矩形大口徑激光光束質量評價光學系統設計
2022-03-29 11:31:10潘國濤閆鈺鋒白素平孫宏申
中國光學 2022年2期
潘國濤,閆鈺鋒 ,于 信,張 雷,孫 闊,白素平,孫宏申
(1.長春理工大學 光電工程學院,吉林 長春 130022;2.中國人民解放軍63867部隊,吉林 白城 137000;3.吉林江機特種工業有限公司八分廠,吉林 吉林 132021)
1 引 言
對于激光器而言,激光的亮度是最為重要的技術指標之一[1],而激光的亮度與功率成正比,與光束質量因子M2的2次方成反比[2],因此可以通過提高功率和改善光束質量的技術途徑提高激光的亮度。近年來,隨著增益介質[3]、冷卻技術[4]和諧振腔優化設計[5]的迅猛發展,固體板條激光器逐漸展現出其優越性,輸出功率從千瓦量級發展到兆瓦量級。然而,隨著功率的攀升,由于“熱效應”等因素的影響,光束質量逐漸退化,限制了激光器亮度的提升。得益于自適應光學校正技術的日益成熟,使得固體板條激光器具備兼顧高功率、高光束質量的潛力,并取得了相應的研究成果。2017年,YU X等人[6]采用約束條件下的低階像差自動校正技術,將出射光束波前 PV值從57.26 μm減小到了1.87 μm。2017年,中國科學院光電研究院報道的經混合式自適應光學凈化系統校正技術,使得單脈沖5 J, 200 Hz固體板條激光器實現了優于2倍衍射極限的光束質量[7]。2018年,楊平等人[8]采用AO系統輔以相應的低階像差校正技術,測得750 MW板條激光器的光束質量β因子為1.64×DL。
隨著板條固體激光器功率的提升,增益介質尺寸增加,導致輸出光束口徑逐漸增大,給自適應光學校正系統的設計增加了難度。對于自適應光學校正系統中的探測單元,難點在于如何在有限的尺寸限制范圍內,實現矩形大口徑光束多參數的檢測與評估,包括波前畸變的共軛探測、均勻性和光束質量等的綜合評估。
為解決上述問題,研究人員開展了一系列的研究工作。相里微[9]等采用無光焦度開普勒型望遠系統,實現了口徑為150 mm×150 mm方形光束的波前探測,系統縮束倍率為11倍,但筒長較長,達到了2.42 m。雖然,伽利略型的望遠系統結構有利于縮短筒長,但無法滿足自適應光學校正系統的共軛需求。張成棟[10]實現大功率光纖激光器的功率和光束質量測量,采用β因子完成對激光的單一參數光束質量的評價,測得功率為90.1 W時,β值為1.41;功率為3.04 kW時,β值為1.81。該系統雖可實現光束質量等的測量,但測量系統體積較大。張禹、楊忠明[11-12]等設計的450 mm大口徑多光譜通道波前測量系統,實現可見光、近紅外和中紅外多波段的單一參數波前的測量,同時由于口徑過大,使測量系統體積過大。
目前的技術方案雖然可以較好地實現大口徑矩形光束的波前、光束質量的檢測。但在以下兩個方面的工作還稍有欠缺:(1)如何在尺寸限定的條件下,滿足自適應光學校正系統共軛探測的需求;(2)如何在滿足自適應光學校正系統波前共軛探測需求的前提下,兼顧校正結果的評估,如光束質量、光斑均勻性等。本文圍繞上述兩個問題開展了相關工作。
首先,根據探測口徑大、共軛成像以及多參數檢測的技術要求,基于開普勒望遠系統的成像原理,確定采用大倍率光束壓縮后分光探測的方案,實現了多參數檢測。其次,針對大倍率、筒長限制以及長出瞳距的問題,主縮束系統利用雙高斯初始結構的消像差特點,并結合非球面技術保證成像質量,基于攝遠成像的原理壓縮筒長,優化出瞳距。再次,根據系統對波前探測系統、光束質量探測子系統和光束均勻性探測子系統的技術指標要求,分別建立了探測系統的仿真模型,分析探測系統的成像質量,并對探測系統進行公差分析,為實驗平臺的搭建提供依據。最后,搭建相關實驗,驗證設計結果。
2 光學系統技術指標
系統總體設計結構如圖1所示,包括主縮束系統、波前探測子系統、光束質量探測子系統和光束均勻性檢測子系統。波前探測子系統是在主縮束系統出瞳位置處安裝微透鏡陣列和波前傳感器,變形鏡(DM)與波前傳感器(H-S)滿足共軛需求,經變形鏡校正后的光束在波前傳感器像面上產生陣列光斑,通過陣列光斑分析波前。光束質量探測子系統配合主縮束系統完成對光束質量β因子的計算與分析。光束均勻性檢測子系統配合主縮束系統完成對光束均勻性的檢測。表1是激光光束質量評價系統的技術指標。

