基于有限時(shí)間引導(dǎo)律的欠驅(qū)智能船舶循跡控制
2022-03-29 07:55:12馮輝胡勝余文曌徐海祥
北京航空航天大學(xué)學(xué)報(bào) 2022年3期
關(guān)鍵詞:船舶
馮輝,胡勝,余文曌,*,徐海祥
(1.高性能船舶技術(shù)教育部重點(diǎn)實(shí)驗(yàn)室,武漢 430063; 2.武漢理工大學(xué) 船海與能源動(dòng)力工程學(xué)院,武漢 430063)
在大數(shù)據(jù)和人工智能等新興技術(shù)的影響下,研究無(wú)人化、綠色和安全的智能船舶已是大勢(shì)所趨。作為智能船舶關(guān)鍵功能之一,智能航行受到了廣泛的關(guān)注并得到了迅速的發(fā)展[1]。其中,循跡控制是實(shí)現(xiàn)智能航行功能的關(guān)鍵技術(shù)之一。
循跡控制是指控制欠驅(qū)智能船舶沿著一條預(yù)定的路徑航行,并且這條路徑與時(shí)間無(wú)關(guān)[2]。目前,國(guó)內(nèi)外關(guān)于循跡控制的研究已有較多成果。Encarna??o等[3]在Serret-Frenet坐標(biāo)系中依據(jù)期望路徑重新定義輸出信號(hào),將控制目標(biāo)轉(zhuǎn)化為位置誤差和艏向角誤差,但缺點(diǎn)是控制器的設(shè)計(jì)十分復(fù)雜。為了簡(jiǎn)化控制器的設(shè)計(jì),有學(xué)者將循跡控制系統(tǒng)分為2個(gè)子系統(tǒng):引導(dǎo)律和控制系統(tǒng)[2]。在獲得路徑信息和環(huán)境信息后,引導(dǎo)律計(jì)算出控制系統(tǒng)的輸入信號(hào),即期望艏向角;控制系統(tǒng)則產(chǎn)生相應(yīng)的控制信號(hào),使船舶的實(shí)際艏向跟蹤引導(dǎo)律給出的信號(hào),完成循跡控制目標(biāo)。
LOS(line-of-sight)引導(dǎo)律[4]因其結(jié)構(gòu)簡(jiǎn)單、收斂性好等優(yōu)點(diǎn)而被廣泛應(yīng)用于循跡控制。但在實(shí)際運(yùn)行環(huán)境中,船舶受到風(fēng)浪流等環(huán)境因素的干擾,即橫向環(huán)境力的作用,在循跡過(guò)程中會(huì)存在漂角。但欠驅(qū)動(dòng)結(jié)構(gòu)無(wú)法產(chǎn)生橫向的控制力,因此船舶的實(shí)際運(yùn)動(dòng)軌跡將偏離期望的運(yùn)動(dòng)軌跡,限制了傳統(tǒng)LOS引導(dǎo)律的應(yīng)用。因此,如何減小漂角對(duì)循跡效果的影響是目前的研究熱點(diǎn)。
減小漂角影響的一種最直接的方法就是測(cè)量漂角。文獻(xiàn)[5]使用加速度計(jì)測(cè)量橫向和縱向的加速度,再通過(guò)積分得到橫向和縱向速度,進(jìn)而計(jì)算出漂角,但缺點(diǎn)是加速度的測(cè)量值易受噪聲的污染從而導(dǎo)致計(jì)算出的速度存在較大的誤差。文獻(xiàn)[6]利用全球?qū)Ш较到y(tǒng)計(jì)算漂角,但成本較高且精確性較差。另一種方法是利用積分LOS(ILOS)引導(dǎo)律。B?rhaug等[7]針對(duì)傳統(tǒng)LOS引導(dǎo)律無(wú)法抵抗環(huán)境干擾的問(wèn)題,提出了一種應(yīng)用廣泛、具有積分作用的ILOS引導(dǎo)律,并證明了其全局一致漸進(jìn)穩(wěn)定性。文獻(xiàn)[8-9]在B?rhaug等[7]的基礎(chǔ)上,在設(shè)計(jì)引導(dǎo)律時(shí)考慮了航速,簡(jiǎn)化了參數(shù)調(diào)整過(guò)程,但使得該算法的響應(yīng)速度易受航速的影響。文獻(xiàn)[10]針對(duì)直線接圓弧路徑不連續(xù)問(wèn)題提出了一種參數(shù)化ILOS引導(dǎo)律,使控制輸出更加平滑,但引導(dǎo)效果易受期望路徑插值的邊界條件影響。文獻(xiàn)[11]設(shè)計(jì)時(shí)變?cè)鲆娴腎LOS引導(dǎo)律減小位置超調(diào),但前向距離的上限和下限難以確定。文獻(xiàn)[12]提出一種自適應(yīng)ILOS(ALOS)引導(dǎo)律,將漂角視為固定參數(shù),通過(guò)設(shè)計(jì)自適應(yīng)項(xiàng)估計(jì)漂角。文獻(xiàn)[13]在引導(dǎo)系統(tǒng)建模時(shí)考慮流速的影響,提出了一種直接ILOS引導(dǎo)律和間接ILOS引導(dǎo)律用以應(yīng)對(duì)時(shí)變的海流,但無(wú)法應(yīng)對(duì)其他未建模環(huán)境干擾的影響。文獻(xiàn)[14]設(shè)計(jì)了一種降階的擴(kuò)張狀態(tài)觀測(cè)器,用來(lái)估計(jì)由外部干擾引起的時(shí)變漂角,但未考慮引導(dǎo)系統(tǒng)的有限時(shí)間穩(wěn)定性。
近年來(lái),有限時(shí)間控制方法因其更好的控制性能受到了廣泛的關(guān)注,并得到了迅速發(fā)展[15]。文獻(xiàn)[16]利用有限時(shí)間收斂的干擾觀測(cè)器,以估計(jì)時(shí)變的大漂角,提高了曲線循跡的精確性。文獻(xiàn)[17]提出了有限時(shí)間收斂的引導(dǎo)律,其不僅證明了漂角觀測(cè)器的有限時(shí)間收斂性,還證明了位置跟蹤誤差的有限時(shí)間收斂性,但該方法的缺點(diǎn)是漂角的估計(jì)值易受傳感器測(cè)量噪聲的影響。
本文在現(xiàn)有國(guó)內(nèi)外研究的基礎(chǔ)上,提出了一種基于自適應(yīng)控制理論的有限時(shí)間引導(dǎo)律,其控制參數(shù)可隨橫向偏差的變化而進(jìn)行自適應(yīng)調(diào)整,提升引導(dǎo)系統(tǒng)的響應(yīng)速度,同時(shí)可適用于風(fēng)浪流等環(huán)境載荷干擾下的欠驅(qū)智能船舶循跡控制,用于補(bǔ)償船舶在循跡過(guò)程中受到的流載荷的干擾,并證明了該引導(dǎo)律的有限時(shí)間穩(wěn)定性。通過(guò)仿真實(shí)現(xiàn)了欠驅(qū)智能船舶水平面內(nèi)的直線和曲線循跡,并進(jìn)行了仿真對(duì)比實(shí)驗(yàn)。
1 問(wèn)題描述
1.1 船舶數(shù)學(xué)模型
欠驅(qū)船舶的水平面三自由度運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)方程如下[2]:

