大疆精靈4ProRTK無人機航測成圖像控點密度與成果精度研究
2022-02-25 02:42:56鄭嘉立
福建建筑 2022年1期
關鍵詞:作業
鄭嘉立
(福建省建江水利水電設計咨詢有限公司 福建福州 350001)
0 引言
無人機低空航測受天氣和起飛場地條件影響小,效率高,獲取的影像分辨率高,具有對地快速、實時調查和監測的能力,在土地工程領域有著廣闊的應用前景[1]。在無人機低空航飛領域,普通小型多旋翼無人機作業在飛行時,因飛行姿態不穩定,飛行器自身攜帶的定位定姿系統定位精度不高,不能完全滿足測繪精度需求[2]。因此,需要在航帶附近布設較密的像控點,以保證像對的位置的正確性。而一塊區域下來,如要控制測區整體精度,需要布設的像控點較多。在野外布設過大密度像控點,增加了外業工作量,拖延外業工期,同時也是外業過程中成本投入比較大的一個部分。進行內業處理時,過多的像控點處理也需要花費大量時間來進行,影響到作業的進度與效率。
帶RTK小型多旋翼飛機具有自動化、智能化、專業化的特點,廣泛地應用于水利監測、公安反恐、小范圍的違法用地監測、高精度的地圖數據采集等方面[4]。該機具有普通小型多旋翼無人機的優點,同時具有RTK導航定位、相機與RTK系統實現微秒級時間同步等功能,通過網絡RTK模塊提高了定位精度,可以減少野外像控點的布設密度,達到寡像控點無人機大比例尺地形測量作業的目的。
本文以大疆精靈4ProRTK和中海達高精度航測PPK套裝為基礎,以小面積違法用地測繪為例,在大比例尺航攝成圖中像控點的密度對成圖精度的影響進行探討,以達到節省野外工作量、降低生產成本、提高生產效率的目的。
1 大疆精靈4proRTK作業流程
在大疆精靈4proRTK作業開始前,應先對測區進行全面踏勘,進行技術設計。根據航攝區域選擇基站架設的位置,布設像控點用于提高空三精度,進行規劃航線。對飛行器進行安裝,檢查飛行器的各項指標,設置好后,上傳數據至飛行器,起飛進行外業采集。
外業結束后,進行數據歸集,使用UAV-PPK解算每張像片的POS數據。計算好后,POS數據和圖片導入PIX4D進行初始化、點云和紋理等一系列圖形圖像處理,把處理好的圖形圖像導入EPS三維成圖軟件進行成圖。具體流程如圖1所示。

