車載三維激光掃描技術(shù)在道路竣工測量中的應(yīng)用
2022-03-11 13:07:23熊劍飛王扉林宇輝盧其棟
河南科技 2022年1期
熊劍飛 王 扉 林宇輝 盧其棟




摘 要:介紹了車載三維激光掃描技術(shù)在道路工程竣工測量中的內(nèi)外業(yè)處理流程,提出了采用標(biāo)靶點(diǎn)校正的方法以提高車載掃描成果精度,通過生產(chǎn)實(shí)例對該技術(shù)進(jìn)行驗(yàn)證和應(yīng)用。試驗(yàn)結(jié)果表明,利用標(biāo)靶點(diǎn)校正的車載掃描成果能滿足道路竣工測量的精度要求,同時(shí)表明該作業(yè)方法大大提高外業(yè)作業(yè)生產(chǎn)效率。
關(guān)鍵詞:車載三維激光掃描;竣工測量;標(biāo)靶點(diǎn);點(diǎn)云校正
中圖分類號:P225 ? ? 文獻(xiàn)標(biāo)志碼:A ? ? 文章編號:1003-5168(2022)1-0029-04
DOI:10.19968/j.cnki.hnkj.1003-5168.2022.01.006
Application of Vehicle Borne 3D Laser Scanning Technology in Road Completion Survey
XIONG Jianfei1? ? WANG Fei2? ? LIN Yuhui2? ? LU Qidong1
(1.SGIDI Engineering Consulting (Group)Co.,Ltd.,Shanghai 200093,China;2.Guangdong Shunde Central Urban Investment Development Co.,Ltd.,F(xiàn)oshan 528000,China)
Abstract: This paper introduces the? processing flow of on-board 3D laser scanning technology in road engineering completion survey, puts forward the method of target point correction to improve the accuracy of on-board scanning results, and verifies and applies the technology through production examples.The experimental