基于高分辨率遙感圖像的道路提取研究*
2022-03-17 10:17:52李亞州池潤昊
計算機與數(shù)字工程 2022年2期
李亞州 池潤昊 宋 菲 徐 昇
(1.南京林業(yè)大學信息科學技術學院 南京 210037)(2.江蘇開放大學信息工程學院 南京 210017)
1 引言
隨著經(jīng)濟的高速發(fā)展,道路作為交通運輸?shù)幕緱l件帶動著經(jīng)濟的發(fā)展。信息化可以讓道路管理和規(guī)劃更加高效有序。隨著遙感技術的進步,圖像的分辨率越來越高,可以達到幾十厘米的精度,高分辨率的遙感影像為GIS 數(shù)據(jù)的更新提供了有利條件。遙感圖像的道路提取根據(jù)自動化程度可分為半自動道路提取和全自動道路提取:常見的半自動方法有動態(tài)規(guī)劃法、基于Snakes 或Active Contour 模型的方法、基于主動檢測模型的方法[1]。而全自動道路識別是道路提取發(fā)展的最終方向,在國內(nèi)外專家的探索中,常見的方法有[2~6]脊線探測法、啟發(fā)推理法、地圖匹配法、統(tǒng)計模型法、基于閾值分割和形態(tài)學提取、基于形狀特征提取等。
本文通過對高分辨率遙感數(shù)據(jù)的處理,利用機器學習和形態(tài)學的方法將圖像中的道路信息提取出來。對于遙感圖的高分辨這一特性,將圖像切割為尺寸較小的子圖。
對小圖進行方向梯度直方圖的特征提取,使機器學習道路的特征,自動檢測出道路的大致位置,最后對檢測出的小圖進行數(shù)學形態(tài)學處理,從而提取出道路信息,并對這一方法所取得的結果進行分析。
2 算法設計
2.1 直方圖均衡化與特征提取
灰度直方圖是通過統(tǒng)計圖像中各個灰度和灰度在圖像中出現(xiàn)的頻率,因此需要繪制出灰度的分布統(tǒng)計圖,來直觀地反映出灰度的分布情況。本文通過變換直方圖的方法增強圖像的視覺效果,即通過直方圖均衡化使得圖像具有比較高的對比度和動態(tài)范圍。此外,為了去除數(shù)據(jù)中噪聲帶來的影響,采用中值濾波這一非線性的平滑濾波,來過濾脈沖噪聲。實現(xiàn)的方法是以目標像素為中心設定一個M×N 的鄰域范圍,將范圍內(nèi)所有像素的值做統(tǒng)計排列,將中間位置的值作為目標像素的灰度值。為取得較好效果,研究在處理一個像素點時,自適應調(diào)整窗口大小。先判定當前區(qū)域的中值是否為噪聲點。如果是則擴大窗口尺寸去尋找更合適的中值。如果不是,則判定中心像素點是否是噪點,若否則保留原值,若是則使用中值代替原始值。