圖1 矩形大口徑激光光束質量評價系統示意圖Fig.1 Schematic diagram of evaluation system of the large rectangular aperture laser beam quality
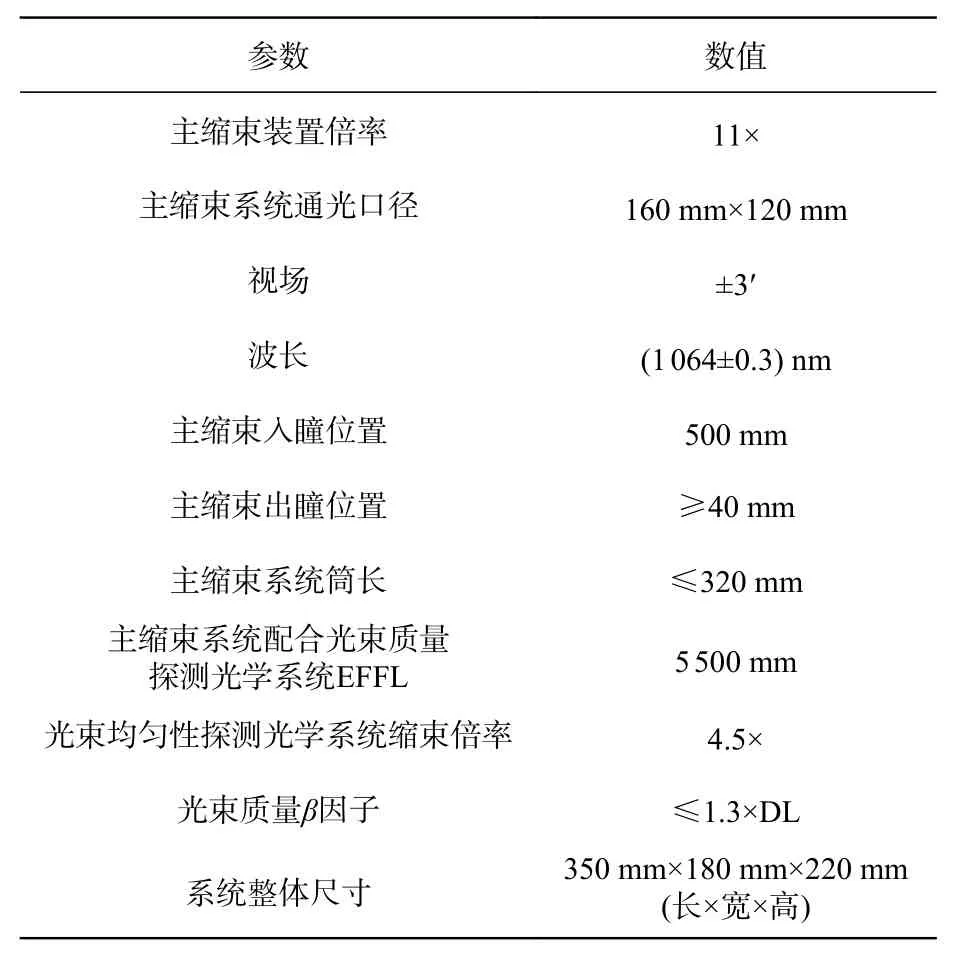
表1 激光光束質量評價系統的技術指標Tab.1 The technical specifications of the laser beam quality evaluation system
為了保證校正結果,必須保證波前探測子系統探測到的波前、變形鏡(DM)校正的波前是同一個物理量,這就要求波前探測器探測面和變形鏡(DM)共軛。為了保證物像共軛,檢測中變形鏡(DM)需放置在主縮束系統的入瞳位置處,因此,設計中要設定主縮束系統的入瞳位置,設定為500 mm。選擇500 mm的入瞳位置,主要是由于入射主激光的能量過高,需要進行多次分光,將大部分能量輸出發射,僅保留少部分進行探測。
同時,為滿足物像共軛和自適應光學校正系統對長出瞳距以及短筒長的要求,波前傳感器像面應穩定放置在主縮束系統的出瞳位置處。為保證壓縮光束分光后順利進入到后續系統中,光路需進行分光、折轉,并且受波前傳感器安裝位置的限制,要求出瞳位置不小于40 mm,以滿足光路折轉和安裝的需求。系統探測的視場(±3')對應著傾斜鏡的行程。
3 光學系統設計與分析
矩形口徑激光光束質量評價光學系統整體結構圖,如圖2所示。由主縮束系統、波前探測子系統、光束質量探測子系統和光束均勻性檢測子系統組成。

