基于LiDAR點云的景觀空間“綠視率”量化分析方法研究
2022-03-15 06:27:20成實
中國園林 2022年2期
成 實
張冠亭
張瀟涵
劉奕秋
中國已進入了城市化下半場,十九大報告中明確指出我國正轉向高質量發展階段,需滿足人民群眾對于美好生活的需求。2018年12月,住房和城鄉建設部發布了10項標準,旨在適應中國經濟由高速增長階段轉向高質量發展階段的新要求,以高標準支撐和引導我國城市建設,以及工程建設的高質量發展。在這一趨勢下,風景園林領域愈發強調研究與規劃設計實踐的精細化。
隨著計算機技術的發展,二維數字繪圖軟件和三維實體建模方法的出現,影響著設計師判斷決策的途徑。時至今日,在風景園林規劃和設計實踐中這些手段仍有沿用,并且在研究與設計實踐中逐漸融入圖像、視頻、航空攝影、GIS地圖和數字地形模型等多種場地勘察及建構手段,從而塑造出更加精細化的風景園林環境。
為應對日益復雜化的風景園林環境,盡管學者們嘗試將既有三維數字建模方法加以交互融合,但仍無法精準呈現出風景園林環境多變的空間特征,如植被、山體等要素的形態特征。
自20世紀90年代末起,國內外不同科研機構便開始嘗試采用激光掃描技術以獲得更精確的地理環境數據。同時,得益于不斷增強的數字運算技術,在近20年間,三維點云采集技術得到了迅速發展,隨著多領域對于空間數據的需求日益增強,三維激光雷達掃描技術(Light Detection and Ranging,LiDAR)作為獲取三維空間信息的新技術手段,突破了傳統測量及數字建模方式的局限性,可滿足風景園林領域研究與實踐中所面臨的多樣化定量分析需求。
目前,國內外風景園林領域對于點云數據的應用主要有三維模型的逆向建造[1]、植被監測[2-3]、三維景觀格局分析[4-7]、古典園林測繪[8-9]、微氣候研究[10-11]等多個方面,而鮮有研究利用點云數據針對中微觀景觀空間形態展開定量分析。作為風景園林領域的一個新興工具,點云數據集能對各尺度空間進行高密度和厘米級精度記錄,相關建模技術的運用從微觀層面的復雜植被要素到宏觀層面的街區規劃及地貌復原均有所涉及[12]。筆者認為,LiDAR點云不僅可運用于風景園林環境信息的采集與分類整理,更可運用于量化解析及評估景觀空間形態特征。尤其,針對景觀空間中植被形態的量化研究,LiDAR點云相較其他傳統數據更具有顯著性優勢。由此,本文以常用來描述城市植被形態變化的“綠視率”指標為例,試圖解答以下2個研究議題。
1)如何基于LiDAR點云技術進行風景園林環境的綠視率量化研究?具體方法及操作途徑有哪些?
2)基于LiDAR點云數據的綠視率量化研究具有哪些優勢?并存在哪些運用可能性?
1 風景園林領域中“綠視率”指標的計算分析途徑
綠視率(Green View Index,GVI)指的是一定視野范圍內植被所占百分比,它被證實與人們的身心健康存在著緊密的聯系[13-15],是評價風景園林空間舒適性的重要指標之一。
1.1 “綠視率”指標的過往計算方法及局限
傳統綠視率指標的計算多依托于實地拍攝的二維影像,用人工方式對圖像中的各類景物要素進行分類,再通過計算植被的像素占比獲得特定圖像中的“綠視率”指數。隨著街景圖片作為電子地圖的全新服務方式被Google、百度等大型地圖運營商投入使用,為綠視率的研究開辟了新途徑,一些學者利用海量的街景圖片結合機器學習、圖像分割等技術實現綠視率的自動提取及分析等過程[16-18]。
基于對過往研究文獻的梳理發現,過往研究中對于綠視率的分析方法仍存在一定局限性。1)分析視點、視角的固定化及片段化,若需探索不同地點、不同視線方向、不同視野寬度下的綠視率變化,則將拍攝并制作更多二維圖像樣本以供分析。2)難以消除行人、行車等隨機冗余因素,計算結果往往受采集圖像影響而可能存在較大誤差。3)現階段相關研究多借助圖像識別技術利用開源街景數據計算獲得特定街道空間的綠視率變化,反觀,風景區、社區公園等大量景觀空間則因缺少海量開源攝影數據支撐,并不具備較高適用性。
1.2 利用LiDAR點云進行“綠視率”計算的優勢
