鐵路貨車輪軸自動傳輸裝置的設計★
2022-02-28 03:40:24張晉塬齊海強吳文俊
現代工業經濟和信息化 2022年12期
王 興,張晉塬,齊海強,王 歡,吳文俊
(1.太原科技大學計算機科學與技術學院,山西 太原 030024;2.晉西鐵路車輛有限責任公司,山西 太原 030027)
引言
鐵路貨車的輪軸是貨車的重要組成部件,輪軸的新造和檢修都要對其進行一系列嚴格的質檢[1]。隨著科技的快速發展,零件的運輸過程逐步實現無人化和智能化。目前,針對火車輪軸的傳輸裝置,國內外[2]企業和研究人員進行了大量研究。研究成果在方案和應用上都能夠實現火車輪軸的傳輸,且有各自的技術特點。1958年,美國成立了世界上第一家搬運機器人公司,制造了機械手式機器人,1966年,研制出“哈迪曼系統”,2017年FANUC集團在上海展示出4軸機器人,中國第一臺重載機器人由上海交通大學機器人研究所研制出TPR系列機器人。然而,這些設備及方案,存在有自動化程度不高,傳送效率低,設備研制成本較高,通用性不靈活及檢測設備無法實現聯動控制等問題[3]。在檢測過程中我國最常見的運輸方式是通過人力或者搬運機器人(機械手)來完成作業。然而,傳送帶傳輸的速度較低、自動化程度不高,搬運機器人傳輸的距離較短、往返于各個檢測工位相當費時、安全系數較低且兩種運輸方式都需要人工操作輔助來完成,造成了勞動強度過高、檢測效率低、成本大。
1 整體設計
1.1 設備的組成
鐵路貨車輪軸自動傳輸裝置基于物聯網的三層基本架構設計,由感知層(包括光電檢測單元[4]與攝像機單元)、控制單元、通信系統和工作系統(包括電動伸縮導輪裝置、微型電動推桿和傳動小車)等部分組成。
系統在設計上考慮以下特點:一是感知層使用光電檢測單元,通過對被檢測對象發出檢測光線,接收裝置再通過對返回光線的強弱情況或有無對被測物體進行檢測。由此可以判斷火車輪軸實時位置,控制中心根據此位置信息做出控制決策。并配有高清攝像單元由圖像傳感器、外部報警、控制接口等部分組成,可以實現避障、遠程察看等功能。二是利用機器學習算法對攝像機返回的圖像或視頻數據進行智能識別。三是工作層的電動伸縮導輪裝置控制方便,響應速度快可以快速實現自動傳輸小車的裝載和卸載工作,大大提高其運輸效率。轉向結構可以對運輸輪軸實現90°旋轉,以此實現對輪軸不同檢測工位的檢測。四是根據控制系統的功能與指令特點,構建對應的通信層的網絡傳輸協議,滿足實時通信快速控制的需求。
1.2 工作原理設計
首先,自動傳輸小車裝置內設置有四個光電檢測單元,分別安裝于小車托輪架四角處的電動伸縮導輪裝置的周圍,光電檢測單元感知并收集火車輪軸的實時位置信息;其次,高清攝像單元位于自動傳輸小車前端用于感知并探測前方障礙物;然后,控制層與感知層和工作層進行通信,通過接收感知單元和高清攝像單元的信號,識別火車輪軸及的實時位置以及判斷前方是否由障礙物,并根據所感知的位置信息和判障信息,對工作層的各個工作單元發出相應的信號,并以此做出決策;然后,通過電動伸縮導輪裝置與控制器通信連接,用于接收以及控制器通訊連接,當控制器控制電動伸縮導輪裝置伸出時,控制器發出啟動信號,控制器的控制信號以控制導輪的伸出與收縮;最后,利用傳動小車與托輪架固定連接驅動傳動小車運動。轉向裝置安裝于驅動小車主體上方與托輪架固定連接,與控制器通信連接,用以接收控制器的控制信號,將輪軸旋轉90°后置于另外的傳輸小車駛置對應的檢測工位。綜上所述,可以實現對火車輪軸自動傳送到檢測工位進行檢測的功能。
