基于奇異譜分解和兩層支持向量機軸承故障診斷方法
2022-03-09 05:37:30湯天寶周志健盧立新
噪聲與振動控制 2022年1期
湯天寶,周志健,張 濤,李 可,盧立新
(1.江南大學 機械工程學院,江蘇 無錫214122;2.江南大學 江蘇省食品先進制造裝備技術(shù)重點實驗室,江蘇 無錫214122)
在實際生產(chǎn)過程中,實時監(jiān)測機械設(shè)備的運行狀態(tài)具有巨大的經(jīng)濟價值。機械設(shè)備發(fā)生故障,輕則停機檢修,重則導致工作人員人身傷害。滾動軸承作為機械傳動部件的重要支撐零件,其狀態(tài)的監(jiān)測尤其重要。滾動軸承一旦出現(xiàn)故障將造成設(shè)備停止工作,往往會帶來無法估量的經(jīng)濟損失。因此,對滾動軸承的診斷研究具有重大的經(jīng)濟價值。由于工業(yè)生產(chǎn)環(huán)境復雜,背景噪聲干擾強,早期故障特征不明顯,提取效果較差,特征提取也就難以實現(xiàn)。因此,如何消除背景噪聲干擾,提取故障特征,顯得至關(guān)重要。
目前,傳統(tǒng)的滾動軸承故障診斷方法以快速傅里葉變換(Fast fourier transform,F(xiàn)FT)為主。短時傅里葉對FFT 進行了改進,雖然在一定程度上解決了FFT 處理非線性信號的局限性,但是在突變信號處易發(fā)生信號丟失現(xiàn)象。小波變換是信號進行時頻處理的工具,在時頻聚集方面具有良好的表現(xiàn),但是在時間和頻率之間無法完成自適應(yīng)。為了完成自適應(yīng),李心一等[1]在FFT 的基礎(chǔ)上,提出了一種將改進的能量算子和自適應(yīng)濾波算法相結(jié)合的方法,實驗結(jié)果顯示在少量訓練樣本情況下該方法具有較高的診斷精度。丁顯等[2]將自適應(yīng)的小波變換技術(shù)應(yīng)用到旋轉(zhuǎn)機械故障診斷領(lǐng)域,通過風電試驗臺故障案例驗證了所提方法的可行性。Bonizzi等[3]提出了一種改進的SSD方法,采用自適應(yīng)法則選取矩陣維數(shù),該方法將強背景噪聲下的原始信號依次分解為若干個頻率不同的SSC 和殘差,每個SSC 表示原信號的局部特征。
隨著人工智能的蓬勃發(fā)展,將智能算法應(yīng)用于故障診斷領(lǐng)域的思路受到廣泛關(guān)注[4]。許多研究者把傳統(tǒng)故障診斷方法與智能算法相結(jié)合,提出了一系列智能軸承故障診斷算法。俞昆等[5]基于多傳感器信息融合提出了一種軸承故障診斷方法,識別率較高。宮文峰等[6]對卷積神經(jīng)網(wǎng)絡(luò)改進,并通過結(jié)合支持向量機(Support vector machine,SVM)構(gòu)建分類算法完成故障分類,應(yīng)用于電機軸承的快速智能診斷,算法識別率高,效果明顯。李華等[7]提出了將優(yōu)化頻帶熵和集合經(jīng)驗模態(tài)分解相結(jié)合的診斷方法,在仿真實驗和實際軸承故障實驗中都取得了較好的診斷結(jié)果。
軸承故障數(shù)據(jù)具有樣本較少,一般樣本集僅僅在100至500左右,維數(shù)較高的特點。SVM在高維、小樣本數(shù)據(jù)分類中表現(xiàn)良好,因此在軸承故障診斷中得到了廣泛應(yīng)用。趙樹延等[8]提出了一種基于偏最小二乘法和支持向量機的故障診斷方法,實驗結(jié)果顯示,該方法具有較高的準確率。姜久亮等[9]基于延拓局部均值分解和SVM 提出了一種智能故障診斷方法,實驗表明該方法能較好進行故障分類。然而由于環(huán)境噪聲等影響造成傳統(tǒng)SVM 對噪聲較為敏感,有時難以表征信號與設(shè)備運行狀況間的復雜映射關(guān)系,導致診斷精度不理想[10]。因此,一種兩層支持向量機的模式識別方法被提出[11],該方法通過建立兩層結(jié)構(gòu)學習模型,挖掘出數(shù)據(jù)的深層特征,以此提高分類準確率。
基于以上分析,一種基于奇異譜分解和兩層支持向量機的軸承故障診斷方法被提出。首先采集信號構(gòu)建信號矩陣,然后對矩陣進行奇異譜分解,得到奇異譜分量。依據(jù)自適應(yīng)峭度準則重構(gòu)信號矩陣,進行特征提取,得到特征向量矩陣作為輸入。通過輸入層對信號訓練,從而獲得淺層信號故障特征,進行降維處理生成新的特征向量矩陣,最后在輸出層完成分類。通過在實驗室風機實驗臺上進行驗證,結(jié)果表明該方法具有良好的診斷性能。
1 奇異譜分解及提取特征向量
1.1 奇異譜分解
作為一種自適應(yīng)信號處理方法,SSD 能將強背景噪聲下的信號依次分解為若干個頻率不同的SSC和殘差分量[12]。具體計算過程如下:
(1)構(gòu)建信號矩陣。對于信號數(shù)據(jù)y(n),選取數(shù)據(jù)長度N和矩陣維數(shù)M,重構(gòu)為M行N列的矩陣Y,矩陣Y的第i行為:

