基于開關時刻修正的多模式調制切換策略
2022-03-11 07:18:28苑國鋒
電工技術學報 2022年5期
苑國鋒 沈 陽
基于開關時刻修正的多模式調制切換策略
苑國鋒1,2沈 陽1
(1. 北方工業大學電氣與控制工程學院 北京 100144 2. 變頻技術北京市工程研究中心 北京 100144)
電力牽引傳動系統通常采用多模式調制策略。為了解決調制模式之間切換產生的電流和轉矩沖擊問題,該文對調制模式切換引起的定子磁鏈偏差進行研究,提出一種通用多模式調制切換策略。該策略通過分析改變開關時刻對兩相靜止坐標系下定子磁鏈的影響,計算出各相開關時刻的補償幅度對定子磁鏈偏差進行補償,從而實現多模式調制的平滑切換。該策略直接對定子磁鏈偏差進行補償,不受具體調制方式和電機參數約束,可實現任意時刻無沖擊切換。仿真和實驗驗證了定子磁鏈偏差補償策略的通用性和有效性。
多模式調制 轉矩沖擊 切換方法 定子磁鏈偏差 開關時刻修正
0 引言
電力牽引傳動系統具有電壓高、功率和電流大的特點,同時受到散熱系統體積的限制,目前使用的牽引變流器的開關頻率只有幾百赫茲[1-5]。這對逆變器的脈沖寬度調制(Pulse Width Modulation, PWM)方法提出了更高的要求。具體表現為以下兩點:①電力機車在運行過程中速度范圍較寬,這將導致載波比大幅度變化,因此需要采用多種不同的調制方法以滿足不同運行速度的要求;②需要實現不同的調制模式之間或者相同調制模式不同載波比之間的平滑切換,保證系統的平穩運行。
對于低載波比工況的調制模式,國內外學者已進行了大量的研究,提出了多種PWM理論及實現方法,并進行了優化,包括同步空間矢量PWM(Synchronized Space Vector PWM, SS-VPWM)、特定諧波消除PWM(Selected Harmonic Eliminated PWM, SHEPWM)和電流諧波最小PWM (Current Harmonic Minimum PWM, CHMPWM)等。實際應用中,根據各種調制方法的優缺點,采用多模式PWM方法。同時為確保系統的穩定運行,需要通過特定的切換策略保證系統在不同調制模式之間平滑過渡。
文獻[6]提出一種SHEPWM的三相同步切換的策略,通過分析不同脈沖數的電流諧波特性,選擇諧波沖擊最小的點進行三相同步切換,但不同切換過程的電流諧波特性均不相同,分析相對復雜。文獻[7-8]分別提出了基于電機定子磁鏈的SHEPWM和CHMPWM切換策略,通過圖解法分析切換前后定子磁鏈軌跡,選擇最接近兩個磁鏈軌跡交點的位置進行切換,實現簡單,但圖解法只是從宏觀上近似地判斷最優切換點,并沒有對具體的切換點性能進行分析。