式中:η=[x,y,ψ]T為船舶在固定坐標(biāo)系下的位置,x、y、ψ分別表示船舶在固定坐標(biāo)系中的橫坐標(biāo)、縱坐標(biāo)、艏向角;R(ψ)為坐標(biāo)系旋轉(zhuǎn)矩陣;υ=[u,v,r]T為船舶在運(yùn)動(dòng)坐標(biāo)系下的運(yùn)動(dòng)速度,u、v、r分別表示船舶在運(yùn)動(dòng)坐標(biāo)系中的縱向速度、橫向速度、轉(zhuǎn)艏角速度;M為包含水動(dòng)力附加質(zhì)量的慣性矩陣;C為包含附加質(zhì)量的科里奧利向心力矩陣,由船舶自身和附加質(zhì)量共同作用產(chǎn)生;D為阻尼系數(shù)矩陣;B為控制輸入配置矩陣;τ=[τu,0,τr]T為控制輸入矩陣,τu為船舶縱向推力,τr為轉(zhuǎn)艏力矩。

因此,可以通過(guò)在式(1)的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)方程中加入海流的速度,建立流載荷干擾下的船舶操縱運(yùn)動(dòng)方程,如下:

式中:υr=υ-Vc為船舶相對(duì)海流的速度。
1.2 有限時(shí)間穩(wěn)定性
有限時(shí)間穩(wěn)定是指系統(tǒng)狀態(tài)能在有限時(shí)間內(nèi)收斂到平衡點(diǎn)。考慮如下系統(tǒng):

式中:x(t)表示系統(tǒng)狀態(tài);f:→Rn為包含原點(diǎn)的定義域 到n維空間Rn中的一個(gè)連續(xù)函數(shù);0∈Rn表示零向量。


