永磁同步電機單電流傳感器系統的三相電流重構策略
2022-04-09 03:36:10許觀達連傳強劉計龍
電工技術學報 2022年7期
肖 飛 許觀達 連傳強 劉計龍
永磁同步電機單電流傳感器系統的三相電流重構策略
肖 飛 許觀達 連傳強 劉計龍
(海軍工程大學艦船綜合電力技術國防科技重點實驗室 武漢 430033)
電流傳感器受制造工藝與使用環境等因素的影響,在永磁同步電機驅動系統運行時可能失效。為提高系統的容錯控制能力,該文提出一種新的基于自適應觀測器的單電流傳感器矢量控制策略。該策略首先在旋轉坐標系下建立電流自適應觀測器的數學模型,然后對唯一可測量的相電流進行坐標變換與低通濾波,計算出電流自適應觀測器所需要的電流誤差信息,并使用粒子群算法對觀測器參數進行優化設計。半實物實時仿真結果表明與傳統方法相比,所提方法具有更好的動態與穩態性能以及更高的轉矩控制精度,并對電機參數具有良好的魯棒性。
永磁同步電機 單電流傳感器 自適應觀測器 粒子群優化算法 低通濾波
0 引言
永磁同步電機(Permanent Magnet Synchronous Machine,PMSM)具有運行效率高、功率密度高等優點,在工業驅動、船舶推進等領域應用廣泛[1-4]。
在永磁同步電機驅動系統中,相電流傳感器用來采集電機的相電流信息,是高性能閉環控制中不可或缺的環節。但受制于工藝水平或外部惡劣環境的影響,相電流傳感器可能會出現故障[5]。為了提高變頻器的可靠性,在相電流傳感器出現故障時,一方面要快速準確地診斷出故障類型并定位,為維修人員和用戶提供有效的故障信息,大大縮減產品的維修時間;另一方面要具備故障下的容錯控制能力,降低變頻器因故障停機而可能造成的經濟損失和人員傷亡[6]。
相電流傳感器故障容錯控制策略按照實現的方案可大致分為三類:一是開環控制;二是單相電流傳感器控制;三是無電流傳感器控制[7-8]。其中,開環控制方案存在較大誤差,無法實現高控制精度;無電流傳感器控制方案應對外界突變條件時的自抗擾能力弱[9]。文獻[10]分別基于電流估算和無電流環對永磁同步電機伺服控制系統實現了矢量控制,但仿真和實驗均為空載,未考慮轉矩對驅動系統的影響。實際三相永磁同步電機驅動系統具有2~3個相電流傳感器,同時出現故障的概率很小,此時可以采用單電流傳感器控制方案,利用一個可用電流傳感器配合電流重構算法獲得完整電流信息,實現三相永磁同步電機驅動系統的矢量控制。文獻[11]基于全階滑模觀測器和龍貝格觀測器,利用單電流傳感器實現了電流重構,但是忽略了空間電流矢量的方向變化,交直軸電流諧波較大,動態性能較差,在低轉速工況表現不佳。文獻[12]基于卡爾曼濾波器設計了單電流傳感器控制算法,但修正電流的計算不夠精確,控制性能不佳,電機轉矩精度低,有非周期性脈沖尖峰。
永磁同步電機在運行時若發生相電流傳感器失效,易導致電機控制發散或過電流,在此情況下可由電流傳感器故障診斷算法判別是否是相電流傳感器故障。目前,永磁同步電機驅動系統運行時的電流傳感器故障診斷方法已有相關研究,主要有基于信號的方法[13]和基于模型的方法[14]。通過這些方法可以診斷出各相電流傳感器是處于故障狀態還是正常工作狀態。在僅剩一相電流傳感器非故障時,可應用本文提出的基于自適應觀測器的單電流傳感器矢量控制策略進行容錯控制,在已知電機的轉子位置時,通過坐標變換和低通濾波計算出電流自適應觀測器所需要的電流誤差信息。控制簡單,利于工程實踐。本文在半實物實時仿真平臺上對提出的單相電流傳感器矢量控制策略進行了實時仿真。
1 PMSM數學模型
當PMSM的鐵心磁飽和、鐵損和渦流損耗忽略不計時,在旋轉d-q坐標系下PMSM的電流方程[15]為