圖2 系統2D結構圖Fig.2 Schematic diagram of system (2D structure)
3.1 波前探測系統設計
波前探測系統由主縮束系統和波前傳感器組成。由于受探測器靶面尺寸限制,因此需要實現大倍率光束壓縮。縮束光學系統[13]是一個無光焦度望遠鏡系統[14],通光口徑為160 mm×120 mm,等效圓形口徑為200 mm。開普勒望遠系統和伽利略望遠系統都可以實現。與伽利略望遠系統相比,開普勒望遠系統具有物像共軛關系,滿足自適應校正的共軛需求,且實像點便于裝調,可以放置消雜光光闌,抑制雜散光。由于一方面需要滿足自適應校正的共軛需求,另一方面,主縮束系統需要在筒長≤320 mm的情況下,入瞳位于500 mm時,出瞳距≥40 mm,因此選用開普勒望遠系統,該系統由物鏡組和目鏡組構成,相關參數計算和望遠鏡的參數計算大致相同。
根據主縮束系統的結構參數,應用參考文獻[15]中開普勒望遠系統的視放大倍率公式、高斯公式和轉面公式,求解物鏡組和目鏡組焦距、。計算得。原理上,開普勒型望遠鏡的筒長等于物鏡組焦距加上目鏡組焦距,但此時筒長約為485.448 mm,大于筒長設計參數320 mm,將鏡組設計成攝遠系統的結構可進一步縮短筒長。
依據參考文獻[16]中定義的筒長系數k等于鏡筒長度與焦距的比,且0 <k< 1。結合參考文獻[15]中高斯光學公式,當攝遠系統采用兩片初始結構時,其結構參數有如下的關系:

3.1.1 主縮束光學系統優化設計
將理論計算對應的理想透鏡組替換成實際透鏡組,起初物鏡組和目鏡組各為兩片式,但系統的口徑較大,成像質量較差,未能滿足需求。因此,對物鏡組及目鏡組的結構做出改進。物鏡組和目鏡組分別采用4片式和3片式透鏡,并將物鏡組的第一片透鏡的前表面設計成非球面以減小大口徑透鏡的低階像差,明顯改善像差。目鏡組設計成攝遠結構以增大出瞳距,來滿足后續系統的光瞳銜接。運用Zemax軟件對光學系統反復優化,與加工樣本校對,預留機械結構安裝口徑余量,主縮束系統的光學結構示意圖如圖3所示。最終主縮束系統透鏡數據如表2所示。