1.3 引導(dǎo)律
引導(dǎo)律的推導(dǎo)是在一個(gè)二維平面內(nèi)完成的,其中,期望路徑通常由一系列路徑點(diǎn)(xp(θ),yp(θ))相連組成,如圖1所示,其中θ為大于零的路徑參數(shù)變量。圖中:γp為期望路徑上任意一點(diǎn)處的切線與正北方向的夾角,即Serret-Frenet坐標(biāo)系與固定坐標(biāo)系之間的旋轉(zhuǎn)角。
假設(shè)在固定坐標(biāo)系中,船舶的位置坐標(biāo)為(x,y)。由圖1可知,船舶在Serret-Frenet坐標(biāo)系中的坐標(biāo)為
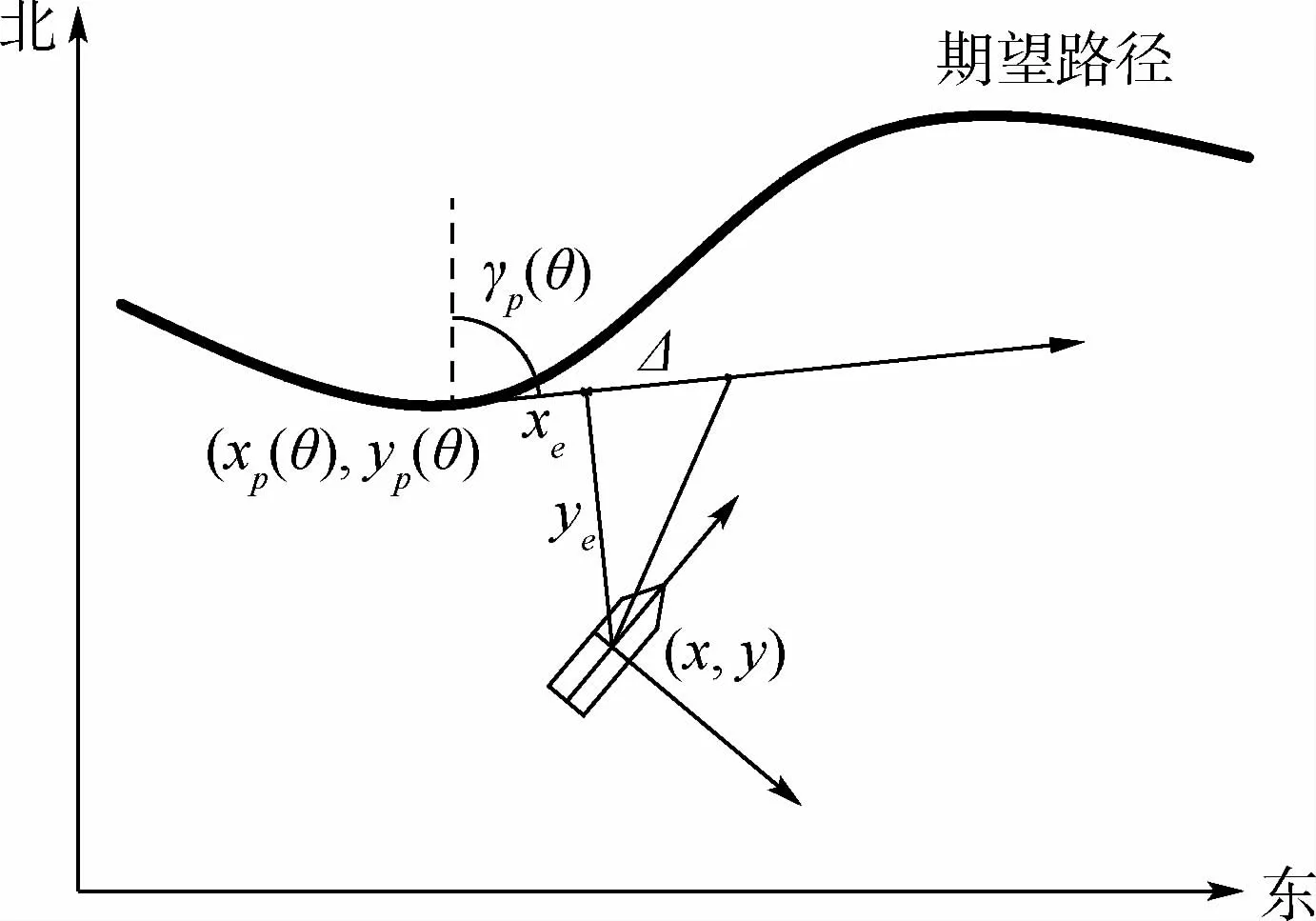
圖1 LOS引導(dǎo)律原理Fig.1 Geometrical illustration of LOS guidance law
式中:xe為縱向偏差;ye為橫向偏差。
旋轉(zhuǎn)角γp定義如下:

式中:x′p(θ)=?xp/?θ;y′p(θ)=?yp/?θ。
假設(shè)1 通常在直線或者直線圓弧循跡時(shí),xe并不影響引導(dǎo)律的引導(dǎo)效果,為了簡(jiǎn)化計(jì)算,故假設(shè)xe=0。

