一種移動機器人路徑規劃方法的研究
2022-03-19 23:42:54周明龍程晶晶
電腦知識與技術 2022年2期
關鍵詞:移動機器人
周明龍 程晶晶

摘要:該文主要是設計了一種可擴展式移動機器人,提出了基于Levenberg-Marquardt方法優化的 EKF-SLAM算法、基于勢場蟻群算法的移動機器人全局路徑規劃,并探索了一種新的最優路徑搜索方法,即有機地將移動機器人局部路徑規劃融入全局路徑規劃中,并且通過機器人仿真實驗完成室內移動機器人的自主導航,相比傳統方法能夠提高KEF算法的定位精度以及穩定性,并結合仿真實驗驗證改進后的有效性,得出了位置預測結果更加準確,從而得到更優的路徑規劃。
關鍵詞:移動機器人;路徑規劃;自主導航
中圖分類號:F270 ? ? ? ?文獻標識碼:A
文章編號:1009-3044(2022)02-0010-03
近年來,科學技術的進步促使機器人在人民生活中應用越來越廣泛。作為機器人為人類提供高質量服務的基礎,面向機器人的定位正逐漸成為該領域的研究熱點。近十幾年來,機器人學界涌現出了各種各樣的針對SLAM問題的解決方案。其中,基于擴展卡爾曼濾波器(EKF)的EKF-SLAM方法獲得了廣泛的認可并被普遍應用,這種方法是通過測量含噪聲的變量的形式獲得運動過程中某一時刻的狀態得出估計值,最后根據反饋修正估計值。這樣,EKF-SLAM就能在不須了解機器人詳細性質的前提下,高效地對運動的過去、當前、甚至將來的狀態進行估計,但該方法的穩定性和定位精度仍有不足。
1 移動機器人硬件結構的技術方案
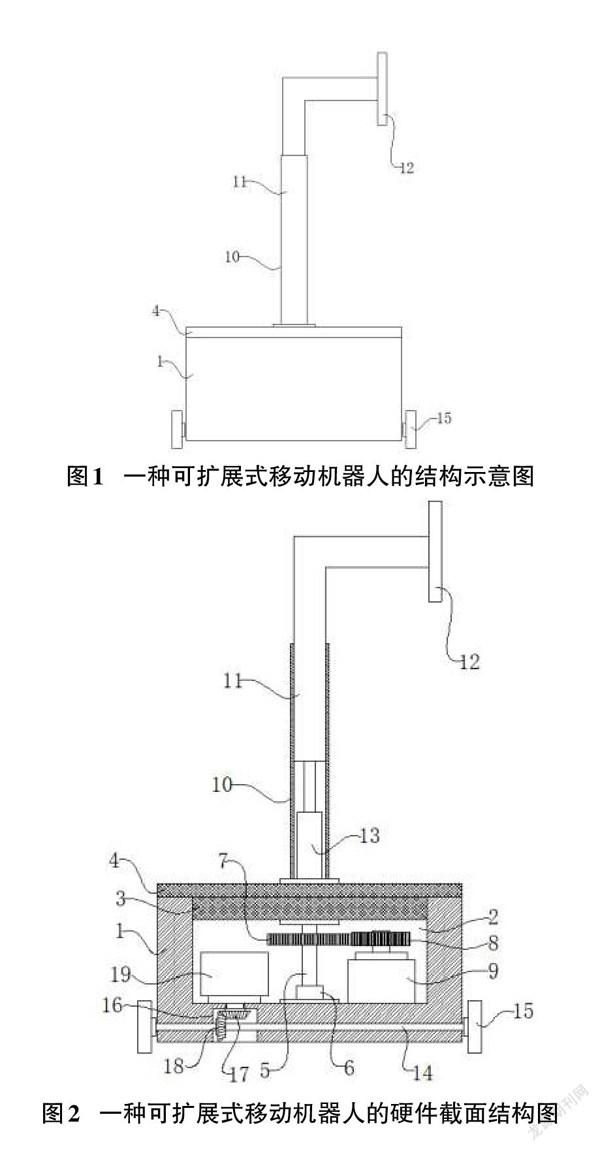
一種可擴展式移動機器人的硬件設計如圖1、圖2所示,其中,1-移動底座;2-操控凹槽腔;3-轉動臺;4-轉動基板;5-旋轉軸;6-軸套;7-直齒輪一;8-直齒輪二;9-旋轉電機一;10-主體管;11-L形滑桿;12-工具支板;13-電動推桿;14-輪軸;15-移動輪;16-缺口槽;17-錐齒輪一;18-錐齒輪二;19-旋轉電機二。一種可擴展式移動機器人包括移動底座,移動底座上開設有操控凹槽腔,所開設的操控凹槽腔的開口端轉動配合安裝設有轉動臺,轉動臺的底端面中間位置處固定連接旋轉軸的頂端,旋轉軸的底端通過軸套一體轉動配合安裝設置在操控凹槽腔內,旋轉軸上固定套設安裝有直齒輪一,直齒輪一嚙合傳動連接直齒輪二,直齒輪二固定套設安裝在旋轉電機一的輸出端,轉動臺的頂端面上設有一體結構的轉動基板,轉動基板的中間位置處垂直固定安裝設有主體管,主體管的內腔底部設置有電動推桿,主體管的內腔頂部滑動配合安裝有L形滑桿,電動推桿的伸縮桿端與L形滑桿之間相固定連接,L形滑桿的尾端固接設有工具支板。