其中:i=1,2,???M,即矩陣:

(2)確定矩陣維數(shù)M。首先,計算第j次迭代殘差分量Vj(n)的功率譜密度(Power spectral density,PSD),殘差分量Vj(n)公式為|:

其中:V0(n)=y(n),j≥2。

通過找到PSD 峰值最大值,估計最大值處對應(yīng)的頻率fmax。在首次迭代中,如果歸一化頻率fmax/Fs≤10-3,殘差將作為重大分量,將M設(shè)置為N3。當j>1,矩陣維數(shù)M=1.2×(fmax/Fs)。
其次,重構(gòu)分量信號j。在首次迭代完成后,如果產(chǎn)生一個重大分量,在滿足Y1=σ1μ1VT1時,只選取第1 個左、右特征向量來獲取g1(n)。否則,當j>1,必須獲得一個分量序列g(shù)1(n)作為時間尺度。在頻譜[fmax-Δf,fmax+Δf]范圍內(nèi),對主峰能量影響最大的特征組,創(chuàng)建子集Ij(Ij={i1,???,ip})。通過對角平均重構(gòu)矩陣YIj=Yi1+???+Yip分量。
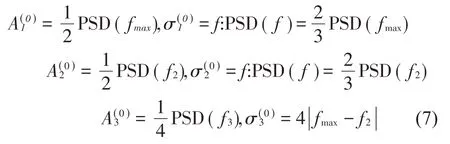
使用3 個高斯函數(shù)之和來模擬該輪廓,以便估計主峰帶寬Δf。每個高斯函數(shù)代表一個譜峰,表達式為:

式中:Ai為第i個高斯函數(shù)的幅值;μi表示位置點;σi為帶寬;θ=[Aσ]T為參數(shù)矢量,滿足A=[A1,A2,A3]和σ=[σ1,σ2,σ3]。
第一個函數(shù)代表主譜峰,對應(yīng)頻率fmax。第二個函數(shù)代表次譜峰,對應(yīng)頻率f2。第三個函數(shù)記錄前2個譜峰之間任意峰值的頻率。依據(jù)此模型得:

為了獲得模型參數(shù)Ai,首先給定擬合的初始值,再對模型進行加權(quán)最小二乘擬合,即:
參數(shù)Ai最優(yōu)值根據(jù)萊文貝格-馬夸特算法確定。主峰帶寬Δf=2.5σ1,σi為設(shè)定的初始值。為了重構(gòu)第j個信號分量,進行第2 次迭代,設(shè)置尺度因子調(diào)節(jié)殘差信號Vj(n)與g(j)(n)的差值,即:

