構(gòu)架式可展開天線反射器模塊化構(gòu)型設(shè)計優(yōu)化
2022-02-24 01:59:42胡飛宋燕平黃志榮李怡晨馬小飛李婉
中國空間科學技術(shù) 2022年1期
關(guān)鍵詞:模塊化
胡飛,宋燕平,黃志榮,李怡晨,馬小飛,*,李婉
1. 中國空間技術(shù)研究院西安分院,西安 710100 2. 陜西科技大學 電子信息與人工智能學院,西安 710100
1 引言
構(gòu)架式空間可展開天線是一種由多基本單元組合而成的大型桁架結(jié)構(gòu)[1],在航天領(lǐng)域應用較為廣泛,具有收納比高、精度高、結(jié)構(gòu)穩(wěn)定性好等特點。通過改變基本單元連接形式可靈活構(gòu)造桁架結(jié)構(gòu)系統(tǒng),可滿足不同天線反射面的設(shè)計要求[2]。目前已有多個大型構(gòu)架式可展開天線成功應用于空間探索。
天線構(gòu)型設(shè)計是可展開天線相關(guān)理論研究中較基礎(chǔ)的研究問題。由于構(gòu)架式可展開天線反射器屬于空間多鏈路耦合機構(gòu),其構(gòu)型綜合難度較大,需從本質(zhì)出發(fā),對可展開天線構(gòu)型進行綜合和分析,提高可展開天線的結(jié)構(gòu)性能和運動協(xié)調(diào)性。空間多鏈路耦合機構(gòu)的構(gòu)型綜合主要有四類方法:圖論、幾何法、位移群論和螺旋理論。Warnaar借助于圖論的方法首次對空間可展開機構(gòu)進行了系統(tǒng)的綜合[3,4],并在自由度計算公式列舉法的基礎(chǔ)上提出了關(guān)節(jié)鉸鏈的分配方法。對于簡單可展Bennett機構(gòu)[5, 6]、Myard機構(gòu)[7]和Bricard機構(gòu)[8],Li用幾何參數(shù)法解釋了上述簡單機構(gòu)的能動性,發(fā)現(xiàn)了一些新穎的可展機構(gòu)[9]。Herné通過位移集(群)的非空子集(復數(shù))表示任意一組剛體位置,表征了給定機構(gòu)的任何一對剛體之間的連接方式[10]。Liu根據(jù)四面體單元的多鏈路耦合特性,構(gòu)造了四面體單元的等效機構(gòu),化簡了多單元組成的構(gòu)架式天線結(jié)構(gòu),獲得了全R四面體單元構(gòu)架反射器機構(gòu)的自由度[11]。