特征提取是圖像識別中核心的步驟之一。為了使計算機能夠認識圖像特征,需要將人類視覺中圖像的抽象描述轉(zhuǎn)換為如數(shù)值和向量等形式。HOG 特征(Histogram of Oriented Gradients)是統(tǒng)計圖像局部區(qū)域的梯度方向直方圖[7]來實現(xiàn)的。圖像中目標的表象和形狀能夠被邊緣方向的密度分布來描述,算法流程圖如圖1 所示。其中,Gamma校正是將圖像進行壓縮。光照對圖像的紋理產(chǎn)生比較大影響,校正可以有效地降低圖像的陰影。根據(jù)圖像的不同,可以通過改變矯正幅度,來調(diào)整圖像的顯示效果。
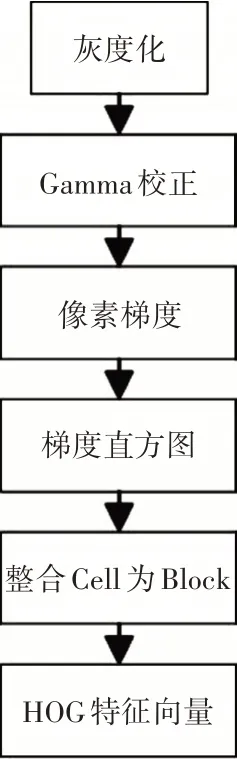
圖1 特征提取流程
在計算圖像橫縱坐標時候,分別使用[-1,0,1]算子和[-1,0,1]轉(zhuǎn)置算子對圖像進行卷積運算,使用式(1)和式(2)計算得出梯度幅值和梯度方向角。將圖像分成若干個單元格cell,在cell 這個小區(qū)域內(nèi)統(tǒng)計梯度方向的分布情況。道路檢測時角度范圍設定為180°,分為9 個方向。使用式(1)得出梯度大小進行加權。由于局部光照變化以及對比度變化,梯度強度變化較大,對梯度強度歸一化可以有效解決這一問題。將多個cell 組成一個大的連通的block 區(qū)間,根據(jù)block 形狀可以分為矩形區(qū)間和環(huán)形區(qū)間。最后將重疊的block塊連接合成一個特征向量。與其他特征提取方法相比,HOG特征提取在圖像的局部進行處理,對圖像光學的形變可以保持良好的不變性。本文將圖像拆分成小的cell,進行梯度方向直方圖化,通過調(diào)整cell 的大小來控制區(qū)域特征信息的精度以及保持特征不變。

2.2 分類器設計
BP 神經(jīng)網(wǎng)絡是一種運用反向傳播算法按照誤差反饋構建的人工神經(jīng)網(wǎng)絡[8]。BP 神經(jīng)網(wǎng)絡屬于一種多層神經(jīng)網(wǎng)絡,其特殊性在于網(wǎng)絡中的神經(jīng)元逐層連接,并且同一層內(nèi)的神經(jīng)元無法相互連接,使得誤差的反饋只能逐層進行。BP 神經(jīng)網(wǎng)絡能夠?qū)⒎弦蟮慕Y果輸出,而對于不符合的數(shù)據(jù)返回繼續(xù)處理。使用BP神經(jīng)網(wǎng)絡進行分類分為樣本訓練、識別和反饋。基本原理如圖2 所示。信息進入傳輸層和隱藏層,把結果傳輸?shù)捷敵鰧樱@個過程為正向傳輸過程。當計算結果達不到預期的要求時,調(diào)整系統(tǒng)參數(shù)重新計算,以此循環(huán)計算,直到結果符合預期的結果。