文獻[9]提出一種通用的多模式調制策略切換方法,通過對比不同PWM策略的諧波磁鏈特性,選擇定子磁鏈幅值和相位偏差最小點進行切換,該策略具備較好的通用性。上述文獻均采用離線計算選擇最優切換點的方法進行脈沖模式切換,在實際應用過程中存在以下局限性:①離線計算的固定切換點對應著固定的電壓基波相位,若切換瞬間的電壓指令不在最優切換點時刻,則需要等待最優切換點時刻才可進行切換;②即使是在最優切換點時刻定子磁鏈仍可能存在較小偏差,如果不進行合適的補償,會使得模式切換后定子磁鏈軌跡在一定程度上偏離穩態優化磁鏈軌跡,產生轉矩和電流沖擊。
本文對調制模式切換引起定子磁鏈偏差的過程進行詳細分析,提出一種通過改變開關時刻修正因調制模式切換引起的定子磁鏈偏差的多模式調制切換策略。該方法可以改善傳統選擇最優切換點方法的性能局限,實現調制模式在任意時刻無沖擊的切換。該策略不依賴具體的調制方式和電機參數,具有較好的通用性。對本文所提出的切換策略進行了仿真和實驗,結果驗證了該方法的正確性和有效性。
1 多模式調制切換的定子磁鏈偏差
多模式調制策略的切換需要保證切換前后不出現電流和轉矩的沖擊[10-15]。牽引電機控制系統中,更為重要的是對輸出轉矩的控制。由文獻[9]可知,當切換前后電機轉矩平穩輸出時,電流不會出現沖擊,因此調制模式之間平滑切換的目標是保證在調制模式切換前后電機轉矩能夠平穩輸出。以異步電機為例,其轉矩輸出表達式為

若不考慮參數變化,電機的輸出轉矩特性主要由轉子磁鏈、定子磁鏈及定轉子磁鏈夾角三個因素決定。由于轉子時間常數較大,電機轉子磁鏈可以認為是一個理想的圓形,而定子磁鏈則包含不同次數的諧波,諧波將導致定子磁鏈偏離理想磁鏈圓。定轉子磁鏈軌跡如圖1所示。圖1中,異步電機從靜止加速至方波工況的過程中,轉子磁鏈基本保持理想的圓形,而定子磁鏈則出現不同程度的畸變。因此在不考慮參數變化時,電機輸出轉矩脈動主要取決于定子磁鏈的幅值和相位變化。
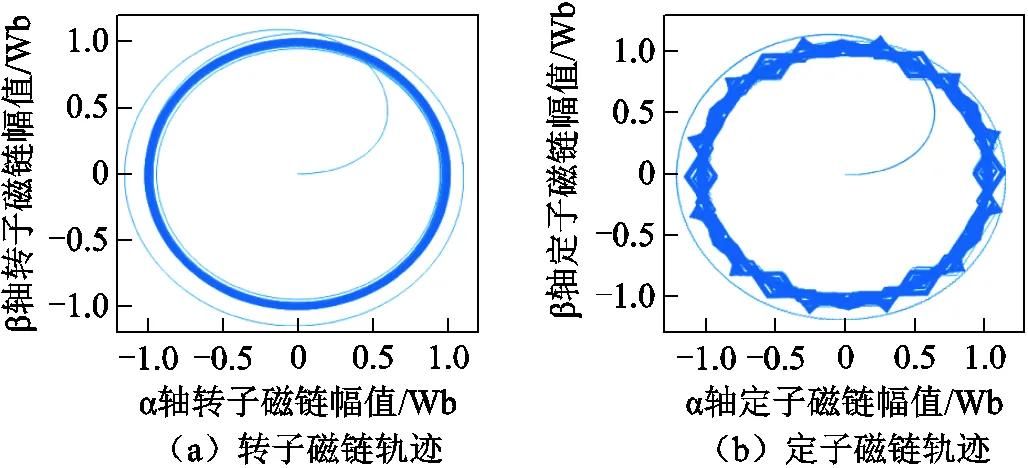
圖1 定轉子磁鏈軌跡
同步調制在穩態運行工況下存在與開關時刻表格相對應的穩態優化定子磁鏈,電機穩態運行時電機定子磁鏈一直沿穩態優化磁鏈軌跡運動,若電機定子磁鏈偏離穩態優化磁鏈軌跡,電機轉矩將會出現振蕩[14]。在調制模式發生切換過程中,切換時刻更換開關序列(,)將導致定子磁鏈出現動態偏差,使得定子磁鏈在切換后無法在穩態優化磁鏈軌跡運行,轉矩出現沖擊,其中為調制度,為對應脈沖數。假設1為初始時刻,此時調用的開關序列為(1)(,1),上標(1)表示調制模式切換前物理量。電機定子磁鏈沿(1)(,1)對應的穩態優化磁鏈軌跡(1) ss()運行,下標ss代表穩態值,表達式為