(3)迭代終止條件。將估算出的分量g(j)(n)從原信號中提取出來,以此獲得殘差分量V(j+1)(n)=V(j+1)(n)-(n),計算殘差分量和原始數(shù)據(jù)的歸一化均方差(Normalized Mean Squared Error,NMSE),即:

設(shè)定NMSE的下限閾值0.5%,當計算結(jié)果小于下限閾值,終止迭代;否則,將殘差分量視作輸入信號重復上述迭代過程,即:

式中:m為獲得的分量序列個數(shù)。
1.2 信號重構(gòu)
經(jīng)過SSD 分解后,信號轉(zhuǎn)換為若干個不同頻率的SSC和殘差分量。但如何選取包含有效信息的奇異譜分量成為難點。因此,本文提出一種基于峭度自適應(yīng)準則的SSD 方法[13],該方法能夠自適應(yīng)選取SSC進行信號重構(gòu)。
峭度數(shù)學表達式為:

式中:μ為信號y的均值;σ為信號y的標準差。
通常認為滾動軸承正常運轉(zhuǎn)情況下的信號峭度應(yīng)小于3,而當發(fā)生故障時,SSD 分解后的各SSC 分量對應(yīng)的峭度會增大。為了解決各分量之間峭度差異大的問題,提出一種改進峭度準則[14]。當時,所有滿足條件的分量都將被重構(gòu);當時,依據(jù)峭度大小選取前80%的分量進行重構(gòu);當時,所有分量全部用于重構(gòu),此處可以近似認為信號正常,軸承正常運轉(zhuǎn)。
1.3 提取特征向量
對早期故障沖擊脈沖較為敏感的參數(shù)為峭度、峰值、裕度指標和脈沖指標,其穩(wěn)定性較差;偏斜度和波形因子穩(wěn)定性好,但對早期故障不敏感。因此綜合考慮,提取重構(gòu)信號的波形因子S、峰值C、脈沖因子I、裕度因子CL、偏斜度Cw和峭度Kr,構(gòu)建特征向量U=(S,C,I,CL,Cw,Kr)。
2 兩層結(jié)構(gòu)支持向量機
2.1 支持向量機
對于由N組數(shù)據(jù)組成的訓練樣本集D=,其中,xi∈RM是第i個訓練樣本,yi={-1,1}為樣本標簽。
SVM 的優(yōu)化目標是對超平面wTx+b=0 的分類,如圖1所示。

圖1 SVM最優(yōu)分類線
通過拉格朗日對偶性原則,將分類問題變換為求解拉格朗日因子α的優(yōu)化問題[15]。考慮對誤差的寬容程度,引入懲罰因子C。針對數(shù)據(jù)線性不可分的情況,選擇合適的核函數(shù)κ(?,?) 實現(xiàn)樣本高維特征空間的線性可分,目標函數(shù)為:

由最小最優(yōu)化原則[16]得到優(yōu)化目標α,將其帶入分類函數(shù)中求解,分類函數(shù)為:

2.2 兩層支持向量機
TSVM在訓練過程中獲得高級特征抽象。在此結(jié)構(gòu)中輸入和輸出層均為一個標準SVM,且僅有輸入層和輸出層。訓練樣本經(jīng)輸入層訓練后,搭建與輸出層之間的映射關(guān)系,經(jīng)過輸出層完成分類。
通過對訓練樣本X={(xi,yi)}Ni=1進行降維處理[15],將其放入輸入層訓練,得到一組向量(α1,α2,α3,???,αN)和數(shù)量為Q的支持向量(β1,β2,???,βQ),將對應(yīng)的拉格朗日因子(α1,α2,???,αQ)提取出來,進行信號特征提取,公式為:

其中:βi為支持向量;αi為βi對應(yīng)的拉格朗日因子;yβi為標簽;b為偏置。對于訓練樣本xi∈RN,i=1,2,???,xi經(jīng)過特征提取得到新的樣本x2i:

則原始數(shù)據(jù)xi∈RN變?yōu)閤i∈RQ,將得到的新的訓練樣本作為輸出層的輸入樣本。
對于測試樣本,按照特征公式映射,判別函數(shù)為:

其中:βi為第i個支持向量;ο()表示測試樣本映射后的特征為輸出層的偏置。
2.3 SSD-TSVM故障診斷流程
故障診斷SSD-TSVM算法流程如圖2所示。對滾動軸承振動信號進行SSD處理后得到的不同頻率的信號分量,采用改進的峭度準則進行信號重構(gòu)。計算重構(gòu)信號的多個時域特征指標生成特征矩陣。在第一層SVM 進行“降維處理”,生成新的特征矩陣,最后在第二層SVM完成各種故障類型軸承的分類,計算識別準確率。

圖2 SSD-TSVM故障診斷流程圖
3 西儲大學數(shù)據(jù)驗證
為驗證所提SSD-TSVM 方法的有效性,選用凱斯西儲大學驅(qū)動端軸承的數(shù)據(jù)進行測試、分析,數(shù)據(jù)包括正常、內(nèi)圈故障、外圈故障和滾動體故障狀態(tài)下實驗數(shù)據(jù),軸承參數(shù)如表1所示[17]。其中采樣頻率Fs=12 000 Hz,故障直徑0.007″,電機空載,電機轉(zhuǎn)速1 797 r/min。
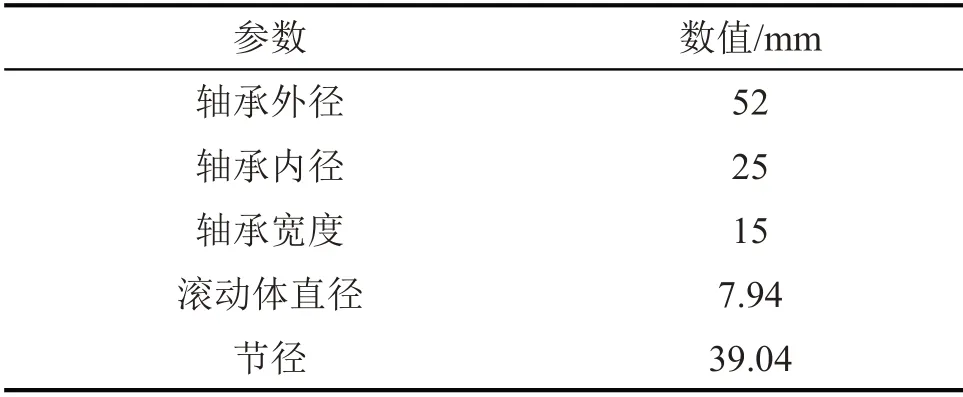
表1 軸承相關(guān)參數(shù)
數(shù)據(jù)驗證選取前10 s的數(shù)據(jù)進行分析。原始信號時域圖如圖3所示。每種故障狀態(tài)下均包含239個樣本,隨機選取70個作為訓練樣本,剩余169個作為測試樣本,得到總訓練樣本數(shù)280,總測試樣本數(shù)676,構(gòu)建TSVM的訓練數(shù)據(jù)集和測試數(shù)據(jù)集。

圖3 原始數(shù)據(jù)信號
計算對應(yīng)特征值,得到特征向量Ui=(Si,Ci,Ii,CL i,Cw i,Kri),i=1,2 ???,120。將訓練樣本輸入TSVM進行分類。實驗中TSVM的核函數(shù)選擇高斯核函數(shù),通過五折交叉驗證獲得核函數(shù)系數(shù)σ和懲罰因子C。其中第一層C=1.5,σ=10,第二層C=2,σ=2.5。分類測試結(jié)果正確率為98.08%。實驗結(jié)果表明該方法具有良好的準確率。
4 實驗驗證
為進一步測試SSD-TSVM 在實際應(yīng)用中的分類效果,用圖4所示實驗平臺采集風機軸承不同狀況下的振動信號,其中包括軸承正常、軸承滾動體故障、軸承外圈故障和軸承內(nèi)圈故障共4種狀態(tài)。