上述文獻對多鏈路耦合機構(gòu)的構(gòu)型進行了分析研究,特別是針對四面體單元構(gòu)架式天線研究較多,如圖1所示。由于四面體單元構(gòu)架式天線桿件及花盤等構(gòu)件眾多,且各同步桿長度不等長,因此現(xiàn)階段構(gòu)架式天線模型設(shè)計步驟較為復雜[12]。另一方面,四面體單元構(gòu)架式天線機構(gòu)自由度多,在各同步桿中心鉸鏈處添加扭簧來驅(qū)動天線展開[13]。由于驅(qū)動能量巨大,造成天線展開不可控的現(xiàn)象,這給天線的展開可靠性帶來巨大的不確定性。因此,結(jié)合構(gòu)架式可展開天線的發(fā)展趨勢,需設(shè)計一種自由度較少的模塊化構(gòu)架式天線,既能滿足收納比(工作表面的投影在展開與收攏完全時面積的比值)大,又能滿足可控展開的特點。
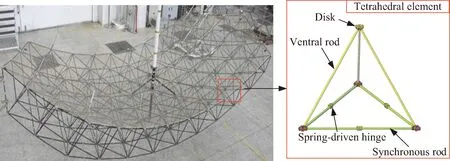
圖1 四面體單元構(gòu)架式天線Fig.1 A truss antenna composed of tetrahedral elements
2 模塊化構(gòu)架天線結(jié)構(gòu)設(shè)計
2.1 基本模塊選擇
大型構(gòu)架式可展開天線主要采用模塊組合思想,首先應確定模塊結(jié)構(gòu)與構(gòu)型。為保證模塊結(jié)構(gòu)簡單,需滿足兩個設(shè)計要求:1)模塊為單自由度可展機構(gòu);2)模塊具有封閉的桁架結(jié)構(gòu),提高整體剛度。傳統(tǒng)的構(gòu)架式可展天線由四面體單元組合而成,在構(gòu)型為3RR-3RRR的四面體單元可展機構(gòu)基礎(chǔ)上,利用3個構(gòu)型為3RR-3RRR四面體單元共用一個花盤的特點構(gòu)建平面模塊,同時要求桁架結(jié)構(gòu)是封閉的,模塊構(gòu)型為3(3RR-3RRR)-3RRR-3RRR,如圖2所示。此模塊機構(gòu)的自由度為1[14],即只需一個驅(qū)動可使模塊由收攏狀態(tài)變?yōu)檎归_狀態(tài),可稱之為單自由度模塊。
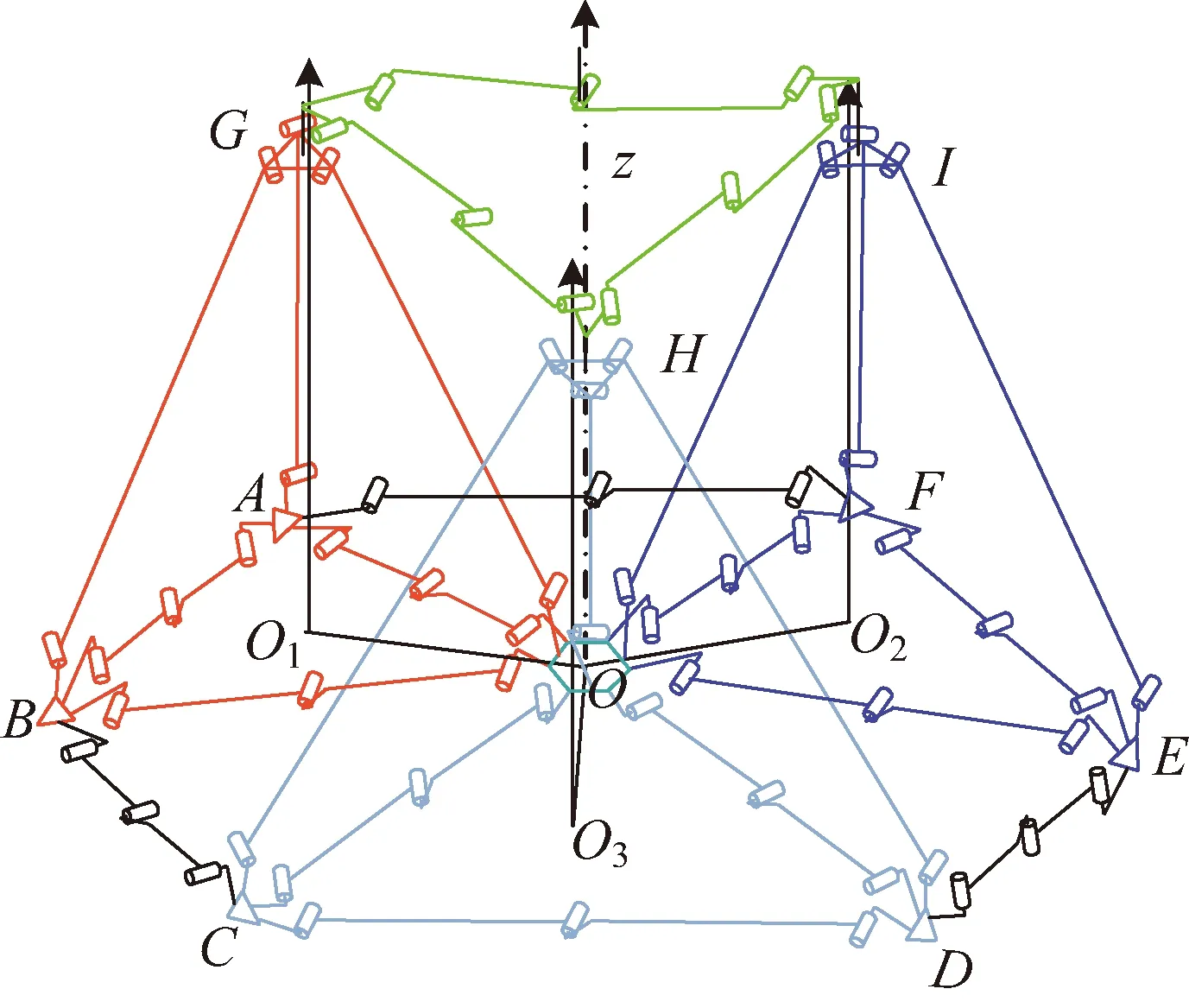