圖3 主縮束系統的光學結構示意圖Fig.3 Schematic diagram of optical structure of main beam compression system

表2 主縮束系統透鏡數據Tab.2 Lens data of the main beam compression system
非球面4th Order term為-4.076×10-9;6th Order term為-4.056×10-15;8th Order term為8.633×10-20。此時主縮束系統的出瞳距離達到了41.405 mm,縮束倍率為11倍,筒長319.500 mm,滿足設計要求。考慮非球面的可加工性,非球面的子午曲率和弧矢曲率如圖4所示,兩條曲線均為平滑的曲線,且曲線斜率變化平緩,未出現拐點。因此該非球面具有良好的可加工性。

圖4 非球面子午曲率和弧矢曲率曲線圖Fig.4 Curves of tangential and sagittal curvature of aspheric surfaces
3.1.2 波前探測系統分析
進一步分析設計結果,對優化設計得到的系統進行像質評價,主縮束系統的像面上追跡光線點列圖如圖5(a)所示,光斑的RMS半徑優于4.3 μm;波前傳感器像面足跡圖如圖5(b)所示;給出0視場和半視場的波前圖,如圖5(c)(彩圖見期刊電子版)所示,PV值優于0.032 0λ,RMS值優于0.008 9λ。系統具有較好的成像質量。

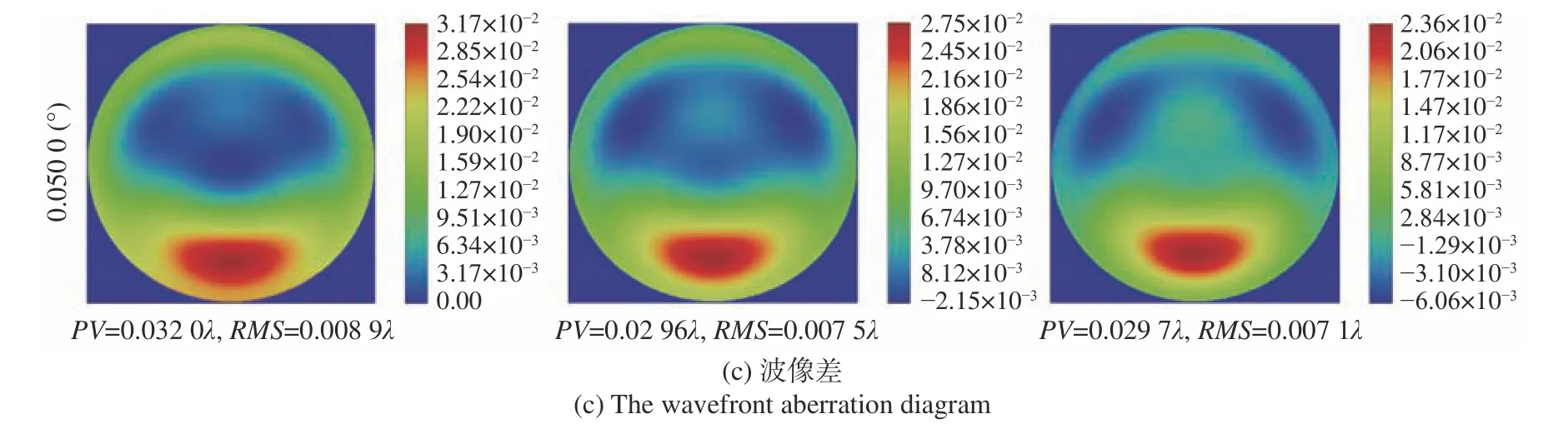
圖5 主縮束系統像質評價Fig.5 Image quality evaluation results of the main beam compression system
3.2 光束質量探測系統設計
3.2.1 光束質量探測子系統設計
由于變形鏡(DM)進行光束校正的微小調整傾角為±3',因此所設計的系統視場為±3'。考慮到探測相機靶面尺寸的限制,為滿足大多數探測相機靶面尺寸的需求,假設最小靶面尺寸為1/2英寸,應用參考文獻[15]中的無限遠像高公式計算系統的等效焦距約為5 500 mm。光束質量探測子系統的焦距fa=5 500/β=500 mm。
光束質量探測系統由主縮束光學系統和光束質量探測子系統組成,配合探測相機對光束的光束質量進行測量與評價,最終設計筒長為80.000 mm,光束質量探測子系統的透鏡數據如表3所示。給出0視場和半視場的波前圖,如圖6(彩圖見期刊電子版)所示。PV值優于0.008 3λ,RMS值優于0.001 5λ。2D圖如圖7所示。