圖4 風機實驗平臺
選用PCBMA352A60型號加速度傳感器采集振動振動信號,傳感器的靈敏度為10 mV/g。軸承如箭頭所指。通過人工線切割方法分別在軸承內(nèi)圈、外圈和滾動體上加工出微小傷痕模擬軸承故障狀態(tài),軸承故障的傷痕大小為0.25 mm×0.7 mm(寬×深)。軸承加工故障實物以及軸承參數(shù)如圖5和表2所示。電機轉(zhuǎn)速分別為1 000 r/min和800 r/min時的2組數(shù)據(jù),采樣頻率設(shè)定為50 kHz,采樣時間為20 s。選取每種狀態(tài)下信號前10 s 采集的數(shù)據(jù)點作為樣本,即樣本數(shù)據(jù)為500 000。每種故障類型包含100個樣本,每個樣本5 000 數(shù)據(jù)點。設(shè)置隨機選取70個樣本作為訓練樣本,剩余30 個樣本作為測試樣本,得到訓練樣本總數(shù)280,測試樣本總數(shù)120,構(gòu)建TSVM的訓練數(shù)據(jù)集和測試數(shù)據(jù)集。
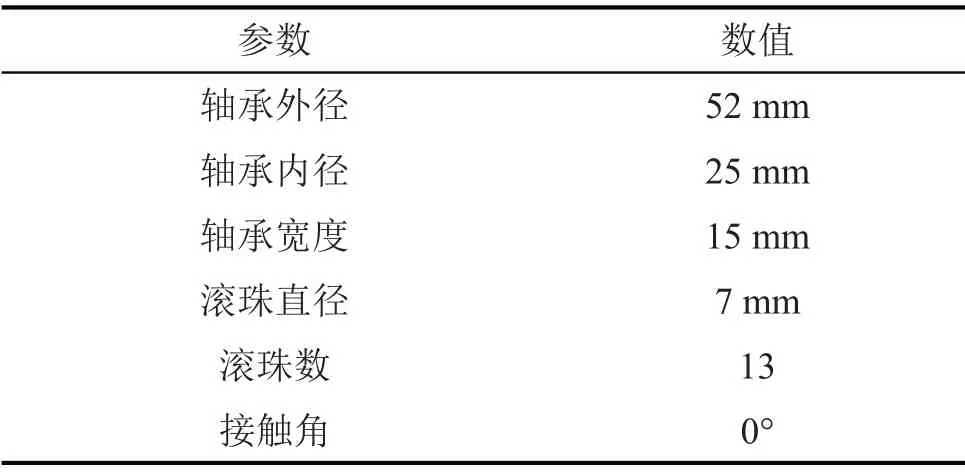
表2 軸承相關(guān)參數(shù)