圖2 3(3RR-3RRR)-3RRR-3RRR模塊Fig.2 3 (3RR-3RRR)-3RRR-3RRR module
2.2 反射面幾何結(jié)構(gòu)設(shè)計
四面體單元構(gòu)架式天線采取各單元共用花盤的連接組網(wǎng)形式,而模塊化構(gòu)架式天線采用花盤與花盤連接的組網(wǎng)形式,由相同構(gòu)型的模塊拼接組裝形成,如圖3所示。模塊化構(gòu)架式天線反射面為球面或拋物面,網(wǎng)格劃分由正六邊形模塊組成,所有模塊的構(gòu)型相同,且單個模塊由3個相同構(gòu)型的四面體單元組成,并且組成單個模塊的3個四面體單元尺寸相等。
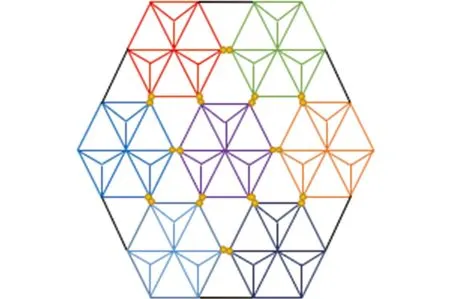
圖3 模塊化構(gòu)架天線反射器Fig.3 Module networking
若兩圈六邊形節(jié)點都在同一個球面O上,形成球面反射器,設(shè)球面半徑為R,中心模塊正六邊形①的邊長為l1,周邊模塊正六邊形②的邊長為l2。對球面反射器進行正視投影和俯視投影,如圖4所示。
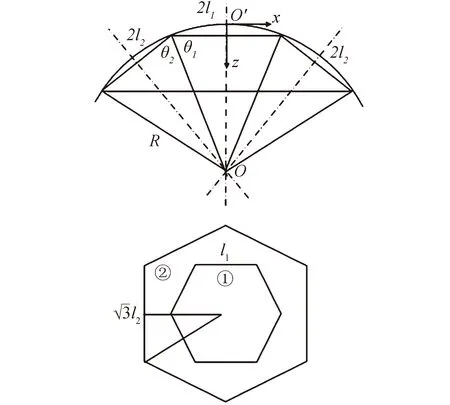
圖4 正視投影和俯視投影Fig.4 Orthographic projection and downward projection
當周邊模塊正六邊形②的邊長與中心模塊正六邊形①的邊長滿足下列關(guān)系:

(1)


已知被擬合的模塊化構(gòu)架式天線反射面的焦距為p=1 000 mm,根據(jù)最小二乘法[15]求得的擬合球面半徑為R=3 000 mm,擬合球面方程表達式為:

(2)


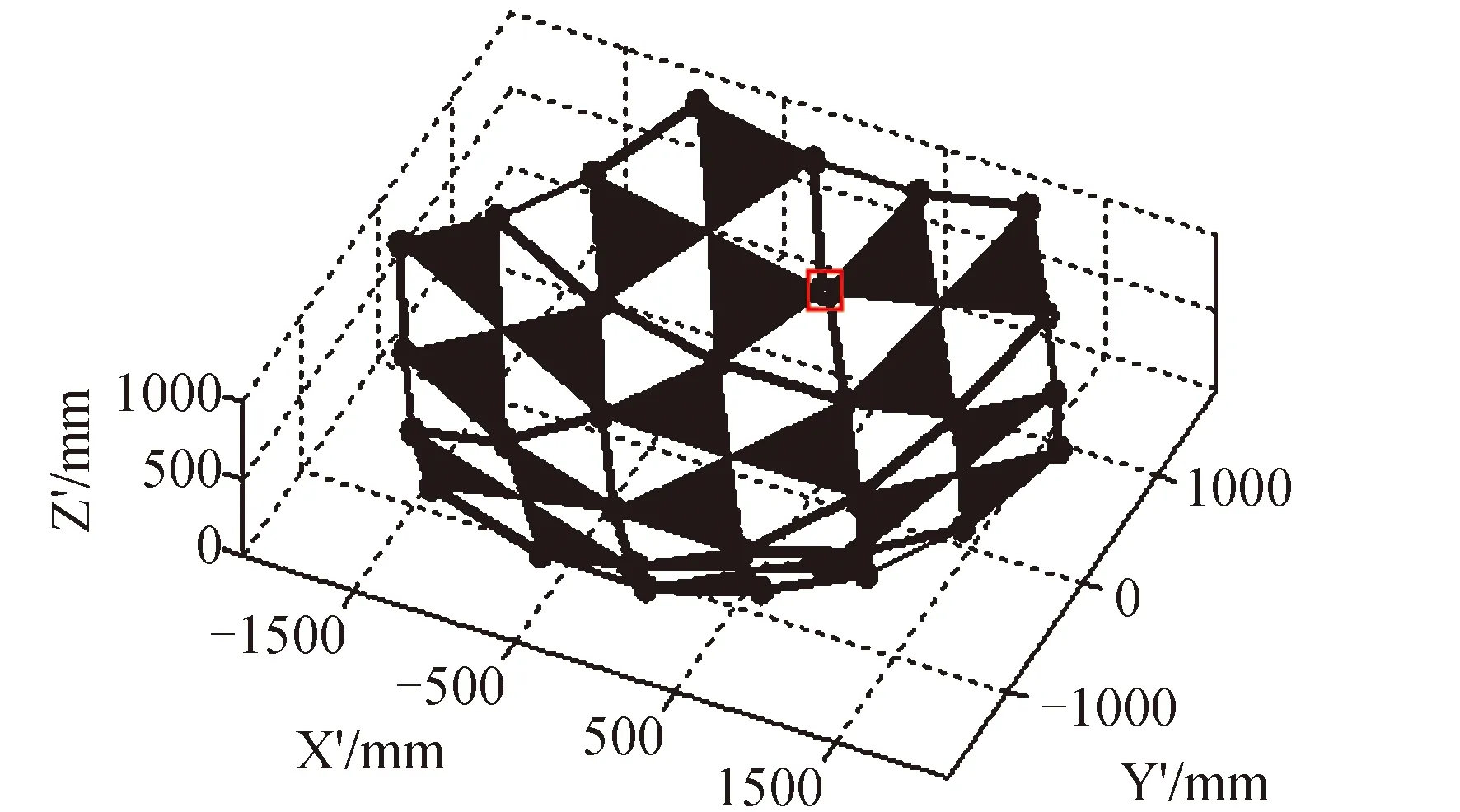
圖5 模塊化構(gòu)架式天線反射器Fig.5 Modular truss antenna reflector
3 多模塊構(gòu)型設(shè)計
模塊間的連接不再采用共用花盤的方式,而是采用花盤與花盤相連接的方式,即在模塊間的兩花盤間添加某種運動副。為了保障天線正常展開至工作狀態(tài),對模塊化構(gòu)架式可展開天線構(gòu)型機理必須給予充分研究。首先在模塊間添加轉(zhuǎn)動副(R)的連接方式,從圖6中可以看出三個相鄰的任意模塊組合為一個復雜的多環(huán)耦合結(jié)構(gòu),為簡化模型,取出三模塊組成的閉環(huán)機構(gòu),構(gòu)型為3(7R)-3R,如圖7所示。