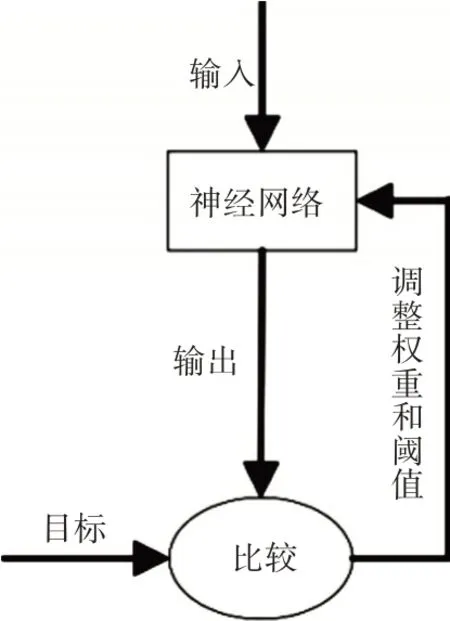
圖2 BP網(wǎng)絡分類
在分類中,本文采用的是一種量化共軛梯度法。傳統(tǒng)的梯度下降法將負梯度收斂,共軛梯度算法[9]則是將算出的負梯度方向與上一次搜索的共軛方向進行結合,計算出新的方向。因為共軛梯度在算法每一步時都需要重新計算方向,所以使得計算時間大大增加。量化共軛梯度法避免了耗時的一維線性搜索,使得網(wǎng)絡的訓練速度大大提升。
損失函數(shù)是判斷模型預測好壞的一種函數(shù),它可以很好地反映模型和實際之間的差距,常見的損失函數(shù)有0-1 損失函數(shù)、平方損失函數(shù)、損失函數(shù)、softmax損失函數(shù)[10]、交叉熵損失函數(shù)等[11]。
在二分類問題中,為了衡量神經(jīng)網(wǎng)絡輸出的向量和理想情況的接近程度,交叉熵是一種較好的評價方法。交叉熵設定了兩個概率分布p、q,p代表理想結果,q 代表神經(jīng)網(wǎng)絡輸出結果,其中兩者滿足p+q=1的關系。交叉熵的計算公式為

當熵的值越小,兩個概率的分布就越接近。
2.3 結果優(yōu)化
圖像處理方法在道路網(wǎng)的提取中有著廣泛的應用[12~13]。膨脹腐蝕是最常見的形態(tài)學變換[14],腐蝕操作能夠削減物體的邊界上較小的部分,膨脹可以使物體擴大,將原本斷開的兩個物體連接。開運算和閉運算是由腐蝕膨脹兩種運算組合而成的。開運算是先腐蝕再膨脹,閉運算則是先膨脹再腐蝕,運算時使用同一種結構元素。開運算使得圖像的邊緣變得更加的光滑,斷開細小的連接和消除邊緣細小的毛刺。閉運算也能使圖像邊緣變得光滑,填充圖像之間細小的連接并填充小的空洞[15]。開運算和閉運算是一種對偶操作。
本文在二值圖像通過腐蝕膨脹等處理過后,形成不同大小的相互分離的連通分量。本文將不同的連通分量進行標記,以便于對圖像的處理和統(tǒng)計分析。通過運用形態(tài)學的膨脹操作可以實現(xiàn)對每個連通分區(qū)分配唯一的編號。以8 連通進行操作,創(chuàng)建一個3×3 的結構元素S,對目標A 中的某一個點B 開始進行膨脹,每一次膨脹后的圖像與原圖像相交,就可以將生成的圖像限定在一個連通分量之內(nèi),從而實現(xiàn)對連通分量的提取。
