反無人機繩網捕獲系統的動力學建模與仿真*
2022-04-06 09:55:32陳青全豐志偉張國斌張青斌
國防科技大學學報 2022年2期
陳青全,豐志偉,張國斌,王 星,張青斌
(國防科技大學 空天科學學院, 湖南 長沙 410073)
無人機技術的發展使得其在生活、工作[1-7]中發揮著愈發重要的作用,無人機具有的體積小、飛行空域低和雷達難以探測等特性[8],使得其可能被不法分子利用從而造成各種破壞,如非法進入敏感空域、販毒、走私等,給社會穩定帶來重大安全隱患,因此反無人機技術成為近幾年來世界各國關注的熱點研究領域之一[9-12]。
繩網捕獲作為一種新興的反無人機模式,其具有的高容差、低要求和低成本等特性,使其迅速得到發展。按照發射位置的不同分類,反無人機繩網捕獲模式分為地面發射捕獲和空中發射捕獲。地面捕獲為地面瞄準和發射,例如英國OpenWorks公司研發出的肩扛式發射器SkyWall。空中捕獲是利用裝載有繩網的無人機在空中瞄準和發射,捕獲目標無人機并運送至指定區域,例如美國密歇根理工大學研制的無人機捕獲系統。
盡管各組織研究了各類反無人機繩網捕獲武器,但從公開文獻上看,對無人機的攔截過程以及攔截之后的回收著陸過程尚無深入和全面的動力學建模,也無較為完整的全過程仿真分析。事實上,國內外對柔性繩網的應用及理論分析主要集中在空間清除太空垃圾方面。如歐空局名為ROGER的地球靜止軌道廢棄衛星繩網抓捕項目[13-16];美國NASA名為GRASP[17-18]的繩網捕獲項目等。動力學研究方面,G?rdsback等[19]建立了空間飛網旋轉展開模型,利用商業軟件進行了仿真模擬;Hobbs[20]研究了繩索的彈性和疲勞斷裂,初步分析了繩索的自接觸機理;于洋等[21-23]利用商業軟件分析了空間柔性繩網的展開;張青斌等[24-29]研制了地面試驗樣機,進行了繩網地面試驗,并基于離散化模型,研究了空間繩網展開過程的動力學特性,進行了天地差異性分析。
