變質心固定翼無人機動力學分析與抗擾控制
2022-03-29 07:55:30邱瀟頎高長生荊武興
北京航空航天大學學報 2022年3期
關鍵詞:設計
邱瀟頎,高長生,荊武興
(哈爾濱工業大學 航天學院,哈爾濱 150001)
變質心控制通過安裝在飛行器內部的質量滑塊來控制其飛行狀態。對于固定翼無人機來說,變質心方案相對于傳統的氣動舵面方案,具有維持無人機氣動外形、提高氣動效率、簡化機翼結構、提高隱身性能等諸多優點[1]。近年來,變質心控制技術已廣泛應用于衛星[2-5]、水下航行器[6-9]、高超聲速飛行器[10-14]、火星再入[15]和臨近空間飛艇[16]等多個領域。
當前,對變質心無人機的研究可分為旋翼機和固定翼兩大類。Haus等[17]著眼于控制效率,提出了一種通過質量滑塊控制四旋翼飛行姿態的方案,將2個滑塊分別安裝在4個螺旋槳臂上,從而可以控制四旋翼的傾側和俯仰運動,并通過合理設計的原型機[18],驗證了該方案的可行性。與螺旋槳控制相比,變質心方案具備更快的響應速度且更為節省能量,但該方案所能提供的最大控制力矩很大程度上取決于滑塊的質量和行程大小。對于變質心固定翼無人機,Erturk等[19-22]做了較為系統的研究,沿無人機縱向和橫向分別放置滑塊,以提供操縱無人機所需的俯仰和滾轉力矩,通過分析采用該布局的變質心固定翼無人機在平飛、零側滑角轉彎等不同工況下的特性,指出變質心方案在不增加無人機質量的同時,消除了傳統舵面方案中由于氣動舵偏轉所引起的氣動阻力,有效降低了無人機的燃油消耗。此外,Erturk等還考慮了螺旋槳扭矩對變質心固定翼無人機的影響[23-24],并開展了簡單的飛行試驗以驗證方案可行性[25]。當前,多數變質心固定翼無人機采用將滑塊安裝在機翼中段的雙滑塊方案,而機翼中段狹窄的空間勢必會給滑塊的安裝帶來挑戰;此外,控制器多由簡單的線性化方法設計[26]。顯然,對于具有強非線性、強耦合特點的變質心固定翼無人機,基于線性化方法所設計的控制器在實際工作中將面臨巨大挑戰,甚至有失效的風險。
本文圍繞新型變質心方案和具有強魯棒性的姿態控制器設計2個問題展開研究,提出了一種通過質量滑塊控制無人機橫向運動的新型單滑塊方案,從而實現對副翼的替代。相對于雙滑塊方案[25],該方案時滯更小、結構更加簡單,且滑塊的安裝空間相對充裕。通過對該無人機進行動態特性及動力學耦合特性分析,為滑塊參數的設計提供了量化參考,給出了滑塊在機身上的理想安裝位置。基于粒子群算法(particle swarm optimization algorithm,PSO)設計了單滑塊變質心固定翼無人機的自抗擾控制器(active disturbance rejection control,ADRC),仿真結果驗證了該控制器具備較強的魯棒性和抗干擾能力。
1 運動模型及動力學特性
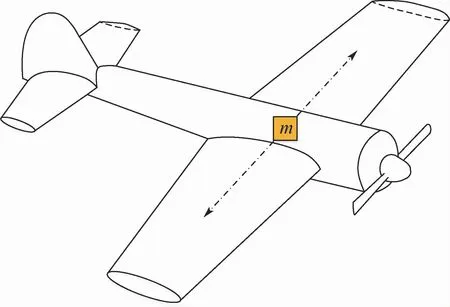
圖1 變質心固定翼無人機簡圖Fig.1 Sketch of mass-actuated fixed-wing UAV
假設圖2所示文獻[25]中的2種雙滑塊方案與本文的單滑塊方案具有相同的質量比,則有μL=μR=μ1/2,μL和μR分別為雙滑塊方案中的左右滑塊質量比。本文提出的單滑塊方案相對以上2種雙滑塊方案,具備如下優勢:

圖2 文獻[25]中的雙滑塊方案Fig.2 Dual-slider scheme in Ref.[25]
1)相對于方案1,時滯更小。對于方案1來說,每次只能操縱一側的滑塊,若想提供與本文單滑塊方案相同的滾轉力矩,其滑塊的移動距離則應為單滑塊方案的2倍。而當滑塊移動速度相同的情況下,必然會導致方案1需要更多的時間才能提供所需俯仰力矩,即方案1的時滯更大。
2)相對于方案2,結構更加簡單。
3)滑塊的安裝空間相對充裕。由于方案1和方案2兩種雙滑塊方案均將滑塊放置于機翼中部,這對本來空間就十分狹小的機翼來說頗具挑戰。而本文所提出的單滑塊方案,將滑塊的移動范圍限制在空間相對充裕的機身內和機翼根部,這在一定程度上緩解了滑塊安裝時的空間約束問題。
1.1 變質心無人機運動模型
根據牛頓運動定律和動量矩定理,推導出本文研究對象的運動學模型和動力學模型。運動學方程為