其中
電磁轉矩方程為
式中,p為電機極對數。
2 三相電流重構策略
2.1 電流觀測器數學模型
直接使用上述方程對交直軸電流進行觀測屬于開環方式,由于系統的非理想特性,如死區、管壓降、電氣參數誤差等,開環觀測可能會導致較大誤差甚至發散,因此需要引入閉環環節對觀測量進行修正調節。采用式(1)的自適應觀測器對交直軸電流進行閉環觀測為





用式(5)與式(6)相減,可得

則

電流觀測器的算法框圖如圖1所示。
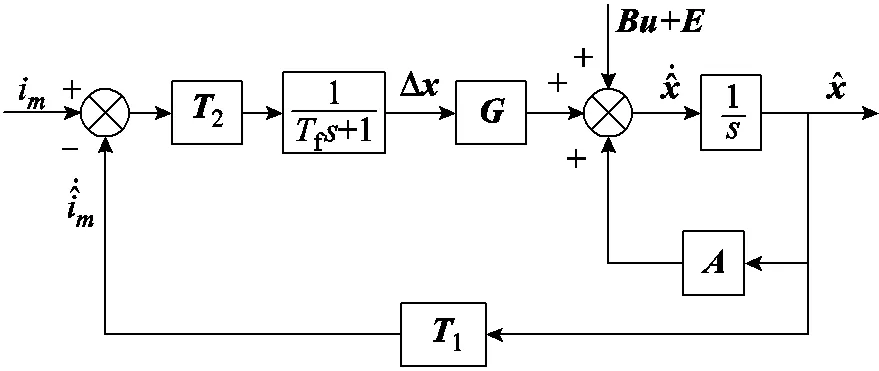
圖1 電流觀測器的算法框圖
圖1中

三相永磁同步電機閉環控制的反饋電流均可采用觀測器觀測到的交直軸電流信息。該方案可實現任意單相電流傳感器正常工作時的矢量控制。
2.2 電流自適應觀測器參數設計
對如圖1所示的電流觀測器建立小信號模型,為

其中

1)初始化組待設計的參數及搜索步長約束
根據經驗對參數和f進行初始化,設定=20,每組參數在式(14)所示的范圍內隨機選擇。
搜索步長約束為
2)工況及性能指標設定


若全部個工況均滿足上述約束條件,則令=1,否則=0。=1意味著系統在個工況下均穩定,但是穩定裕度尚不明確。
定義為全部個工況下所有極點實部的最大值(系統穩定,則值為負),為了讓系統在全工況下均有較大的穩定裕度,值應盡量小。因此定義適應度函數為
3)參數與搜索步長更新
根據PSO算法,其位置(即待優化的參數)和速度(即搜索步長)的更新公式[19]為


