三軸磁傳感器運動噪聲消除方法*
2022-03-17 07:47:26何永前
艦船電子工程 2022年12期
關鍵詞:信號
何永前 胡 淼
(湛江艦船保障大隊 湛江 524000)
1 引言[1~2,7]
相對于地磁場,艦船產生的磁信號很弱。為了能檢測出艦船磁信號,采用正交三軸磁通閥式磁傳感器來接收信號。通過對三軸磁傳感器運動噪聲產生機理的理論分析,發現產生噪聲的原因有:三軸磁引信接收機的三個軸不理想正交;三個軸靈敏度不一致;接收電路有漂移和噪聲;接收器磁芯有剩磁。
通過對正交三軸磁傳感器上三個軸輸出信號進行數學運算,從而得到外界磁感應強度矢量的模數,這就是正交三軸磁傳感器組成的磁標量接收方法。模數是一個標量,它與方向無關,見圖1。
如圖1所示,設BX、BY和BZ分別為磁傳感器的三軸輸出,則:

圖1 正交三軸磁傳感器在地磁場中的信號輸出
式(1)中,B為地磁場感應強度的模,θ為磁感應矢量B與接收器Z軸的夾角(磁傾角),φ為磁感應矢量與接收器X軸的夾角(磁偏角)。當磁傳感器在地磁場中產生運動,磁傾角θ和磁偏角φ會產生變化,造成磁傳感器的三個軸輸出BX、BY和BZ不斷變化。在一定的地理范圍內,磁感應模B保持不變,可采用如下公式:
通過運算可得T等于磁感應模B,說明T與磁傾角θ和磁偏角φ無關。由此可知,傳感器的運動不會影響T,也說明在運動中的傳感器能可靠檢測到目標信號。
但是,三軸磁引信接收機的三個軸不是理想正交的;三軸靈敏度不一致;接收電路有漂移和噪聲;接收器磁芯有剩磁。這些都會引起式(1)傳感器輸出值存在誤差。從而使經式(2)運算后的T不等于地磁感應模B。因此,傳感器在地磁場中運動時的信號輸出值個變化量。式(2)是一種非線性運算,式(1)的誤差經式(2)運算后將被放大,使傳感器在地磁場中運動時有很強的變化噪聲信號輸出。
2 磁傳感器三軸不正交所引起的運動噪聲
2.1 三軸磁傳感器在地磁場中的信號輸出[8]
如圖2所示,磁傳感器的三個軸分別為OX、OY和OZ,其輸出信號分別為BX、BY和BZ。正交坐標系OZ1軸與OZ軸重合;使YOZ與Y1OZ1共面,設OY1軸與OY軸夾角為β;OX軸在Z1OX1平面上的投影與OX1軸的夾角為α;Z1OX1平面與OX軸的夾角為γ。
