基于改進的A*算法機器人導航路徑研究
2022-03-07 02:48:19胡廣雪鄭亞清韓洋祺
國際商業技術 2022年2期
關鍵詞:移動機器人
胡廣雪 鄭亞清 韓洋祺


摘要:針對移動機器人在不同的工作場景不確定性,設計了將相鄰節點優先級分組與Floyd-Warshall算法相結合路徑規劃研究方法。首先,對全局規劃A* 算法相鄰節點優先級分組。其次,綜合環境和路徑的情況以全局路徑的拐點為局部目標點,采用改進的Floyd-Warshall算法進行局部路徑規劃,從而使規劃路徑尋路時間及轉折點次數優于A*算法。最后進行仿真驗證,仿真結果表明:該算法有效解決復雜移動環境的路徑規劃的問題,提高了機器人導航路徑規劃的準確性和魯棒性。
關鍵詞:移動機器人;改進的A*算法;路徑規劃
1.引言
隨著智能制造技術的不斷發展,機器人在在野外探測、工業流水線制造、物流輸送等多個領域廣泛應用。其中,定位和導航系統是研究機器人的核心問題。智能移動機器人系統主要由環境感知、環境邏輯決策及輔助路徑規劃系統組成,且導航路徑規劃是移動機器人性能衡量的重要指標。目前也有一些其他導航定位方法,一些學者采用人工路標定位,但此類定位方法需要提前布置導航的室內場景[1]。[2]通過改進A* 算法的關鍵節點實現了靜態移動環境下的路徑規劃。[3-6]根據已知和未知環境信息進行局部和全局路徑的規劃。[7]提出了基于二次規劃改進的A*算法,但并未考慮移動機器人的體積和偏轉角,實際應用不強。[8]提出跳過節點搜索策略,減少了計算過程中訪問節點數,加快程序的運行速度,但路徑中轉折點仍比較多。采用改進蟻群算法搜索全局路徑點,但搜索節點數據量太大。提高控制程序運算速度,但對行駛路徑的彎曲程度沒有考慮。
針對傳統算法計算量大,由于地下車庫和不同工作廠房復雜不確定性,為了提高智能移動機器人在位置環境中精確性,本文采用改進的A*算法進行智能移動機器人導航路徑規劃,為實現高效率的工作提供實現基礎。
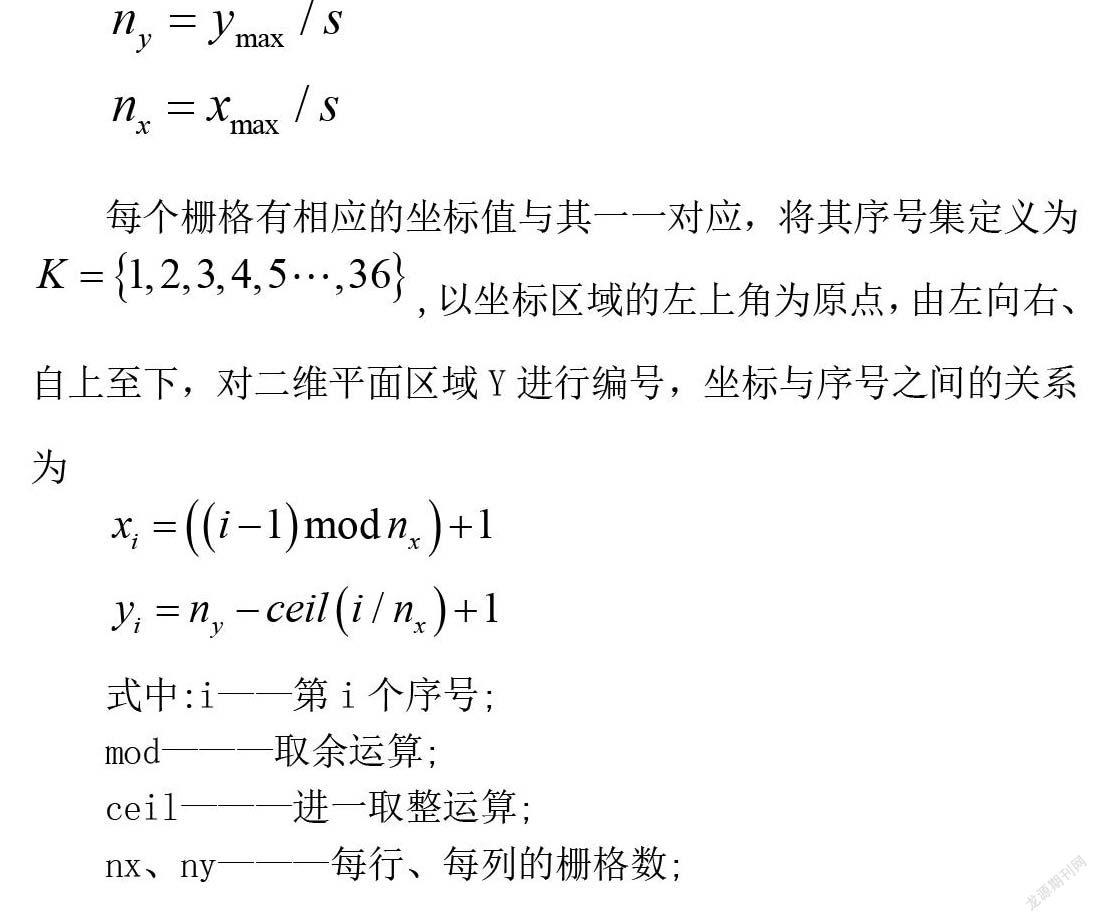
假設智能移動機器人M在有限個障礙物的二維柵格平面區域Y內移動,以Y的左下角為坐標原點,以水平方向為橫坐標x軸,垂直方向為縱坐標y軸,建立如圖1直角坐標系xOy。其中,xmax、ymax分別為橫縱坐標軸方向上的最大值。以移動機器人的步長s對坐標區域進行劃分行和列的柵格數。
每個柵格有相應的坐標值與其一一對應,將其序號集定義為![]() ,以坐標區域的左上角為原點,由左向右、自上至下,對二維平面區域Y進行編號,坐標與序號之間的關系為
,以坐標區域的左上角為原點,由左向右、自上至下,對二維平面區域Y進行編號,坐標與序號之間的關系為
2.改進的A*算法
由于傳統的A* 算法存在運行求解速度較慢,當移動機器人從柵格A移動到柵格B時,考慮到移動機器人有一定的輪廓體積,因此,在紅點處可能會發生碰撞,從而造成移動機器人損壞。對此,本文通過對傳統的A*算法節點的擴展順序進行改進,如圖2所示。設移動機器人當前運動環境節點為O,周圍相鄰節點分別為 A、B、C、D、E、S、W、N。以便降低在實際移動過程中與障礙物發生碰撞的概率,相鄰兩個節點優先分組。