假設(shè)3 船舶的實(shí)際艏向角可以準(zhǔn)確跟蹤期望艏向角,即ψ=ψd。
由式(5)和假設(shè)1可得

由式(1)可知船舶的運(yùn)動(dòng)學(xué)方程為

將式(9)代入式(8)得

注2 船舶在直線循跡或圓弧循跡時(shí),漂角為一定值。但對(duì)于直線圓弧組成路徑,漂角會(huì)發(fā)生緩慢的變化。因?yàn)槠堑膭?dòng)態(tài)特性變化慢于控制帶寬變化,所以可通過(guò)自適應(yīng)項(xiàng)估計(jì)漂角。
將式(10)展開(kāi),并結(jié)合假設(shè)2可得

2 有限時(shí)間引導(dǎo)律
本文提出的有限時(shí)間引導(dǎo)律定義如下:


其中:參數(shù)k1>0,k2>0,參數(shù)0<α<1。
考慮到系統(tǒng)漂角β未知,建立如下誤差跟蹤系統(tǒng):

定理1 對(duì)于系統(tǒng)(13),在滿足假設(shè)3的前提下,設(shè)計(jì)的引導(dǎo)律(12)可以使系統(tǒng)(13)有限時(shí)間穩(wěn)定,即

式中:ε1和ε2為大于零的極小常數(shù)。
證明 將式(12)代入式(11)中可得

由于

將式(15)和式(16)代入式(14)得

定義李雅普諾夫函數(shù)如下:

式(18)對(duì)時(shí)間求導(dǎo)并將式(17)代入可得
令
則式(19)可以改寫為
由文獻(xiàn)[18]可知,存在參數(shù)0<θ0<1,滿足:

得到

通過(guò)引理1可知,系統(tǒng)(13)是有限時(shí)間穩(wěn)定的,并且收斂時(shí)間T1滿足:
證畢
3 仿真實(shí)驗(yàn)
3.1 仿真條件
為了驗(yàn)證本文所提出的有限時(shí)間引導(dǎo)律的有效性,以武漢理工大學(xué)一艘欠驅(qū)智能船舶為模型進(jìn)行了直線循跡仿真實(shí)驗(yàn)和曲線循跡仿真實(shí)驗(yàn),并與文獻(xiàn)[7]中的ILOS引導(dǎo)律進(jìn)行對(duì)比分析,采用PID控制算法進(jìn)行縱向和艏向控制器設(shè)計(jì)。
3.2 仿真結(jié)果與分析
1)直線循跡仿真
仿真條件設(shè)置如表1所示,引導(dǎo)律參數(shù)k1=1,α=0.8,k2=0.008。其他仿真條件如表1所示。
直線循跡的期望路徑為連接表1中2個(gè)路徑點(diǎn)的直線。圖2為直線循跡航行路徑曲線,圖3為直線循跡橫向偏差曲線。圖2表示2種方法均能引導(dǎo)船舶沿期望路徑航行。但是從圖3中可以看出,本文引導(dǎo)律可以使ye更快地收斂至零且沒(méi)有超調(diào),大約在t=110 s時(shí)收斂至零;傳統(tǒng)ILOS引導(dǎo)律的ye收斂速度較慢,大約在t=150 s時(shí)收斂至零。由此可知,本文引導(dǎo)律相比傳統(tǒng)ILOS引導(dǎo)律在直線循跡時(shí),ye的收斂速度更快,具有更好的引導(dǎo)效果。圖4為比例系數(shù)kp隨時(shí)間變化曲線。圖5表示2種方法的實(shí)際艏向角都可以較好地跟蹤期望值。

圖3 直線循跡橫向偏差曲線Fig.3 Curves of straight-line path following cross-track error
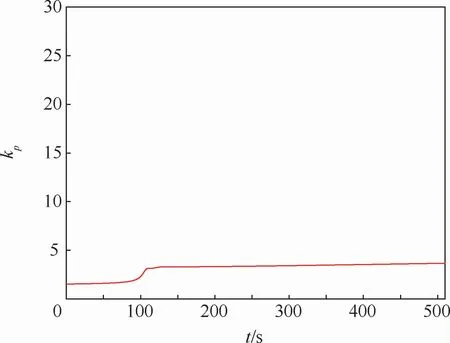
圖4 直線循跡引導(dǎo)律比例系數(shù)變化曲線Fig.4 Curve of straight-line path following guidance law proportional coefficient
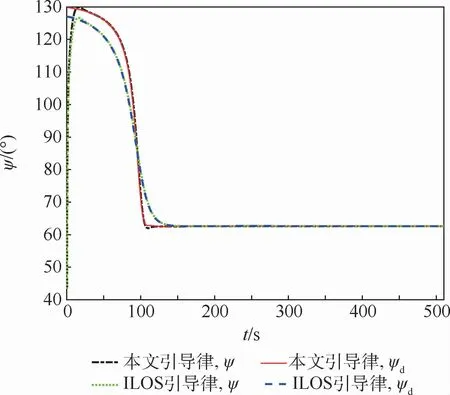
圖5 直線循跡艏向角變化曲線Fig.5 Curves of straight-line path following heading angle