使用時,通過移動底座1上所開設的操控凹槽腔2內安裝設置的旋轉電機一9轉動,從而帶動直齒輪二8嚙合傳動直齒輪一7旋轉,從而使得旋轉軸5帶動轉動臺3以及轉動基板4進行轉動,轉動臺3與操控凹槽腔2的開口端之間相轉動配合安裝設置,使得轉動臺3旋轉穩定,從而便于旋轉調節轉動基板4所需的應用的加工角度位置,操作便捷且方便;通過電動推桿13便于推送L形滑桿11沿主體管10進行滑移穩定,從而便于上下伸縮滑移L形滑桿11的支撐高度位置,其尾端固接的工具支板12的高度便于相對應調整使用,滿足所需加工高度位置,操作應用方便;通過旋轉電機二19帶動錐齒輪一17旋轉,從而嚙合傳動錐齒輪二18旋轉,使得輪軸14帶動移動輪15進行旋轉移送,使得移動底座1整體移動穩定且便捷。本技術方案結構簡單,裝配安裝方便,通過旋轉電機一經直齒輪二、直齒輪一依次傳動至旋轉軸進行轉動,使得轉動臺以及轉動基板旋轉穩定,便于旋轉調節轉動基板所需的應用的加工角度位置,操作便捷且方便;通過主體管內腔底部設置的電動推桿便于帶動L形滑桿進行穩定滑移,L形滑桿及尾端固接的工具支板的高度便于相對應調整使用,滿足所需加工高度位置,操作應用方便。
2 移動機器人路徑規劃方法的技術方案[1-2]
移動機器人路徑規劃方法可以用來解決穩定性和定位精度的問題。一種移動機器人路徑規劃方法的技術方案具體步驟如下:
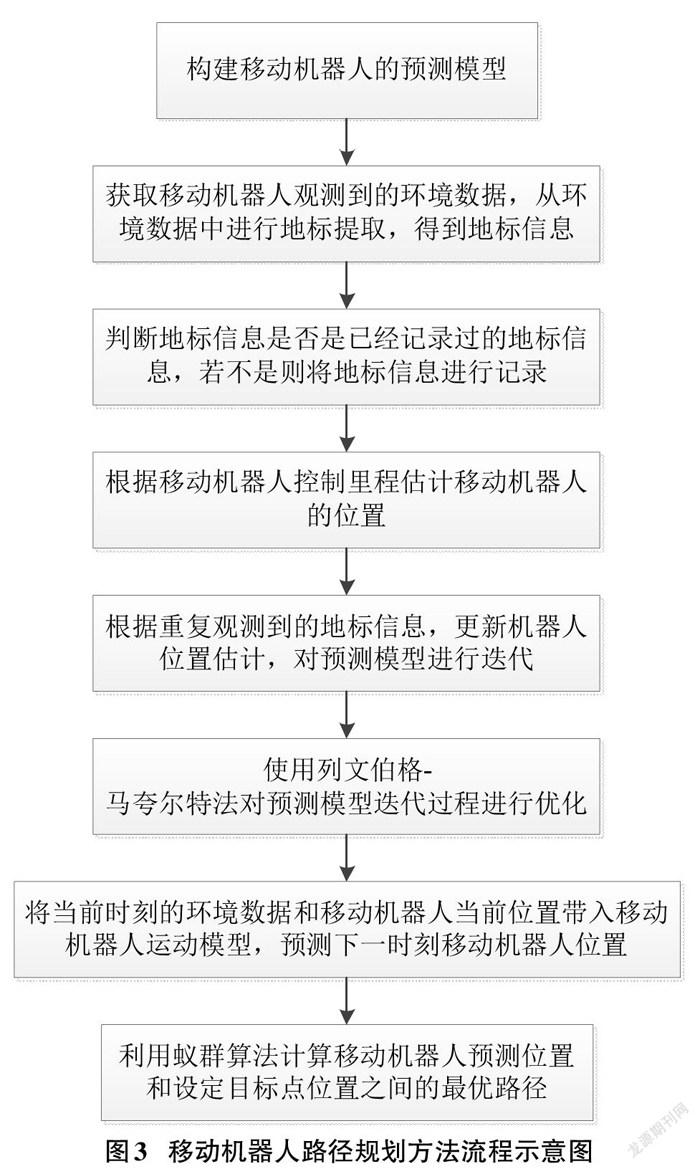
①構建移動機器人的預測模型;
②獲取移動機器人觀測到的環境數據,從環境數據中進行地標提取,得到地標信息;
③判斷地標信息是否是已經記錄過的地標信息,若不是則將地標信息進行記錄;
④根據移動機器人控制里程估計移動機器人的位置;
⑤根據重復觀測到的地標信息更新機器人位置估計,對預測模型進行迭代;
⑥使用列文伯格-馬夸爾特法對預測模型迭代過程進行優化;
⑦將當前時刻的環境數據和移動機器人當前位置帶入移動機器人運動模型,預測下一時刻移動機器人位置;
⑧利用蟻群算法計算移動機器人預測位置和設定目標點位置之間的最優路徑。
獲取移動機器人環境數據后,去除環境數據中的高斯噪聲,判斷地標信息是否是已經記錄過的地標信息,預測移動機器人當前位置能夠觀測到的地標信息;度量預測的地標信息與實際觀測的地標信息的馬氏距離,與設定閾值進行比較;若馬氏距離不超過設定閾值,則將兩個地標視為同一地標;協方差矩陣主要是通過移動機器人與地標之間的協方差以及移動機器人位置、地標的協方差組成的;根據移動機器人的控制里程、預測模型的雅克比矩陣對協方差矩陣進行更新,預測移動機器人當前位置;估計出機器人當前位置值和地標信息,從而預測出地表角度以及位置;計算測量模型的雅克比矩陣;計算雅克比矩陣的卡爾曼增益;利用卡爾曼增益計算新的狀態向量,得出當前機器人位置和各地標的位置;將新觀測到的地標信息加入預測模型中,更新預測模型;為達到降低算法的深度以及復雜度的目的,從而將人工勢場局部搜索優化算法融入計算過程中;為了提高隱含全局最優空間的信息素濃度,可以將信息素擴散柵格表和信息素擴散模型融入勢場蟻群算法中[3];計算完整路徑;通過幾何優化策略優化局部路徑獲得另一條完整路徑,并完成此相鄰路徑的信息素更新;比較各完整路徑,得出最優路徑。