式中:u、v、w和p、q、r分別為無人機質心平動速度和繞質心轉動角速度在機體坐標系三軸的分量;pn、pe、pd為無人機在地面坐標系下的位置;φ、θ和ψ分別為滾轉角、俯仰角和偏航角。
而變質心無人機的動力學模型為


1.2 動力學特性分析

1.2.1 縱向運動
可以得到變質心無人機縱向運動線性化方程為

式中:Xlon=[u w q θ]T為狀態;Alon和Blon分別為狀態矩陣和控制矩陣;ulon=[δeδt]T為控制量,δe和δt分別為升降舵偏轉角和油門大小。
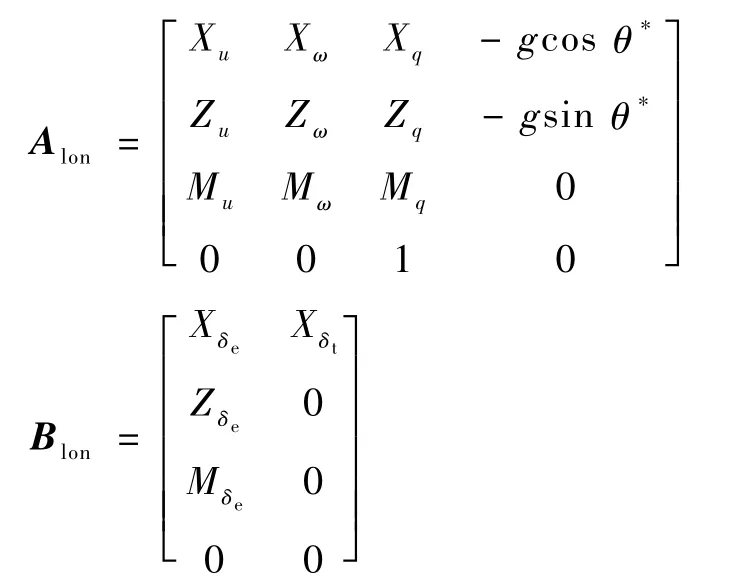
式中:矩陣Alon和Blon中各參數的具體含義見文獻[27],θ*為平衡狀態下的俯仰角。

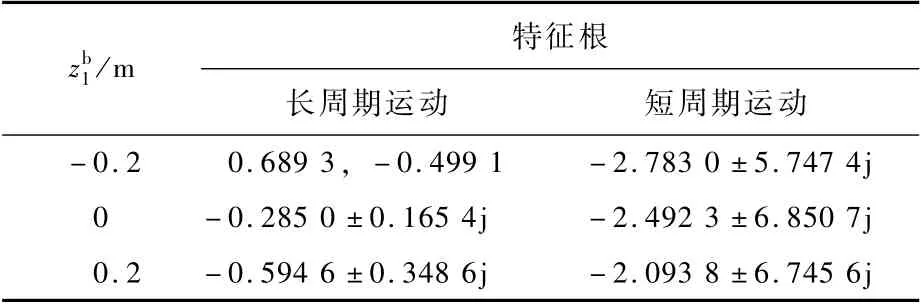
表1 縱向運動特征根Table 1 Eigenvalues of longitudinal motion

圖3 縱向動態特性區域分布Fig.3 Area distribution of longitudinal dynamic characteristics

式(4)給出了變質心無人機的俯仰力矩:

式中:G為系統重力;ρ為大氣密度;Sref為參考面積;c為平均氣動弦長;α為迎角;C·為各氣動系數。

1.2.2 橫向運動
類似地,變質心無人機橫向運動的線性化方程為


其中:矩陣Alat和Blat中各參數見文獻[27],φ*為平衡狀態下的滾轉角。
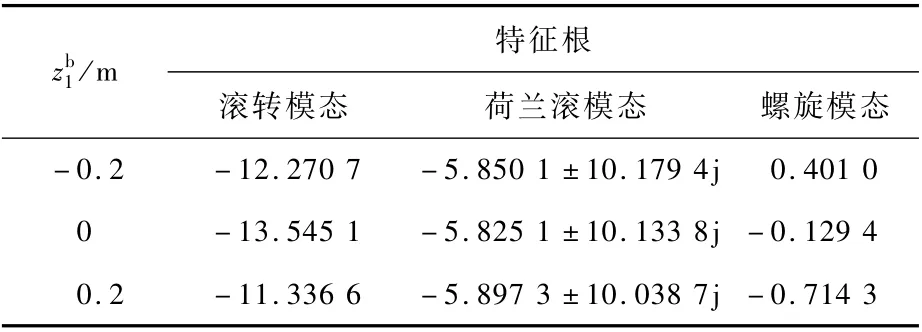
表2 橫向運動特征根Table 2 Eigenvalues of lateral motion