results show that the vehicle scanning results of target point correction can meet the accuracy requirements of road completion survey, and this operation method greatly improves the production efficiency of field operation.
Keywords:vehicle 3D laser scanning;completion survey;target point;point cloud correction
0 引言
為滿足城市升級、促進(jìn)區(qū)域經(jīng)濟(jì)發(fā)展,以及居民出行的需要,提升城市路網(wǎng)功能已迫在眉睫,國內(nèi)各大城市掀起了新一輪道路提升改造工程,以提高城市內(nèi)主干道道路通行能力。
道路改造前后均應(yīng)對其現(xiàn)狀進(jìn)行測繪。傳統(tǒng)測量模式主要依靠人工進(jìn)行外業(yè)數(shù)據(jù)采集,改造道路多為城市核心路網(wǎng),交通流量大,為保證測量人員的安全,采集時(shí)須申請臨時(shí)交通管制,極易導(dǎo)致主干道交通堵塞;傳統(tǒng)模式還存在外業(yè)工作量大、數(shù)據(jù)采集量少、效率低、成本高、成果易錯(cuò)漏等缺點(diǎn),因此,亟須引入測繪新技術(shù)提高測繪效率。
車載三維激光掃描系統(tǒng)集成多傳感器和多源數(shù)據(jù),可實(shí)現(xiàn)對道路全方位信息的快速、自動(dòng)獲取,具有掃描速度快、數(shù)據(jù)信息量大、精度高、采集過程安全簡單、節(jié)省人力等優(yōu)點(diǎn),該項(xiàng)技術(shù)能極大提高外業(yè)生產(chǎn)效率,有效降低生產(chǎn)成本。數(shù)據(jù)經(jīng)處理后可以獲得道路實(shí)景三維數(shù)據(jù),實(shí)現(xiàn)道路各項(xiàng)信息的全面提取[1],因此車載三維掃描系統(tǒng)逐漸被應(yīng)用于公路測量的驗(yàn)收階段。
1 車載三維激光掃描測量