相比于空間碎片捕獲任務,地面反無人機繩網捕獲任務最大的不同就在于繩網受到不可忽視的重力和空氣作用力。在上述力的作用下,繩網的網形變化與在空間環境中的相差甚遠。前期的試驗和仿真研究表明,重力和空氣作用力可能使得繩網不能完全展開,或者提前收攏,導致反無人機抓捕任務失敗。因此,有必要進行反無人機繩網捕獲任務的全過程動力學分析,并以此指導實際任務。
本文在項目組前期空間繩網和降落傘的研究基礎上,結合“低、慢、小”無人機的任務特征,闡述了平臺發射、繩網展開以及目標捕獲后降落傘回收的無人機捕獲過程;建立了捕獲平臺的六自由度剛體動力學模型;基于離散化的策略,采用繩索有限段的半阻尼彈簧模型分析了繩網展開過程的位置和形狀變化特性;采用九自由度物-傘多體動力學模型分析了繩網捕獲目標后的墜落過程。然后以某網捕系統為例,進行了全過程的仿真分析,并利用部分飛行試驗數據驗證校核了模型,研究反無人機繩網捕獲過程的特性。
1 無人機捕獲過程描述
圖1給出了繩網捕獲無人機的三個大體階段:①通過火箭或其他形式動力以一定初速度v0和角度α0發射總質量為m0的捕獲平臺;②當平臺飛行至目標空域時,二次發射繩網抓捕目標;③展開降落傘,完成目標無人機的捕獲回收。
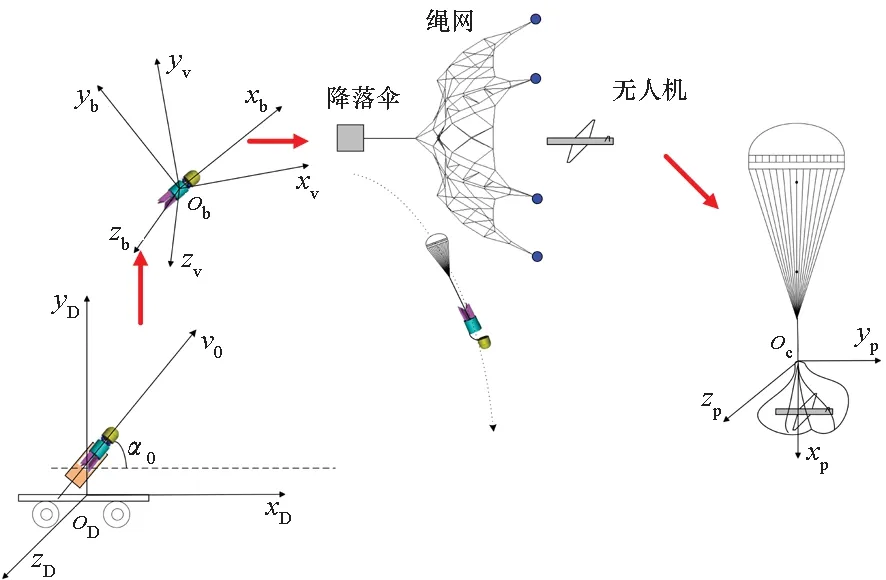
圖1 無人機捕獲過程示意Fig.1 Schematic diagram of the capture process of the UAV
2 動力學建模
分別對捕獲平臺飛行、繩網展開捕獲和降落傘回收進行動力學建模。
2.1 捕獲平臺飛行動力學建模
采用六自由度剛體模型建立捕獲平臺的軌跡動力學模型,如圖1所示。以地面發射點為原點oD建立右手直角坐標系oD-xDyDzD,其中oDxD軸方向為發射時刻平行于地面且指向目標無人機的方向,oDyD軸垂直大地豎直向上;以捕獲平臺質心為原點ob建立右手直角坐標系ob-xbybzb,obxb軸沿捕獲平臺縱軸指向頭部,obyb軸在平臺縱向對稱面內垂直于obxb軸向上;以ob為原點建立右手直角坐標系ob-xvyvzv,obxv軸為沿平臺速度方向,obyv軸豎直向上。
捕獲平臺在飛行過程中,受到重力、氣動力和推力作用。不考慮有推力情況,則在不考慮地球自轉的情況下,捕獲平臺質心的動力學方程為
