基于預碰撞區域的切入場景自動化識別算法研究
2022-03-26 07:36:08曾杰廖偉丁雪聰胡雄
西南大學學報(自然科學版) 2022年3期
曾杰,廖偉,丁雪聰,胡雄
1.國家智能網聯汽車質量檢驗檢測中心(重慶)/招商局檢測車輛技術研究院有限公司,重慶 401112;2.重慶大學 機械與運載工程學院,重慶 400044
隨著自動駕駛系統在車輛上的快速應用,交通事故風險大大降低,其中L2級自動駕駛系統為駕駛輔助系統(Advanced Driving Assistance System,簡稱ADAS),具有自適應巡航和車道居中功能,可有效降低追尾碰撞[1]和側面碰撞[2]發生概率.ADAS系統可以帶來良好的駕乘舒適性,得益于中國汽車主機廠和造車新勢力的先進理念,ADAS或將成為標配功能[3].有資料表明:由于ADAS的不安全性和功能局限性[4-6],造成了多起事故.因此,公眾和政府逐漸關注ADAS的安全性和可靠性性能[7].自動駕駛系統(Autonomous Driving System,ADS)的可靠性和安全性能將通過實車測試和模擬測試進行測試[8-10],這需要大量有效的測試場景案例揭示ADS的局限性和缺陷.當前,典型的測試場景構建方法為基于試驗場構建的模擬測試場景[11-13],該方法不能覆蓋大多數邊緣案例,無法全面深入測試ADS[14].因此,研究真實道路中自動駕駛汽車可能遇見的場景,對于智能駕駛汽車的安全性測試至關重要,而切入場景是智能駕駛系統遭遇到的典型危險場景之一[15-16].場景數據的采集主要有車端場景數據采集、路側單元采集、空中俯視、封閉試驗場測試等方式[17-19],但完全自動化實現場景的標記與分類較為困難[20],一般做法是通過人工進行場景標記.人工標記方式主要是基于場景采集車的攝像機記錄視頻,或在場景發生時使用按鍵將預定義的場景標志插入到數據流中,并離線處理數據,存在效率低、成本高等問題.因此,研究一種自動化切入場景的標記與分類的算法,對提高場景數據處理與數據挖掘的效率和降低成本具有重意義.本研究基于多個環境感知傳感器搭建起了場景采集系統,并將采集系統部署至搭載了L2級自動駕駛系統的車輛.研究并提出了基于預碰撞區域的切入場景危險情況的檢測算法,在基于SCANeR軟件的仿真平臺上利用大量的測試用例對算法進行了測試.隨后,在不同車速和相對距離的切入場景下,以真實目標車輛在試驗場上進行了測試驗證.
1 場景采集系統搭建
場景采集系統由先進的多源異構環境感知傳感器組成,例如頂置的80線機械旋轉式激光雷達和兩個Mobileye Q3的目標檢測攝像頭,具體傳感器布局如圖1所示.旋轉激光雷達安裝在車輛頂部,4個固體激光雷達分別安裝在保險杠的前角和后角.當目標進入旋轉激光雷達的盲區時,4個固體激光雷達將向激光雷達傳感器融合模塊提供目標的點云,這些點云將增強目標檢測和跟蹤的可靠性和穩定性.前置攝像頭還可以輸出目標信息以及車道信息,用于計算穿越車道的時間,并檢測穿越車道的事件.雨量傳感器和光照傳感器用于記錄場景重建的環境條件.360°環視重編碼攝像機僅用于將圖像信息記錄到視頻中,用于檢查自動切割算法檢測到的場景的準確性.本研究識別切入場景的目標速度取樣于前向毫米波雷達提供,目標距離、角度和加速度信息取樣于激光雷達融合系統輸出數據,攝像頭識別結果作為數據備份使用.

圖1 場景采集傳感器布局及試驗車輛
場景采集系統配置如圖2所示,激光雷達系統的目標列表將進行預處理,其余傳感器的數據將直接傳輸到場景采集系統,根據各個傳感器的數據頻率特性,設計了相應的數據同步處理與記錄模塊.表1為識別切入場景目標的主要傳感器型號及精度,數據來源于相應的傳感器參數說明書.