式中,(1)ss為(1)對應的穩態定子電壓;(1) ss(1)為定子磁鏈初值。
若在2時刻發生調制模式切換,要求調用的開關序列變為(2)(,2),上標(2)表示調制模式切換后物理量。調制模式變化后定子磁鏈表達式為
式中,(2)ss為(2)(,2)對應的穩態定子電壓;(1) ss(2)為(1) ss()在2的定子磁鏈,是計算(2) s()的初值。對于開關序列(2)(,2),同樣具備穩態優化磁鏈軌跡(2) ss(),其表達式為

式中,(2)ss(2)為穩態優化磁鏈軌跡(2) ss()在=2的定子磁鏈。由于(1)(,1)和(2)(,1)所對應的穩態優化定子磁鏈不相同,即(1) ss(2)≠(2) ss(2)。因此在>2時,實際定子磁鏈(2) s(2)將偏離切換后穩態優化軌跡(2) ss(),產生式(5)所示的動態定子磁鏈偏差D()。

以三脈沖SHEPWM切換至五脈沖SHEPWM的過程為例進行分析,定子磁鏈動態示意圖如圖2所示。圖2a中虛線為五脈沖SHEPWM穩態優化定子磁鏈軌跡,實線為三脈沖SHEPWM穩態優化定子磁鏈軌跡。
如果三脈沖SHEPWM在圖2a中A點處切換至五脈沖SHEPWM,切換過程電機定子磁鏈的運行軌跡將如圖2b所示,圖中實線為電機實際運行磁鏈軌跡,虛線為五脈沖SHEPWM對應的穩態優化定子磁鏈軌跡。切換后定子磁鏈的起點為三脈沖SHEPWM在切換瞬間的定子磁鏈A點,B點為五脈沖SHEPWM穩態優化磁鏈軌跡上與A點基波相位相同的定子磁鏈,AB兩點之間存在定子磁鏈偏差。調制模式切換后,電機實際定子磁鏈將偏離五脈沖SHEPWM的穩態優化磁鏈軌跡,從而造成轉矩和電流沖擊。因此需要對定子磁鏈偏差進行補償,保證切換前后的系統在兩種穩態優化磁鏈軌跡之間平滑過渡。
2 基于開關時刻修正的定子磁鏈偏差補償策略
對于電機控制系統,每一個采樣控制周期都會輸出一個參考電壓指令,參考電壓指令對應的開關序列(,)會在下一個采樣周期在逆變器產生作用。當忽略定子壓降時,定子電壓的積分等于定子磁鏈,而定子電壓由施加在三相逆變器上的PWM脈沖決定。因此依據具體的定子磁鏈偏差,提前對開關時刻進行修正,可對調制模式切換產生的定子磁鏈偏差進行補償,使得電機在切換前后兩種穩態優化磁鏈軌跡之間平穩過渡,實現調制模式平滑切換的目的。圖3為進行定子磁鏈偏差補償的原理框圖。
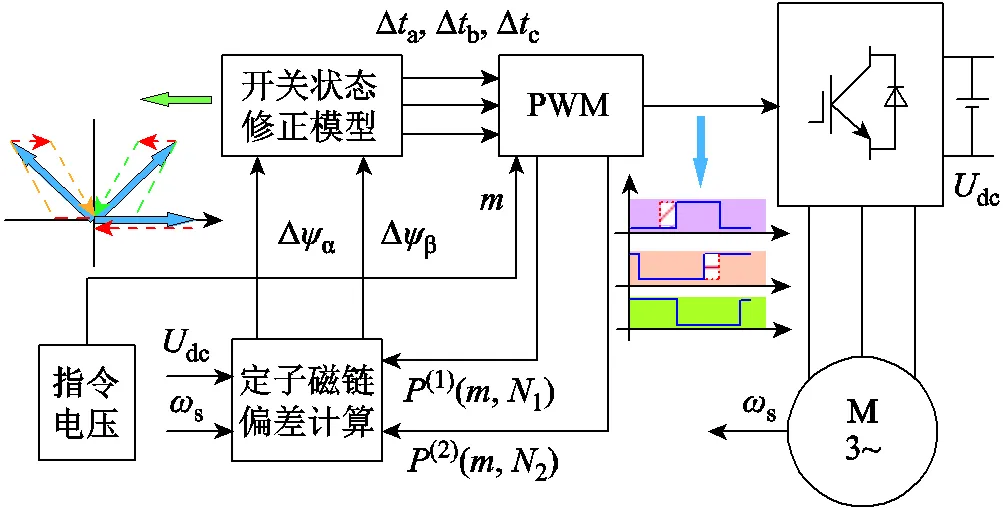
圖3 定子磁鏈偏差補償原理框圖

2.1 定子磁鏈偏差計算