表3 光束質量探測子系統透鏡數據Tab.3 Lens data of beam quality detection subsystem

圖6 光束質量探測子系統波像差Fig.6 Wavefront aberration of the beam quality detection subsystem
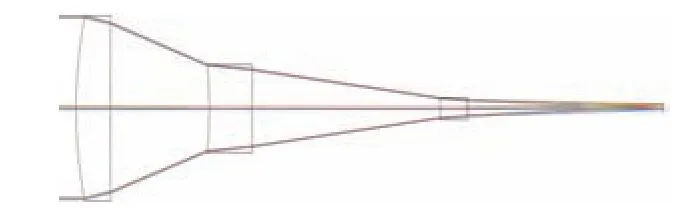
圖7 光束質量探測子系統2D圖Fig.7 2D diagram of the beam quality detection subsystem
3.2.2 光束質量探測系統分析
將主縮束系統和光束質量探測子系統按照光瞳銜接原則配合,并分析其像質。系統光路圖如圖8所示。
對光學系統進行像質分析,點列圖如圖9(a)所示,光斑的RMS半徑優于6.614 μm。MTF調制傳遞函數曲線如圖9(b)(彩圖見期刊電子版)所示,各視場MTF曲線接近衍射極限,0視場和半視場波像差如圖9(c)(彩圖見期刊電子版)所示,PV值優于0.073 7λ,滿足像質評價要求。過于嚴格會增加加工裝調的要求,導致成本提高,還可能使成像質量不穩定,公差過于寬松可能會使成像質量變得很差。總之,公差分配不合理會導致系統的性能缺陷,所以合理分配公差對于一個光學系統來說非常重要。

圖8 光束質量探測系統2D圖Fig.8 2D diagram of the beam quality detection system
對于一個設計完成的光學系統來說,公差情況如何是評價這個系統可行性的重要因素,公差

圖9 光束質量探測系統像質評價Fig.9 Evaluation results of the image quality of the beam quality detection system
根據元件加工標準,給定公差數據,光束質量探測系統公差數據如表4所示,1 000次蒙地卡羅統計分析結果分別如表5所示。
由公差分析結果可知:90%波像差優于1/4λ,98%波像差接近1/4λ,滿足波像差設計要求。

表4 光束質量探測系統的公差數據Tab.4 Tolerance data of beam quality detection system

表5 光束質量探測系統的1 000次蒙特卡羅分析結果Tab.5 1 000 Monte Carlo statistical analysis results of the beam quality detection system
3.3 光束均勻性探測系統設計
3.3.1 光束均勻性探測子系統設計
光束均勻性探測系統由主縮束光學系統和光束均勻性探測子系統組成,配合探測相機對光束的均勻性進行測量與評價,因此,既要求出瞳距大于零以滿足探測相機的光斑接收,又要使其與主縮束系統的光瞳銜接。由于探測相機靶面尺寸的限制,系統縮束倍率為4.5倍,采用開普勒望遠系統。初始采用3片式鏡組,但與主縮束系統配合后,像差疊加,像質降低嚴重。通過優化最終系統物鏡組采用2片式,目鏡組采用3片式。光學筒長為145.716 mm,出瞳距為32.198 mm,光束均勻性探測子系統的透鏡數據如表6所示。給出0視場和半視場的波前圖,如圖10(彩圖見期刊電子版)所示,PV值優于0.012 3λ,RMS值優于0.003 2λ。2D圖如圖11所示。