圖2 場景采集系統構架示意圖

表1 主要傳感器精度
用于搭載場景采集系統的車輛為第三代哈佛H6,配備了L2級自動駕駛系統即ADAS,具有車道居中與全速域自適應巡航功能.真實的道路場景是隨機發生的,目標車輛的運動由于道路的不平整度或坡度而不平穩.此外,如果場景采集系統車輛的運動也處于不穩定狀態,那么這種方法收集到的場景可能會給軟件或地面測試中場景的重構帶來很多困難.因此,場景采集系統車輛的行駛方式應確保車輛始終保持在車道中心,并在大多數時間內以恒定速度行駛,通過這種方法收集到的場景可以相互一致,并且場景的穩定性也將大大提高.
在試驗場地對駕駛員和車輛自動系統駕駛之間的速度保持能力和相對于車道的橫向位置保持能力進行了試驗比較.測試方法為:選擇3名駕駛員進行測試,駕駛員將速度保持目標設置在50 km/h,車道保持目標為車道中心行駛,跟隨以50 km/h的恒定速度前方目標車輛.彎道的車道曲線半徑為500 m,測試系統以很高的精度獲取車輛的行駛數據.
選取3名駕駛員中駕駛表現最好的結果與車輛的自動駕駛系統進行對比,速度保持和相對于車道的橫向位置的結果如圖3.圖3a所示的速度曲線急劇下降部分和圖3b橫向距離急劇變化部分,分別為試驗結束駕駛員主動減速和駛出彎道的結果.根據對比結果發現,駕駛員駕駛速度總是在3 km/h的范圍內變化,但車輛的自動駕駛系統駕駛的速度幾乎是恒定的.駕駛員駕駛偏離中心車道的最大橫向位置分別為0.2 m、0.4 m、0.3 m,不能很好將車輛保持在車道中間,車輛的ADAS能將車輛始終保持在車道中心0.1 m的范圍之內.

圖3 L2自動駕駛系統與駕駛員的車速保持與行駛路徑偏移情況對比
基于以上分析結果,使用帶有L2級自動駕駛系統的場景采集車的原因如下:
1)不同的駕駛員有不同的駕駛習慣,收集的數據會受到駕駛員個人駕駛習慣的影響,收集的少數駕駛員的場景在統計上并不顯著.
2)具有主動安全功能的車輛生成的場景是ADAS與外部環境之間的博弈,不應受駕駛員主觀駕駛行為的影響.
3)ADAS在車輛方向控制和速度控制方面更穩定,采集的數據更穩定,提高采集場景數據的一致性.
2 切入場景識別算法
2.1 基于預碰撞區域的切入場景識別算法
場景采集系統采集傳感器融合的數據流,通過該算法自動檢測出危險場景,將有用的、合理的場景從海量數據中分離.場景識別算法主要基于自車車輛(SV)和目標車輛(TV)之間的預碰撞風險評估算法,圖4展示了SV和TV可能發生碰撞時的參數構成.

圖4 碰撞區域—場景參數示意圖
碰撞危險區的寬度尺寸由公式(1)和公式(2)計算得出.Ws與SV的當前速度有關.
Ws=Wsv×Vsvx×Fs
(1)
Rs=(Vsvx-Vtvx)×TTCm
(2)
Vsvx和Vtvx是指SV在其坐標系中的前進速度和橫向速度.系數Fs用于調整碰撞危險區的寬度,Wsv是SV的寬度.TTCm是控制碰撞危險區經度維度的因子,TTCm設置為4.0.當SV在當前移動狀態下到達碰撞點時的碰撞時間(Tc)由公式(3)給出.
Tc=Rlon× (Vsvx-Vtvx)-1
(3)
SV和TV之間的橫向位置為Rlatc,當SV到達碰撞點時,Rlatc由公式(4)給出.
Rlatc=Rlats-Tc×Vtvy
(4)
用于檢測碰撞風險的指數Fc由公式(5)給出.如果Fc≥0,表示存在碰撞風險;Fc<0,則表示TV已離開或未到達碰撞危險區.
Fc=Ws× 0.5-Rlatc
(5)
如果算法在時刻Ti(以秒為單位)檢測到碰撞風險,則對Ti前后7秒內的數據進行保存,長度為15秒的數據滿足場景復現的時長需求.
2.2 場景分類算法
圖4顯示了SV前方的碰撞風險區域,該區域分為3個不同區域.區域1為不可預防碰撞區域,區域2為緊急制動區域屬于非舒適區域,區域3階段為低碰撞風險區域屬于舒適區域.公式(6)和公式(7)給出了區域1的設計方法.
(6)
(7)
Ru和Wu為用于調整相應區域寬度和長度的參數,amax是SV全力制動時能達到的最大減速度.
公式(8)和公式(9)給出了區域2的設計方法.
(8)
(9)
區域2的asv=4.0~8.0 m/s2,區域3的asv=0~4.0 m/s2.區域3的尺寸設計由公式(10)給出,寬度尺寸由公式(9)計算.
(10)
3 算法仿真與實車驗證
3.1 算法仿真
本研究使用SCANeR場景仿真軟件用于算法驗證,搭建起如圖5所示的算法仿真平臺.根據預定義切入場景關鍵參數的邊界和步長值,使用SCANeR exploer工具化自動生成測試用例和相應的可執行仿真文件集合.在C++中,將場景檢測算法編譯為可執行程序,并嵌入SCANeR場景仿真回路中,算法程序在共享內存中,自動運行進程并獲得速度、距離、加速度等信息.該算法平臺可實現自動化加載不同參數的測試用例,并保存測試結果.