調制模式切換導致的定子磁鏈偏差的準確計算是實現定子磁鏈偏差的精確補償的前提。根據約束目標不同,不同調制模式對應的開關序列不同,每個開關序列都存在特定的穩態優化磁鏈軌跡。在電機穩態運行時,電機定子磁鏈軌跡按各個開關序列對應的穩態優化磁鏈軌跡運行。從定子磁鏈的角度考慮,調制模式切換是兩種穩態優化定子磁鏈軌跡之間的過渡過程,因此通過對比切換前后開關序列(1)(,1)和(2)(,2)對應的穩態優化磁鏈軌跡在不同基波相位的大小,即可得到定子磁鏈偏差。
首先,依據電機定子磁鏈與定子電壓之間的關系,穩態優化定子磁鏈可通過對穩態定子電壓ss進行積分得到,其表達式為
式中,ss(0)為磁鏈初值。根據定子角頻率和角度的關系,式(6)可被改寫為
式中,s為定子角頻率;為基波相位。在忽略母線電壓波動時,進一步簡化式(7)可得
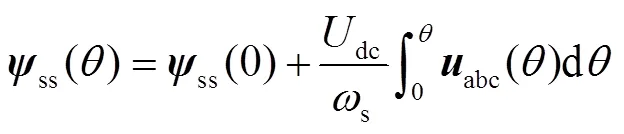
式中,dc為母線電壓;abc為三相開關波形,abc可依據開關序列(,)進行PWM脈沖重構得到。由于式(8)所計算的穩態優化定子磁鏈起點為零點,計算結果存在一個直流偏置,需要減去這個偏置才能得到準確的穩態優化磁鏈軌跡。偏置的大小為磁鏈在一個基波周期內的均值,其表達式為

最終可得到穩態優化磁鏈軌跡的計算公式為

圖4為調制度為0.987時,五脈沖SHEPWM與三脈沖SHEPWM穩態優化磁鏈軌跡之間的定子磁鏈偏差。從圖4中可知,不同相位處的定子磁鏈偏差大小均不相同,因此還需要特定的補償策略對定子磁鏈偏差進行補償。
2.2 定子磁鏈偏差補償策略
為了詳細闡述定子磁鏈偏差補償的原理和方法,將兩電平逆變器的相關變量和物理過程進行如下定義。
(2)將一個開關時刻時間調節量定義為D。若要提前開關時刻,即期望電平跳變時刻早于實際電平跳變時刻,則D0。同理,若開關時刻延遲,期望電平跳變時刻遲于實際電平跳變時刻,則D0。
圖5給出了開關時刻修正示意圖,根據電壓積分方程可知,延長高電平持續時間可增大定子磁鏈,減小高電平持續時間,減小定子磁鏈[14]。圖中Ⅰ區域與Ⅳ區域所示開關跳變相對于原始PWM波形延長了高電平持續時間,能夠增大定子磁鏈;Ⅱ區域與Ⅲ區域所示開關跳變相對于原始PWM減小了高電平持續時間,能夠減小定子磁鏈。通過控制開關時刻的修正大小,改變電壓伏秒積,可補償調制模式切換導致的定子磁鏈偏差。圖5中s表示一個采樣周期持續時間,采樣周期時間大小為可修正開關時刻的范圍,圖中加減號對應表示磁鏈增加與減小。
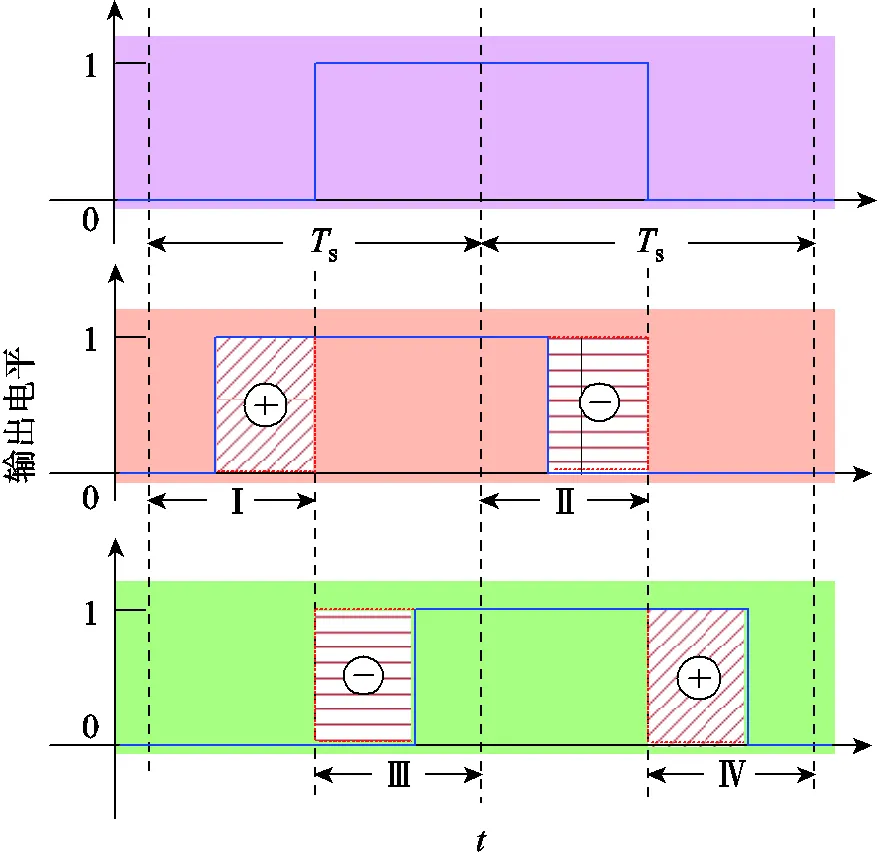
圖5 開關時刻修正示意圖
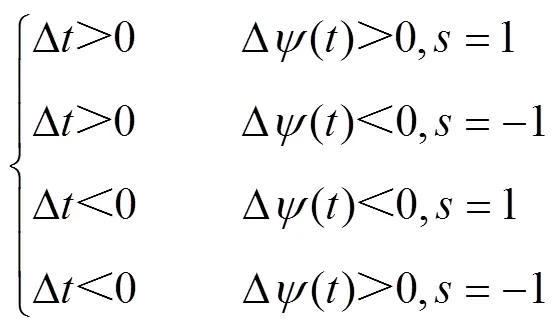