3 實驗與分析
3.1 道路檢測
實驗中首先對圖像進行預處理,包括對圖像增強、濾波和拆圖。其次將圖像中包含道路的圖像和不包含道路的圖像分為正樣本和負樣本。通過HOG 特征提取將車道的梯度方向特征轉(zhuǎn)化為特征向量,使用量化共軛梯度算法將正負樣本放入BP神經(jīng)網(wǎng)絡中進行訓練。通過訓練出的模型對完整的高分辨率遙感圖進行目標檢測,將挑選出的圖像進行形態(tài)學處理得出二值化的道路。
本實驗研究的數(shù)據(jù)為高分辨率遙感圖像,數(shù)據(jù)的采集是通過與江蘇省測繪局合作獲得,數(shù)據(jù)的分辨率約為0.3m。實驗使用Matlab R2018a對圖像進行處理。圖像的處理過程如圖3 所示,下面簡單描述預處理過程。
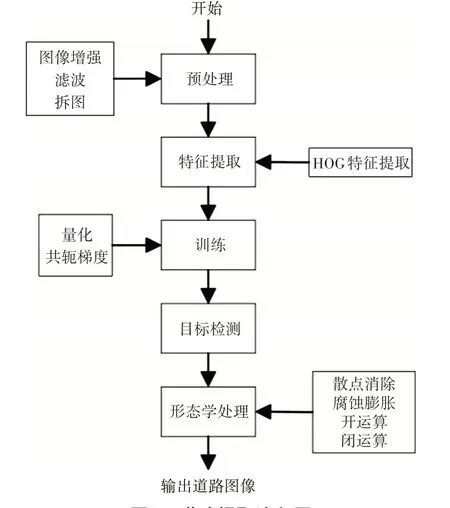
圖3 道路提取流程圖
如圖4 所示,預處理中將高分辨率遙感圖像分割為400×400 分辨率的小圖,使得軟件能夠更加快速地處理圖像數(shù)據(jù),將拆分的小圖寫入文件的“拆圖”目錄下,以便于之后的區(qū)分正負樣本。
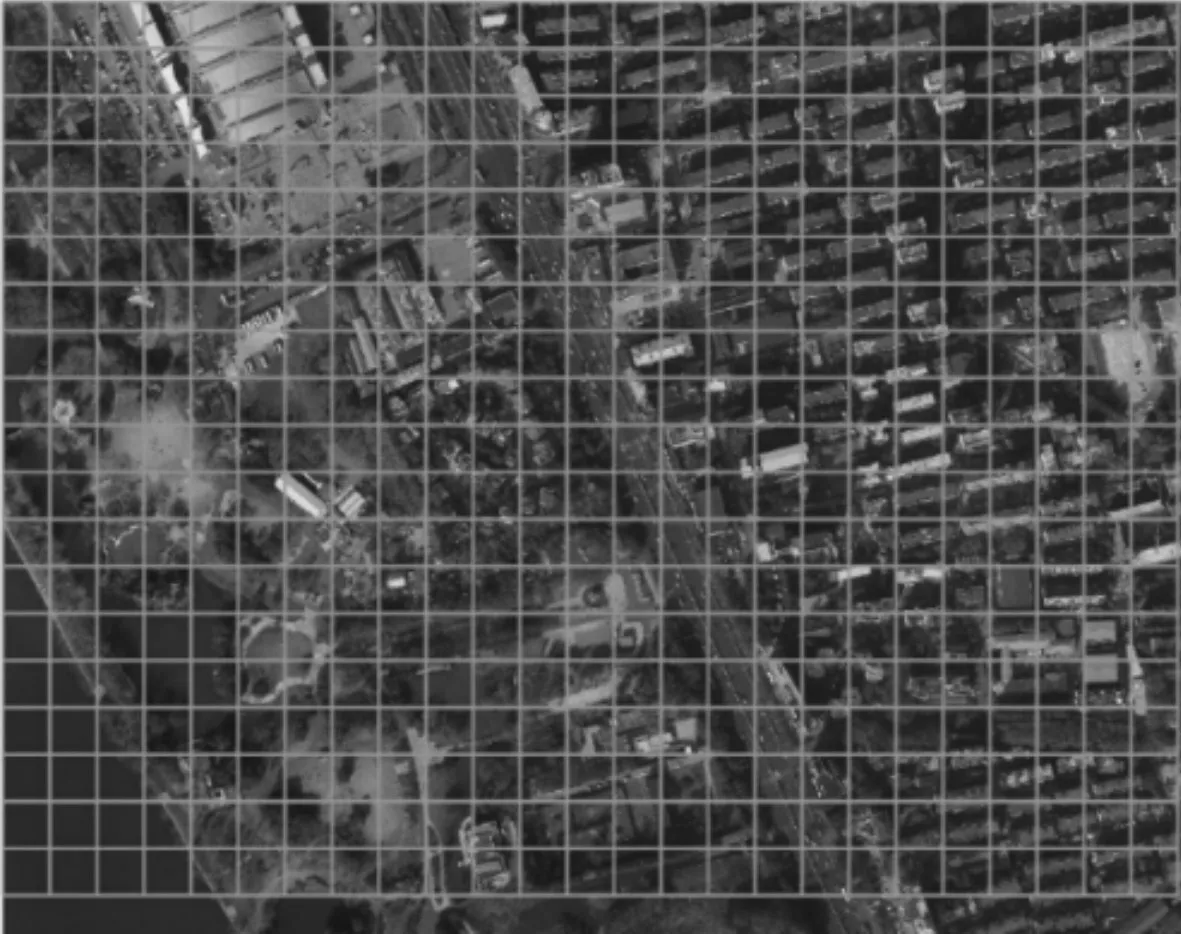
圖4 道路提取流程圖
將拆分好的圖像分為車道正樣本和車輛負樣本。共拆分出1900 張圖像,經(jīng)過挑選,其中有126張正樣本和1774 張負樣本。將區(qū)分的正負樣本分別計算每張圖片的梯度方向變化特征,為了便于計算,將拆分后的圖像壓縮為70×50的分辨率,將cell的尺寸設為10×10,將2×2 的cell 作為一個block 進行歸一化,將所有重疊的塊合成一個特征向量。
利用Matlab 使用三層BP 神經(jīng)網(wǎng)絡結構,由輸入層、隱藏層和輸出層組成,運用了量化共軛梯度算法進行訓練。使用交叉熵作為損失函數(shù)。經(jīng)過訓練后的得到神經(jīng)網(wǎng)絡模型,將完整的高分辨率遙感圖像拆分成小圖后進行識別,將檢測為道路的區(qū)域提取出來,圖5為識別出的道路區(qū)域。

圖5 目標檢測結果
3.2 結果細化
將識別為非道路的區(qū)域去除后根據(jù)圖像的灰度進行簡單的閾值分割。經(jīng)過測試道路部分的灰度大多數(shù)在0.2~0.35 之間,閾值分割后的圖像如圖6(a)所示。