車載三維掃描系統(tǒng)(見圖1)是多種測量技術(shù)和傳感器的集成,包含三維激光掃描儀、定姿定位態(tài)設(shè)備(POS系統(tǒng))、GNSS接收機(jī)、全景攝像儀等。系統(tǒng)運(yùn)行過程中POS系統(tǒng)及GNSS接收機(jī)記錄掃描過程中車輛的位置及姿態(tài),激光掃描頭及全景相機(jī)同步獲取三維點(diǎn)云及全景影像。點(diǎn)云及影像經(jīng)一系列處理后,形成具有絕對定位坐標(biāo)的彩色整體點(diǎn)云,通過點(diǎn)云提取道路的縱橫斷面及中線信息。同步記錄的全景影像具有對道路現(xiàn)狀彩色信息進(jìn)行全方位、多次、多角度查看的功能,有利于地物的判別與繪制[2]。
2 技術(shù)流程
移動(dòng)三維激光掃描技術(shù)流程主要分為測量準(zhǔn)備、數(shù)據(jù)采集和數(shù)據(jù)處理三部分。
2.1 測量準(zhǔn)備
測量準(zhǔn)備主要包括基站選址、路線規(guī)劃。在道路工程的中間區(qū)域選擇視野開闊、周邊無遮擋的區(qū)域架設(shè)測量基站;熟悉測區(qū)的交通狀況和路線走向,選擇合適的時(shí)段規(guī)劃合理的路線。
2.2 數(shù)據(jù)采集
數(shù)據(jù)采集前,將車載系統(tǒng)靜置5~10 min,使慣導(dǎo)系統(tǒng)姿態(tài)初始化,結(jié)束時(shí)也要靜置。初始化后,車載系統(tǒng)采用20 km/h進(jìn)行定速巡航。在采集過程中,若遇較長時(shí)間停車,可暫停掃描,在車子啟動(dòng)前開啟掃描,盡量減少停車過程的數(shù)據(jù)冗余。遭遇GPS信號失鎖路段,應(yīng)盡快通過,減小點(diǎn)云精度的損失。
測量基站在車載設(shè)備啟動(dòng)前開機(jī),全程同步觀測。同步觀測數(shù)據(jù)用于對車載GPS采集的三維坐標(biāo)進(jìn)行后差分,以提高最終三維點(diǎn)云成果的坐標(biāo)精度。
2.3 數(shù)據(jù)處理
數(shù)據(jù)處理主要包括數(shù)據(jù)預(yù)處理和后處理。
2.3.1 數(shù)據(jù)預(yù)處理。掃描后點(diǎn)云數(shù)據(jù)預(yù)處理主要包括POS位置解算、點(diǎn)云融合解算。
①POS解算。定姿定位系統(tǒng)(Position and Orientation System,POS)解算主要是用基站數(shù)據(jù)、車載移動(dòng)站GPS數(shù)據(jù)及慣性導(dǎo)航系統(tǒng)(Inertial Navigation System,INS)數(shù)據(jù)組合解算,并輸出高精度的軌跡數(shù)據(jù),用于下一步將軌跡和點(diǎn)云數(shù)據(jù)進(jìn)行融合獲取高精度點(diǎn)云數(shù)據(jù)。