在需要增大定子磁鏈時,若該采樣周期電平由低變高1(如圖5中Ⅰ區域所示),則應提前電平跳變,即D>0,延長高電平持續時間,圖5中加號表示磁鏈增大;若電平由高變低-1(如圖5中Ⅳ區域所示),則應延遲電平跳變,即D<0。在需要減小定子磁鏈時,若該采樣周期電平由高變低-1(如圖5中Ⅱ區域所示),則應提前電平跳變時刻,即D>0,縮短高電平持續時間,圖中減號表示磁鏈減小;若電平由低變高1(如圖5中Ⅲ區域所示),則應延遲電平跳變時刻,即D<0。總結可得不同情況開關時刻修正策略為
根據兩電平逆變器的規律,表示逆變器三相橋臂開關狀態,A、B、C分別對應A、B、C三相。若上橋臂導通,則1,若下橋臂導通,則0。逆變器在兩相靜止ab坐標系下電壓與橋臂開關狀態的關系為
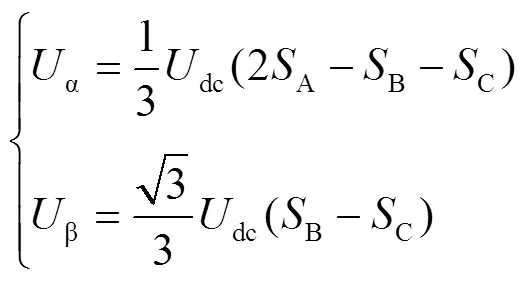
式中,a、b分別為a、b軸電壓。
ab兩相靜止坐標系下定子磁鏈s表達式為


2.3 開關時刻修正幅度計算
根據上述定子磁鏈偏差補償步驟建立以下三種磁鏈偏差補償原則,對具體開關時刻修正幅度進行詳細計算,不同情況的磁鏈偏差補償過程如圖6所示,D()的下標用來區分不同情況的磁鏈偏差。
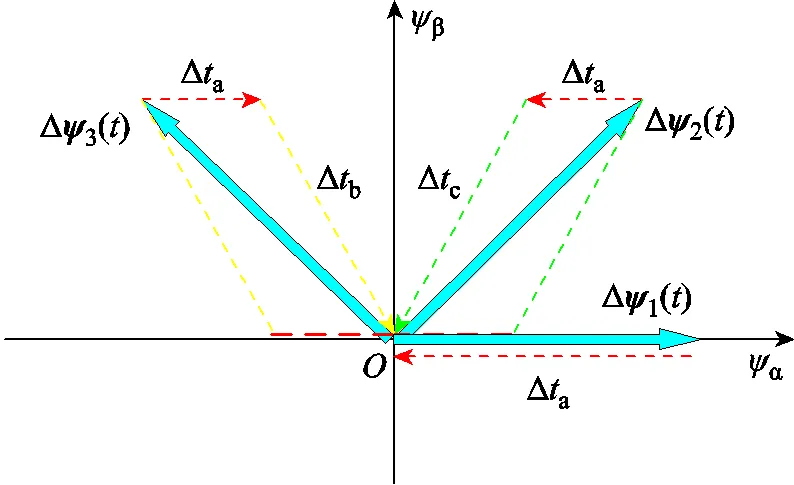
圖6 誤差修正原則示意圖

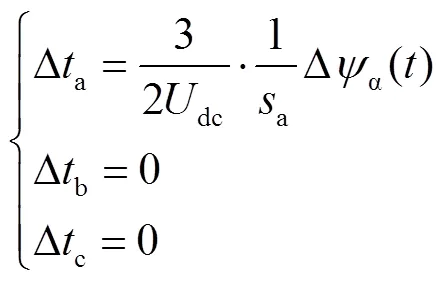
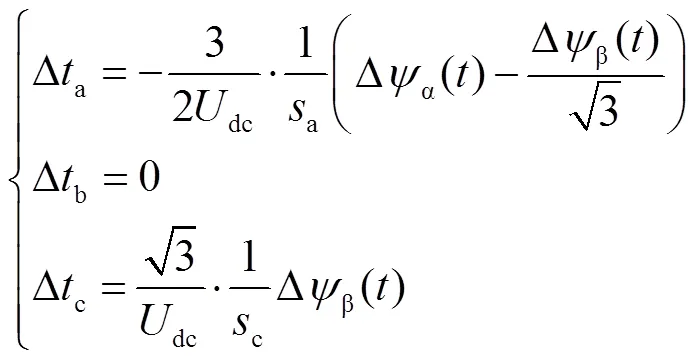
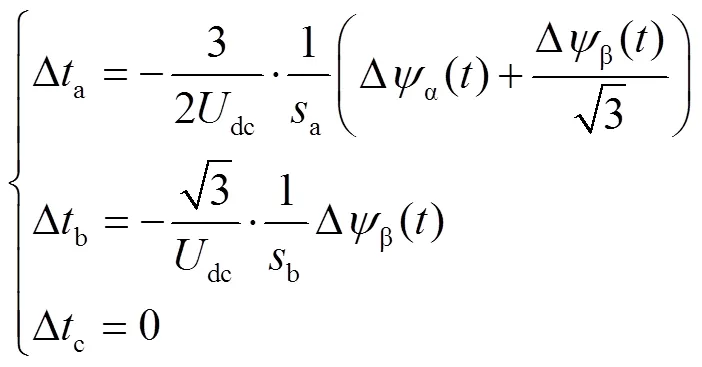
上述公式計算的開關時刻修正幅度均滿足不引入新的磁鏈偏差原則,并且此方法只用對兩相開關時刻進行修正,簡化了定子磁鏈偏差補償的過程。
3 仿真與實驗
為了驗證定子磁鏈偏差補償方法的正確性和合理性,本文通過Matlab/Simulink對該切換策略進行仿真,并通過實驗進行驗證。仿真和實驗的電機參數見表1。
表1 電機參數
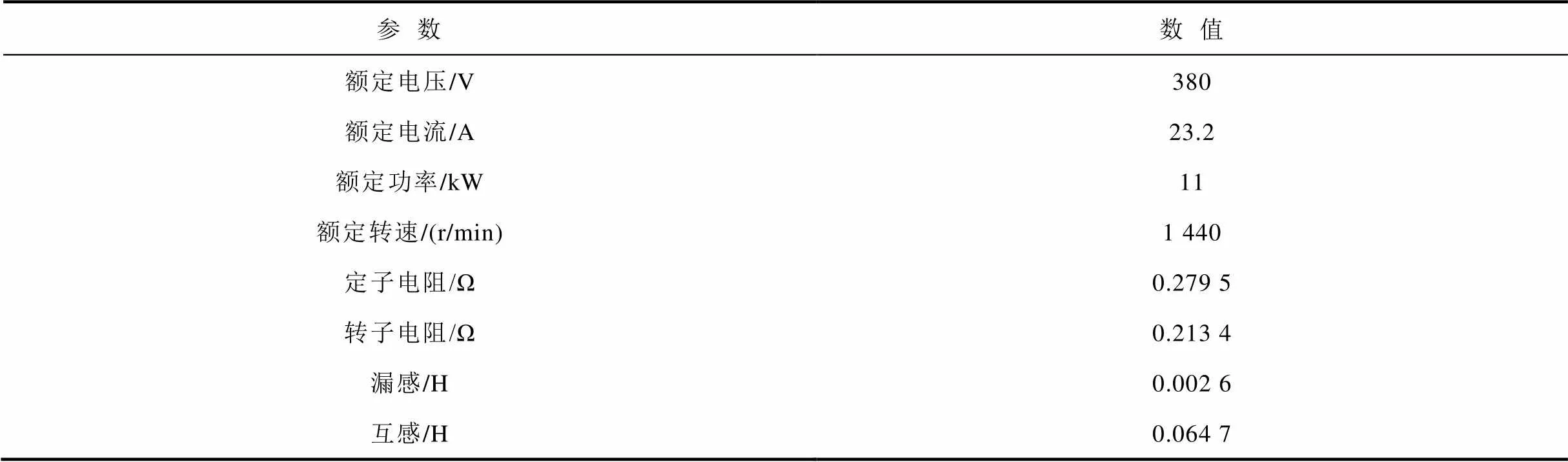
Tab.1 Motor parameter
3.1 相同調制模式不同脈沖數之間切換仿真結果
以五脈沖SHEPWM切換至三脈沖SHEPWM的切換過程為例進行仿真分析。圖7a為未進行開關時刻修正時,五脈沖SHEPWM切換至三脈沖SHEPWM磁鏈軌跡動態過程圖。