由圖6(a)可以看出,閾值分割后題圖像主要由三部分組成,道路、道路周圍的樹木以及較為遠處部分樓房。其中道路部分圖像較為平滑,像素密度比較高,連通區(qū)域的面積較大,樹木部分主要在道路周圍,為細小的散點和細長的網(wǎng)狀結構,連通區(qū)域較小。由于道路中車輛紋路的干擾,車輛也會對道路的提取造成影響。
通過對道路中連通區(qū)域進行區(qū)域標記和統(tǒng)計,去除圖像中面積過小的散點,使用開運算,斷開道路主體周圍細小的連接,經(jīng)過測試使用半徑為6 的圓形結構體進行開運算可以達到比較好的效果,道路的邊緣更加平滑,道路周圍部分如圖6(b)所示,道路周圍植被的網(wǎng)狀結構由于開運算中的腐蝕作用被去除變成細小的散點,道路和周圍障礙物的連接被斷開。
對開運算后的圖像重復去除小區(qū)域和腐蝕膨脹后得到圖6(c)中左圖,其中右圖為高德地圖電子地圖進行閾值分割后的圖像,較為接近真實情況中的道路網(wǎng),經(jīng)過對比可以看出,經(jīng)過道路分類后,區(qū)域形態(tài)學處理過的圖像可以基本顯示出雙向四車道主道路和輔路的部分區(qū)域。圖6(d)為未采取區(qū)域分類處理的遙感圖像在形態(tài)學處理后的表現(xiàn),與圖6(c)(左)對比可以看出圖像的左側受到樓房建筑的干擾,圖像中存在許多非道路區(qū)域,對圖像提取造成困擾。對比實際情況準確率低。
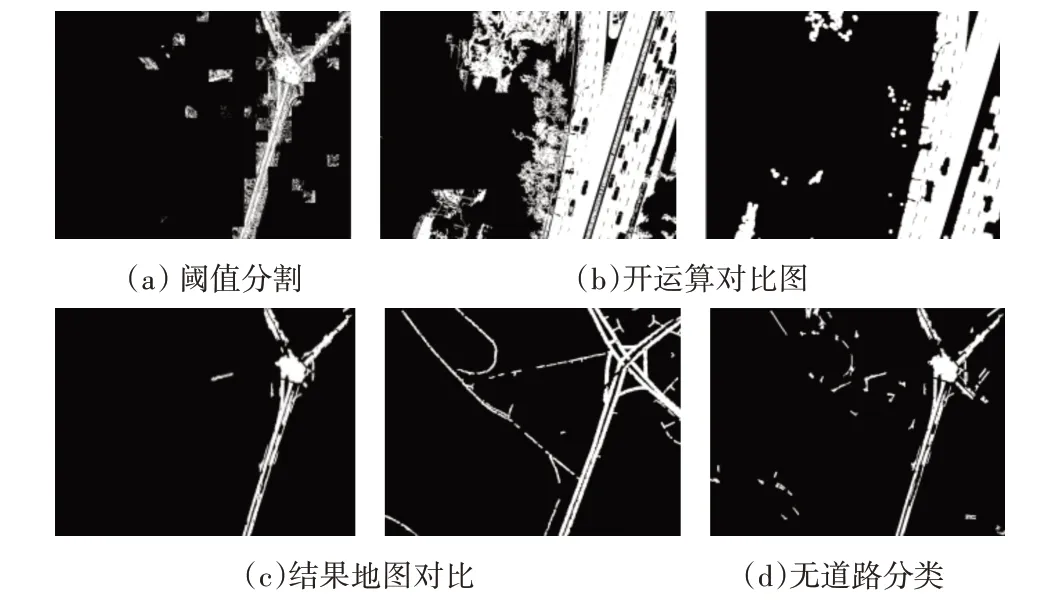
圖6 檢測結果識別過程
3.3 精度分析
經(jīng)過對多組遙感圖像的進行道路區(qū)域分類,將BP 神經(jīng)網(wǎng)絡分類出的圖片作為實驗結果,將人工分類出的遙感圖像區(qū)域作為真實結果,兩者進行對比,所得出的結果如表1所示。
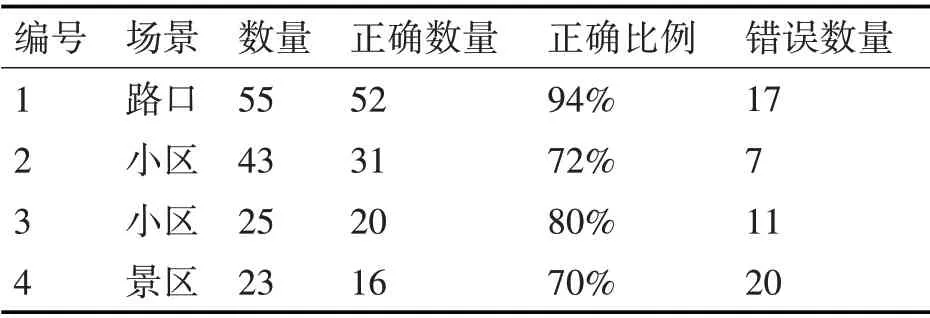
表1 區(qū)域分類結果
通過表格了解,對于不同的場景下,區(qū)域分類的結果并不相同,在類似于交叉路口的圖像中,有與道路占有比較大的比例,且多為雙向四車道主路,識別的準確度較高,且大多可以覆蓋道路的邊緣部分。在兩個景區(qū)的圖像中,主車道較少,小區(qū)間的道路大多為雙車道,路旁有大面積的樹木覆蓋,人眼不容易發(fā)現(xiàn),識別的準確率較低。在景區(qū)場景中,主道路覆蓋的面積比較少,同樣存在不容易看見的林間道路,景區(qū)內(nèi)比較空曠,存在于道路十分相似的區(qū)域,容易造成將非道路區(qū)域識別為道路區(qū)域。