(1)

在ob-xbybzb中建立其繞質心轉動的動力學方程為
(2)
其中:ωx、ωy和ωz為捕獲平臺的角速度,Ix、Iy和Iz為轉動慣量,Mq.xt、Mq.yt和Mq.zt為ob-xbybzb中的氣動力矩分量。聯立式(1)和式(2)即可求解平臺的運動特性。
2.2 繩網發射展開動力學建模
采用質量塊牽引的方式展開繩網,裝置如圖2所示。發射時拋掉前罩,質量塊以發射速度vnet和角度βnet牽引展開繩網。
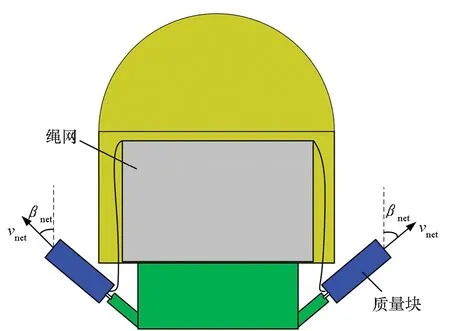
圖2 繩網發射裝置示意Fig.2 Schematic diagram of the tethered-net launching device
在柔性繩網多體動力學模型的基礎之上,考慮重力和空氣阻力的影響,建立低空條件下繩網展開過程的動力學模型[26-29]。如圖3所示,采用離散化的建模思路,將繩網劃分為若干繩段,各繩段可受拉不可受壓,質量集中于兩端點。
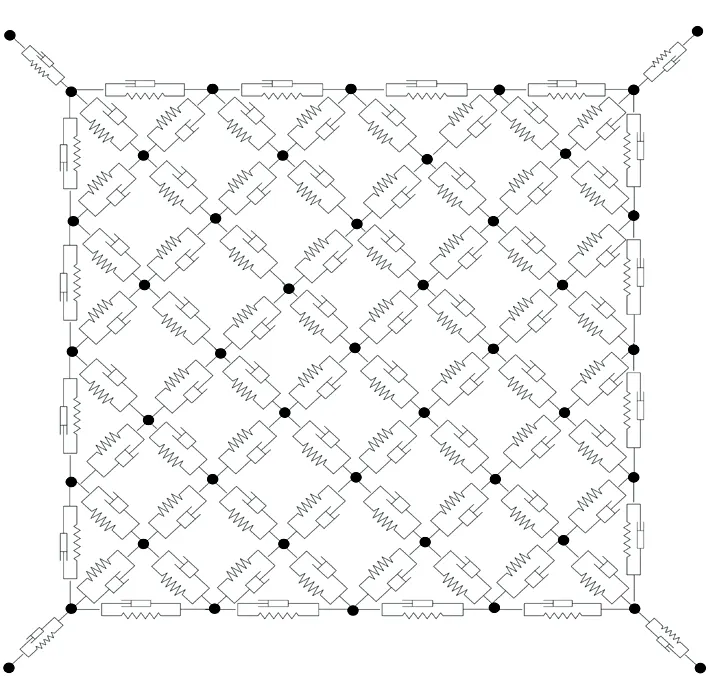
圖3 繩網的“半彈簧阻尼”模型Fig.3 Semi-spring damper model of the tethered-net
繩段單元sij的內力方向沿著單元徑向,大小近似為線彈性與線性阻尼之和,即
(3)


(4)
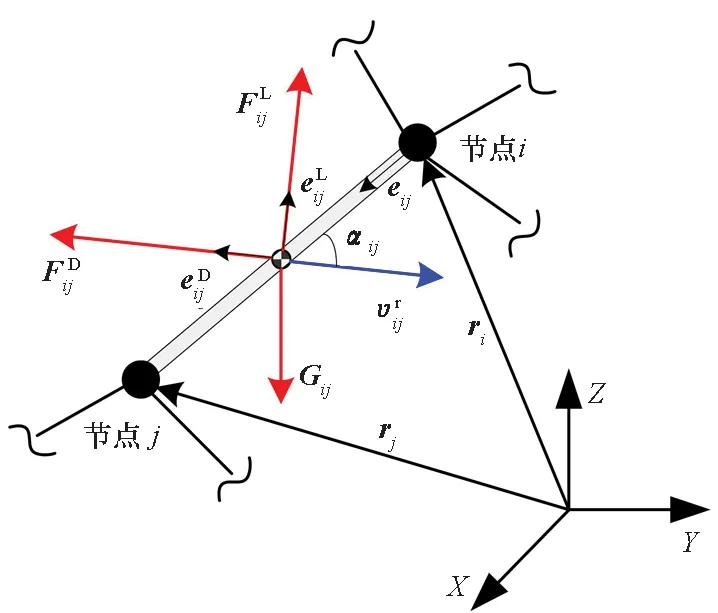
圖4 繩段sij所受外力Fig.4 External force acting on the segment sij
考慮繩索的透氣性,采用Paul Williams[28]經驗公式得到阻力系數CD和升力系數CL分別為
CD≈0.022+1.1sin3αn
(5)
CL≈1.1sin2αncosαn
(6)
其中,αn為繩段的攻角,其余弦cosαn可以表示為
(7)
(8)
(9)
其中,ρair為空氣密度,d為繩子的直徑,eD和eL分別為空氣阻力和空氣升力的單位方向向量。
(10)
(11)
根據牛頓第二定律,節點i的動力學方程可以表示為
(12)

(13)