傳統方法選擇磁鏈偏差最小的優化切換點,如在圖7a中的A點進行切換。若在任意點實現切換,例如圖7a中A點進行切換,A點位于五脈沖SHEPWM穩態優化磁鏈軌跡上,B點為三脈沖SHEPWM穩態優化磁鏈軌跡上與A點基波相位相同的定子磁鏈,AB兩點之間存在明顯的磁鏈偏差。從圖7a中可以看出,切換后電機實際定子磁鏈軌跡偏離了三脈沖SHEPWM穩態優化磁鏈軌跡,將造成轉矩和電流沖擊。在A點切換電機轉矩和電流波形如圖7b所示,切換過程出現了9.8A的電流沖擊和28N·m轉矩沖擊;調制模式在19.93s進行切換,約兩個基波周期后在19.97s電機恢復穩態,時間較長。

圖7 未補償切換輸出特性

圖8 定子磁鏈偏差補償示意圖
依據計算所得的Da和Db,提前更改PWM模塊的輸出脈沖,對定子磁鏈偏差進行補償。施加補償后磁鏈軌跡如圖9a所示,切換后電機定子磁鏈軌跡快速恢復三脈沖SHEPWM穩態優化磁鏈軌跡運行,定子磁鏈在兩種穩態優化磁鏈軌跡間平滑過渡。施加補償的轉矩和電流波形如圖9b所示,調制模式切換過程未產生明顯電流沖擊和轉矩沖擊,系統在切換后一個采樣周期即恢復穩定運行狀態。
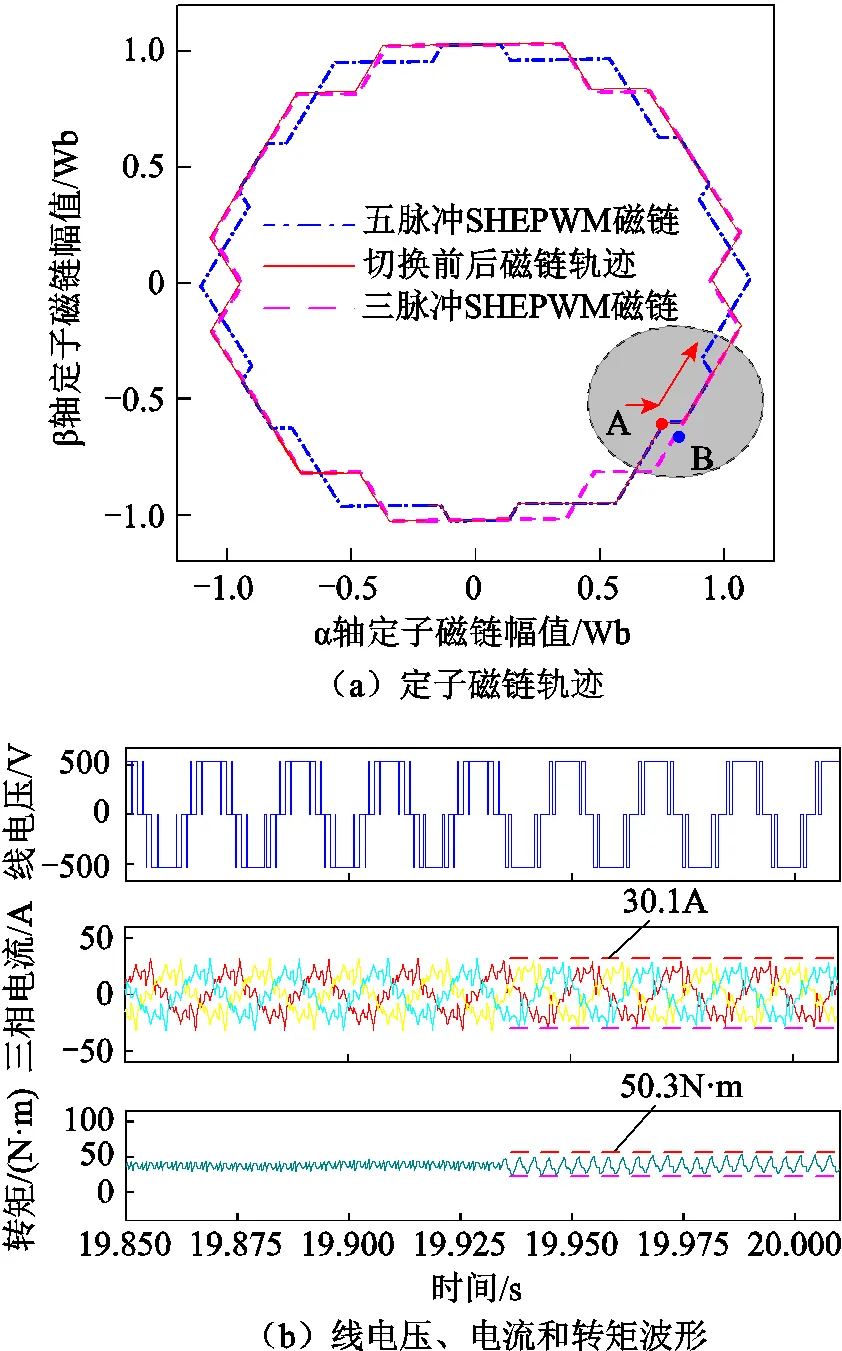
圖9 補償后切換輸出特性
3.2 不同調制模式不同脈沖數之間切換仿真結果
切換前后兩種調制模式不同時,由于兩種調制模式的優化目標不同,電流諧波含量區別較大,產生的轉矩沖擊和電流沖擊將更明顯。以CHMPWM與SHEPWM之間的切換為例進行分析。
圖10為七脈沖CHMPWM切換至五脈沖SHEPWM的動態磁鏈過程圖,切換點A位于七脈沖CHMPWM穩態優化磁鏈軌跡上,B點為五脈沖SHEPWM穩態優化磁鏈軌跡上與A點基波相位相同的點,AB兩點之間存在明顯磁鏈偏差。
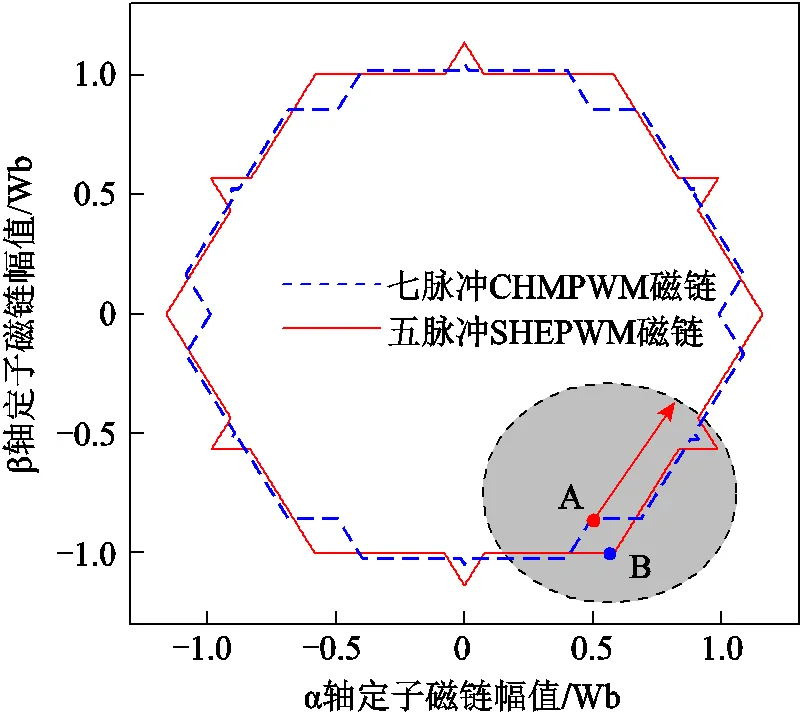
圖10 切換過程定子磁鏈動態示意圖
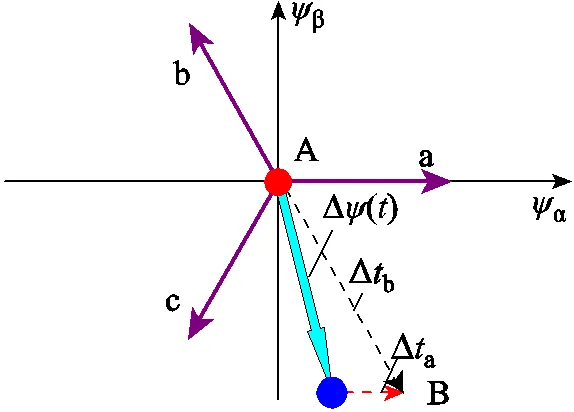
圖11 定子磁鏈偏差補償示意圖
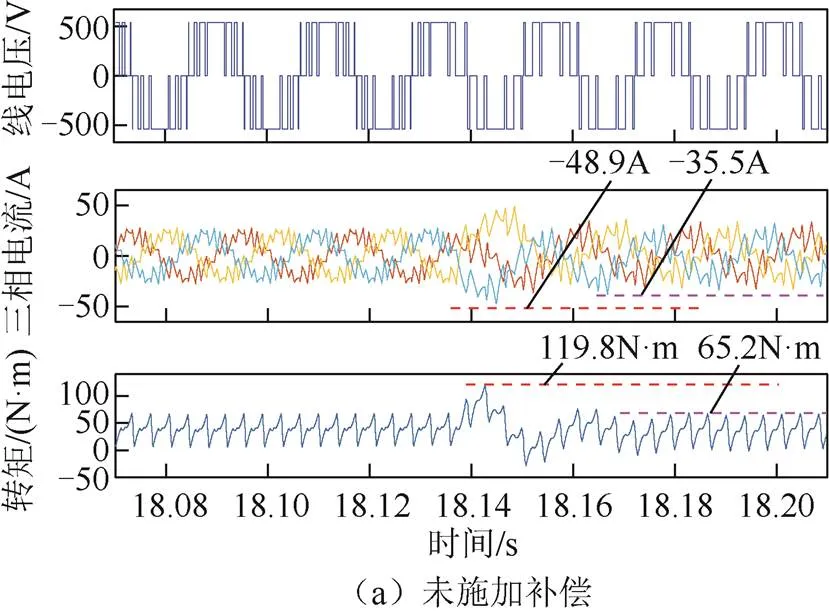
圖12a為未施加補償時七脈沖CHMPWM在A點切換至五脈沖SHEPWM的轉矩和電流波形,調制模式切換過程相電流沖擊為13.4A,轉矩沖擊為54.6N·m,電流和轉矩沖擊均較大。依據計算所得Da和Db,對定子磁鏈偏差進行補償。施加補償后轉矩電流波形如圖12b所示,切換過程轉矩和電流未產生任何沖擊,系統在切換后一個采樣周期即恢復穩定運行狀態。
3.3 實驗結果
本文實驗所用平臺通過電機與飛輪相連模擬機車牽引大慣量負載工況,實驗平臺如圖13所示,實驗電機所用電機參數見表1。
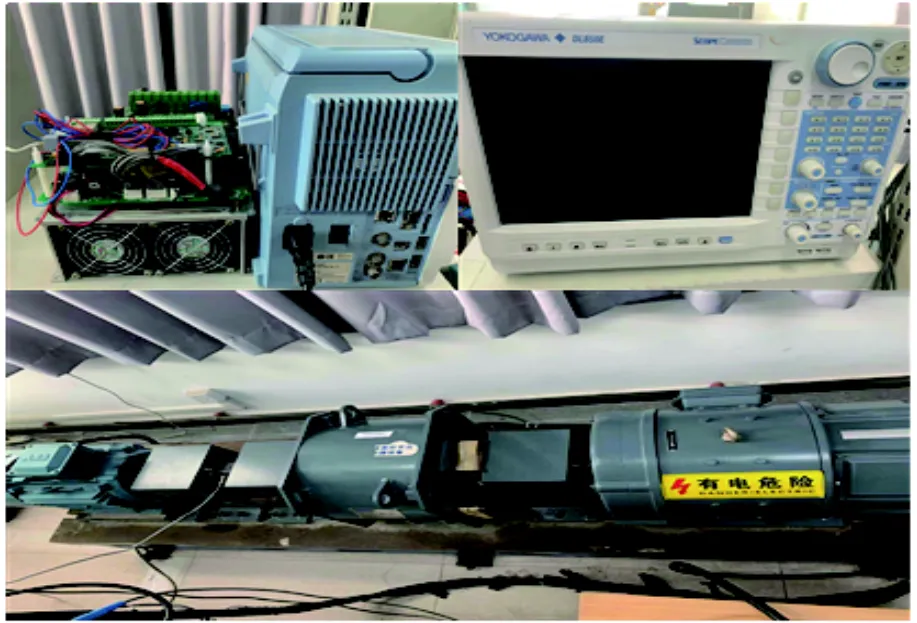
圖13 牽引實驗平臺