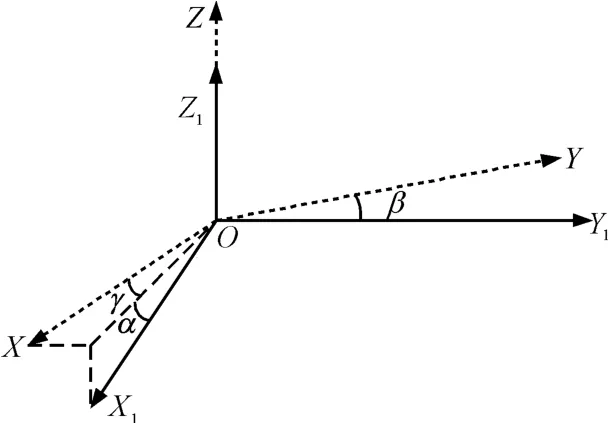
圖2 磁傳感器的三軸與座標軸的關系
輸出為
由于角度 α、β和 γ的值很小,所以有cosα≈1,cosβ≈1,sinγ≈γ,sinα≈α,sinβ≈β,cosγ=1。從而式(3)可化簡為
對上式取模運算并忽略二次小量得:
泰勒級數展開,并忽略高階項,可得:
將式(1)代入上式:
2.1.1 傳感器三軸不正交引起的運動噪聲
從式(5)可以看出,由于磁傳感器三軸不正交,使得取模運算后的輸出結果與地磁場磁感應矢量的模有誤差,這一誤差量為
ΔB與磁傾角θ、磁偏角φ有關,因此,傳感器在地磁場中運動時,將有變化的磁場信號輸出。
因此,ΔBm的取值范圍是
通過對ΔBm隨αm的變化進行估計運算得出,若要使傳感器任意轉動時,運動噪聲不大于400nT則傳感器正交度誤差不應大于0.5°。
2.1.2 傳感器靈敏度不對稱引起的噪聲
假設三軸傳感器輸出為BX、BY和BZ,外磁場的三個分量為BX1、BY1和BZ1,,以BZ軸的靈敏度為標準,有:
對上式取模運算得:
忽略高階量,并用泰勒級數展開,可得:
通過分析計算可知,當三軸靈敏度不對稱時,將產生很強的信號輸出,若要使輸出不大于450nT,則三軸靈敏度不對稱度必須小于0.01,當然,傳感器的線性度、精度等都必須高于這個量級。
2.2 傳感器三軸鐵芯剩磁和電路漂移引起的運動噪聲[10~11]
磁通閥式磁傳感器的鐵芯由玻莫合金制成,這種合金存在有剩余磁通,其矯頑力不為零,鐵芯的剩余磁感應強度可達幾千nT,而且隨時間是作緩慢變化的。此外,磁傳感器中的直流耦合電路會引起漂移和失調。鐵芯中的剩磁和電路漂移會在傳感器上迭加一個固定的信號,當考慮鐵芯剩磁和電路的漂移時,傳感器的輸出為
則傳感器運動時,輸出信號的變化量為
磁場變化最大值為
上式表明,由鐵芯剩磁和電路漂移引起的運動噪聲輸出,其最大值等于鐵芯剩磁和電路漂移等效磁場的合成。
3 三軸磁傳感器運動噪聲的消除方法[1,3,8,12]