LiDAR系統一般采用非接觸式高速激光測量方式,通過獲取激光發射點與目標之間的距離,結合激光發射器的位置和姿態信息進行聯合計算,得到目標區域的密集三維坐標及激光反射強度等信息,以海量點云數據的方式呈現[19-20]。隨著LiDAR技術的出現及發展可以逐漸彌補目前綠視率計算方式所存在的缺陷。首先,LiDAR點云技術可以實現對研究場景的全方位記錄,所獲取的點云數據可完整地呈現三維場景信息,在空間分析時可任意選取視點展開進一步研究;其次,可對點云數據加以分類,以剔除隨機冗余因素的影響,且不同于傳統綠視率分析,借助三維點云數據除了能獲取“綠視率”指數外,還可進一步提取植被層次、景深等空間信息,這是傳統圖像數據所無法實現的;最后,LiDAR系統可搭載不同的平臺及移動設備,不受場地的限制,可應用于多種場景的空間信息采集。
聚焦當下風景園林領域的研究與實踐訴求,不難發現,借助LiDAR點云技術的“綠視率”計算方法尤為適用于中微觀尺度風景園林環境的相關研究及設計輔助,能精細化地呈現出植被等復雜空間要素的形態差異,實現對于景觀空間的量化解譯。但受制于點云數據體量相對較大,在實際形態量化分析過程中難以運轉,故過往研究多停留于對植被等特定景觀空間要素的采集與歸類。本文試圖構建基于LiDAR點云模型的景觀空間“綠視率”指標量化解析新方法,以期拓展LiDAR點云在景觀空間研究領域的運用途徑。
2 基于LiDAR點云的“綠視率”量化分析方法建構
2.1 方法框架
如上文所述,LiDAR點云數據在空間信息采集效率及模型呈現精度上均有著顯著的優勢,改變并優化了傳統景觀空間形態分析的過程。本文研究嘗試提出了基于LiDAR點云的綠視率計算方法,方法框架包含數據準備、數據處理、空間建模、形態分析4個主要步驟(圖1)。

圖1 基于三維點云數據的景觀空間分析方法操作步驟Fig.1 Operating steps of landscape spatial analysis method based on three-dimensional point cloud data
2.2 具體操作步驟
1)數據準備。
隨著激光點云采集技術的發展,車載、機載、手持式激光掃描儀等多種采集方式可滿足各類景觀空間采集需求。本文選取手持式GeoSLAM的三維激光掃描儀,經提前勘查現場后,展開外業數據采集工作:首先,根據場地現狀特征設置閉合采集路線;其次,在采集時將儀器平端于胸前中線位置,以正常步速沿采集路徑行走,每間隔百米完成四周全景的定點掃描,其中對于距離道路較遠及圍合度較高區域,需進一步深入補充采集;最后,經查驗后,確保采集信息完整,無缺漏,要素結構體現充分,從而完成研究場地三維點云數據的采集工作。同時,另需準備研究場地的各類矢量基礎數據作為后續場地模型校準及分析研究開展的輔助資料。
2)數據處理。
考慮到所獲取的研究場地點云數據,往往數據量大且缺少地理參照,需進一步處理以滿足后續研究要求。進一步利用Trimble Realworks等軟件對原始點云數據進行地理坐標配準、數據清理及重采樣等操作,得到研究范圍內的精準點云數據;通過軟件算法進行點云數據自動分類,再經由人工校準與分類處理;最后,將完整點云數據模型分為地面、植被、建筑及其他4類點云數據層,亦可根據不同研究需求對點云數據進行相應的分類處理。
3)空間建模。
點云模型由若干測試點組成,且測試點之間存在較大空隙,無法直接用于景觀空間形態分析,故需將點云數據進一步實體化形成封閉實體。研究選取具有較為完善空間建模及分析工具的ArcScene 10.6平臺進行點云模型建模及空間形態分析。首先,在平臺中依次添加場地CAD數據和分類后的各點云數據層,分別對植被、建筑、地面、其他4類數據層進行逐一建模處理;其次,考慮景觀空間中植被要素形態復雜度較高,且非連續實體面,難以直接利用三角網格面進行表面模型構建。因此,本文采用目前常用的植被建模手段“體素法”將植被點云數據轉換為形態相同的體素模型,并利用kd-tree算法對植物點云數據進行鄰域檢索與精簡,在不影響其空間形態的基礎上大幅縮減運算數據大小,提升后續量化計算速度;與此同時,在無法獲取研究場地完整建筑等要素信息的特定情況下,亦可借助CAD等矢量數據與地面激光雷達相結合的方式補充并校準場地中相應模型數據;最終,構建出可供形態量化分析的三維點云空間數據。
4)形態分析。