表1 直線循跡仿真條件Table 1 Simulation conditions of str aight-line path following
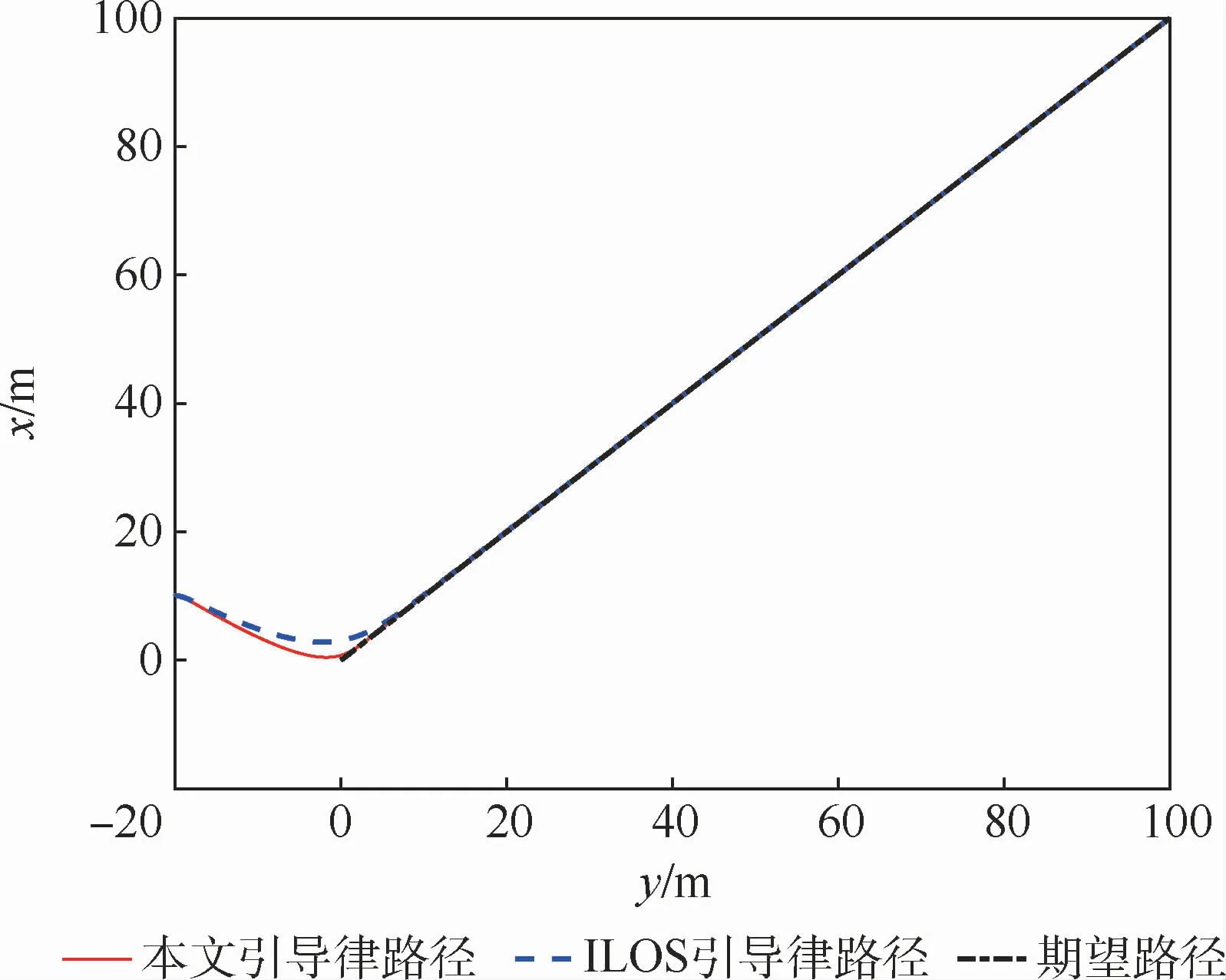
圖2 直線循跡曲線Fig.2 Curves of straight-line path following
2)曲線循跡仿真
仿真條件設(shè)置如表2所示,引導(dǎo)律參數(shù)k1=0.4,α=0.8,k2=1。其他仿真條件如表2所示。曲線循跡的期望路徑為連接表2中5個(gè)路徑點(diǎn)的直線圓弧曲線。圖6為曲線循跡航行路徑曲線,圖7為曲線循跡橫向偏差曲線。圖6表示2種方法均能引導(dǎo)船舶沿期望的曲線路徑航行,但本文引導(dǎo)律的路徑更接近期望路徑。為了進(jìn)一步比較2種方法引導(dǎo)效果的優(yōu)劣,從圖7中可以看出,本文引導(dǎo)律的ye收斂速度更快。