圖5 基于SCANeR場景仿真軟件的算法仿真平臺
測試算法的場景描述:TV觸發變道前,SV沿前車道中心線勻速行駛,TV與SV保持一定橫向距離行駛,當TV與SV的縱向距離達到表2中預設值時,TV以SV的行駛車道中心線為變道目標開始以勻速橫向速度進行變道.根據采集到的實際道路的切入場景、相關測試規程數據、以及長期從事測試場景構建的經驗參數,測試用例生成算法所使用SV和TV運動參數的邊界范圍,由表2所示,范圍能夠覆蓋極端、典型的前車切入工況.測試用例Case(i,k,m,f,g)由公式(11)計算.

表2 測試用例參數范圍表

(11)
式中,Vsvx為SV縱向速度,Vtvx為目標車縱向速度,Vtvy為目標車橫向速度,Rlon為SV與TV相對縱向距離,Rlat為SV與TV相對橫向距離.
生成測試用例Case(i,k,m,f,g)的程序如圖6所示,測試用例的目標為TV的切入動作會對SV造成碰撞風險,生成測試用例的約束條件:1)Vsvx>Vtvx;2)滿足第2.1節公式(5)的要求.設置區域1的amax=8.2m/s2、區域2的asv=[4.0,8.0]m/s2、區域3的asv=[ 0,4.0]m/s2,參數Ru=2.2m,Wu=1.3m,Fs=1.25.根據如圖6所示的場景生成與評估流程,使用SCANeRexploer自動生成了約85萬個測試用例,根據測試用例評估算法評估后剩余約7.2萬個場景,根據測試用例分類方法分為如圖7所示的3類測試用例.利用圖5所示的仿真平臺,對提出的場景識別算法進行自動化仿真測試,仿真結果如圖7所示.結果標明,本研究提出的基于預碰撞區域的切入場景識別算法在3個不同切入階段均能達到約92%的識別率,但算法對不可預防碰撞場景的識別率相對低于區域2和區域3.

圖6 測試用例生成及評估與分類方法

圖7 算法仿真測試結果
3.2 實車驗證
基于重慶機動車強檢試驗場的內部試驗道路,選取一段直線道路和彎道用于切入識別試驗.切入試驗時的場景如圖8所示,圖8中綠色框中選擇的車輛表明目標車輛已正確識別.切入試驗結果如圖9所示,為SV與TV的相對距離、相對速度和TTC隨時間變化的曲線.