4)收斂判斷
當所有粒子的歷史最大適應度函數等于最大工況數,或者迭代次數達到設定的次數時,則判定算法收斂。
由上述方法可設計出控制參數和f。
3 半實物實時仿真驗證
PMSM單電流傳感器控制策略的半實物實時仿真驗證方案如圖2所示,利用Matlab搭建包含電機模型和驅動模型的Simulink仿真模型,利用HDL coder工具箱生成相應的HDL語言,并將其燒寫至FPGA芯片;FPGA與DSP通過數據上行和數據下行完成數據傳輸;DSP實現的主要功能包括電流觀測、矢量控制策略、PWM調制;并通過CAN卡連接上位機,實現上位機控制;這樣形成一個微型半實物仿真系統。其中,DSP芯片為TI公司的TMS320F28335,FPGA芯片為Cyclone Ⅳ E系列EP4CE115F2317。
在半實物實時仿真中,進行了三種永磁同步電機矢量控制策略的對比:一是兩個電流傳感器控制方案;二是基于文獻[20]的傳統電流滑模觀測器方案,此方案利用電流空間矢量誤差在α、β軸投影,通過電流滑模觀測器重構α、β軸電流誤差,實現電機驅動系統的單電流傳感器控制;三是本文提出的自適應觀測器控制方案。
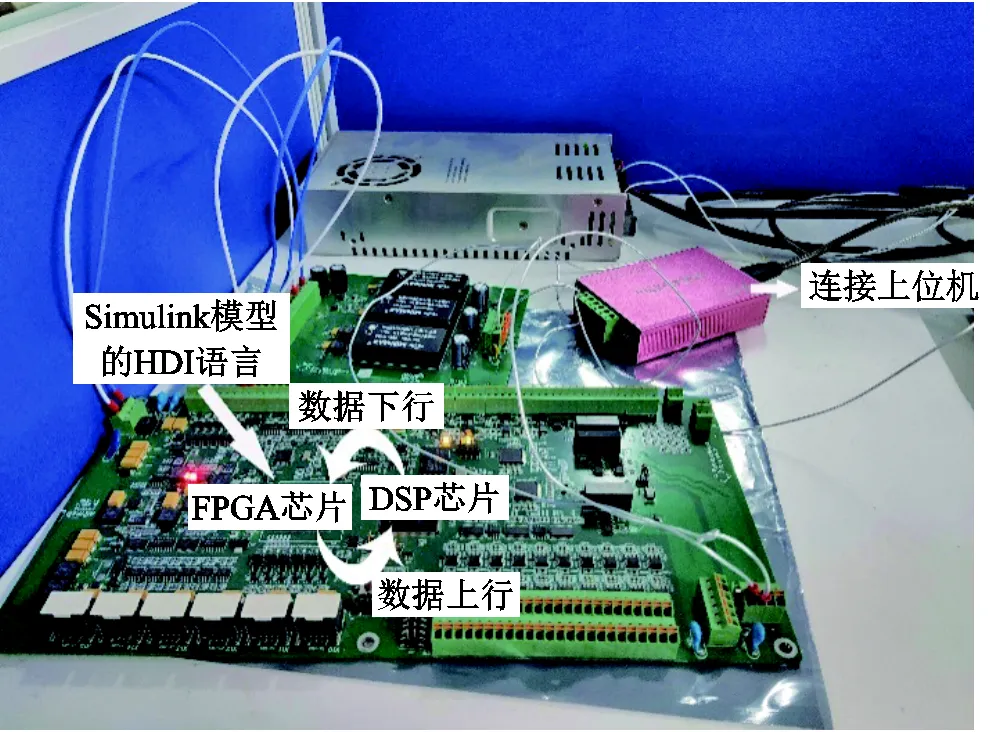
圖2 半實物實時仿真平臺