圖1 項目作業流程圖
2 像控點布設密度與成圖精度的探討
2.1 測區概況
測區位于連江縣潘度鄉和江南鄉,為帶狀地形,長約4000 m,寬約50 m,以丘陵為主,最大高差60 m。測區以連江縱二線104國道改線工程施工工地為主,本次測繪的目的是監測施工地違法占地的情況及繪制施工區內的數字線劃圖,坐標系采用2000國家大地坐標系,高程系統采用85高程系。
2.2 航測作業實施
2.2.1 像控點布設
帶狀測區正常情況需布設13至16個像控點,本研究中采用布設9個、6個以及3個像控點,屬于寡像控點,均勻分布于測區起止及中央。像控點采用預制標靶板鋪設地面上,或者采集明顯線狀地物交角。
2.2.2 像控點采集
利用福建省CORS系統直接采集2000國家大地坐標系,高程使用區域似大地水準面精化模型將采集的大地高轉化成1985國家高程,每個點2次不同時間段獨立采集,將兩次的結果進行比較,其平面較差小于±3 cm,高程較差小于±5 cm。
2.2.3 架設基準站
基準站架設于測區中心位置的已知點上,該點上空無遮擋,周圍無其他信號發射臺,無大水面反射面,通視條件良好,可以很好地接收衛星信號。通過Hi-UAV軟件,輸入基站高,設置1秒的采樣間隔,進行靜態采集。
精靈 Phantom 4 RTK無人機通過機載GNSS系統和慣性測量裝置IMU,獲取在曝光瞬間航攝儀的位置信息以及姿態信息。把無人機獲取的數據與地面站觀測數據使用UAV-PPK進行聯合后處理,從而獲得每張像片的外方位元素。
2.2.4 圖像采集
精靈 Phantom 4 RTK無人機起飛前,根據操作手冊對無人飛行器進行設置。飛行器將進行自檢。根據天氣及測區地形地貌情況,進行航攝參數的設置,本次航攝地面分辨率為0.1 m,航攝相對航高100 m,航向重疊度為80%,旁向重疊度70%,航線盡量和平行短邊,可以獲得較多的航空影像。航線規劃好后,上傳數據至飛行器,等待無人機搜索到衛星可以定位返航點后,起飛作業。在采集過程中,可以通過移動終端實時查看影像狀況。待飛行任務結束后,飛行器會自動返回起飛點。
2.2.5 圖像數據處理
