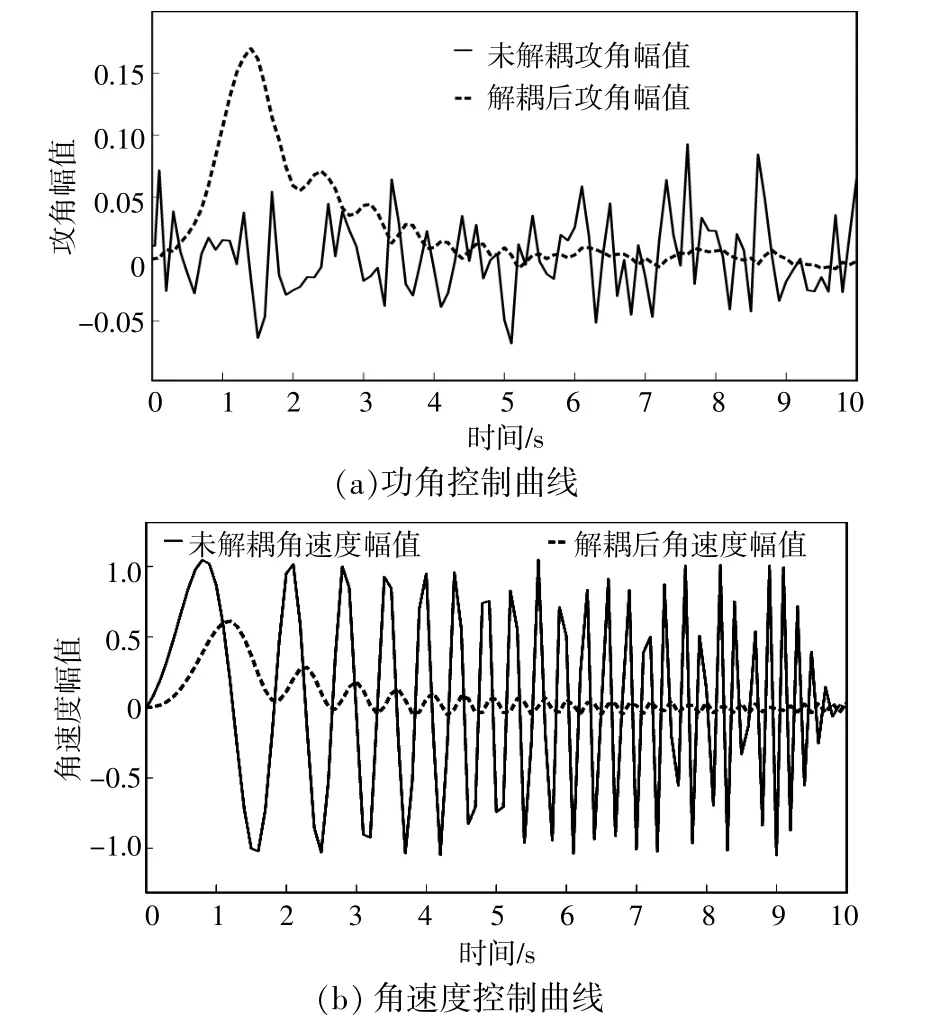
圖11 本文方法對低頻振蕩抑制效果Fig.11 Suppressing effects of low frequency oscillation by the method in this paper
由圖11可知,使用本文方法后,同步發電機的功角和角速度幅值抑制效果顯著,可以快速平息低頻振蕩現象。
4 結論
對含DFIG電力系統可能造成的區域低頻振蕩問題,本文提出一種基于狀態反饋解耦控制的提高阻尼比方法,并給出算法設計流程。根據DFIG傳遞函數數學模型得出其狀態空間表達式,并引入輸入變換陣F和狀態反饋陣K,將DFIG傳遞函數陣化為非奇異對角矩陣,將系統變為單輸入單輸出系統。在風電接入四機兩區域上進行仿真驗證,仿真結果表明,本文方法與傳統狀態觀測器法相比,不僅能提高阻尼比,而且對功角Δδ、角速度Δω、阻抗偏差變量ΔZ變化引起的PCC節點電壓ΔVω幅值變化抑制明顯,ΔVω曲線逐步趨于平穩。因此,本文方法可以有效地改善含DFIG電力系統所引起的阻尼比衰減問題,同時實現對PCC節點電壓ΔVω幅值抑制,可有效地抑制含DFIG電力系統低頻振蕩,為其他工程實踐提供借鑒。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19