國土空間規劃背景下機載雷達航測技術輔助水利景觀規劃研究
2022-03-06 01:07:08賴遠智
城市勘測 2022年1期
賴遠智
(廣州市番禺區城市規劃設計院,廣東 廣州 510000)
1 引 言
隨著國土空間規劃工作不斷推進,越來越多的規劃項目逐步展開,水利景觀規劃作為對城市規劃、城市發展、城市化進程有直接影響的規劃項目顯得愈發重要。人們自古以來喜歡擇水而居,水景在人們心中已經占據了不可動搖的地位[1,2]。然而,水利景觀的打造要考慮諸多問題,豐水期和枯水期的水位變化、上下游水庫對水位的影響、回水水位的變化等都會影響水利景觀的規劃布局,梯級水利景觀的打造雖能有效解決水位變化對造景植物、石材、構造等的影響,但是變高程景觀打造又對各階段水面上下游測繪工作提出更高要求[3,4]。無人機航測技術已普遍用于農業、消防、建筑等諸多行業,航測技術已相對成熟,其測繪過程不受地形地貌限制,其建模精度可通過鏡頭、測繪方法、建模方式的升級優化不斷提高,現已可達到1∶500地形圖測繪精度。針對這一特點,本文將利用無人機航測技術的綜合優勢,以RT濕地公園為例研究無人機航測技術在梯級水利景觀規劃中的具體應用。
2 研究背景及設備選型
RT濕地公園位于廣州市番禺區東南部,該地塊濕地資源條件優越,景區開發條件良好,濕地公園是聚集游客的核心載體、引發消費的重要平臺,是一個區域旅游發展的基礎和前提[5,6,7]。項目區屬亞熱帶海洋性季風氣候,氣溫受偏南季候風影響,暖濕多雨,風力較大,但規劃區待測繪面積不大,因此選用抗風阻較好的多旋翼無人機FM D2000作為航行設備。由于本文研究內容需要針對不同水位的水面上下游地形結構分別測繪,故選用D lidar Ⅱ激光雷達鏡頭作為航測數據采集設備。為進一步提高測繪效率與航測工作可控性,同時選取了地面站控制終端、移動工作站、無人機管家智能系統、RPK-GPS雙定位系統等配合規劃區實勘測繪[8,9]。

圖1 無人機及搭載設備
3 項目區域地形淺析
RT濕地公園規劃范圍,南北總長 2 km,東西平均長度 0.8 km,總面積1.5萬平方米。RT濕地公園瀕臨浮蓮崗水道和沙灣水道交匯口,考慮到匯口匯水及波浪爬高的影響,水位變化較大,在漲潮情況下更為明顯,針對這種情況需針對水位標準下最高水位應分別考慮[10]。因此,本文將h+2.6 m(正常蓄水位)至h+7.0 m(設計洪水位)高程范圍和h+7.0 m以上高程范圍進行初步分區(標準水位h為參照,波浪爬高及潮汐影響為h+a,a為水位抬升值),以便進一步劃分無人機航測主要區域[11]。區域劃分情況如圖2所示。
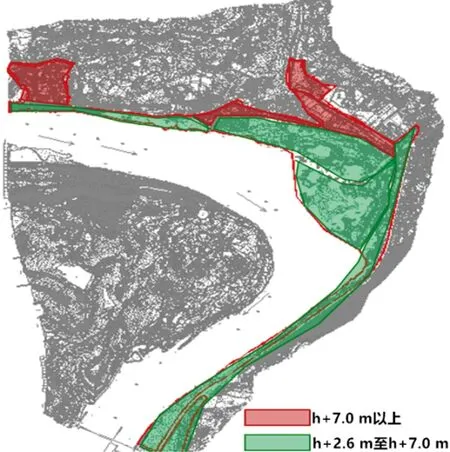
圖2 項目區高程初步劃分示意圖
圖2中,規劃范圍外主要以山地地形為主,規劃范圍以內主要以河灘地為主,h+2.6 m至h+7.0 m高程范圍為正常蓄水位主要影響區域范圍,根據該區域形狀及地塊分布情況,劃定景觀規劃區(即待航測區域)范圍為虛線框內區域。
4 規劃區域航測分析
上文所述景觀規劃區(即待航測區域)下游存在一處攔蓄工程,經過無人機航測,該區域南側邊界距離此攔蓄工程 2.63 km,該區域北側邊界距離攔蓄工程 3.97 km。本文針對該區域內十年一遇洪水標準(P=10%)進行了洪水計算,經計算,上壩址 2.63 km到 3.97 km區間內,最高回水水位分別為h+10.20 m、h+10.66 m。

回水計算成果及淹沒水位 表1
因此,本文將運用FM D2000無人機搭載D lidar Ⅱ激光雷達鏡頭針對梯級水利景觀規劃區進行航測,由于該區域水位高程變化范圍為h+2.6 m至h+10.7 m,故地表高程變化范圍將大于 8.1m,同時,本文研究內容為不同水位變化對地表面積及分布情況所產生的景觀規劃布局變化,故高程測量是測繪的核心內容之一[11]。為保障航測效果,采用V75、V150變高飛行,即無人機以激光雷達鏡頭底端分別距離垂直地面 75 m、150 m進行變高度航測。縱向影像重疊率設定為70%,橫向影像重疊率設定為40%,共采集航測影像682張,通過Pix 4D Mapper平臺進行無人機點云投影建模,可得到實景三維模型,航測期間水位高程h+3.0 m。D lidar Ⅱ激光雷達數據采集可以有效過濾掉植被和水體更好地反映地表結構,但是也無法直觀反映航測區域植被、建筑、影像等的原貌[11,12],為更直觀的分析說明,本文將建筑、植物、地表紋理等模型進行重塑后植入到實景三維成果中,得到實景三維模型效果圖,如圖3所示。