式中:k·為與發動機性能有關的常數;b為翼展;β為側滑角。
1.3 控制效率分析


圖4給出了質量比一定時,滑塊效率系數隨無人機飛行速度的變化曲線。可以看出,其數值隨著無人機飛行速度的增大而逐漸降低,且變化速度趨緩。因此,本文所提出的單滑塊變質心方案適合于飛行速度普遍較低的小型固定翼無人機,可以實現對其姿態的高效控制。

圖4 效率系數隨速度變化曲線Fig.4 Efficiency coefficient versus airspeed
2 自抗擾控制器設計
針對變質心無人機動力學強耦合、強非線性特點,以及在飛行中面臨的參數攝動和外部擾動等復雜因素,本節將設計變質心無人機自抗擾控制器。
2.1 仿射形式控制模型
令φ=[φ,θ,ψ]T、ω=[p,q,r]T,基于第1節所建立的變質心無人機運動方程,可得

式中:ζ為未知擾動;J為慣性張量;M為力矩矢量。

式中:


式中:dφ為總擾動,且


2.2 控制器設計
基于式(11)所示的變質心無人機仿射形式非線性控制模型,結合自抗擾控制器基本原理[28],可設計如圖5所示的自抗擾控制器。

圖5 控制器結構Fig.5 Structure of controller
首先,可設計離散形式的跟蹤微分器為

式中:r0為速度因子;h為濾波因子;φc為指令值;fhan(·)為最速綜合控制函數[28]。
擴張狀態觀測器的離散形式為

式中:β01、β02、β03、r1、r2為可調參數,直接影響擴張狀態觀測器的估計精度;函數fal(·)定義為

自抗擾控制器的非線性狀態誤差反饋設計為

式中:c1、r3、h1為可調參數。
進一步動態補償線性化處理,可得控制量為

考慮到所設計的控制器具有多個可調參數,手動調節過程必然十分耗時。本文采用粒子群算法[29]對自抗擾控制器參數進行優化設計。根據經驗,跟蹤微分器的濾波因子可直接取值h=0.01,則待優化參數為r0,β01,β02,β03,r1,r2,c1,r3,h1共計9個。利用粒子群算法優化這9個參數時,為了在保證控制器準確性和快速性的同時,防止控制量的急劇變化,將粒子的適應度函數取值為


3 仿真分析
本節對第2節所設計的變質心無人機自抗擾控制器進行仿真,以驗證控制器的有效性、魯棒性和抗干擾能力。主要分析了以下3種工況:①工況1,理想工況,系統無參數攝動及外部擾動,并將此工況作為基本參照。②工況2,變質心無人機受到氣動參數、質量特性等內部參數攝動20%的影響,以此驗證控制器的魯棒性。③工況3,在此工況下,第6~7 s的時間區間內對系統施加一個1.5sin t形式的擾動,用來模擬陣風;在其余的時間內,對系統施加一個0.1sin(80πt)形式的高頻擾動,以此來驗證控制器的抗外部干擾能力。
變質心無人機的基本參數如表3所示。滑塊行程范圍為±0.2 m,最大滑動速度為0.7 m/s;升降舵偏轉角限制在±30°之間;方向舵偏轉角同樣限制在±30°之間;仿真特征點選取為Va=40 m/s的水平直線飛行狀態。經過粒子群算法優化后的控制器參數為h=0.01,r0=92.123,β01=198.77,β02=5 753,β03=33 188,r1=1.331,r2=1.262,c1=1.160,r3=2.435,h1=0.086。不同工況下的控制器仿真結果如圖6~圖9所示。

表3 無人機參數Table 3 Parameters of UAV
圖6和圖7分別給出了控制器對指令姿態角的跟蹤結果及其相應的控制信號曲線。可知,無論是面臨參數攝動還是外部擾動,經過粒子群算法優化后的自抗擾控制器,均能夠在滿足控制信號約束的條件下完成對指令信號的穩定跟蹤,且具備良好的動態特性及穩態精度,這充分說明了該控制器具備良好的魯棒性和抗干擾能力。

圖6 姿態角跟蹤結果Fig.6 Tracking results of attitude angles

圖7 控制信號曲線Fig.7 Control signal curves


圖8 擴張狀態觀測器估計誤差Fig.8 Estimation error of ESO

圖9 工況3下的擴張狀態觀測器性能Fig.9 Performance of ESO under Condition 3
4 結 論
本文以變質心固定翼無人機為對象展開研究,取得如下結論:
1)提出了一種時滯性更小、結構更加簡單、空間相對充裕的單滑塊變質心固定翼無人機布局方案。
2)基于所推導的變質心無人機運動模型,分析了滑塊參數對無人機動力學特性的影響,并給出了滑塊在機身上的理想安裝位置。
3)針對變質心固定翼無人機的強耦合、強非線性特點,本文設計了基于粒子群算法的自抗擾控制器。仿真表明,在面臨系統參數攝動和外部擾動等多種復雜工況下,該控制器均能夠有效完成對變質心固定翼無人機的控制任務,具備良好的魯棒性。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04