牽引電機采用轉速控制模式,給定轉子磁鏈的幅值為0.987 6Wb,轉速指令通過斜坡給定,轉速斜坡每秒升速為75.65r/min,實際對應的轉矩大小為38.5N·m,電機從靜止開始加速,在全速度范圍調制策略如圖14所示,當電機輸出的頻率低于20Hz 時采用異步SVPWM調制策略;在20Hz和30Hz之間采用15脈沖同步SVPWM調制策略;在大于30Hz時采用SHEPWM調制策略,由11脈沖SHEPWM逐漸減小脈沖數量,直至過渡方波。
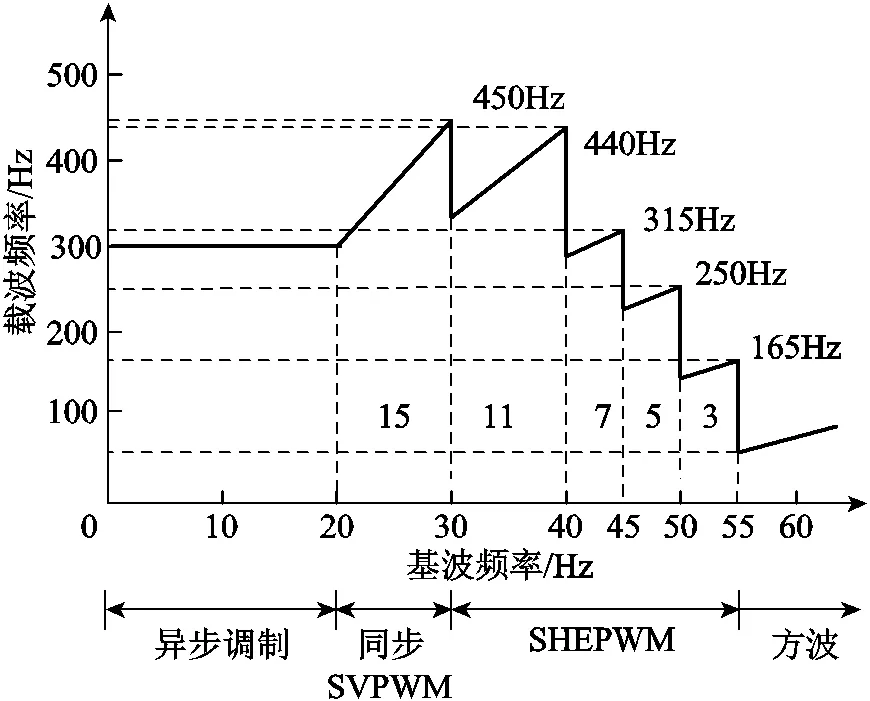
圖14 全速度范圍調制策略
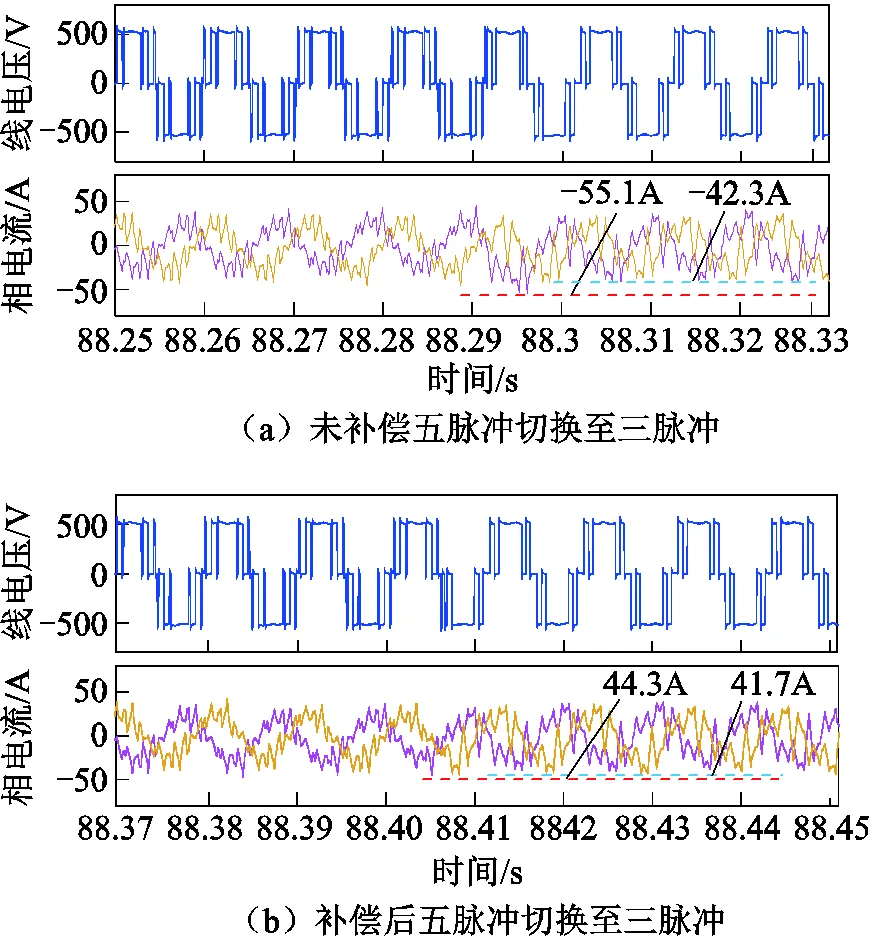
未施加補償時,五脈沖SHEPWM切換至三脈沖SHEPWM的實驗波形如圖15a所示,切換過程的峰值電流為55.1A,切換過程產生了12.8A的電流沖擊;施加補償后,五脈沖SHEPWM切換至三脈沖SHEPWM的實驗波形如圖15b所示,峰值電流為44.3A,切換過程產生的電流沖擊為2.6A。相對于未加補償的電流特性,電流沖擊縮小了5倍,定子磁鏈偏差補償策略的效果較為明顯。
為了驗證基于開關時刻修正的多模式調制切換策略的通用性,對不同調制模式之間的切換過程進行實驗驗證。全速度范圍其他不同切換過程實驗結果如圖15所示,圖15c為15脈沖同步SVPWM切換至11脈沖SHEPWM的電壓電流波形,圖15d為11脈沖SHEPWM切換至七脈沖SHEPWM的電壓電流波形,圖15e為七脈沖SHEPWM切換至五脈沖SHEPWM的電壓電流波形。
從以上實驗結果可知,不同調制模式、相同調制模式不同脈沖數之間切換均不會產生電流沖擊,在進行開關時刻修正后進行切換,不同調制模式之間均能實現平滑過渡。實驗結果驗證了開關時刻修正策略的通用性和有效性。
4 結論
牽引傳動系統在全速度范圍內運行時通常采用多種調制模式混合的方式,調制模式切換會產生電流和轉矩沖擊問題。本文對調制模式切換引起定子磁鏈偏差的過程進行詳細分析,提出了一種通過改變開關時刻修正因調制模式切換引起的定子磁鏈偏差的多模式調制切換策略。該策略在兩相靜止坐標系中對定子磁鏈偏差補償,依據具體定子磁鏈偏差特性,計算出各相開關時刻修正大小,僅需對兩相開關時刻進行修正即可實現對定子磁鏈偏差的完全補償。該策略可以改善傳統選擇最優切換點方法的局限性,實現調制模式在任意時刻無沖擊切換。該策略不受具體調制模式和電機參數約束,具備較好通用性。仿真和實驗驗證了切換策略的有效性和通用性。
[1] 張國政, 陳煒, 谷鑫, 等. 三電平牽引變流器改進同步空間矢量調制策略[J]. 電工技術學報, 2020, 35(18): 3908-3916.