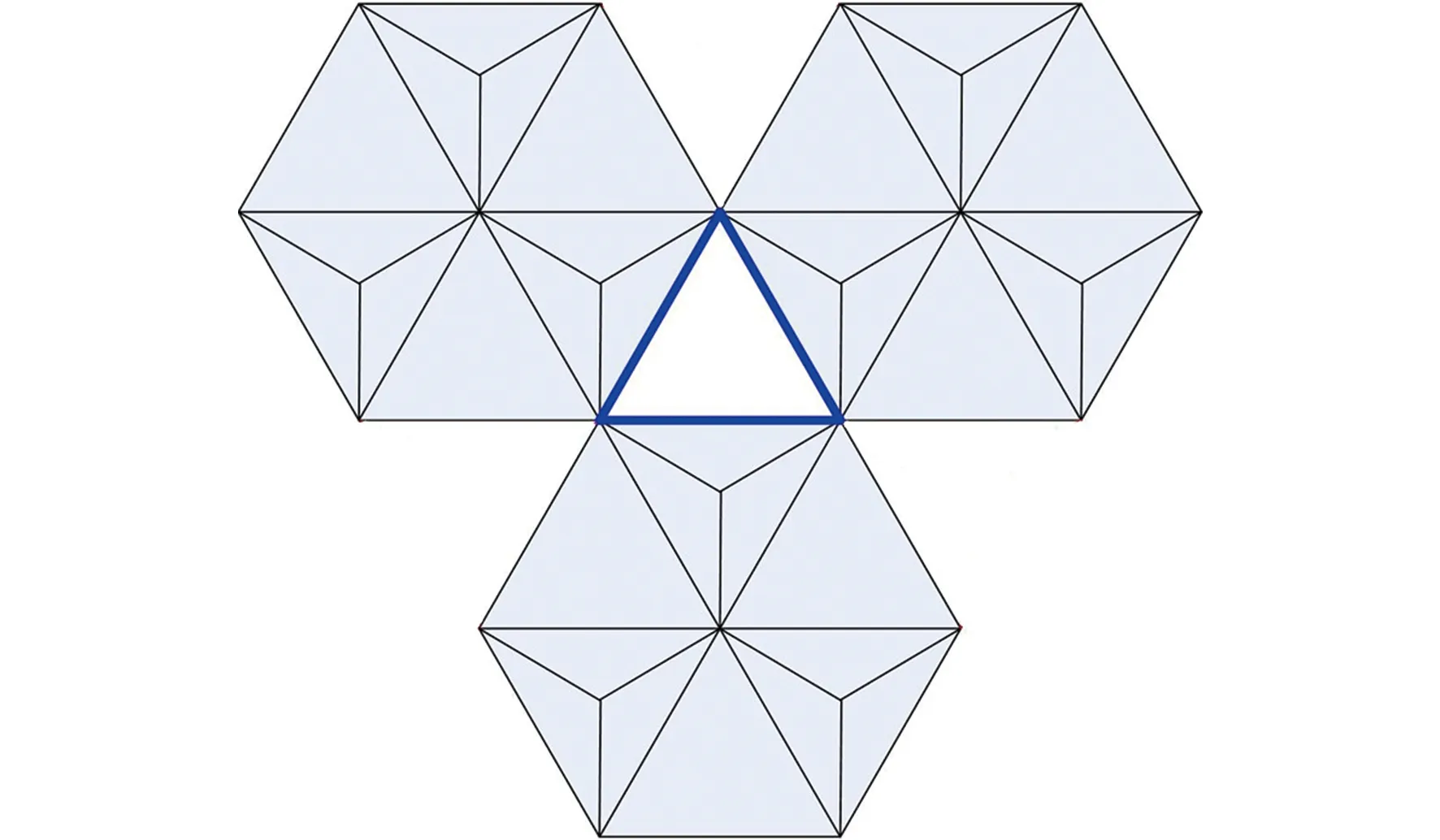
圖6 多模塊組合單元Fig.6 Multi-module unit
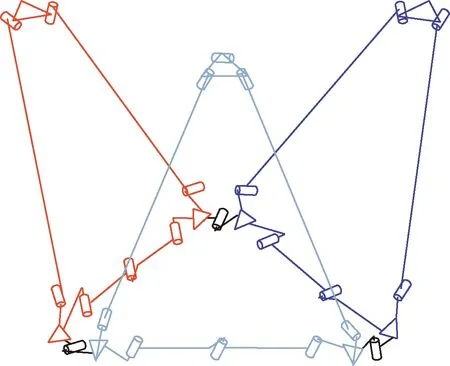
圖7 3(7R)-3R機構(gòu)Fig.7 3(7R)-3R mechanism
采用等效法[16-18],對圖7所示的耦合機構(gòu)進行分析。首先考慮由腹桿和同步桿組成的單閉環(huán)機構(gòu)7R,如圖8所示。單閉環(huán)機構(gòu)可看成兩條鏈組成的并聯(lián)機構(gòu):一條支鏈為S1-S2-S3-S4-,另一條支鏈為S5-S6-S7-。花盤C為動平臺,花盤D為定平臺。
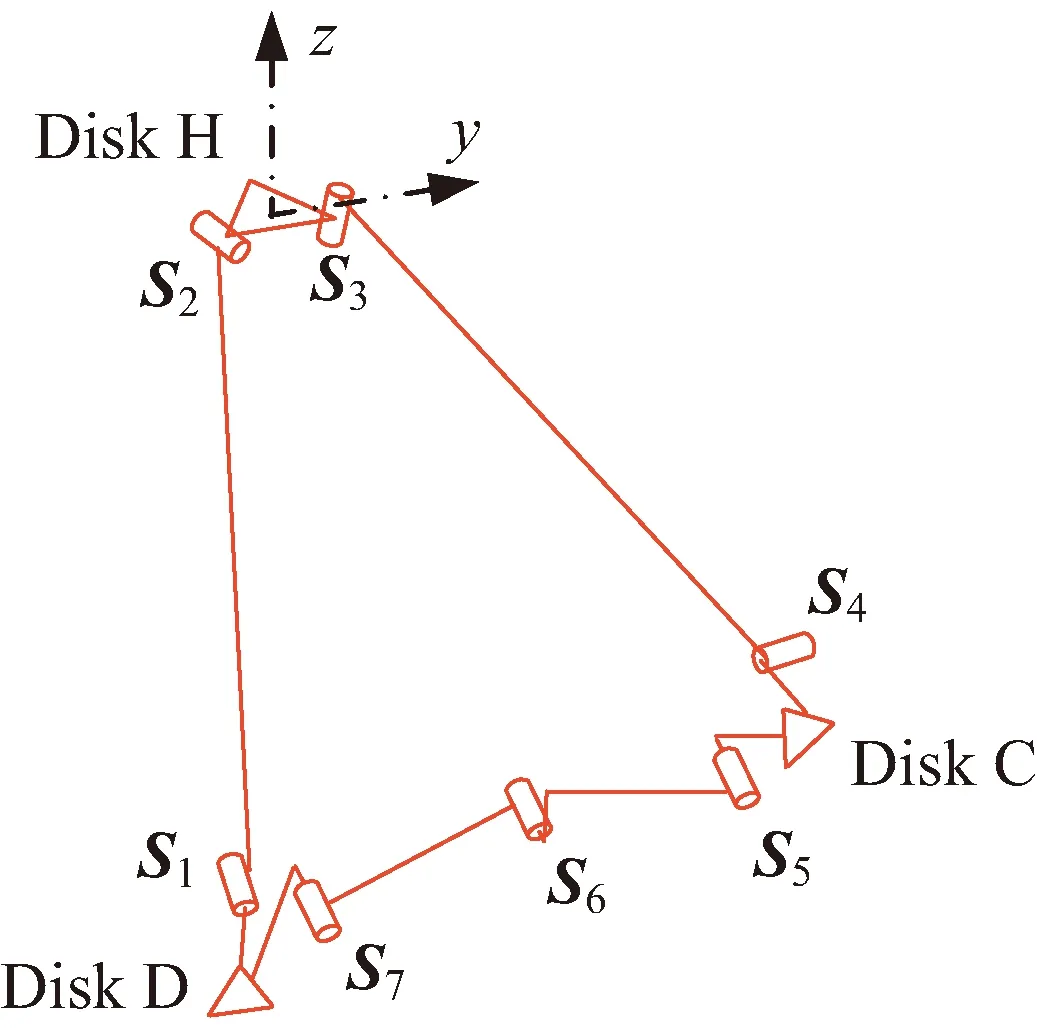
圖8 單閉環(huán)機構(gòu)Fig.8 single closed-loop mechanism

(3)
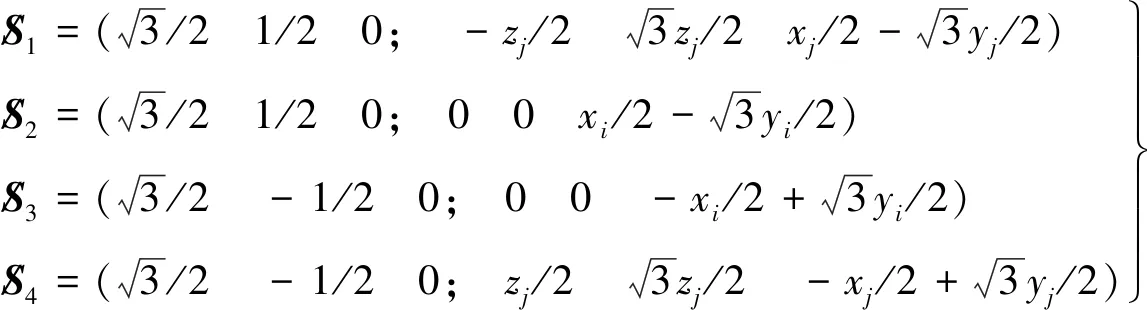
式中:S1、S2、S3、S4鉸鏈中心位置的坐標分別為P1(xjyjzj)、P2(xiyi0)、P3(xi-yi0)、P4(xj-yjzj)。
根據(jù)螺旋理論可知支鏈的運動螺旋和約束螺旋的互易積為0,即:
S/m°S/r=0
(4)
式中:S/m為運動螺旋,S/r為約束螺旋,“°”代表兩旋量的互易積符號。
可通過求上述螺旋的反螺旋可得S1-S2-S3-S4-支鏈提供給花盤C的約束螺旋。求得的約束螺旋系為:
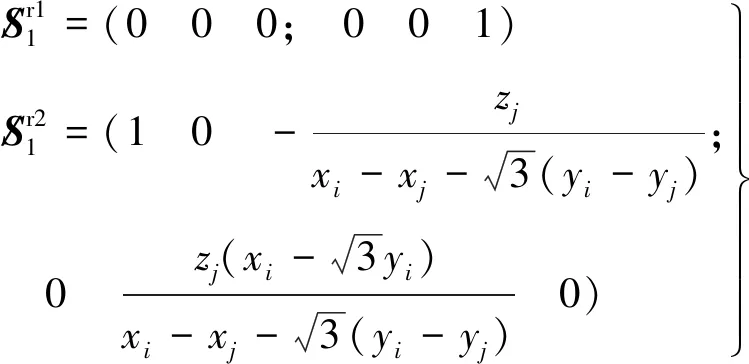
(5)
支鏈S5-S6-S7-的運動螺旋系為:
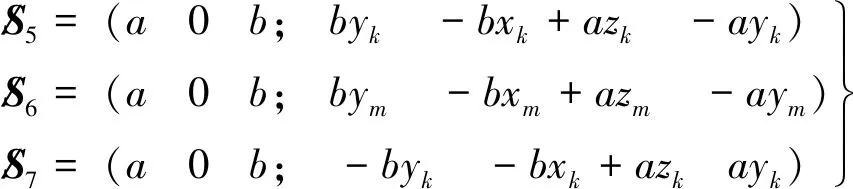
(6)
式中:S5、S6、S7鉸鏈中心位置的坐標為P5(xkykzk)、P6(xmymzm)、P7(xk-ykzk)。
求得支鏈S5-S6-S7-的約束螺旋系為:
(7)

(8)
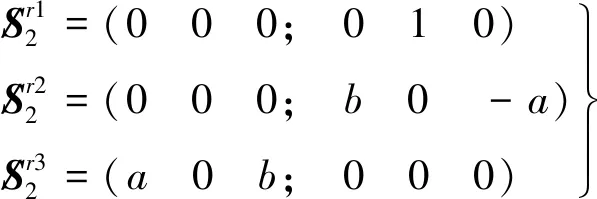
求得花盤C的等效運動螺旋為:

(9)