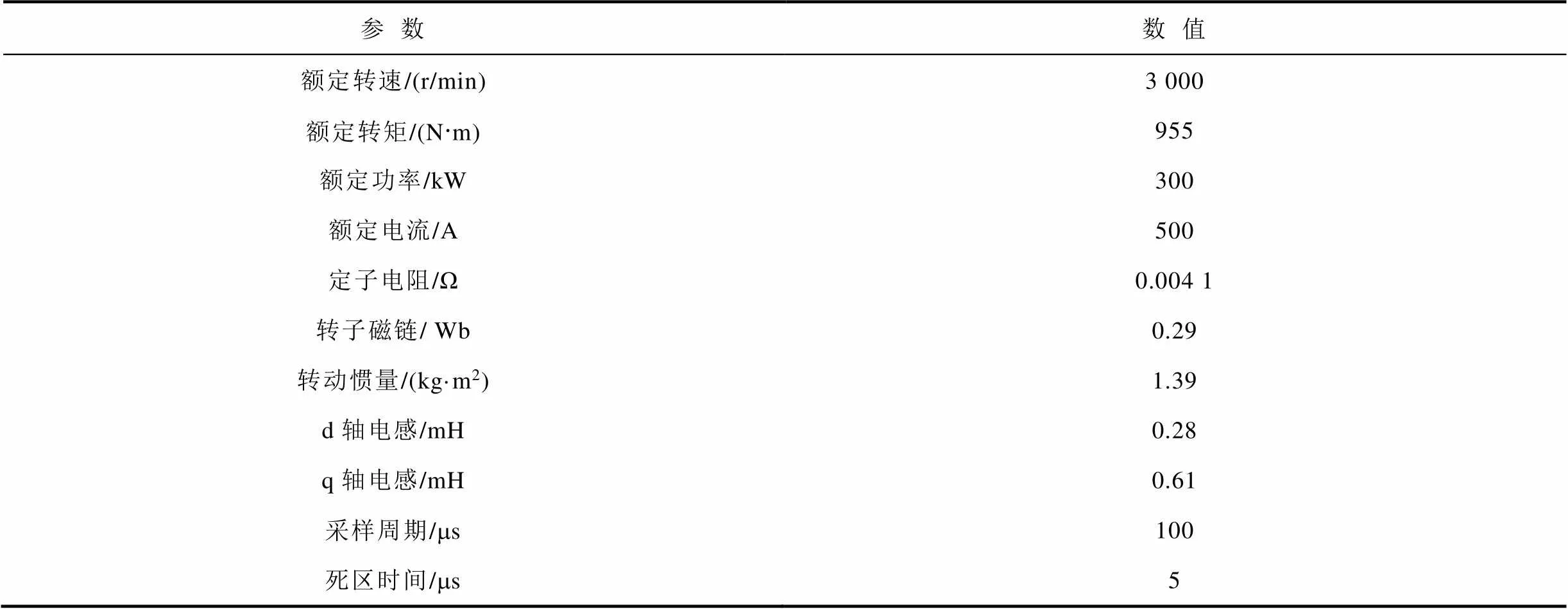
PMSM參數設計見表1。仿真條件設置為:SVPWM開關頻率5 kHz,直流側電壓DC= 900 V。為了方便比較和直觀顯示控制性能,本文波形圖縱坐標均為相應量的標幺值,基準值為額定值。
表1 PMSM參數設計
Tab.1 PMSM parameter design
(續)
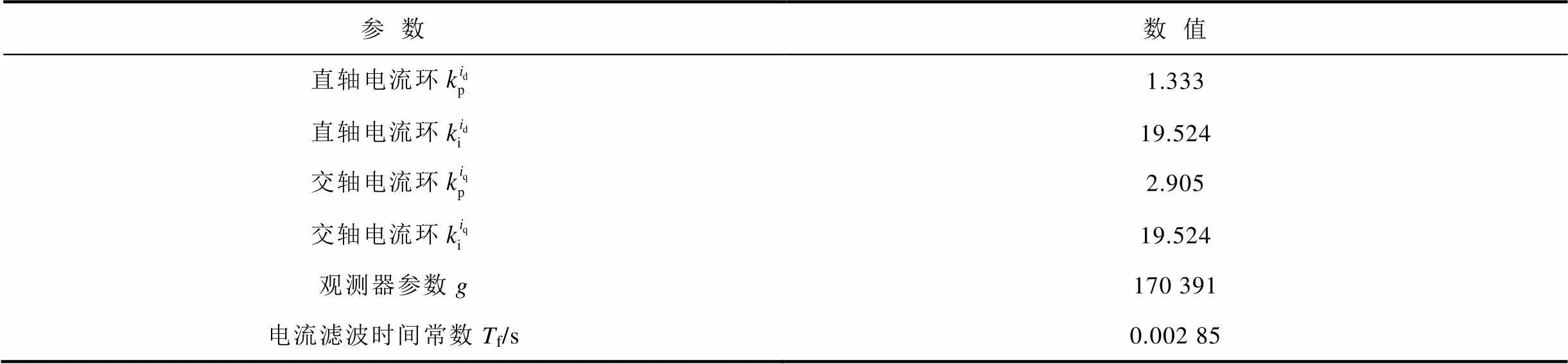
表1中的交直軸電流環PI參數由文獻[17]給出的PI參數整定算法結合PMSM設計參數計算得到。自適應觀測器控制參數和f由2.2節粒子群算法計算得到。