在3處轉(zhuǎn)彎路徑處,ye由于曲率的增大而增大,本文引導(dǎo)律的ye的峰值分別為0.01 m、0.04 m和0.04 m,傳統(tǒng)ILOS引導(dǎo)律的ye的峰值分別為0.03 m、0.3 m和0.3 m;本文引導(dǎo)律的ye重新收斂至零所花費(fèi)的時(shí)間分別為148 s、127 s和127 s,傳統(tǒng)ILOS引導(dǎo)律的ye又重新收斂至零所花費(fèi)的時(shí)間分別為148 s、241 s和241 s。圖8為比例系數(shù)kp隨時(shí)間變化曲線。
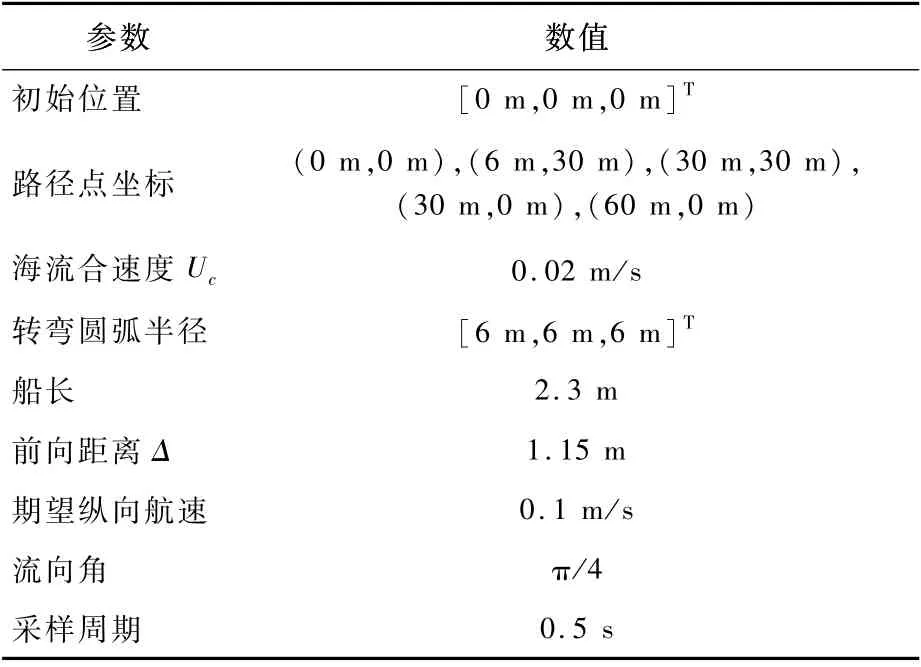
表2 曲線循跡仿真條件Table 2 Simulation conditions of curved-line path following