圖8 切入場景示意圖

圖9 典型切入場景測試結果
第3.1節生成的仿真測試用例無法完全在實車測試中進行有效驗證.本研究使用以下方法來減少測試數量并獲得最具代表性的測試用例.
步驟1 減少每個值矩陣的樣本量,并選擇具有代表性的值如下:
Vsvx=[30,50,80,100,120]
Vtvx=[10,30,50,80]
Vtvy=[4,8,12,16,20]
Rlat=[3,4,5,6]
Rlont=[20,30,50,60,70,120,150]
步驟2 采用正交試驗設計
用正交試驗設計,得到110個試驗案例.為了完成切入,需要滿足Vsvx>Vtvx的要求,消除Vsvx≤Vtvx的情況,并選擇典型的11個測試用例.每個測試用例測試10次,共進行110次測試.測試用例設計和測試結果如表3所示.結果表明,識別成功次數為101次,識別率為92.1%.
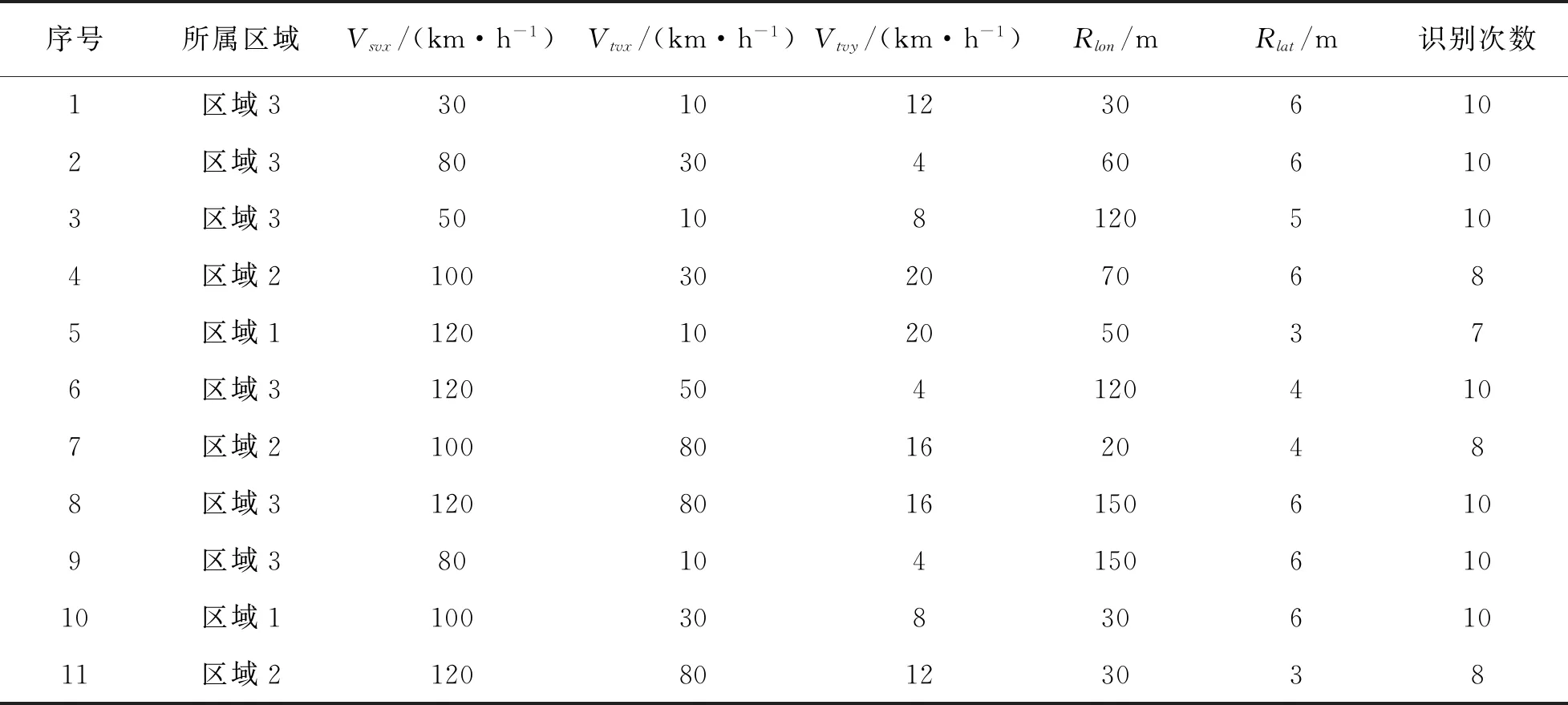
表3 實車測試驗證結果
通過分析可以發現,無法識別的試驗場景具有共同特征,即工況處于區域1和區域2.主要原因為:1)當目標車輛速度過快時,容易發生識別故障.2)當橫向速度過快時,切入過程較短,目標傳感器獲得的有效數據較少,導致識別失敗.3)當切入點的橫向距離過短時,識別也容易失敗,原因是切入動作突然,系統響應時間不足.
4 結論
在有限的測試用例下,通過仿真測試平臺和真實測試驗證的方法對本研究提出的切入場景識別算法進行了驗證,識別正確率約能達到92%.因此,本研究提出的算法對于切入場景檢測和分類應用具有一定的參考價值.然而,由于感知傳感器的局限性,區域1的檢測率有待進一步提高.在后續的工作中,將利用場景采集車,進行大規模的路試數據采集,覆蓋更全面的場景,不斷完善本研究所提出的算法,進一步提高場景識別率.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