由此可知花盤C在天線收展時是沿著矢量方向(0 1 0)移動的即沿著y軸運動,閉環(huán)機構(gòu)可等效為一個花盤C與花盤D連線方向上的移動副。同理可知,另兩個由腹桿和同步桿組成的閉環(huán)機構(gòu)也可等效為移動副,則圖7可轉(zhuǎn)化為圖9。
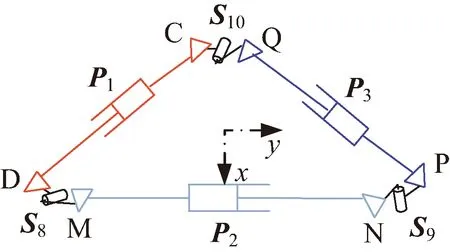
圖9 三模塊等效機構(gòu)Fig.9 Three-module equivalent mechanism
將圖9中相近的兩花盤及相連的轉(zhuǎn)動副(R)看作為一個廣義花盤,則圖9轉(zhuǎn)化為兩支鏈并聯(lián)機構(gòu):支鏈P1-P2-和支鏈P3-,如圖10所示,動平臺為B′,定平臺為C′。由于3個移動副(P)的方向軸線處于同一平面,以三模塊形成曲面的中心點為原點,3個移動副(P)的方向軸線組成的平面的法線方向為z軸,移動副P2的軸線方向為y軸,建立坐標系。
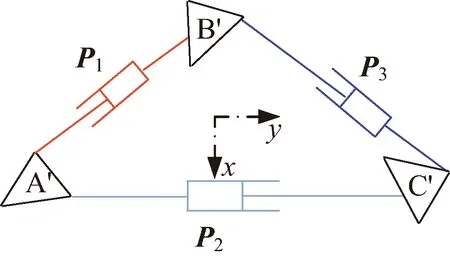
圖10 3P并聯(lián)機構(gòu)Fig.10 3P parallel mechanism
支鏈P1-P2-的在空間坐標系中的運動螺旋系為:

(10)
式中:(D1E10)、(0 1 0)分別為移動副P1、P2的運動方向。
則此支鏈的約束螺旋系為:
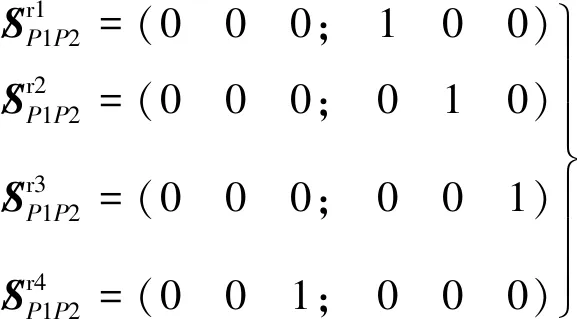
(11)
支鏈P3-的在空間坐標系中的運動螺旋為:
S/P3=(0 0 0;D3E30)
(12)
式中:(D3E30)為移動副P3的運動方向。 則此支鏈的約束螺旋系為:
(13)
由式(11)與式(13)可知,圖10中所示機構(gòu)的公共約束螺旋為:
(14)
則動平臺受到支鏈與支鏈提供的公共約束力有4個,即λ=4,則機構(gòu)的階數(shù)為:
d=6-λ=2
(15)
根據(jù)修正的Kutzbach-Grübler公式[19]可求得等效機構(gòu)自由度。
2(3-3-1)+3+0-0=1
(16)
式中:n表示機構(gòu)桿件數(shù)目;g表示運動副數(shù)目;fi表示第i個運動副的相對自由度數(shù);v是多環(huán)并聯(lián)機構(gòu)在去除公共約束的因素后的過約束的數(shù)目;ζ是機構(gòu)中存在的局部自由度。