圖6 曲線循跡曲線Fig.6 Curves of curved-line path following
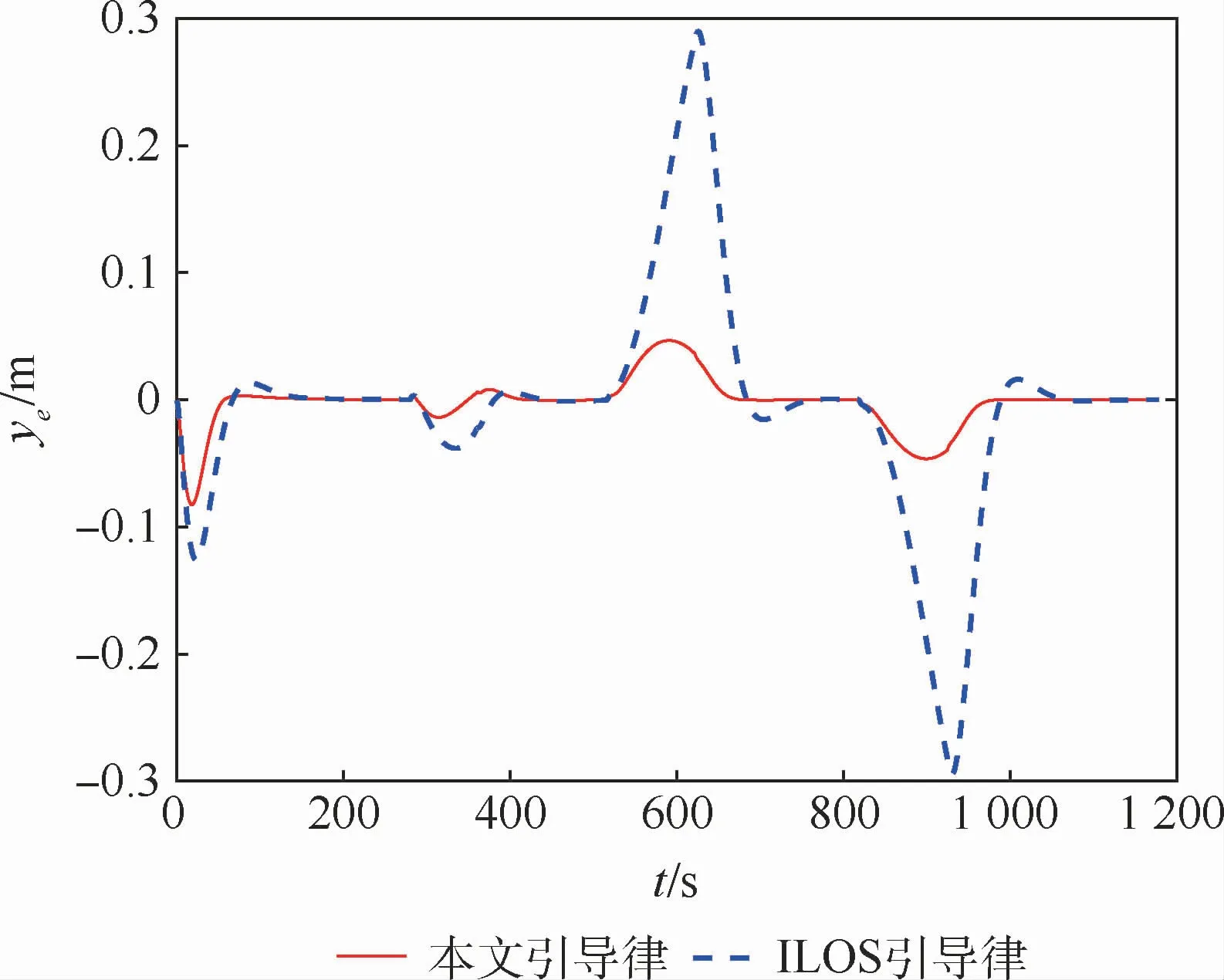
圖7 曲線循跡橫向偏差曲線Fig.7 Curves of curved-line path following cross-track error
結(jié)合圖3和圖4、圖7和圖8分析可知,比例系數(shù)隨橫向偏差的變化關(guān)系有大誤差、小增益和小誤差、大增益的特點(diǎn)。由圖7和圖8可知,當(dāng)橫向偏差穩(wěn)定于零附近時(shí),比例系數(shù)有較大的變化(如圖中的80~280 s,448~515 s,697~816 s,997~1 175 s),原因是:橫向偏差此時(shí)是一個(gè)逐漸趨近零的極小值,而比例系數(shù)對(duì)趨近零的極小值變化非常敏感,因此比例系數(shù)在此過(guò)程中變化較大。但由于橫向偏差是極小值,當(dāng)橫向偏差趨于零時(shí),比例系數(shù)的變化并不會(huì)影響引導(dǎo)效果。
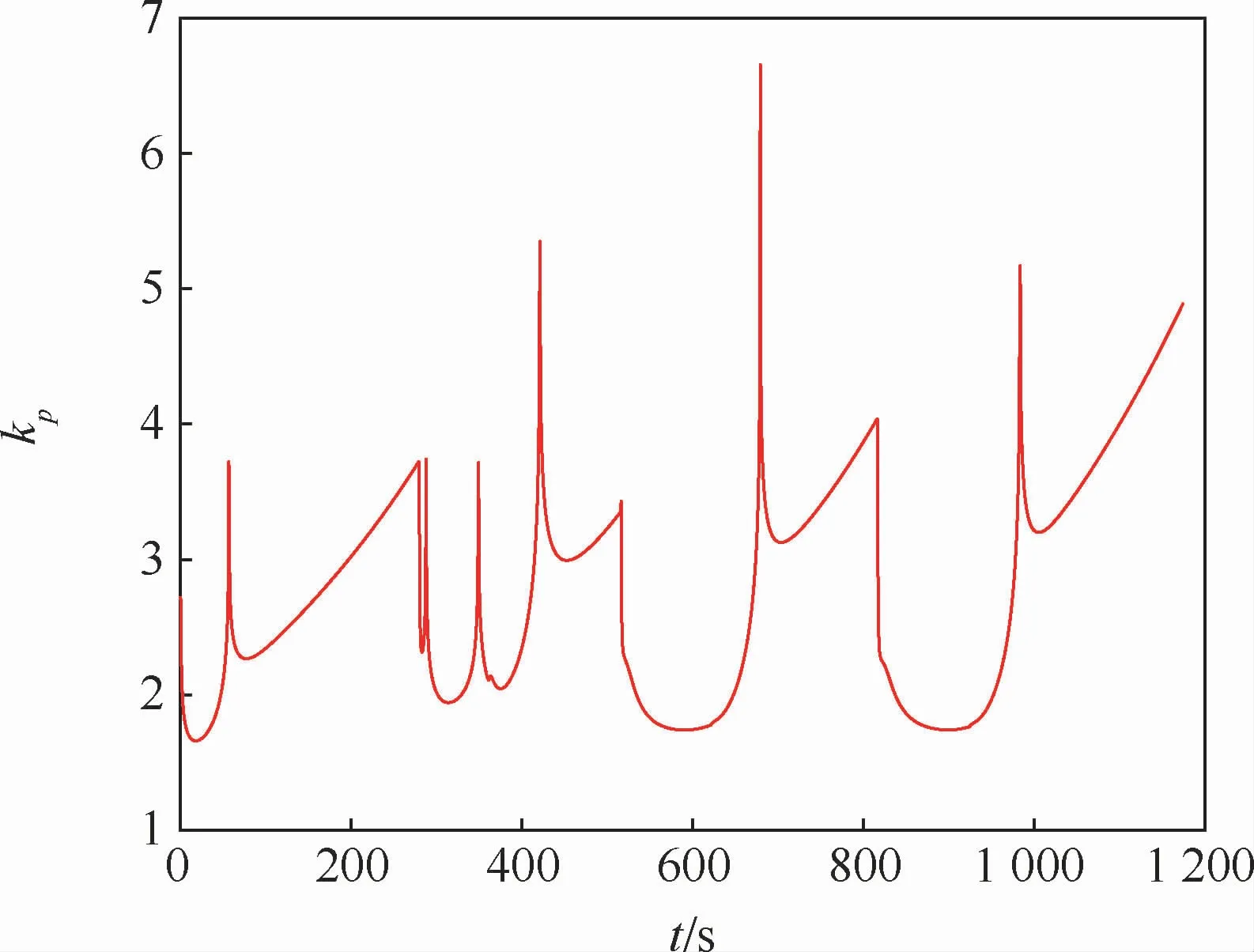
圖8 曲線循跡引導(dǎo)律比例系數(shù)變化曲線Fig.8 Curve of curved-line path following guidance law proportional coefficient
圖9表示曲線循跡情況下,2種方法的實(shí)際艏向角也都可以較好地跟蹤期望值。從圖5和圖9的艏向角對(duì)比曲線可以看出,在相同PID控制參數(shù)控制下,2種方法的艏向角跟蹤效果都較好,但2種方法計(jì)算的期望艏向角不同,證明本文引導(dǎo)律計(jì)算的期望艏向角相比傳統(tǒng)ILOS引導(dǎo)律更加合理和有效。
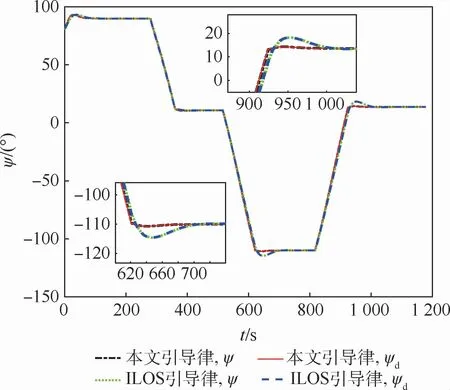
圖9 曲線循跡艏向角變化曲線Fig.9 Curves of curved-line path following heading angle