②點(diǎn)云融合解算。車載激光掃描系統(tǒng)記錄了各個(gè)傳感器的測量數(shù)據(jù),將這些數(shù)據(jù)根據(jù)各個(gè)傳感器的時(shí)序和位置參數(shù)進(jìn)行配準(zhǔn)與融合,還原測量目標(biāo)的三維幾何空間坐標(biāo)和屬性。
2.3.2 數(shù)據(jù)后處理。車載激光掃描數(shù)據(jù)后處理包括點(diǎn)云分類、特征線提取、地形圖繪制及橫縱斷面制作等。
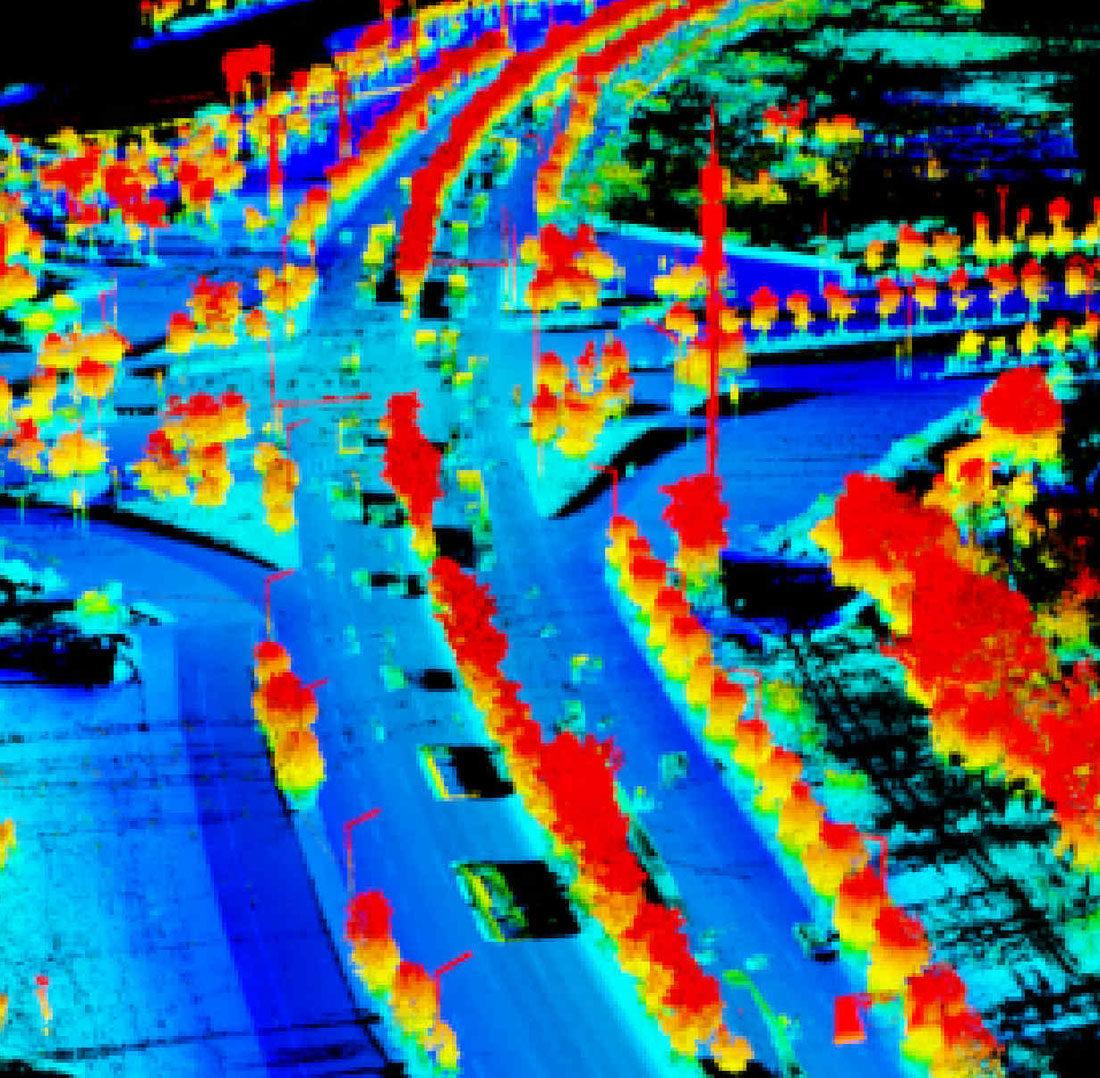
①點(diǎn)云分類。對抽稀后的三維激光點(diǎn)云數(shù)據(jù)進(jìn)行點(diǎn)云粗分類、點(diǎn)云自動(dòng)分類、點(diǎn)云精分類,準(zhǔn)確判斷地面點(diǎn)、非地面點(diǎn)及橫縱斷面所需的地物特征(中央綠化隔離帶、行車道路邊緣路肩等)[3],減少冗余數(shù)據(jù),避免道路兩旁點(diǎn)云數(shù)據(jù)、植被點(diǎn)云數(shù)據(jù)、護(hù)欄點(diǎn)云數(shù)據(jù)、頂部架橋等點(diǎn)云數(shù)據(jù)干擾測量成果,便于后期的道路橫縱斷面作業(yè)處理工作[4],如圖2、圖3所示。
②特征線提取。基于處理好的三維激光點(diǎn)云,利用三維激光點(diǎn)云地形地籍成圖軟件提取道路特征矢量線即道路行車道邊緣線,并根據(jù)邊緣線擬合道路中心線,制作縱斷面。
③地形圖繪制、橫縱斷面制作。利用三維激光地形地籍成圖軟件基于點(diǎn)云數(shù)據(jù)進(jìn)行地形圖繪制。按逐樁里程進(jìn)行斷面提取,制作橫斷面。
3 工程案例
佛山市某道路改造提升工程總體呈東西走向,路線全長8.14 km(其中樁號K2+150~K2+380以及樁號K3+140~K4+620為現(xiàn)狀橋梁段),道路寬60 m,雙向六車道,為佛山市主干道。
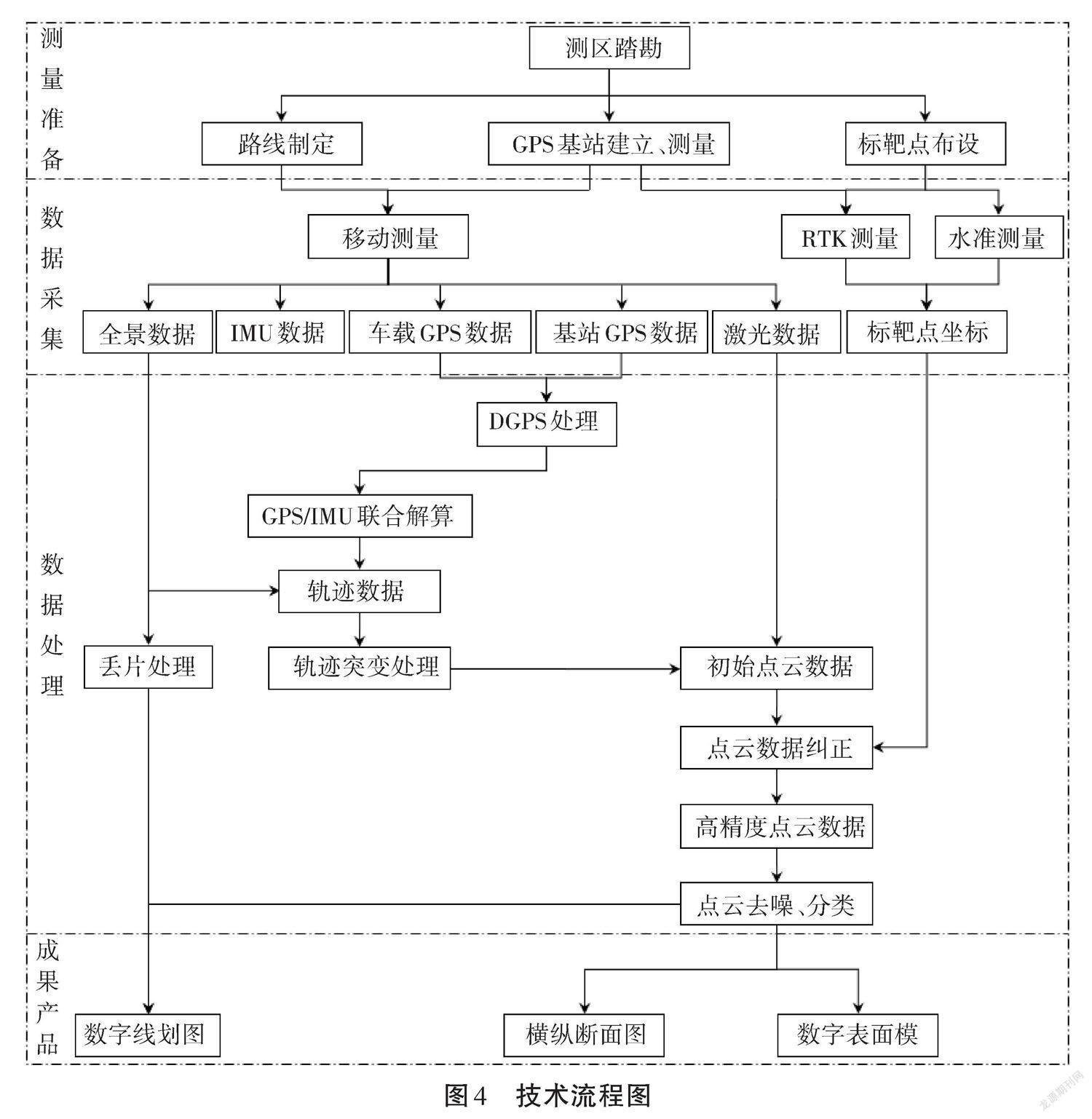
通過結(jié)合道路竣工測量工程實(shí)踐,實(shí)現(xiàn)了車載三維激光掃描技術(shù)在道路工程竣工測量中的應(yīng)用,提出采用標(biāo)靶點(diǎn)進(jìn)行點(diǎn)云數(shù)據(jù)糾正,提高成果精度,利用傳統(tǒng)測量方法驗(yàn)證車載三維激光掃描測量的成果精度,技術(shù)流程圖見圖4。