當A相電流傳感器可用時,利用單電流傳感器控制方法可觀測B、C相電流。當電機工作在額定轉速、額定轉矩工況時,不同控制方案的觀測電流和實際電流波形如圖3所示。結果表明,本文提出的方法相比于傳統電流滑模觀測器方案,相電流觀測誤差更小,觀測效果更準確。
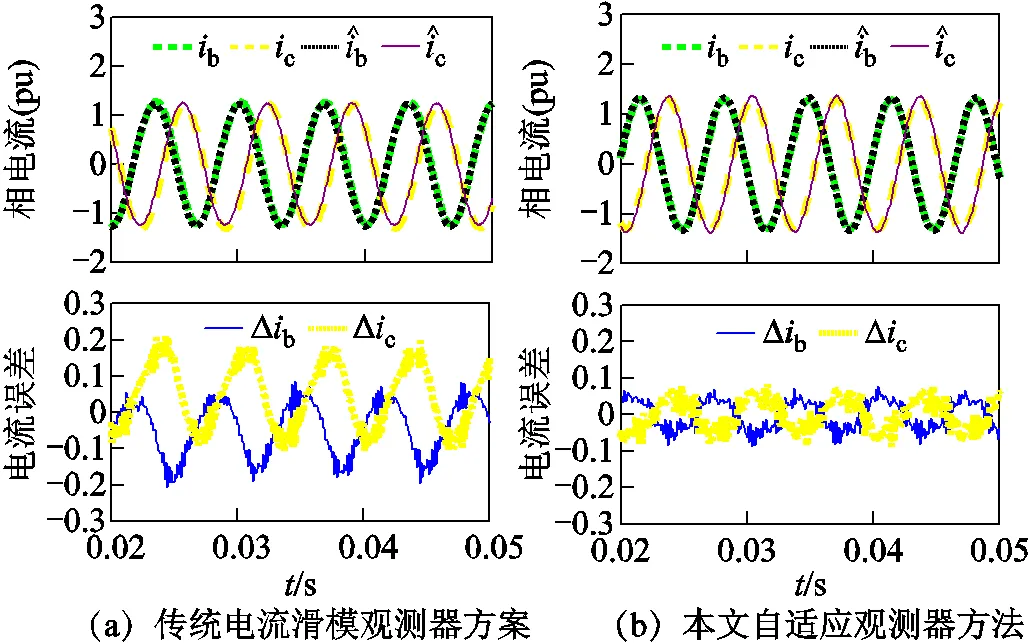
圖3 不同控制方法的觀測電流和實際電流波形
3.1 穩態特性
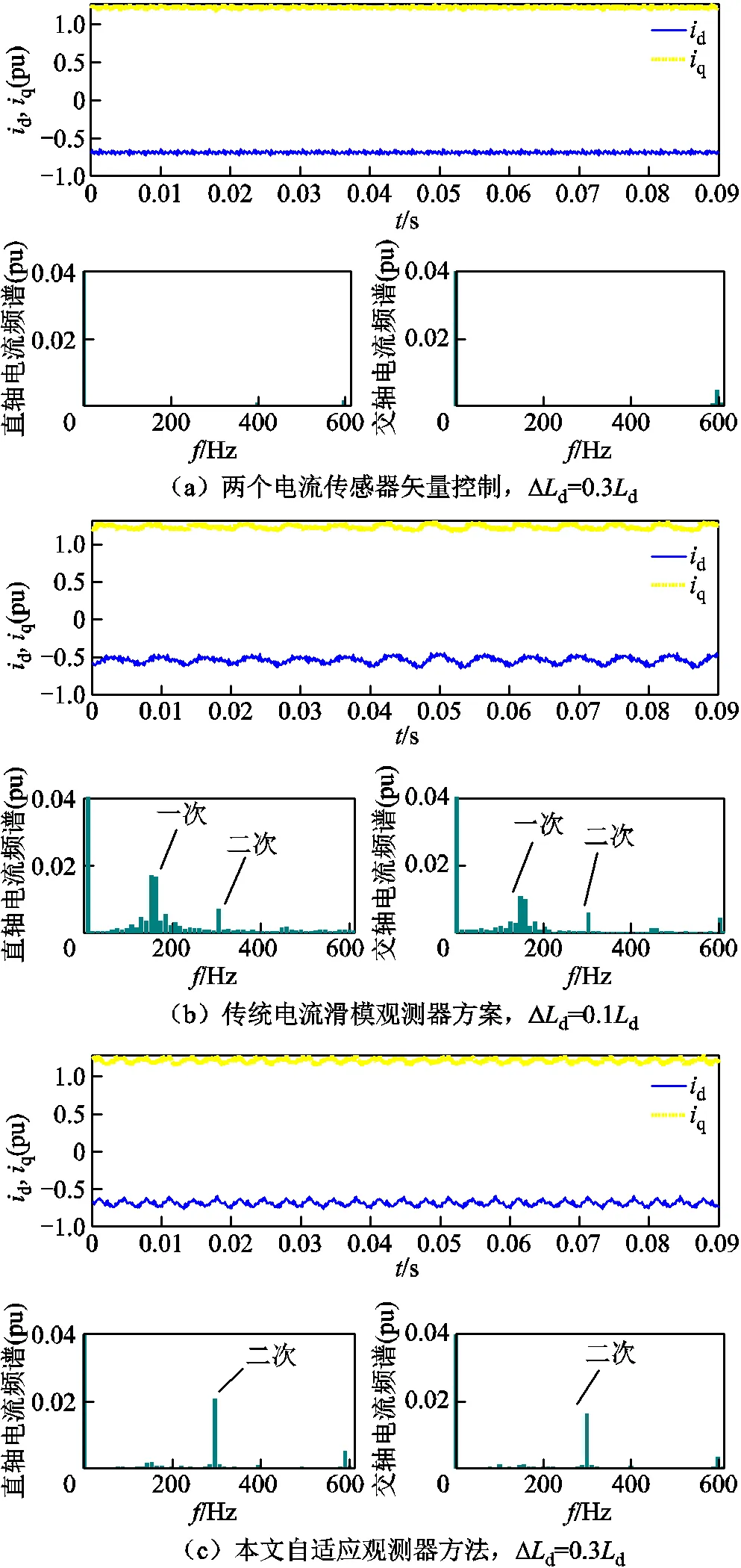
圖4 額速額載工況,不同控制方法交直軸電流及頻譜