3 移動機器人路徑規劃方法實施說明
本方法通過提出基于Levenberg-Marquardt 方法優化的 EKF-SLAM算法、基于勢場蟻群算法的移動機器人全局路徑規劃,探索一種新的最優路徑搜索方法,即有機地將移動機器人局部路徑規劃融入全局路徑規劃中,并且通過機器人仿真實驗完成室內移動機器人的自主導航,相比傳統方法能夠增加擴展卡爾曼算法的穩定性和定位精度。移動機器人路徑規劃方法具體實施步驟分為六步,具體如下[3-5]:
第一步:獲取移動機器人環境數據后,去除環境數據中的高斯噪聲,提高環境數據的可靠性。
第二步:判斷地標信息是否是已經記錄過的地標信息。預測移動機器人當前位置能夠觀測到的地標信息;度量預測的地標信息與實際觀測的地標信息的馬氏距離,與設定閾值進行比較;若所述馬氏距離不超過設定閾值,則將兩個地標視為同一地標。馬氏距離也稱為歸一化平方新息,是新息向量的加權范數。
第三步:根據移動機器人當前里程估計移動機器人的位置。協方差矩陣主要是通過移動機器人與地標之間的協方差(Covariance)以及移動機器人位置、地標的協方差組成的[1-2];預測移動機器人預測模型的雅克比矩陣;根據移動機器人的控制里程、預測模型的雅克比矩陣對協方差矩陣進行更新,預測移動機器人當前位置。在概率論和統計學中通常是通過協方差衡量兩個變量的總體誤差。兩個變量的協方差提供了這兩個變量相關程度的度量。多維隨機變量的研究主要是通過協方差矩陣來實現的。
第四步:根據重復觀測到的地標信息,更新機器人位置估計,對預測模型進行迭代。根據機器人當前位置的估計值以及記錄的地標信息計算地標位置和角度的預測值;計算測量模型的雅克比矩陣;計算雅克比矩陣的卡爾曼增益;利用卡爾曼增益計算新的狀態向量,得出當前機器人位置和各地標的位置;將新觀測到的地標信息加入預測模型中,更新預測模型。
第五步:利用蟻群算法計算移動機器人預測位置和設定目標點位置之間的最優路徑。將人工勢場局部搜索優化算法融入計算過程中;為了提高隱含全局最優空間的信息素濃度,可以將信息素擴散柵格表和信息素擴散模型融入勢場蟻群算法中;以當前路徑點的信息素為擴散源,引入擴散因子;計算完整路徑;通過幾何優化策略優化局部路徑獲得另一條完整路徑,并完成此相鄰路徑的信息素更新;
第六步:比較各完整路徑,得出最優路徑。
4 移動機器人路徑規劃方法的驗證實施路徑
4.1 移動機器人路徑規劃方法的驗證實施路線
以自主移動車輛作為移動機器人的模型,建立移動機器人系統模型,通過對移動機器人的同時定位與地圖構建、路徑規劃等方面進行深入的研究工作,提出了基于Levenberg-Marquardt 方法優化的 EKF-SLAM算法、基于勢場蟻群算法的移動機器人全局路徑規劃、融合移動機器人全局路徑規劃與局部路徑規劃的最優路徑搜索方法,并且通過機器人仿真實驗,完成室內移動機器人的自主導航。
4.2 移動機器人路徑規劃方法的算法原理[6-7]