在空間模型建構的基礎上,依托于ArcGIS平臺結合Python編程手段進一步完成對于研究場地空間形態特征的量化分析,并計算出各類三維形態指標的相應數值。其中,考慮目前ArcGIS平臺自帶的工具集無法滿足風景園林環境中各類形態量化需求,故針對不同研究分析的需要,編寫對應的算法腳本,確定研究所需的輸入條件及輸出條件,以及形態量化評定過程。最終,形態量化分析過程與計算結果可通過數值圖表、二維柵格圖及三維數值分布圖等多種可視化表達方式加以清晰直觀地呈現。
3 案例運用
3.1 案例選取
為體現出LiDAR點云數據采集場地的可適應性,且考慮到研究對象的普及性及其空間形態的豐富性,本文以住區綠地空間作為研究對象,對基于LiDAR點云的綠視率分析方法加以運用嘗試。選取南京河西某小區作為研究樣本展開具體分析運算,該小區占地約7.57hm2,綠化率為45%,戶外空間面積達4.16hm2,包含水體、植被、微地形、娛樂設施、小型構筑物等多種景觀要素,具有豐富的空間形態變化。
3.2 分析方法運用
1)點云數據預處理及三維模型構建。
根據前文構建的方法流程,本研究首先用GeoSLAM手持三維激光掃描儀對研究場地進行全面掃描,并對所采集的原始數據利用Realworks進行點云分類,通過自動處理與手動糾錯2種模式對場地點云進行較為準確的分類,具體分為建筑、地面、植被、其他(含路燈、坐凳、垃圾桶等)4類。其中,通過ArcGIS結合python編程處理將植被及其他景物信息以體素的形式構建,地面點云則以數字高程模型的形式呈現。考慮地面激光掃描設備對于高層建筑信息的采集能力相對較弱,造成建筑頂層空間信息的缺失,所以在建模過程中會采用矢量信息根據建筑輪廓及高度對建筑三維模型進行構建及補充,以保證場地空間模型的完整性(圖2)。

圖2 研究場地的三維場地模型構建流程Fig.2 Construction process of 3-D point cloud model for research site
2)綠視率指標計算。
本文通過在三維點云模型中模擬人群在住區景觀內部的所視綠化情況,從而分析計算出從該視點所觀測到的周邊環境綠視率指數。具體分析步驟如下。
首先,根據正常人眼視高及視野范圍,在該研究視點模擬出視高1.6m,水平視野360°,垂直視野120°(視線水平上側50°、下側70°),視線長度為300m的完整視野范圍進行分析。其次,在確定完整視野范圍后,由該視點發射出水平及垂直視角均為2°間隔的300m構造視線,共生成5 400根三維構造視線,從而形成完整的視線罩面。再次,利用ArcGIS三維分析模塊中的通視分析功能計算各構造視線中的通視視線及不可視視線,確定該視點下的人眼可視范圍及所視空間要素的編號信息,再通過要素編號明確各通視視線所觀看到的具體空間要素。最后,根據計算獲得的三維可視視線及可視空間要素,經進一步處理獲得該視點下的360°全景視野立面(圖3)。

圖3 研究場地“綠視率”指標計算過程Fig.3 The calculation process of site GVR
3.3 與傳統計算方式對比
為總結出基于三維點云模型的空間形態量化方法優勢,將各測試點基于點云模型的綠視率分析結果與傳統計算途徑所得到的計算結果加以對比及分析。
1)傳統“綠視率”指標計算方法。
文中除基于三維點云數據的“綠視率”指標量化計算方式外,另選取了過往研究中常用的2種分析途徑:傳統人工分類的“方格測量法”及機器自動分類的“圖像識別分析法”,對相同視點下不同途徑所測算得到的“綠視率”結果加以比較(圖4)。
(1)方格測量。
采用方格測量分析,需通過Photoshop CC對照片加以處理,以30×40個透明方格網完整覆蓋測試照片樣本,再由人工判斷各方格中包含的要素內容,并用不同的顏色代表植被、建筑、地面、天空、設施等,最后統計各要素所占的格數,從而計算出各要素在總圖面中所占的比重。
(2)圖像識別。
采用圖像識別分析,本文使用的原始圖片分辨率為4 032×3 024,主要借助機器學習技術對樣本圖像信息加以處理與分析,這亦是目前常用的“綠視率”計算方式之一。本文選擇Deeplab-v3+模型進行圖像處理,并利用數據集“Cityscapes Dataset”進行圖像識別訓練,最后輸入測試照片樣本。
2)3種計算方式對比。