圖3 實景三維建模效果圖

圖4 規劃區剖面位置示意圖
為進一步研究梯級水利景觀規劃區河、灘變化及暗礁(水下地丘)分布情況,本文在實景三維模型選取多個截面進行了剖切分析,限于文章篇幅,本文以A-A剖面為例進行分析說明,A-A剖面位置如圖4所示,A-A剖面縱斷面示意圖(為使剖面更加直觀、形象,已對剖面進行了效果處理)如圖5所示。
由圖5可知,本文所述梯級水利景觀規劃區內的大部分區域位于水庫消落區和正常蓄水位以上灘地區,小部分位于死庫容區。長期處于正常蓄水位以上的灘地約占區域內總面積的50%,主要分布為三大區塊,最核心的區塊位于臨河岸側,該區域地塊相對較大,可利用空間較大;遠離河岸側則以水域為主,基本不具備灘岸規劃條件;河岸與水域之間的其他地塊呈散點狀分布,受河水消落影響較大,其景觀規劃需要結合水位變化、波浪爬高、水利沖蝕等因素綜合考慮[13,14]。
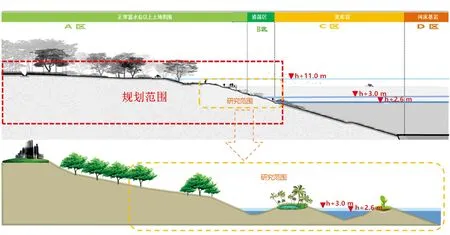
圖5 研究范圍剖面示意圖
5 規劃思路及效果
針對上文研究成果,梯級水利景觀規劃區主要分兩大板塊進行考慮。一部分是河岸灘地片區,該片區長期處于水位線以上,地塊相對較大,可利用空間較大,故以長期休憩的建筑物、商業配套、游戲娛樂設施等需要考慮防洪且占地面積較大的濕地公園配套設施為主;另一部分是島礁地片區,該片區隨著水位線的變化或裸露出水面形成陸地,或被河水淹沒形成暗礁,不適合規劃疏水設施,宜結合地區植被及景觀特色,打造梯級水利景觀[15]。本文將主要圍繞該區域進行梯級水利景觀規劃,針對本文航測成果,結合灘地分布情況及高程范圍對該區域進行規劃布局。具體如圖6所示。
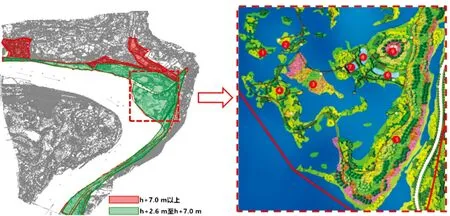
圖6 梯級景觀規劃示意圖
結合上文研究梯級水利景觀規劃區河、灘變化及暗礁(水下地丘)分布情況測繪成果,依托回水灣良好的生態自然本底及生物多樣性,本文所述RT濕地公園梯級水利景觀規劃將以濕地保護與梯級景觀打造為基礎進行規劃。各區域根據不同水域的深淺條件及步行景觀性,將棧道修建成錯落有致、形態各異的游憩步道。為與水位變化形成呼應,實現梯級景觀“一步一景”的效果,不同的景觀節點設置不同特色的景觀臺,以不同親水型鄉土植物為基調,用多層次植物營造疏密有致、韻律感強、空間豐富的河道植物景觀。根據河道不同駁岸形式、主題劃分等以金雞菊,梭魚草,水生美人蕉等植物串聯整個河道,修復水利生態環境、統籌梯級水利景觀。以打造兼具觀景、生態與休閑娛樂功能的景觀島和景觀廊道,實現RT濕地公園梯級水利景觀依水而動、錯落有致。
6 結論與展望
無人機航測技術有效解決了濱水地區測繪工作難于實施、測繪精度難于把控的問題,有效利用了無人機航測不受地形地貌限制、激光雷達數據采集不受水域及植被影響的綜合優勢,有效分析了核心研究區域的陸地、水體交互變化情況,為RT濕地公園梯級水利景觀規劃工作順利展開創造條件,為國土空間規劃工作有序推進奠定基礎,具有較大的研究意義與良好的應用前景。
猜你喜歡
現代裝飾(2021年6期)2021-12-31 05:27:54
小學科學(學生版)(2020年12期)2021-01-08 09:28:10
水利建設與管理(2020年6期)2020-07-08 08:37:34
水利建設與管理(2020年6期)2020-07-08 08:32:40
少年漫畫(藝術創想)(2020年12期)2020-06-09 05:50:08
河南水利年鑒(2020年0期)2020-06-09 05:43:40
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