將提取出的道路區(qū)域進行形態(tài)學處理后,所得到的圖像與高德地圖中的電子地圖進行對比,根據(jù)道路的種類不同分類,將各個部分所占圖像總像素的比例進行統(tǒng)計,將未采用道路分類方法稱為方法1,將采用道路提取的方法稱為方法2,表2 為對比結果。

表2 準確率對比結果
通過表2 可以觀察出,在對于主路的提取上,方法1 和方法2 兩種方法效果相差不大,對于主路的提取準確率和實際情況相差不大。在對小路的道路提取上,方法2 準確率略低于方法1。在提取結果上,方法1產(chǎn)生了較多的非道路區(qū)域,方法2對于非道路的誤提取則遠低于方法1。兩種方法在小路的提取上準確率都比較低,在圖5 的小區(qū)場景中,樹木較多地區(qū)的主路也未能識別成功。
4 結語
本文主要基于高分辨率遙感圖像對道路進行提取研究,實驗中運用BP 神經(jīng)網(wǎng)絡進行道路區(qū)域分類后提取道路的方法縮小了圖像處理的范圍,減少了對非目標的識別。精度表明,提出的方法在城市交通環(huán)境中,能有效識別主路和小路部分,同時能快速排除非道路區(qū)域。
道路提取的結果與如今成熟的地圖道路網(wǎng)絡相比仍然有很多的不足,存在許多需要改進的地方,主要有以下幾點。
1)對于訓練的樣本數(shù)量較少,在不同的生活場景下道路的形態(tài)變化比較大,對于非道路的負樣本收集較少,容易造成誤識別。
2)嘗試從不同維度進行特征提取,如對紋理、輪廓進行特征提取,使道路提取的準確率增加。嘗試優(yōu)化神經(jīng)網(wǎng)絡算法。
3)本次實驗并沒有考慮道路中車輛對道路提取的影響。道路區(qū)域分類對于道路兩旁有大量植被的情況沒有能夠檢測出,這一情況沒有得到解決,有待完善。
猜你喜歡
電子制作(2019年15期)2019-08-27 01:12:00
中國生物醫(yī)學工程學報(2017年6期)2017-02-10 05:11:45
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年5期)2015-04-09 11:30:52
噪聲與振動控制(2015年4期)2015-01-01 07:08:21
民生周刊(2012年10期)2012-10-14 09:06:46