為證明基于LiDAR點云的“綠視率”計算方法的可靠性和適用性,選取了該小區中4處存在明顯空間差異的景觀節點,分別涵蓋水景、游樂設施、停車場等各類景觀要素,且各節點間呈現出較為明顯的植被分布密度差異,具有較為典型的研究意義及價值(圖4)。對各節點計算結果進行對比分析,總結出以下3點優勢。
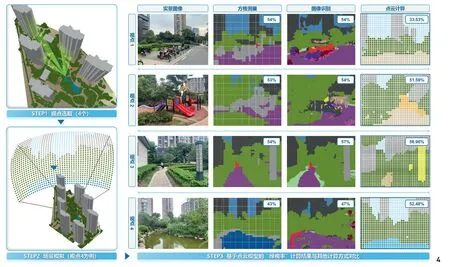
圖4 4處節點“綠視率”計算結果匯總Fig.4 Summary of the GVR calculation results of 4 nodes
(1)分析高效性。
利用本文提出的方法,對研究小區進行整體空間信息采集用時約6h,并且采集過程中可通過采集設備實時觀察數據的完整性,及時對遺漏區域進行復采或校準,后續分析中可根據研究需要在測試模型中選取任意測試點加以分析計算,不僅可計算出任意測試點下的全景綠視率,更能進一步計算出該視點在不同視距下的可視綠化層次與相應面積(圖5)。而無論方格測量抑或圖像識別2種計算方法,均需要研究人員實地拍攝,本文采用的是傳統相機(焦距35mm),一張攝影圖像僅能表示單一視點在單一視線方向的畫面,若需單視點多方向或多視點的畫面則需要人工逐一拍攝,令數據采集與分析時間不可估計。
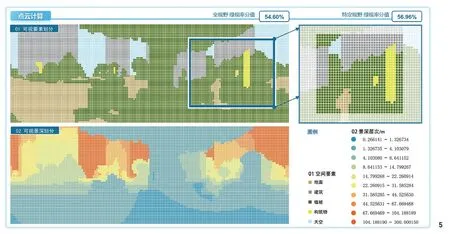
圖5 基于點云分析的“綠視率”計算結果(含:全視景及綠化層次)Fig.5 GVR calculation results based on point cloud analysis (including: panoramic view and greening level)
(2)數據準確性。
在傳統綠視率計算方法中,圖像識別可基于原始圖像分辨率進行計算,而方格測量則需要降低圖像分辨率以減少人工成本。但由于目前圖像分割技術所依托的開源數據集多為國外街景數據,應對本文研究對象住區綠地景觀則分割效果相對較差,往往人工方式的準確率較高,因此本文以方格網測量結果作為參照值進行對比。3種計算方式的綠視率對比見表1,從表中可以看出4種不同場景下點云模型與圖像識別的結果精度基本相當,視點2、3、4的誤差都在10%以內。圖像識別與點云模型誤差最大值均發生在視點1,點云模型的誤差值達77.69%,經分析原因有二:其一是現場的電動車及行人對植被產生了一定遮擋,但點云模型不存在這些冗余信息,所以計算結果為未被遮擋下的真實植被情況;其二是該場景中地下出入口周邊擋墻在點云模型中未能很好展現,導致綠視率計算結果偏高。

表1 不同方式下“綠視率”計算結果對比Tab.1 Comparison of GVR calculation results in different ways
(3)結果全面性。
針對特定視角而言,傳統方法與點云均可獲取到相應“綠視率”指數變化,而點云數據的分析優勢體現在其可以進一步提取全景視角下的三維空間信息,如三維視野體積。三維視野體積描述的是視點與某一景物之間的三維可視空間體積,可以進一步量化人們的空間感知。三維視野體積越小,說明觀察者與某一類景物之間的空間比較局促,包圍感更強。進一步可以利用三維視野體積定義“三維綠視率”指標,即植被的三維視野體積占總視野體積的百分比,更直觀地量化人與綠色空間的關系。以視點3為例,表2列舉了基于點云數據所得的多項三維空間信息。綜合對比所分析的4類景觀節點下的綠視率變化,不難發現,應對不同景觀環境特征時,基于LiDAR點云數據的綠視率分析均顯現較高的數據精準度,不僅能全方位提取出各類復雜景觀環境中的植被要素特征,更可以有效劃分出水體、游樂設施等多種景觀要素與綠化植被之間的空間關系。

表2 基于點云數據的“綠視率”計算結果Tab.2 GVR calculation results based on point cloud data
3)點云分析方法優勢。