表6 光束均勻性探測子系統透鏡數據Tab.6 Lens data of the beam uniformity detection subsystem
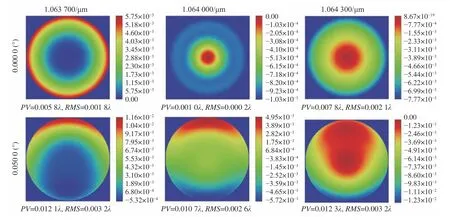
圖10 光束均勻性探測子系統波像差Fig.10 Wavefront aberration of the beam uniformity detection subsystem
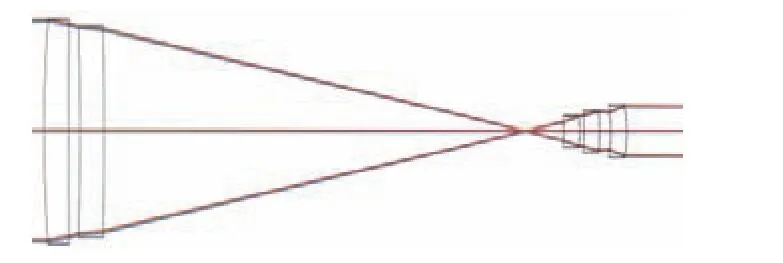
圖11 光束均勻性探測子系統2D圖Fig.11 2D diagram of beam uniformity detection subsystem
3.3.2 光束均勻性探測系統分析
將主縮束系統和光束均勻性探測子系統按照光瞳銜接原則組合,采用在光學系統的末端加上理想透鏡的方式,使光束匯聚于像面,再分析光學系統的成像質量。系統光路圖如圖12所示。

圖12 光束均勻性探測系統加入理想透鏡2D圖Fig.12 2D diagram of the beam uniformity detection system with an ideal lens
對組合后的光學系統做像質分析,點列圖如圖13(a)所示,光斑的RMS半徑優于4.414 μm。MTF調制傳遞函數曲線如圖13(b)(彩圖見期刊電子版)所示,各視場的函數曲線與衍射極限重合,波像差如圖13(c)(彩圖見期刊電子版)所示,PV值優于0.068 6λ,滿足像質評價要求。
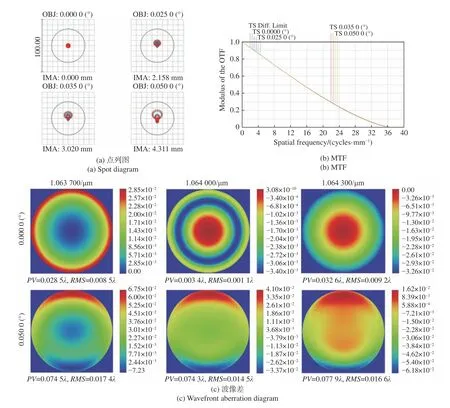
圖13 光束均勻性探測系統像質分析Fig.13 Evaluation of the image quality of the beam uniformity detection system
根據元件加工標準,光束均勻性探測系統公差數據如表7所示,1 000次蒙地卡羅統計分析結果如表8所示。
由公差分析結果可知,波像差優于1/4λ,滿足波像差設計要求。