1.3 工藝設計
小車模型設計如圖1所示。該設備自動控制往返原理首先當按下啟動按鈕后,小車通過光電傳感器判斷是否處于初始位置,定位輪軸位置成功之后伸出電動推桿將輪軸固定,處于托輪架的四個電動伸縮導輪伸出由驅動電機驅動小車,在行駛過程中通過攝像頭防撞預警系統以及超聲波雷達測距判斷前方障礙物,若前方有障礙物則停止運行,蜂鳴器報警且將該信息發送到移動設備,待障礙物避開之后,繼續運行將輪軸放到指定工位進行檢測,若此項檢測完成需要進行下一項檢測小車需運行至接軌處與下一小車進行交接,直至將輪軸檢測完成,小車返回初始位置。
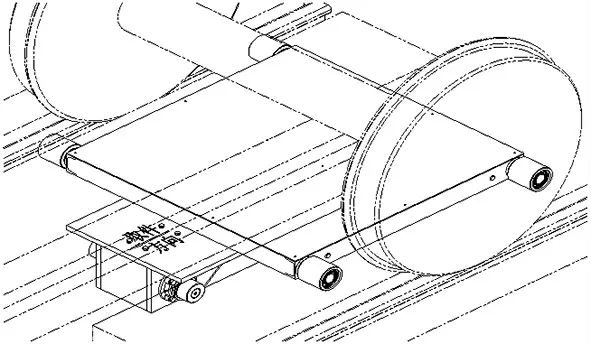
圖1 小車模型
2 硬件設計
2.1 控制器設計
控制器是整個運輸小車系統的核心部分,它將主控電路板、傳感器單元、Wi-Fi模塊、導航器、電動推桿等集成到一起,通過上位機plc對主控制器進行通信。主控制模塊可以分為監測系統模塊和小車控制模塊。小車控制模塊采用Simens的S7-200型PLC,CPU為CPU 226CN。小車控制模塊主要進行數據信息管理、現場遠程分布式I/O控制管理等功能。監控模塊用于實時監控各個對象的運行狀況,實時監控輪軸及轉向架的檢測信息,同時對主控制模塊進行自診斷。
小車控制模塊主要對運輸小車進行取卸貨控制、突發事件控制及提供檢修信息存儲等功能,運輸小車控制系統主要包括西門子S7-200 PLC控制器、PROFIBUS-DP通訊模塊從站模塊EM227及PRB信號模塊處理單元,通過232總線以PPI協議方式與人機界面相連。控制器示意圖如圖2所示。
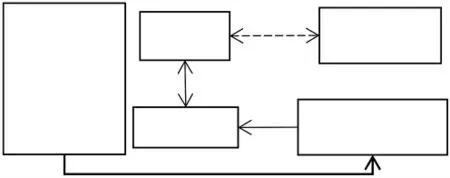
圖2 控制器示意圖
2.2 智能搬運模塊
智能搬運模塊主要是針對小車的突發事件,例如避障信息的處理,以及對輪軸的運輸量進行記錄。
有軌小車尋線模塊。該控制器基于ARIMAX模型結合了GPC算法和PID控制算法,其中GPC算法如式(1)所示:
式中:X(c)表示輸出向量,V(c)表示輸入向量,α(c)表示零均值白噪聲序列;r,k,r階p-1的多項式由Z(p-1),Y(p-1)及U(p-1)表示。
定義目標函數為:
式中:n為最大預測范圍;m為控制范圍且n≥m。
PID增量式控制算法如式(3)所示:
式中:ΔA(c)為PID調控參數;Cu是比例系數;tv是調控時間;t1是積分時間;B(c)為預計輸入與實際輸出的差值;t0是微分常數;ts是采樣時間;Δ=1-p-1是差分算子。
二者整合后可得式(4):
式中:Ga,Ha表示丟番圖方程式;表示靜態增益項。通過PID和GPC二者算法結合得出的系統輸出值可以使小車在尋線過程中穩定運行。
2.3 避障預警模塊
小車采用攝像頭防撞預警系統,該控制是由圖像傳感器、圖像采集模塊、圖像分析處理模塊以及小車報警模塊組成。通過CCD攝像機收集小車前方的圖像信息,利用DSP數字信息處理器對有用的圖像進行分析,識別小車前方的障礙物。
當障礙物距離小車非常近的時候,對于采集的障礙物信息被DSP處理器分析過后,該信號被放大交由單片機分析處理,控制小車的停止以及后退。
2.3.1 小車測距模塊
測距主要通過超聲波測距傳感器獲得信號來實現。在小車四周裝有超聲波傳感器模塊,不斷地發射超聲波,在發射時刻的同時開始計時,途中碰到障礙物后立即返回,超聲波接收器收到反射波后停止計時。
測距的公式表示為:D=VT.