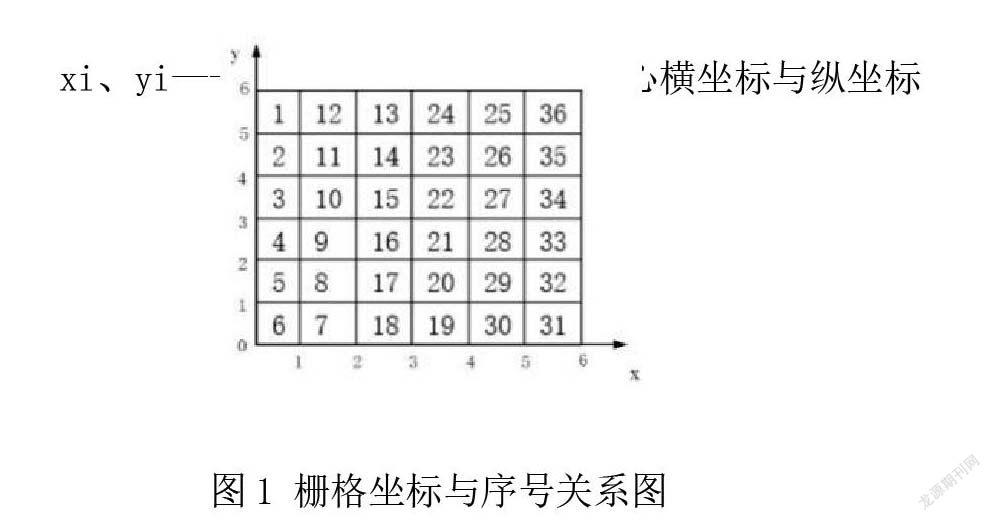
上述方法對A*算法子節點的選擇優化,可以提高移動機器人規劃路徑的安全性,但路徑規劃過程中轉折次數較多,行駛路線的不平滑難度增加很多。針對上述問題問題,在優化選擇子節點的基礎上,將雙向平滑理念引入到Floyd-Warshall 算法中對 A* 算法進行改進,通過建立兩點之間路徑長度的二維數組來計算最短路徑。將雙向平滑理念引入到 Floyd-Warshall 算法中,即在優化正向路徑的基礎上,加入目標點 T 到起始點 K 的反向優化。具體改進步驟如圖3 所示。
針對改進的A*算法優化路徑算法,主要從以下步驟進行仿真驗證:對路徑中同一直線上的中間冗余節點進行刪除,僅保留起始點K、拐點和目標點T。刪除冗余節點后的移動路徑為 K→p1→p2→p3→T。從起點K開始,在保留節點pi、pj之間每q步取一節點,判斷取的節點與上一路徑節點之間是否存在障礙物。若有障礙物,則當前路徑節點不變;若無障礙物,則由程序計算障礙物與節點pi、pj連線的距離。
根據柵格的大小將規劃的路徑安全距離定義為d,當d>dOB時,該路徑可以進行選擇,否則該路徑不可選,加入安全距離后的路徑為K→p33→T。
3.仿真結果驗證
為驗證上述理論分析及改進 A* 算法規劃路徑的有效性,在 Matlab 2010a實驗平臺下分別對傳統的 A*算法。其中 d = 0.8 m,q = 0.1 m,柵格大小為1 m。黑色柵格為障礙物區域,占地圖總面積為19.5%,灰色柵格為遍歷的節點區域,兩組柵格地圖路徑規劃結果如圖4所示。
由仿真的路徑曲線可得,傳統A*算法所規劃的移動路徑存在斜穿障礙物頂點的不足,適應性較差。改進后的A*算法在設定機器人行駛的安全距離后,規劃路徑與障礙物的距離始終大于d,從而避免了移動機器人距障礙物較近而發生碰撞的情況,提高了移動機器人路徑行駛的安全性。基于雙向FloydWarshall改進的A*算法折點的數量較傳統A*算法有所減少,其規劃的移動路徑曲線更加平滑,在實際應用中,有利于減少移動機器人運動過程中的航向角,有效提高移動機器人運動的平穩性和工作效率,具有一定的實用價值。
4.結論
(1)為提高A*算法的運行效率及移動機器人規劃路徑的安全性,提出對子節點的擴展的順序進行優化選擇,將8個領域節點劃分為高級組和一般組,縮短尋優路徑的時間,避免規劃路徑存在斜穿障礙物頂點問題。
(2)針對傳統的A*算法搜索路徑轉折點個數多、路徑曲線不平滑等不足,采用 Floyd-Warshall算法對路徑曲線進行雙向平滑處理,從而減少航向角的次數,改善行駛路徑的質量。
(3)采用Floyd-Warshall算法改進后的的A*算法,符合移動機器人的運動控制,具有實際的使用價值。
參考文獻:
[1]黃露.基于人工路標的室內機器人導航方法研究與實現[D].中國科學技術大學,2017.