表7 光束均勻性探測系統公差數據Tab.7 Tolerance data of the beam uniformity detection system
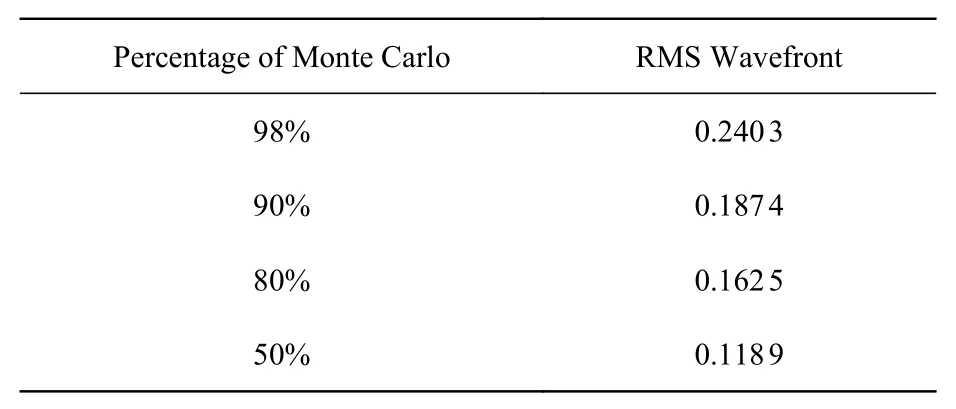
表8 光束均勻性探測系統1 000次蒙特卡羅分析結果Tab.8 1 000 Monte Carlo statistical analysis results of the beam uniformity detection system
4 測量實驗與結果
基于光學系統設計,搭建了矩形大口徑激光光束質量評價系統,在實現多參數測量的同時,有效地布局了安裝位置,使系統光機結構緊湊。如圖14(a)和14(b)所示,系統的整體尺寸為347.4 mm×148.5 mm×218.0 mm(長×寬×高),滿足技術指標要求。哈特曼傳感器相機測量光斑圖像如圖15所示,光束質量探測相機接收的圖像如圖16所示,光束均勻性探測相機接收的圖像如圖17所示。

圖14 矩形大口徑近紅外激光光束質量評價系統Fig.14 Beam quality evaluation system of the large rectangular aperture near-infrared laser
圖16的光束質量因子β優于1.24倍衍射極限。所涉及的光束質量β因子的計算應滿足式(2):

圖15 哈特曼傳感器光斑陣列圖像Fig.15 Spot array image of Hartmann sensor
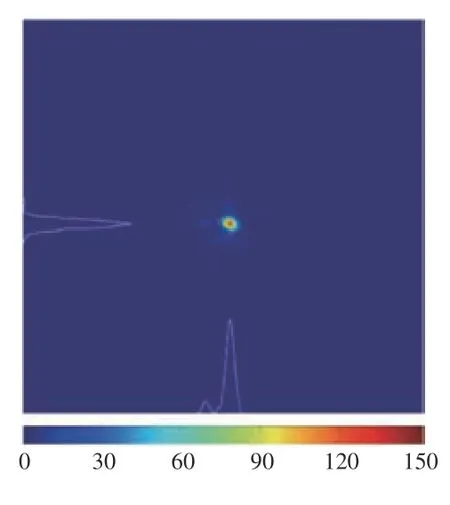
圖16 光束質量的探測圖像Fig.16 Detection image of the beam quality

圖17 光束均勻性的探測圖像Fig.17 Detection image of the beam uniformity
式中:A與ADL分別表示當桶中功率(PIB)=81.9%時,實際光束和理想光束對應的光斑面積[17],且對于長方形光斑。其面積ADL的求解如式(3)所示:

式中:Dx與Dy分別表示所測量近場光斑的寬度和高度[18]。
應用參考文獻[19]中的光斑光強計算公式計算圖17中光斑光強均勻度為73.8%。
5 結 論
針對在探測系統整體尺寸為350 mm×180 mm×220 mm(長×寬×高)的條件下,實現板條激光器輸出160 mm×120 mm矩形光束多參數的檢測問題。本文根據探測口徑、筒長限制等的技術要求,利用雙高斯的初始結構消像差特點,結合非球面技術,采用大倍率光束壓縮后分光探測的設計方案,并基于攝遠成像以及共軛成像原理,在滿足物像共軛、尺寸約束等條件下,實現對160 mm×120 mm矩形光束的共軛波前探測、光強均勻度檢測和光束質量評估。實驗中測得被測光束β因子為1.24倍衍射極限,光束均勻度為73.8%,滿足技術指標要求。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16