式中:D為測量的距離長度,V表示超聲波在空氣中的傳播速度,T表示測量距離超聲波傳播的時間差。
2.3.2輪軸位置監測模塊
光電檢測開關具有靈敏度高、響應速度快、穩定可靠等特點,滿足實時檢測的系統需求,故本系統選用光電檢測開關作為實時檢測系統。光電檢測開關位于系統的感知層,它是將輸入電流通過發射器轉換為光信號射出,接收器根據被檢測物對光束的遮擋或反射,由同步回路選通電路來進行判斷,并利用通信系統將檢測信號傳輸給控制器。在傳輸機器人的整個工作過程中,光電檢測開關一直處于工作狀態不斷發射出光信號到火車輪軸上,對其實時位置進行檢測,控制中心根據此位置信息做出控制處理。
2.4 系統通信設計
該傳輸設備不僅要滿足運輸輪軸的基本要求,在布線方面也要盡量減少,系統將手持控制器與計算機直接進行無線通訊,可以直接遠程控制小車啟停以及前后移動,計算機與PLC之間實行RS-232/RS485串行通信,控制按鈕、指示燈、蜂鳴器、電動推桿、導航器與PLC之間用有線電纜以節約成本(如圖3所示)。
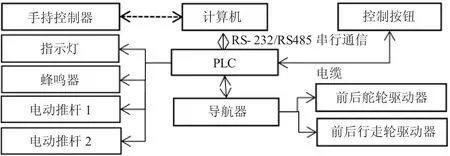
圖3 系統通信設計圖
無線局域網內部通信協議采用IEEE 802.11協議。控制器與服務器、控制器與節點之間通過相應指令進行通信,信息指令內容如下:服務器實時監控各個節點及控制器信息,當小車出現故障后,及時將數據傳送到服務器,并在人機交互界面進行顯示。
4 系統軟件設計
本系統采用visual-basic程序語言設計,不僅要滿足小車運輸輪軸的基本要求而且充分考慮了用戶的便捷性,設置了監控界面、數據記錄、參數設置、故障查詢、用戶權限和遠程控制等多個模塊,用戶可根據系統界面進行操作。監控界面有日期、設備運行狀態、功能按鈕等部分。數據記錄模塊中,小車對當日運輸輪軸的個數進行記錄,用戶可以實時查看運輸工作量。參數設置模塊完成控制器對計算機的無線連接,對設備名稱、IP地址等參數進行設置。故障查詢模塊可以讓檢修人員通過該模塊做出快速判斷并處理,例如小車與人機交互界面連接失敗;小車驅動系統發生故障;運輸小車走到目的地未能減速和定位;微型電動推桿無法伸出與收縮;小車對于前方障礙物無法避障等。
5 結論
貨車輪軸自動傳輸裝置采用PLC技術、雷達測距技術、人機智能交換界面等先進技術,在提高了檢修過程中效率的同時,還避免了因為人工操作失誤造成的成本大的問題。該裝置在我國的投入使用,使得現場工作人員避免了繁忙的體力作業,有效地改善了由勞動強度過高以及在實時檢測輪軸及轉向架的時間段內帶來的人力不足的問題,下一步工作將對運輸不同直徑的輪軸以及轉向方面做出更進一步的優化研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34