為了蟻群算法的深度以及復雜程度,將人工勢場局部搜索尋優算法融入其中;為了提高隱含全局最優空間的信息素濃度,將信息素擴散柵格表和信息素擴散模型融入勢場蟻群算法中,以當前路徑點的信息素為擴散源,引入擴散因子。
仿真結果主要是比較不同方法以及最佳參數匹配和參數不同組合,從最優路徑的搜索以及算法時間、迭代深度等方面得出基于勢場蟻群算法的優勢。蟻群算法中螞蟻個體的搜索效率可以通過局部路徑的優化獲取其他完整的路徑,及時更新相鄰路徑的信息素,螞蟻個體具備對兩條完整路徑進行搜索的能力,蟻群算法的復雜度和深度得到了有效降低。
5 結束語
研究的移動機器人的路徑規劃方法主要是通過設計了一種可擴展式移動機器人,提出了基于Levenberg-Marquardt 方法優化的 EKF-SLAM算法、基于勢場蟻群算法的移動機器人全局路徑規劃以及探索了一種新的最優路徑搜索方法,即有機地將移動機器人局部路徑規劃融入全局路徑規劃中,并且通過機器人仿真實驗完成室內移動機器人的自主導航,相比傳統方法能夠提高KEF算法的定位精度以及穩定性,并結合仿真實驗驗證改進后的有效性,得出了位置預測結果更加準確,從而得到更優的路徑規劃。
參考文獻:
[1] 巨江.基于激光雷達的室內移動機器人SLAM研究[D].西安:西安電子科技大學,2019.
[2] 陳強龍.室內移動機器人路徑規劃方法研究[D].北京:北京工業大學,2019.
[3] 周明龍,程晶晶等.一種移動機器人路徑規劃方法[P].中國專利:CN201911312815.2.2020-05-08.
[4] 劉建華.基于智能優化算法的機器人路徑規劃與目標跟蹤方法研究[D].上海:東華大學,2017.
[5] 彭湘,向鳳紅,毛劍琳.一種未知環境下的移動機器人路徑規劃方法[J].小型微型計算機系統,2021,42(5):961-966.
[6] 唐嘉寧,潘蓉,周思達,等.融合模擬電勢場的改進人工勢場法研究[J].電光與控制,2020,27(12):69-73.
[7] 于振中,李強,樊啟高.智能仿生算法在移動機器人路徑規劃優化中的應用綜述[J].計算機應用研究,2019,36(11):3210-3219.
【通聯編輯:代影】
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中國慣性技術學報(2019年3期)2019-10-15 07:21:02
電子測試(2018年15期)2018-09-26 06:01:34
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統學報(2015年4期)2015-12-27 09:38:35
機電產品開發與創新(2014年5期)2014-03-11 16:42:32
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:09
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19