(14)
(15)
(16)
其中,R(i)為與節點i存在連接關系的節點集合。
初始時刻繩網折疊封貯于網艙內,但是由于相關的彈射展開過程十分復雜,需另行詳細論述。結合前期試驗與仿真結果,為簡單起見,假定繩網初始狀態為原繩網的等比例縮小版,且不考慮網艙對繩網的作用。
2.3 捕獲后的無人機-降落傘動力學模型
繩網抓捕目標無人機后,降落傘拉出回收。為了簡化問題,忽略繩網碰撞過程和降落傘充氣過程。
參考文獻[29-30],本節建立如圖5所示的九自由度多體動力學模型,其中oc為物-傘鉸接點。以oc為原點建立固連的右手直角坐標系oc-xpypzp和oc-xtytzt,ocxp軸沿降落傘對稱軸向下,ocxt軸定義為降落傘展開時刻網和無人機組合體過oc豎直向下的體軸。參考文獻[31-32],得到物-傘九自由度力學方程為
(17)
(18)
(19)

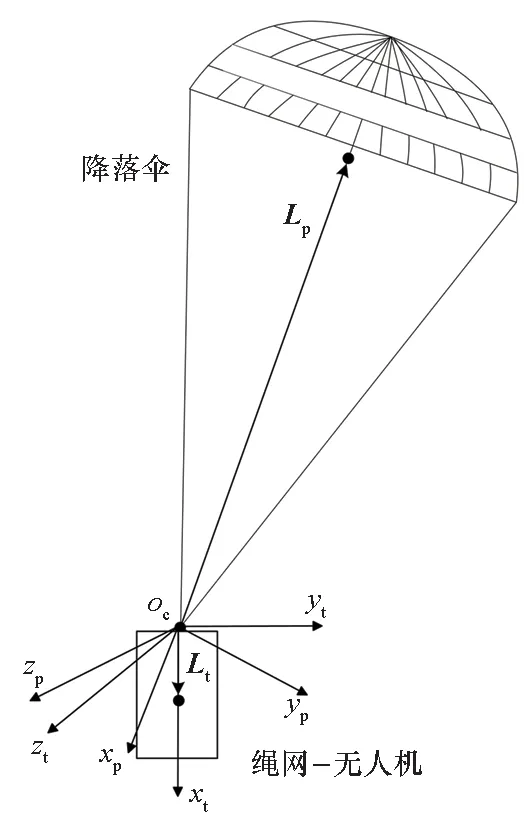
圖5 物-傘多體系統示意Fig.5 Parachute-payload multi-body system
3 仿真與試驗分析
對平臺飛行、繩網捕獲和降落傘回收全過程進行數值仿真分析,并基于試驗數據,分別對平臺飛行和繩網展開模型進行驗證。
3.1 試驗及仿真工況
結合網捕系統試驗,令質量為5 kg的無人機以40 km/h的速度平行于發射坐標系oDxD軸飛行,主要參數見表1。
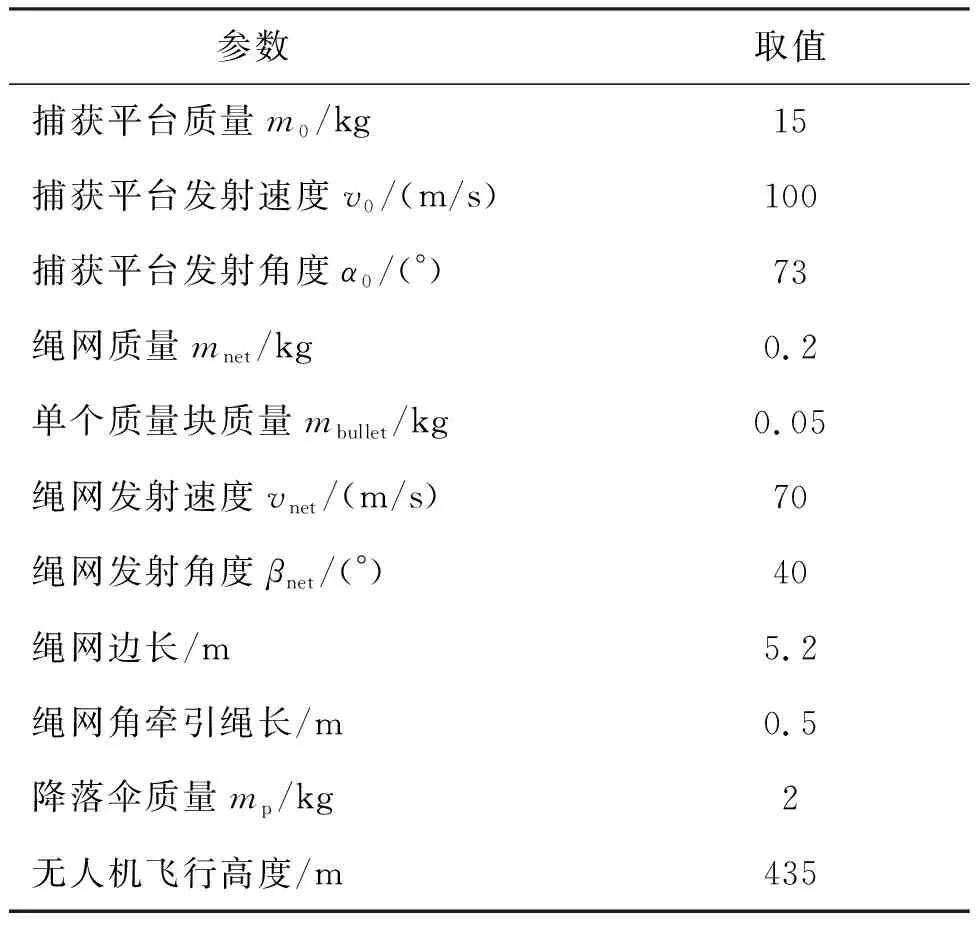
表1 主要系統參數
3.2 結果與分析
圖6為捕獲平臺的飛行仿真結果與試驗數據對比圖。圖中曲線吻合較好,最大的高度偏差約為17.2 m,對應偏差百分比約為4.6%,滿足工程任務要求,驗證了捕獲平臺仿真模型的有效性。
圖6 捕獲平臺飛行軌道試驗與仿真結果對比Fig.6 Comparison of test and simulation results of the flight path of the platform