飛行結束后,將采集的影像和機載數據文件、拍照點時刻文件及基站數據文件導入計算機,將外業數據歸集到一個數據文件夾中。通過目視檢查,選取合格的影像數據。然后導入UAV-PPK軟件解算每張的照片POS數據。將生成的POS數據文件導入Pix4D中,同時輸入空三解算所需的參數信息,而后進行自動空三解算等一系列自動化操作,并自動生成質量報告。
根據飛行器飛行方向找出有像控點的照片,通過Pix4D用不同的刺點方案(9個、6個和3個像控點)對影像進行刺點。每個像控點應在5張照片中刺出點位。Pix4D軟件采用光束法平差的算法自動進行相對定向和絕對定向,同時自動剔除粗差。空三成果如圖2所示。

圖2 空三示意圖
待解算完成后,經點云和紋理及DSM、正射影像和指數的步驟處理,自動生成數字表面模型(DSM)如圖3所示及正射影像圖(DOM)如圖4所示。
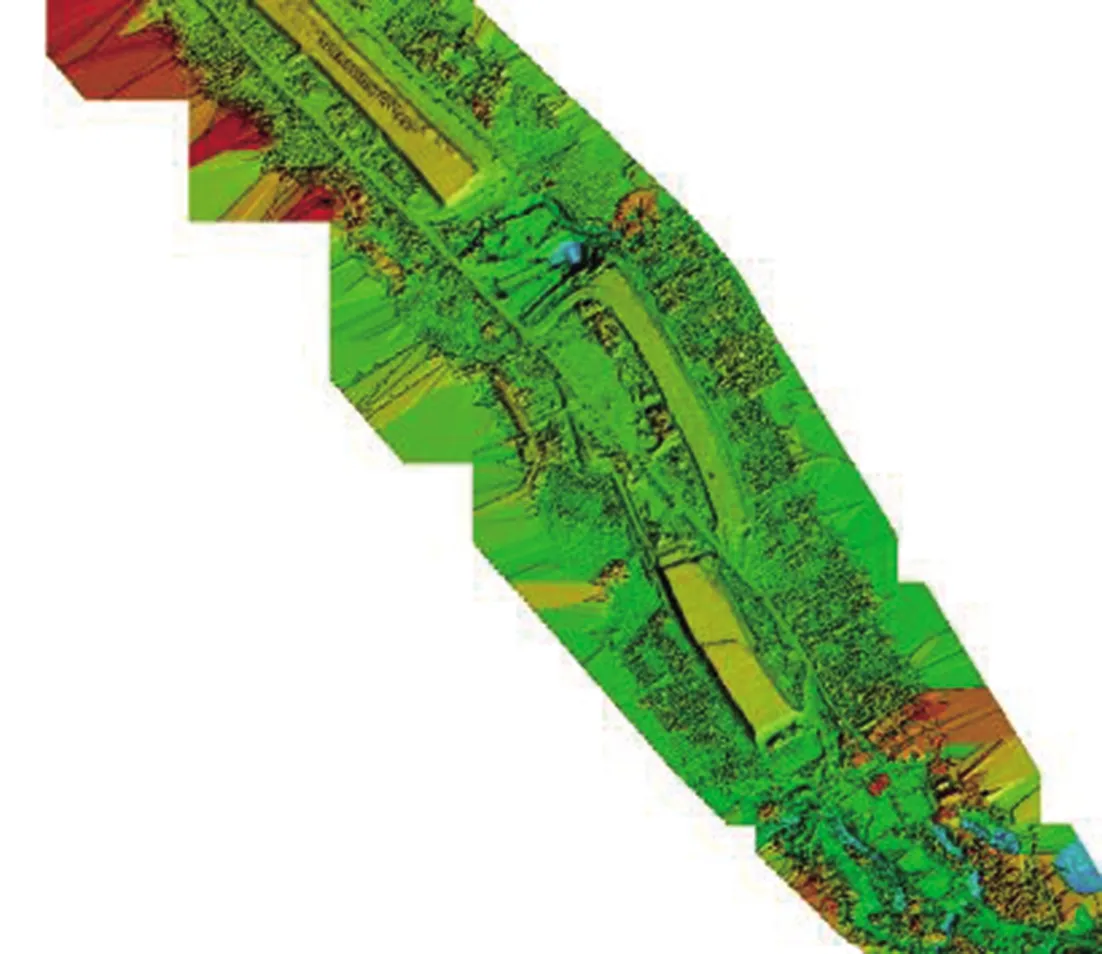
圖3 數字表面模型示意圖

圖4 正射影像圖示意圖
2.3 精度評定
對航攝影像的質量檢查及重疊度分析按常規進行,本文重點進行9個、6個和3個像控點條件下的成圖精度分析。通過在生成的立體模型中量測檢查點的三維坐標。用GNSS-RTK和全站儀對檢查點進行野外實地進行實地測量,通過比對,分別檢驗檢查點的平面精度和高程精度,檢測用寡(少量)像控點進行航測成圖的可行性。
檢查點由多余的像片控制點及均勻分布于整個測區的明顯的線狀地物特征點構成。每種布點方案均選取20個同名檢查點,進行外業實測坐標和高程,然后將其與在PIX4D輸出的模型上量取的坐標和高程進行對比,以確定精度是否滿足1∶1000測圖的要求。
從表1中可看出,使用大疆精靈4ProRTK,搭配中海達高精度航測PPK套裝,在野外減少布設像控點數量,對成圖精度影響較小。將成果與《低空數字航空攝影測量內業規范》CCZ3003-2010中規定1∶1000成圖時,檢查點誤差的平面位置為1.0 m,高程為0.4 m,及《1∶500 1∶1000 1∶2000地形圖航空攝影測量數字化測圖規范》(GB/T15967-2008)中規定,內業加密點對最近野外控制點的圖上點位中誤差的平面中誤差不得大于0.4 mm, 地物點對最近野外控制點的圖上點位中誤差的平面中誤差不得大于0.6 mm。