圖5 故障軸承
對于上述2 組數(shù)據(jù),分別采用原始數(shù)據(jù)結(jié)合支持向量機(SVM),原始數(shù)據(jù)結(jié)合兩層支持向量機(TSVM),奇異譜分解結(jié)合支持向量機(SSVM),經(jīng)驗模態(tài)分解結(jié)合支持向量機(ESVM),經(jīng)驗模態(tài)分解結(jié)合兩層支持向量機(ETSVM)。分類結(jié)果與SSD-TSVM方法進行對比。
實驗中SVM 和TSVM 均選擇高斯核函數(shù)作為核函數(shù)類型,通過五折交叉驗證獲得核函數(shù)系數(shù)σ和懲罰因子C。分別對轉(zhuǎn)速在800 r/min 和1 000 r/min工況下的軸承振動數(shù)據(jù)進行分類。
1 000 r/min數(shù)據(jù)1的各方法及其相應(yīng)的參數(shù):
①SVM(原始數(shù)據(jù))C=2,σ=1;
②TSVM(原始數(shù)據(jù))第一層C=1,σ=1.5;第二層C=25,σ=0.3;
③SSVM中C=1,σ=0.6;
④ESVM中C=1.2,σ=0.2;
⑤ETSVM 第一層C=1.2,σ=0.2,第二層C=1.5,σ=1;
⑥SSD-TSVM 第一層C=3,σ=5,第二層C=5,σ=0.1。
800 r/min數(shù)據(jù)2的各方法及其相應(yīng)的參數(shù):
①SVM(原始數(shù)據(jù))C=2,σ=1;
②TSVM(原始數(shù)據(jù))第一層C=2,σ=0.6,第二層C=4,σ=2;
③SSVM中C=1.5,σ=1;
④ESVM中C=1.4,σ=0.5;
⑤ETSVM 第一層C=2.5,σ=1.2,第二層C=1.5,σ=1;
⑥SSD-TSVM 第一層C=3,σ=5,第二層C=5,σ=0.1。
診斷結(jié)果如表3與圖6所示。
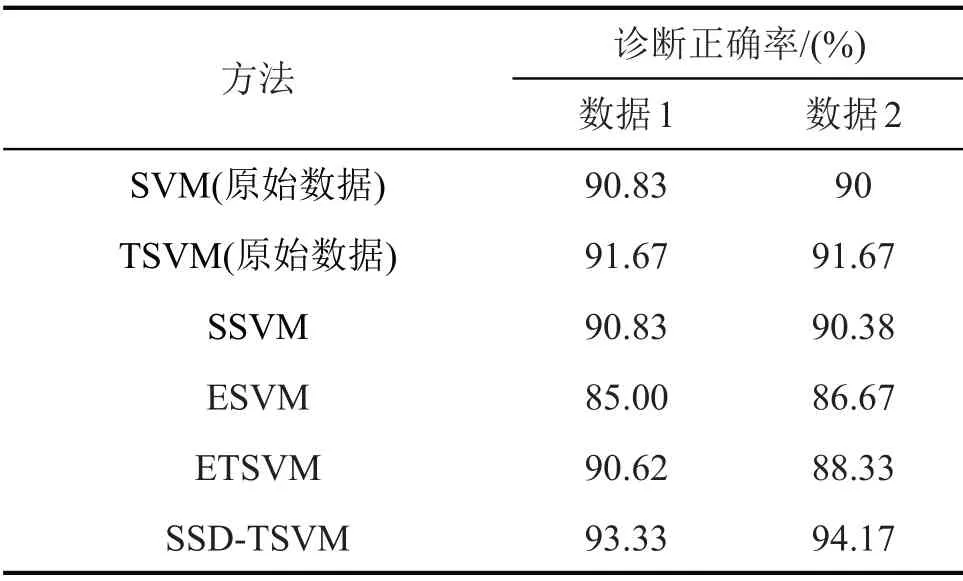
表3 診斷正確率

圖6 故障診斷正確率
從表2與圖6分析數(shù)據(jù)類型1可知,對于原始數(shù)據(jù)使用SVM 與TSVM 的診斷率分別為90.8 %與91.67%,使用TSVM 的診斷率高于SVM;對信號進行SSD與EMD后使用SVM進行分類的診斷正確率分別為90.83 與85%,采用SSD 進行故障診斷識別率明顯高于EMD 與SVM 結(jié)合的診斷識別率;SSDTSVM診斷正確率為93.33%,高于同等條件下對比的所有其余方法。同時,數(shù)據(jù)2分類準確率與數(shù)據(jù)1整體趨勢相同,SSD-TSVM 方法正確率為94.17%。因此,基于奇異譜分解與兩層支持向量機相結(jié)合的故障診斷方法SSD-TSVM具有較高的識別率,能夠有效地完成滾動軸承的故障診斷。
5 結(jié)語
為了解決強背景噪聲的干擾,數(shù)據(jù)量少等問題,一種基于奇異譜分解和兩層支持向量機的軸承故障診斷方法SSD-TSVM 被提出。分別對公開數(shù)據(jù)集和實驗室風機軸承數(shù)據(jù)1 和2 進行驗證。實驗結(jié)果表明,SSD-TSVM方法在小樣本,多分類情形下具有良好的分類結(jié)果,分類準確率分別為98.08 %、93.33%和94.17%。與其他同類型軸承故障診斷方法相對比,SSD-TSVM 方法在各種實驗中都具有較高的準確率。但是測試數(shù)據(jù)集僅在公開數(shù)據(jù)集和風機數(shù)據(jù)集上進行了驗證,其他多種軸承實驗數(shù)據(jù)仍需進一步驗證。
猜你喜歡
數(shù)學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
中學生數(shù)理化·七年級數(shù)學人教版(2019年4期)2019-05-20 10:06:32
中學生數(shù)理化·七年級數(shù)學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