對比3種分析方式下所得到的“綠視率”指數可發現,雖針對特定研究視角3種分析方式的計算結果差異相對較小,但如前文所述,基于三維點云模型的景觀空間形態分析優勢實則體現在“分析高效性”“結果全面性”“數據準確性”3個方面。具體而言,點云數據分析在大幅度提升景觀空間模型采集、建構及分析流程中轉換效率的基礎上,更加符合人群在實景空間中全景式的真實視覺感受,亦可反映出景觀空間中植被、建筑、構筑物等多種要素在各角度下的形態細節變化特征及相應指標變化,實現從人群真實視覺感受對景觀空間形態及各要素加以評估。而傳統景觀空間形態量化仍多以二維圖像為依托,存在分析視角的局限性,相關分析結果往往受到拍攝視角、區位等多方面因素影響,無法展現出景觀空間中多尺度、多視角下植被等復雜要素的形態變化特征。
4 討論及展望
4.1 價值與不足
本文所提出基于LiDAR點云的景觀空間“綠視率”量化分析方法相較于過往在精準度、計算效率等多個方面均有所提升,在景觀空間研究與實踐過程中均具有較高適用性。對于實踐而言,借助三維點云模型的形態量化研究將便于設計者及決策者更加清晰地了解景觀空間的形態特征及場地條件,從而輔助景觀空間的精細化評價、設計與營造;對于研究而言,基于LiDAR點云的景觀空間綠視率量化分析方法提升了既有風景園林領域研究的分析精度與效率,更適用于“生態”“人群”等多個方面與空間“形態”間的關聯性探討。
與過往研究相比,本文為實現在景觀空間研究全過程中充分利用LiDAR點云數據的優勢,不再僅局限于采集、處理與建模等環節,拓展了點云數據在“量化分析”中的運用可能。以“綠視率”指標為切入點展開了研究嘗試,借鑒于過往生態學及植物學領域中“體素化”的植被建模途徑,將復雜、細碎的植被形態轉化為可供分析計算的實體模型;并在此基礎上,在已轉化的點云模型中模擬真實的人眼視域特征,以分析評估各視角下植被的景深層次等變化。一方面,突破過往綠視率計算方式多依托于二維圖像分析的缺陷;另一方面,拓展了LiDAR點云數據的分析運用途徑。
但不可否認,基于點云數據的景觀空間形態量化研究在數據處理難度上仍存在一定局限性。既有研究及實踐中借助三維點云采集技術雖可精細化呈現出景觀空間中植被等復雜要素的物理形態特征,如通過三維點云數據對城市街道樹木整體形態及其枝干樹葉形態精確建模[21]、樹群間景觀格局與連通性[22]、城市三維綠量計算分析[23]等,但受技術限制,現階段對于單株植被等復雜要素的自動分割仍具有較高挑戰性。因此,目前在景觀空間量化研究中植被的形態仍有所簡化,需進一步探索如何精確量化其形態特征。
4.2 運用前景
從運用前景來看,基于三維點云模型的空間形態量化分析在未來的研究與實踐中均存在積極促進作用。不僅可以結合“健康城市”“碳中和”等當下發展挑戰對景觀空間形態加以量化探析,也可以輔助風景園林設計方案的生成與測試實踐場景開發。
結合當下發展訴求及所面臨的實際問題與挑戰,現階段景觀空間的相應研究手段愈發數字化及精細化。基于三維點云模型的景觀空間量化分析方法作為精準量化解析景觀空間形態特征的新途徑,不僅對傳統形態量化方法進行了優化提升,也拓展出更多景觀空間三維形態量化研究的可能性(如三維可視體積等),并可結合人群視覺偏好、心理健康、微氣候等多個方面的研究視角進行探索。例如,結合AR、VR、MR等虛擬呈現手段用于特定景觀環境中人群偏好及身心健康的評估。
與此同時,輔助設計方案生產及測試場景開發亦是基于三維點云模型形態量化研究的又一重要運用途徑,其對于設計場地特征的細節表現能力將極大推動當前設計實踐中的方法探索。可根據形態分析結果,對場地現狀點云模型進行拆解、重組并逐步優化,避免了實踐過程中的不必要操作。
注:文中圖片均由作者繪制。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
現代裝飾(2021年6期)2021-12-31 05:27:54
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
小學科學(學生版)(2020年12期)2021-01-08 09:28:10
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
少年漫畫(藝術創想)(2020年12期)2020-06-09 05:50:08
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
光學精密工程(2016年6期)2016-11-07 09:07:19