對式(11)、式 (13)同時求反螺旋,可得廣義花盤B′等效運動螺旋為:

(17)
該螺旋表示沿著P3支鏈移動副軸線方向移動,表明了廣義花盤B′和廣義花盤C′能夠沿著固定方向相對運動。
綜上分析可見,圖6中三個模塊可實現(xiàn)同步的收攏展開運動,可以表征整體桁架機構(gòu)收展運動的關(guān)聯(lián)性,滿足收展的期望運動。
4 花盤調(diào)姿構(gòu)型優(yōu)化
構(gòu)架式天線的模塊通過轉(zhuǎn)動副(R)連接,由式(17)可知,機構(gòu)收展的自由度為1。當模塊化構(gòu)架式天線收展時,同一模塊上花盤朝著另一花盤移動,但是兩花盤的姿態(tài)沒有發(fā)生變化。這樣就造成了天線在收攏后,不同模塊的花盤姿態(tài)不一樣,各模塊的中心軸線依然垂直于天線展開時拋物面(工作表面)的切平面,使收納比較小。此時需要靠桿件變形及鉸鏈間隙等將背面或反射面上節(jié)點強制收攏到完全收攏狀態(tài),容易對天線結(jié)構(gòu)造成破壞,無法適應可展開天線的發(fā)展。考慮到平臺的安裝及金屬網(wǎng)的管理,要求在收攏后所有花盤姿態(tài)最好是水平的,即天線收攏后達到最大收納比,若在收攏過程中模塊能繞模塊間花盤連接節(jié)點擺動,可使各模塊機構(gòu)的中心軸線轉(zhuǎn)換到相互平行的位置。因此,需要在模塊間花盤連接處添加花盤姿態(tài)調(diào)整的自由度,使花盤姿態(tài)在運動過程中能夠發(fā)生偏轉(zhuǎn)。
圖9中以C花盤為動平臺,以Q花盤為定平臺,則支鏈分別為P1-S8-P2-S9-P3-和S10-。支鏈P1-S8-P2-S9-P3-的運動螺旋系為:
(18)
式中:(H1I1J1)、(H2I2J2)分別為轉(zhuǎn)動副S8、S9的軸線方向,且鉸鏈中心位置的坐標分別為(x8y8z8)、(x9y9z9)。

(19)

綜上,可在P1-S8-P2-S9-P3-約束支鏈上添加兩個轉(zhuǎn)動副(R)或一個轉(zhuǎn)動副(R)和一個移動副(P)。球面副(S)可用3個轉(zhuǎn)動副(R)代替,萬向副(U)可用兩個轉(zhuǎn)動副(R)代替,圓柱副(C)可用一個移動副(P)和轉(zhuǎn)動副(R)代替,則支鏈P1-S8-P2-S9-P3-轉(zhuǎn)化為PUPUP、PSPRP、PUPCP,如圖11所示。