本項(xiàng)目的車載激光三維掃描系統(tǒng)以汽車為移動(dòng)載體,集成安裝了高精度定姿定位系統(tǒng)、3 000萬像素六鏡頭Ladybug5全景相機(jī)、Riegl VUX-1UAV激光掃描頭、GNSS接收機(jī)及同步控制單元。
3.1 測量準(zhǔn)備
掃描前進(jìn)行標(biāo)靶布設(shè),標(biāo)靶位置設(shè)置在左右行車道靠外側(cè)較明顯的位置;在十字路口路段,標(biāo)靶點(diǎn)盡量布設(shè)在左右行車道可通視的位置;約200 m間隔布設(shè)1對或1個(gè)標(biāo)靶點(diǎn),標(biāo)靶點(diǎn)噴繪白色漆,實(shí)際布設(shè)43個(gè)標(biāo)靶點(diǎn)。標(biāo)靶平面坐標(biāo)采用三級GNSS進(jìn)行測量,高程采用四等水準(zhǔn)的觀測方法進(jìn)行測量。
本道路為雙向六車道的城市主干道,中間有隔離綠化帶,單幅掃描無法獲取道路的所有信息,因此左右幅均須規(guī)劃行駛路線。為避免因車流遮擋標(biāo)靶點(diǎn),選擇車流量相對較少的上午10:00—12:00進(jìn)行數(shù)據(jù)采集。
3.2 數(shù)據(jù)采集
按2.2中的操作流程進(jìn)行采集,采集全程用時(shí)2 h,而傳統(tǒng)測量外業(yè)采集需5~7 d,兩者外業(yè)效率相差很大。
3.3 數(shù)據(jù)處理
3.3.1 點(diǎn)云糾正處理。按一般流程進(jìn)行點(diǎn)云預(yù)處理,平面、高程精度可達(dá)5~10 cm,局部區(qū)域存在10 cm以上偏差,成果精度略有不足。采用標(biāo)靶點(diǎn)對掃描點(diǎn)云進(jìn)行糾正處理,以改進(jìn)車載激光掃描系統(tǒng)的成果精度。
通過強(qiáng)度顯示判別標(biāo)靶點(diǎn)(見圖5)圓心位置。導(dǎo)入標(biāo)靶點(diǎn)實(shí)測坐標(biāo),選取點(diǎn)云中校正標(biāo)靶點(diǎn)的同名點(diǎn),對軌跡數(shù)據(jù)進(jìn)行平差改正,將軌跡數(shù)據(jù)糾正(見圖6),完成后重新進(jìn)行點(diǎn)云融合處理生成糾正后的點(diǎn)云數(shù)據(jù)。
3.3.2 數(shù)據(jù)檢查。需要檢查的數(shù)據(jù)如下。