Zhang Guozheng, Chen Wei, Gu Xin, et al. An improve synchronized space vector modulation strategy for three-level inverter[J]. Transactions of China Electrotechnical Society, 2020, 35(18): 3908-3916.
[2] 高瞻, 李耀華, 葛瓊璇, 等. 低載波比下三電平中點鉗位變流器改進型同步載波脈寬調制策略研究[J]. 電工技術學報, 2020, 35(18): 3894-3907.
Gao Zhan, Li Yaohua, Ge Qiongxuan, et al. Research on improved synchronized carrier based PWM for three-level neutral point clamped converter under low carrier ratio[J]. Transactions of China Electrotechnical Society, 2020, 35(18): 3894-3907.
[3] 崔恒斌, 馮曉云, 張杰, 等. 基于載波脈寬調制技術的牽引整流器諧波特性分析方法[J]. 電工技術學報, 2013, 28(9): 21-31.
Cui Hengbin, Feng Xiaoyun, Zhang Jie, et al. Harmonic characteristic analysis of carrier based pules-width modulation traction rectifier[J]. Transa-ctions of China Electrotechnical Society, 2013, 28(9): 21-31.
[4] 趙雷廷, 刁利軍, 董侃, 等. 地鐵牽引變流器-電機系統穩定性控制[J]. 電工技術學報, 2013, 28(6): 101-107.
Zhao Leiting, Diao Lijun, Dong Kan, et al. Stabilization control for metro traction converter-motor system[J]. Transactions of China Electrotechnical Society, 2013, 28(6): 101-107.
[5] 刁利軍, 董侃, 趙雷廷, 等. 基于雙DSP-FPGA架構的城軌列車電力牽引控制系統[J]. 電工技術學報, 2014, 29(1): 174-180.
Diao Lijun, Dong Kan, Zhao Leiting, et al. Dual DSPs-FPGA structured traction control system for urban rail transit vehicle[J]. Transactions of China Electrotechnical Society, 2014, 29(1): 174-180.
[6] 周明磊, 李強, 游小杰, 等. 基于SHEPWM的多模式調制切換策略研究[J]. 鐵道學報, 2014, 36(1): 34-39.
Zhou Minglei, Li Qiang, You Xiaojie, et al. Research on SHEPWM-based switching strategy of multi-mode modulation[J]. Journal of the China Railway Society, 2014, 36(1): 34-39.
[7] 苑國鋒, 陳棟, 鄭春雨. 電力機車牽引傳動系統的多模式調制策略及切換方法研究[J]. 電機與控制學報, 2021, 25(1): 126-135.
Yuan Guofeng, Chen Dong, Zheng Chunyu. Research on multi-mode modulation strategy and switching method of electric locomotive traction drive system[J]. Electric Machine and Control, 2021, 25(1): 126-135.
[8] 周明磊, 王琛琛, 游小杰. 基于交流電機定子磁鏈的CHMPWM切換策略[J]. 中國電機工程學報, 2016, 36(14): 3955-3964.
Zhou Minglei, Wang Chenchen, You Xiaojie. A switching strategy of current harmonic minimum PWM based on thestator flux trajectory of AC traction motors[J]. Proceedings of the CSEE, 2016, 36(14): 3955-3964.
[9] 周明磊, 劉偉志, 邱騰飛, 等. 適用于多模式脈寬調制的通用切換策略研究[J]. 中國電機工程學報, 2019, 39(7): 2125-2133.
Zhou Minglei, Liu Weizhi, Qiu Tengfei, et al. A genaral switching strategy for multi-mode pulse width modulation[J]. Proceedings of the CSEE, 2019, 39(7): 2125-2133.
[10] Oikonomou N, Holtz J. Closed-loop control of medium-voltage drives operated with synchronous optimal pulsewidth modulation[J]. IEEE Transactions on Industry Applications, 2008, 44(1): 115-123.
[11] Narayanan G, Ranganathan V T. Synchronised PWM strategies based on space vector approach. part I: principles of waveform generation[J]. IEEE Proceedings on Power Applications, 1999, 146(3): 267-275.
[12] Geyer T, Oikonomou N, Papafotiou G, et al. Model predictive pulse pattern control[J]. IEEE Transactions on Industry Applications, 2012, 48(2): 663-676.
[13] Holz J. Pulsewidth modulation-a survey[J]. IEEE Transactions on Industrial Electronics, 1992, 39(5): 410-420.
[14] 王治國, 鄭澤東, 李永東, 等. 軌道交通車輛牽引電傳動系統的調制與控制策略[J]. 電工技術學報, 2016, 31(24): 223-232.
Wang Zhiguo, Zheng Zedong, Li Yongdong, et al. Modulation and control strategy for electric traction drive system of rail transit vehicles[J]. Transactions of China Electrotechnical Society, 2016, 31(24): 223-232.
[15] Rathore A K, Holtz J, Boller T. Synchronous optimal pulsewidth modulation for low-switching-frequency control of medium-voltage multilevel inverters[J]. IEEE Transactions on Industrial Electronics, 2010, 57(7): 2374-2381.
Multi-Mode Modulation Switching Strategy Based on Switch Time Correction
Yuan Guofeng1,2Shen Yang1
(1. Academy of Electrical and Control Engineering North China University of Technology Beijing 100144 China 2. Inverter Technologies Engineering Research Center of Beijing Beijing 100144 China)
Multi-mode modulation strategy is usually used in electric traction drive system. In order to solve the problem of current and torque impact caused by switching between modulation modes, this paper studies the stator flux deviation caused by switching modulation modes, and proposes a general multi-mode modulation switching strategy. By analyzing the influence of changing the switching time on the stator flux linkage in two-phase static coordinate system, the compensation amplitude of each phase switching time is calculated to compensate the stator flux linkage deviation, so as to realize the smooth switching of multi-mode modulation. The strategy compensates the stator flux deviation directly, and it is not constrained by the specific modulation mode and motor parameters, so it can achieve no impact switching at any time. The simulation and experiment verify the generality and effectiveness of the stator flux deviation compensation strategy.
Multi-mode modulation, torque impact, switching strategy, stator flux deviation, switch time correction
10.19595/j.cnki.1000-6753.tces.210084
TM464
北方工業大學毓優人才計劃資助項目(107051360021XN083/043)。
2021-01-17
2021-08-18
苑國鋒 男,1979年生,博士,高級工程師,研究方向為電力機車牽引控制、風力電機控制。E-mail:ygf@ncut.edu.cn(通信作者)
沈 陽 男,1996年生,碩士研究生,研究方向為電力機車牽引脈寬調制技術。E-mail:243772901@qq.com
(編輯 赫蕾)