圖7為繩網發射展開過程中網口直徑的仿真結果與高速圖像試驗測量數據對比圖。圖8為仿真得到的部分時刻繩網形狀變化圖。從圖7中可以看出,試驗與仿真的網口直徑隨時間的變化較為符合。且從圖8中可以看出,仿真中繩網先呈束狀牽引隨后網面迅速展開,通過定性地對比試驗圖像,吻合度較好,這驗證了繩網展開動力學模型的有效性。
圖7 網口直徑的試驗與仿真結果對比圖Fig.7 Comparison of the test and the of the diagonal length simulation results
(a) 0.03 s
忽略降落傘與繩網-無人機組合體的碰撞和碰撞之后的平衡過程,由動量定理計算得到狀態平衡之后的系統速度約為0.9 m/s,俯仰角約為83.3°。由于試驗測量條件限制,未能收集得到系統下落過程數據。
圖9為無人機捕獲全過程高度隨相對飛行時間的變化圖。第一階段,捕獲平臺以v0=100 m/s 和α0=73°的初始條件從地面發射,經過9.0 s飛行后升高到約435.1 m,此時捕獲平臺的俯仰角約為6.5°,速度約為27.3 m/s;第二階段,繩網質量塊以vnet=70 m/s 和βnet=40° 初始條件發射,在繩網展開過程中,向前飛行了約4.8 m,向上飛行了約0.5 m;第三階段,降落傘-繩網-無人機系統的下落時間約為69.4 s,著陸速度約為7.2 m/s[33]。
圖9 系統運動過程飛行高度隨時間的變化Fig.9 Flight altitude variation with time during system motion process
4 結論
本文針對無人機“黑飛”問題,基于項目組空間繩網和降落傘研究基礎,結合無人機“低、慢、小”等特點:提出了一種基于無人機繩網抓捕和降落傘回收的總體方案;建立了捕獲平臺的六自由度剛體動力學模型、繩網有限段的半阻尼彈簧模型和九自由度的降落傘-繩網-無人機動力學模型;進行全過程仿真,并通過部分系統試驗,對模型進行了驗證。仿真結果表明,繩網無人機捕獲系統方案可行,動力學模型有效。為繩網無人機捕獲系統的設計提供了理論依據。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19