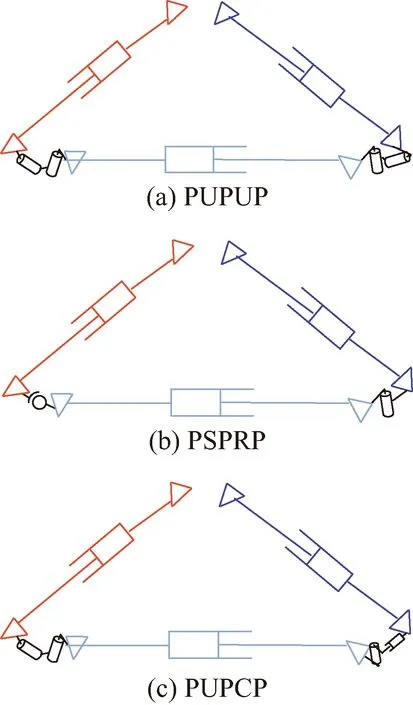
圖11 支鏈構(gòu)型優(yōu)化Fig.11 Configuration optimization
考慮結(jié)構(gòu)設(shè)計的方便及可實現(xiàn)性,采用PUPUP約束支鏈。為使C花盤和Q花盤也有相對擺動,同樣在花盤間添加一個轉(zhuǎn)動副(R)后轉(zhuǎn)化為萬向副(U),如圖12所示。該機構(gòu)某一模塊的花盤能夠繞與其連接的萬向副(U)軸線轉(zhuǎn)動,從而模塊的花盤能夠?qū)崿F(xiàn)有調(diào)姿的自由度。如此,在模塊構(gòu)架式天線收攏后,花盤調(diào)姿擺平,模塊化構(gòu)架式天線可達到最大收納比。
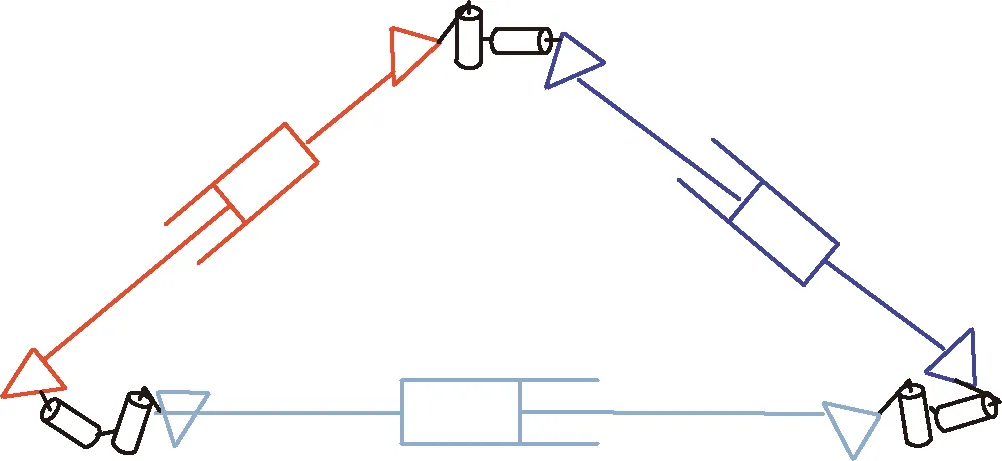
圖12 模塊連接構(gòu)型Fig.12 Module connection configuration
綜上所述,優(yōu)化后的等效機構(gòu)為閉環(huán)機構(gòu),既滿足收攏的期望運動,又滿足花盤調(diào)姿的期望運動。此等效機構(gòu)調(diào)姿的自由度為3,收攏自由度為1,則三模塊組成結(jié)構(gòu)的自由度為4。當7模塊拼接組網(wǎng)時,形成了6個閉環(huán)機構(gòu)。6個閉環(huán)機構(gòu)由于中心模塊的耦合作用,6個小閉環(huán)機構(gòu)形成了單閉環(huán)空間機構(gòu),過約束的數(shù)目v=1,機構(gòu)中存在的局部自由度ζ=5,則模塊組網(wǎng)天線自由度為:
6(6-6-1)+3×6+1-5=8
(20)
由式(20)可知模塊化構(gòu)架式天線為8自由度機構(gòu)。各模塊的背面層需通過連接支鏈連接,使得桁架系統(tǒng)結(jié)構(gòu)完整,剛度提高。背面層模塊連接機構(gòu)采用6自由度的SRS支鏈連接,對模塊運動無影響,可完整形成收納比較大的構(gòu)架天線,如圖13所示。以構(gòu)型RR-URU四面體單元組成的單元體構(gòu)架式天線為例[14],三圈的單元體構(gòu)架式天線與模塊化構(gòu)架式天線尺寸和形狀基本相同,此單元體構(gòu)架式天線完全展開到完全收攏所需自由度是55,由此可見模塊化構(gòu)架式天線自由度大大減少。模塊化構(gòu)架式天線在少自由度的基礎(chǔ)上,可添加電機驅(qū)動天線展開,代替彈簧驅(qū)動,可達到展開可控的目的。