[2]王帥軍,胡立坤,王一飛.基于改進D*算法的室內移動機器人路徑規劃[J]. 計算機工程與設計,2020,41(4):7.
[3]Baoye, Song, Zidong, et al. On Global Smooth Path Planning for Mobile Robots using a Novel Multimodal Delayed PSO Algorithm[J]. Cognitive Computation, 2017, 9(1):5–17.
[4]Chen H ,Fei J . UAV Path Planning Based on Particle Swarm Optimization with Global Best Path Competition[J]. International Journal of Pattern Recognition and Artificial Intelligence, 2017, 32(1).
[5]Golda A F ,Aridha S , Elakkiya D . Algorithmic agent for effective mobile robot navigation in an unknown environment[C]// Intelligent Agent & Multi-Agent Systems, 2009. IAMA 2009. International Conference on. IEEE, 2009.
[6]Mohtasham S K , Abbas S . Adaptive Path Planning for Navigation and Sensing of Micro Aerial Vehicles.? 2016.
[7]楊璐, 汪博涵, 張雪潔. 基于A*算法的AGV路徑規劃研究[J]. 公路與汽運, 2014.
[8]Pal A , Tiwari R , Shukla A . Modified A* Algorithm for Mobile Robot Path Planning[M]. Springer Berlin Heidelberg, 2012.
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中國慣性技術學報(2019年3期)2019-10-15 07:21:02
電子測試(2018年15期)2018-09-26 06:01:34
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統學報(2015年4期)2015-12-27 09:38:35
機電產品開發與創新(2014年5期)2014-03-11 16:42:32
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:09
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19