①點(diǎn)云密度及完整度檢查。對掃描點(diǎn)云的密度進(jìn)行檢查,點(diǎn)云呈線性,線間距為1~3 cm。點(diǎn)云無缺漏,能完整包含兩幅道路信息。
②點(diǎn)云重疊度檢查。在無中央隔離帶的左右幅通視路段,掃描時(shí)有重疊,兩次掃描的精度差在2 cm左右;點(diǎn)云數(shù)據(jù)能較好地套合在同一水平線,高程離散度較小。
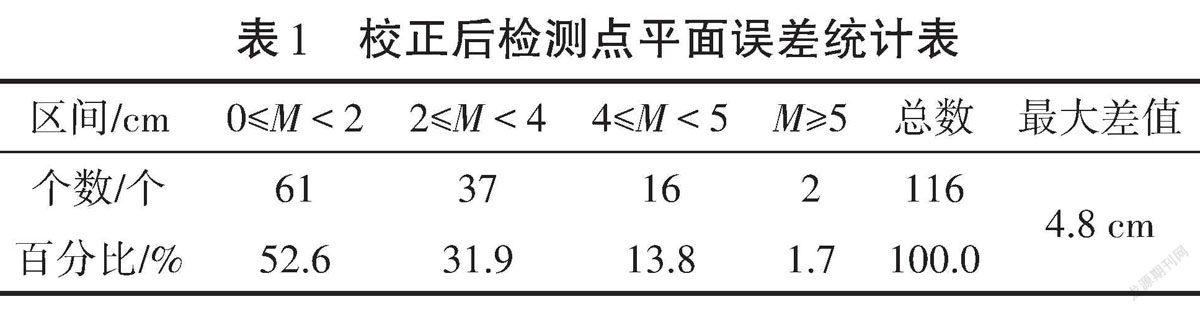
③點(diǎn)云精度檢查。為檢查點(diǎn)云的絕對精度,采用傳統(tǒng)測量方式測量部分明顯地物特征點(diǎn)73點(diǎn)及原有標(biāo)靶控制點(diǎn)43點(diǎn),共計(jì)116點(diǎn)。
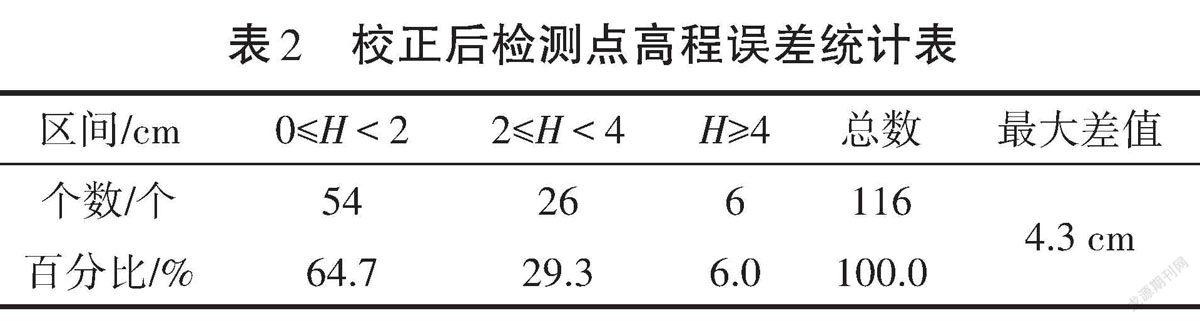
對校正后的誤差進(jìn)行統(tǒng)計(jì),詳見表1和表2。
通過表1和表2得出,經(jīng)校正后的點(diǎn)云精度滿足道路竣工驗(yàn)收精度要求。查看平面誤差、高程誤差偏大點(diǎn),多位于橋梁段、陡坡等高程突變區(qū)域附近。
3.3.3 數(shù)據(jù)生產(chǎn)。利用校正后的點(diǎn)云進(jìn)行道路特征線提取及縱橫斷面提取。
4 結(jié)語
本文采用車載三維激光掃描技術(shù)進(jìn)行道路改造提升工程的竣工測量,三維掃描測量系統(tǒng)在未添加標(biāo)靶點(diǎn)的情況下,平面和高程精度在5~15 cm。采用標(biāo)靶點(diǎn)校正后,點(diǎn)云數(shù)據(jù)的點(diǎn)位中誤差及高程中誤差明顯變小,精度明顯提高,校正后的成果可以滿足道路竣工測量的需求。
參考文獻(xiàn):
[1] 盧啟生,王愛俊,張學(xué)廣,等.移動(dòng)三維激光掃描與全景影像技術(shù)在公路修繕設(shè)計(jì)中應(yīng)用探索[J].工程勘察,2018(10):52-55.
[2] 王克峰,平世越.車載三維激光掃描系統(tǒng)在公路斷面測量中的應(yīng)用[J].測繪與空間地理信息,2018(8):195-197.
[3] 石波.車載激光點(diǎn)云地面濾波與道路識別方法研究[D].青島:山東科技大學(xué),2017.
[4] 徐寧,聶倩.利用車載三維激光測量系統(tǒng)進(jìn)行城市道路竣工測量[J].測繪與工程勘察,2014(3):70-72.
收稿日期:2021-10-28
作者簡介:熊劍飛(1980—),男,本科,高級工程師,研究方向:軌道交通工程測量及工程測量。
3542500338280