內業加密點對最近的野外控制點的高程中,誤差丘陵地不得大于0.35 m進行比較。經比較,本次測圖可以滿足規范對1∶1000比例尺成圖要求。通過本試驗區測算,進行1∶1000比例尺成圖,可以間隔900 m~1200 m布設一個像控點。野外像控點的布設數量比普通無人機像控點減少70%左右,節省了大量的外業時間,降低了外業的勞動強度。經本次成圖發現,使用PPK后處理軟件解算POS數據,加上地面少量像控點進行成圖的方法,由于減少了大量的人工刺點的工作,提高了內業的工作效率。
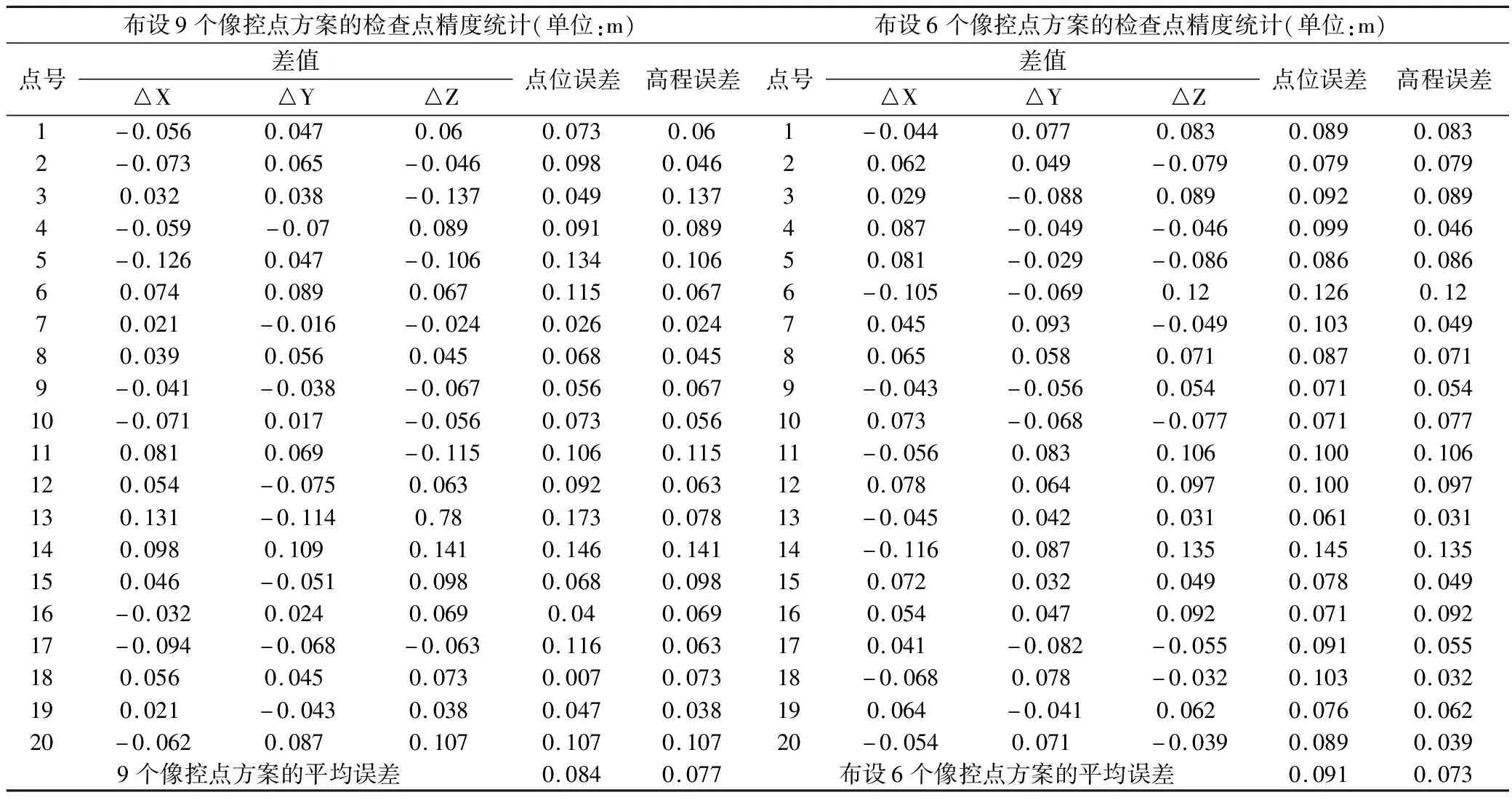
表1 布設9個、6個、3個像控點方案的檢查點精度統計
2.4 地形繪制及施工地違法占地的情況分析
將Pix4D生成的成果導入清華三維地理信息工作站(EPS)中,對影像進行切片工作(生成垂直影像),加載垂直模型,并加載超大影像等一系列處理后,將野外測得被遮擋的地物特征點展繪到CAD中,生成DWG的文件,導入EPS中。在EPS中選擇對應的編碼進行房屋,橋墩等各種地物的繪制,同時繪制施工用地范圍線。高程采用EPS中提取結合野外實測點的方式生成。圖形繪制完成后,運行EPS腳本,輸出CASS格式的圖形。在CAD中根據成圖要求,對圖形進行整飾成圖(圖5),將繪制好的施工用地范圍線與審批的施工用地紅線進行套合,分析施工期間是否違法占用土地。經過分析,施工期間,部分地方超出用地紅線范圍。

圖6 數字線劃圖(DLG)示意圖
3 結語
在傳統的航攝作業方式中,設置像控點是外業過程中最費時費力的環節。以本次測區為例,像帶狀的地形,傳統的測量方式需人工布設 13-16 個像控點。由于地形原因部分像控點布設具有一定難度,而使用精靈 Phantom 4 RTK搭配中海達PPK套裝的測量方案,就可解決這類問題,使作業效率得到了大幅的提升。帶RTK的低空多旋翼無人機在基站選址合理,在外業只需布設少量的控制點,且像片質量、像片重疊度等航攝參數設計合理的情況下,通過UAV-PPK軟件進行解算,能獲得高精度的POS數據,可以滿足小范圍大比例尺測圖需要。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