根據前面的分析可知,由于三軸磁引信接收機的三個軸不是理想正交的;三軸靈敏度不一致;接收電路有漂移和噪聲;接收器磁芯有剩磁。傳感器實際的輸出和正交三軸磁傳感器理想的輸出間存在誤差,通過式(3)、(9)和(11)可得理想正交三軸磁傳感器輸出BX1、BY1和BZ1與實際磁傳感器的輸出BX、BY和BZ間關系為
其中:BX,BY和BZ為實際三軸磁傳感器輸出值;C11,C22表達了傳感器三軸靈敏度的不對稱性;傳感器三軸傳感器的正交度決定了C12,C13和C23的大小;BX0,BY0和BZ0為鐵芯剩磁和電路漂移。
對式(12)作線性變換可得如下:
式(13)表明,BX、BY和BZ是實際三軸傳感器的信號輸出值,BX1、BY1和BZ1為經線性變換后得到的理想正交三軸磁傳感器的信號輸出值。傳感器正交性和電路對稱性決定線性變換系數,鐵芯剩磁和電路漂移和噪聲決定了平移量hX、hY和hZ,通過計算得到線性變換的系數和平移量,從而消除運動引起的傳感器輸出噪聲。
采用以下方法來驗證噪聲消除方法的有效性,模擬產生一組實際三軸磁傳感器的輸出數據,將實際數據輸入單片機,單片機對實測數據進行處理,得到輸出數據B2,觀察B2數值是否平穩和B2(消噪后)與(沒有消噪)的差值,即可以知道噪聲消除方法的有效性及抗晃動功能能否實現。
表1列出了部分調試結果[6]。
轉動噪聲(curve2)與處理殘差(curve1)比較曲線如下[4~5]。
表1給出的數據能夠消除三軸磁傳感器運動噪聲能力為78.25dB。
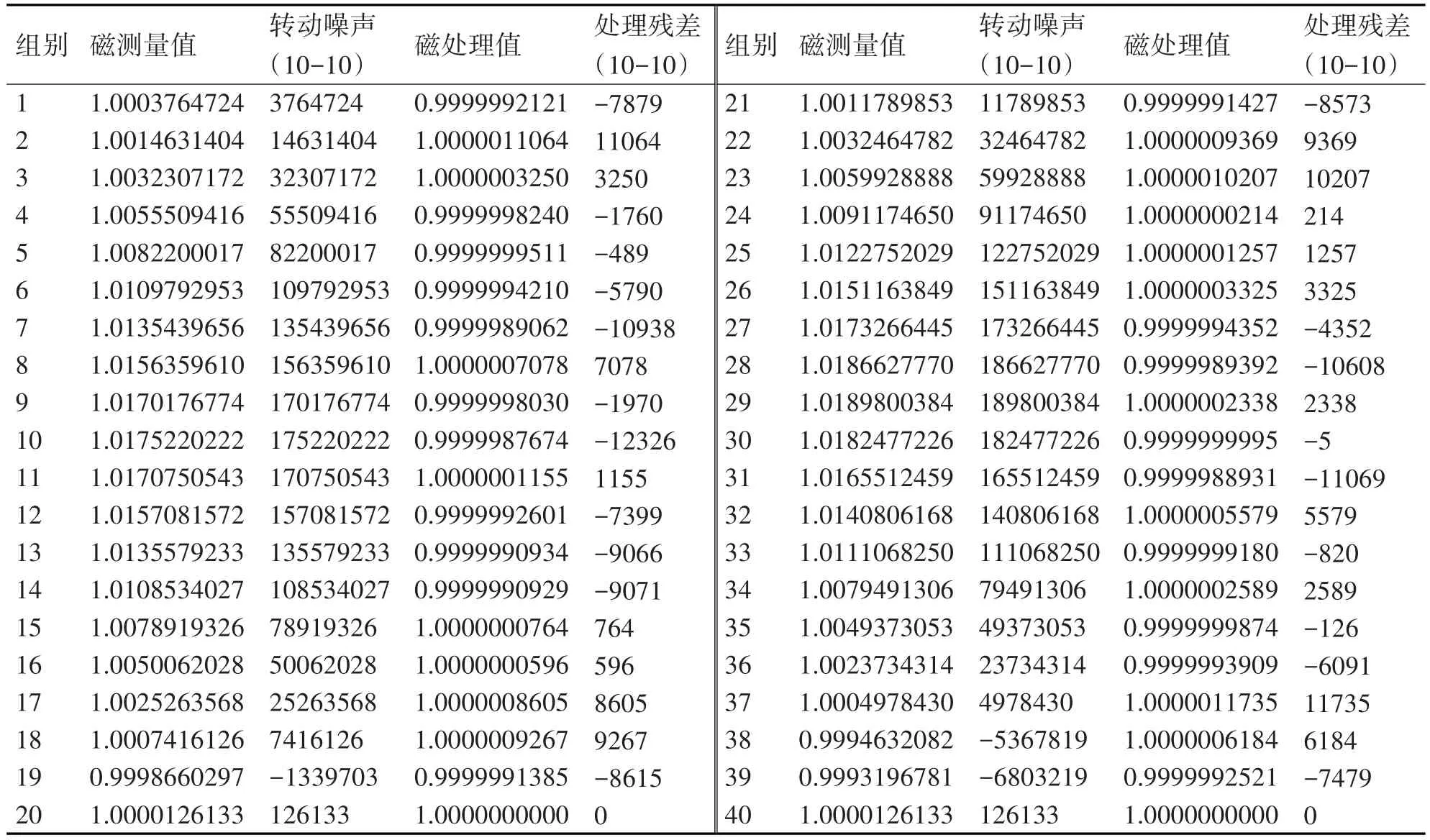
表1 三軸磁傳感器運動噪聲的消除方法調試結果
從圖3中的曲線比較可以看出,只要轉換系數能夠準確測定,使用三軸磁傳感器實施標量接收技術,雖然雷體運動時產生了很大的干擾信號,但經信號處理之后,可使運動噪聲很小。經過大量數據統計,設定合適的閾值,可以作為水雷引信使用。
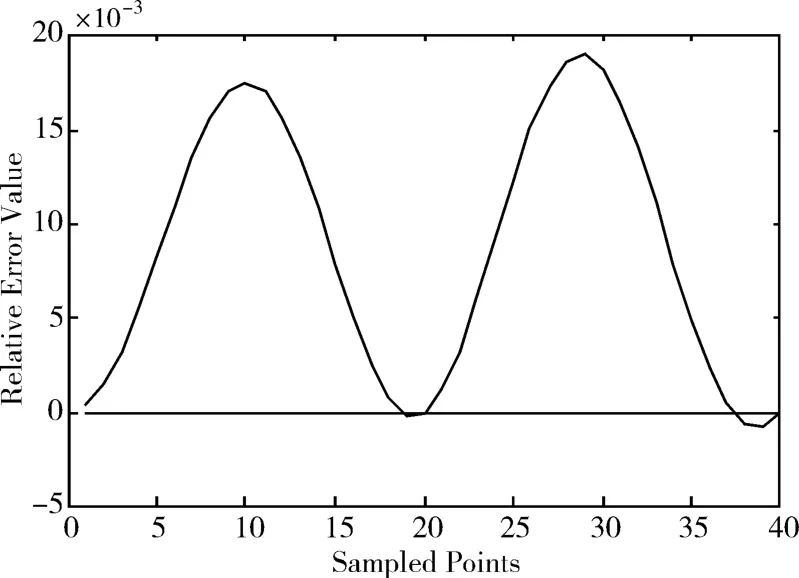
圖3 消噪前后相對誤差曲線
4 結語
實驗結果表明三軸磁傳感器運動噪聲的消除方法能夠較好地解決了三軸磁引信運動時引起的噪聲,提高了水雷引信的抗干擾性。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06