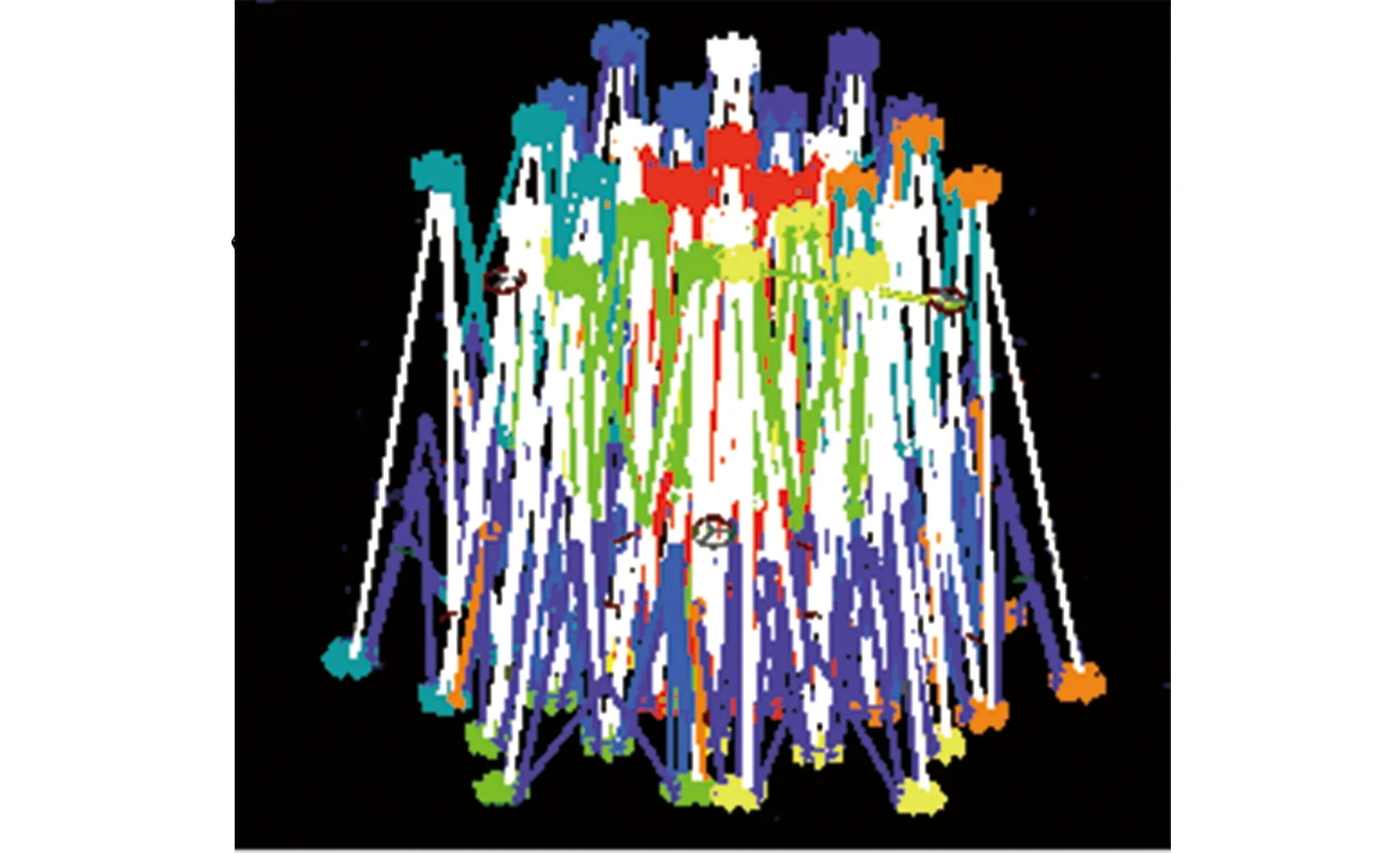
圖13 模塊化構(gòu)架完全收攏Fig.13 The modular truss antenna is fully folded
5 結(jié)論
本文采用模塊化思想,設(shè)計出了一種自由度少、收納比高的模塊化構(gòu)架式可展開天線反射器。多模塊組網(wǎng)后,基于螺旋理論分析了反射器桁架系統(tǒng)機構(gòu)的構(gòu)型,模塊化構(gòu)架式天線滿足了收攏的期望特征。根據(jù)構(gòu)架反射器桁架收展花盤姿態(tài)調(diào)整需求,進一步綜合出多模塊連接機構(gòu),實現(xiàn)了收納比大的構(gòu)架反射器桁架系統(tǒng)的綜合設(shè)計。相同尺寸的模塊化構(gòu)架式可展開天線與四面體單元構(gòu)架天線相比,自由度數(shù)目大大減少,為下一步分析此類天線機構(gòu)的展開特性及模塊同步展開控制奠定了堅實的理論基礎(chǔ)。
猜你喜歡
海洋信息技術(shù)與應用(2022年1期)2022-06-05 07:38:22
裝備制造技術(shù)(2021年2期)2021-07-21 05:38:44
現(xiàn)代裝飾(2020年5期)2020-05-30 13:01:56
汽車與新動力(2019年5期)2019-11-07 05:20:16
系統(tǒng)管理學報(2018年3期)2018-08-13 01:05:42
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(yè)(2017年4期)2017-06-21 06:29:52
流程工業(yè)(2017年4期)2017-06-21 06:29:50
石油化工建設(shè)(2015年2期)2015-12-01 04:16:44
中國教育技術(shù)裝備(2015年10期)2015-03-01 02:41:05