4 結(jié) 論
經(jīng)過(guò)理論分析和仿真對(duì)比實(shí)驗(yàn),得到以下結(jié)論:
1)所提出的有限時(shí)間引導(dǎo)律適用于直線循跡和曲線循跡,設(shè)計(jì)的自適應(yīng)項(xiàng)可以補(bǔ)償環(huán)境干擾和路徑曲率對(duì)循跡效果的影響。
2)基于有限時(shí)間穩(wěn)定理論證明了漂角未知時(shí),橫向偏差控制系統(tǒng)在應(yīng)用所提出的有限時(shí)間引導(dǎo)律時(shí)是有限時(shí)間穩(wěn)定的。
3)通過(guò)直線循跡和曲線循跡仿真對(duì)比實(shí)驗(yàn)結(jié)果可知,相比于傳統(tǒng)ILOS引導(dǎo)律,本文所提出的有限時(shí)間引導(dǎo)律可以使橫向偏差更快收斂至零附近且超調(diào)量更小。
綜上所述,對(duì)于欠驅(qū)智能船舶循跡控制,提出的有限時(shí)間引導(dǎo)律具有更大的應(yīng)用潛力。本文未涉及控制器研究,但船舶運(yùn)動(dòng)受模型不確定和時(shí)變外部環(huán)境干擾的影響,將導(dǎo)致動(dòng)力學(xué)控制性能變差,因此,下一步將研究模型不確定和時(shí)變外部環(huán)境干擾情況下欠驅(qū)智能船舶循跡控制器設(shè)計(jì)問(wèn)題。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:08:26
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
機(jī)械工業(yè)標(biāo)準(zhǔn)化與質(zhì)量(2022年6期)2022-08-12 02:07:42
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國(guó)船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30