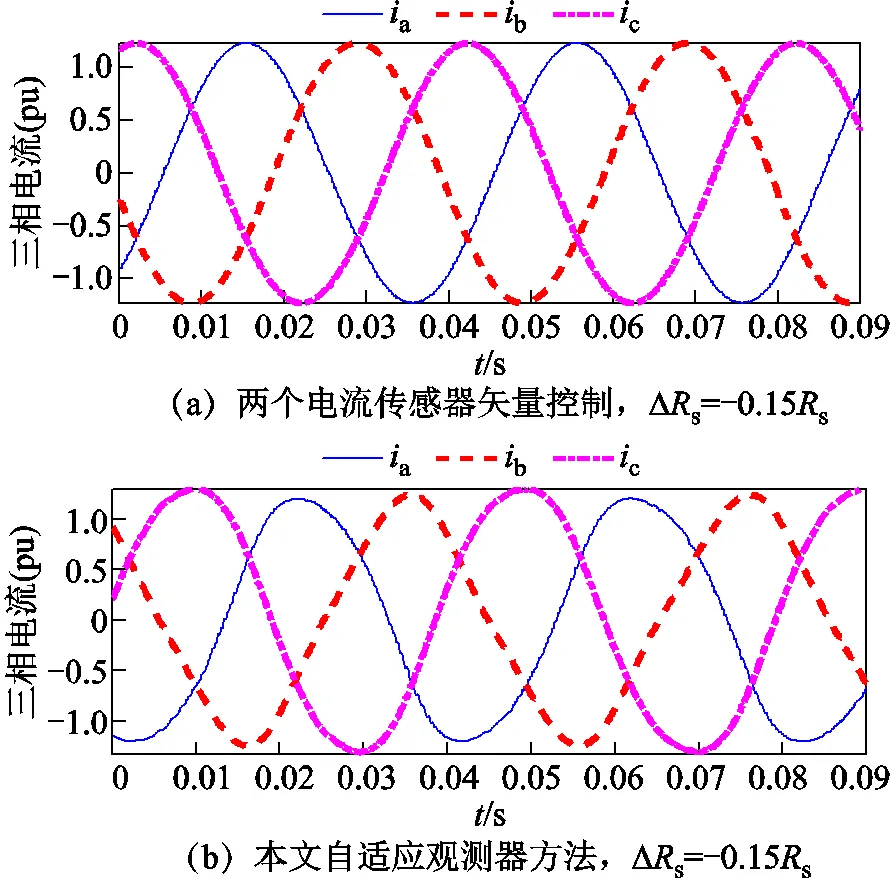
圖5 50r/min額載工況不同控制方法三相電流

表2 不同工況時交直軸電流諧波大小
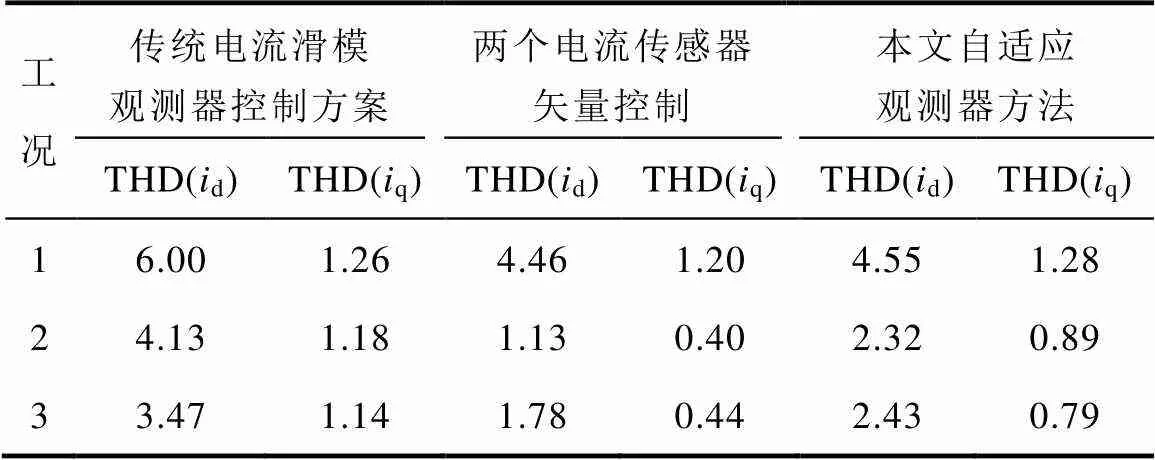
Tab.2 The dq-axis current harmonics under different working conditions (%)
GB/T 17626.7—2008《電磁兼容試驗和測量技術供電系統及所連設備諧波、諧間波的測量和測量儀器導則》中,THD定義為
式中,為諧波分量的有效值,它在表示電流時被代替,在表示電壓時被代替。
圖6給出了不同控制策略在不同工況穩態時的轉矩平均相對誤差大小。轉矩相對誤差定義為

式中,觀測轉矩由觀測電流、通過式(2)計算得到;實際轉矩由實際電流id、iq通過式(2)計算得到;電機參數采用電機實際運行參數。轉矩平均相對誤差指的是一段時間內轉矩相對誤差的平均值,反映了矢量控制方法的轉矩控制精度。圖6結果表明,本文提出的自適應觀測器方法轉矩控制精度遠好于傳統電流滑模觀測器方案,以3 000 r/min工況為例,本文自適應觀測器方法轉矩平均相對誤差對比傳統電流滑模觀測器控制方案,由4.45%下降到1.34%,下降幅度達到69.9%。
3.2 動態特性

量與d、q旋轉坐標系的夾角難以確定,尤其當轉矩突然變化時,此夾角的變化難以跟蹤,故動態性能表現不佳。仿真結果表明本文自適應傳感器方法交直軸電流振蕩幅值和振蕩時間明顯減小;與兩個電流傳感器矢量控制性能相近。
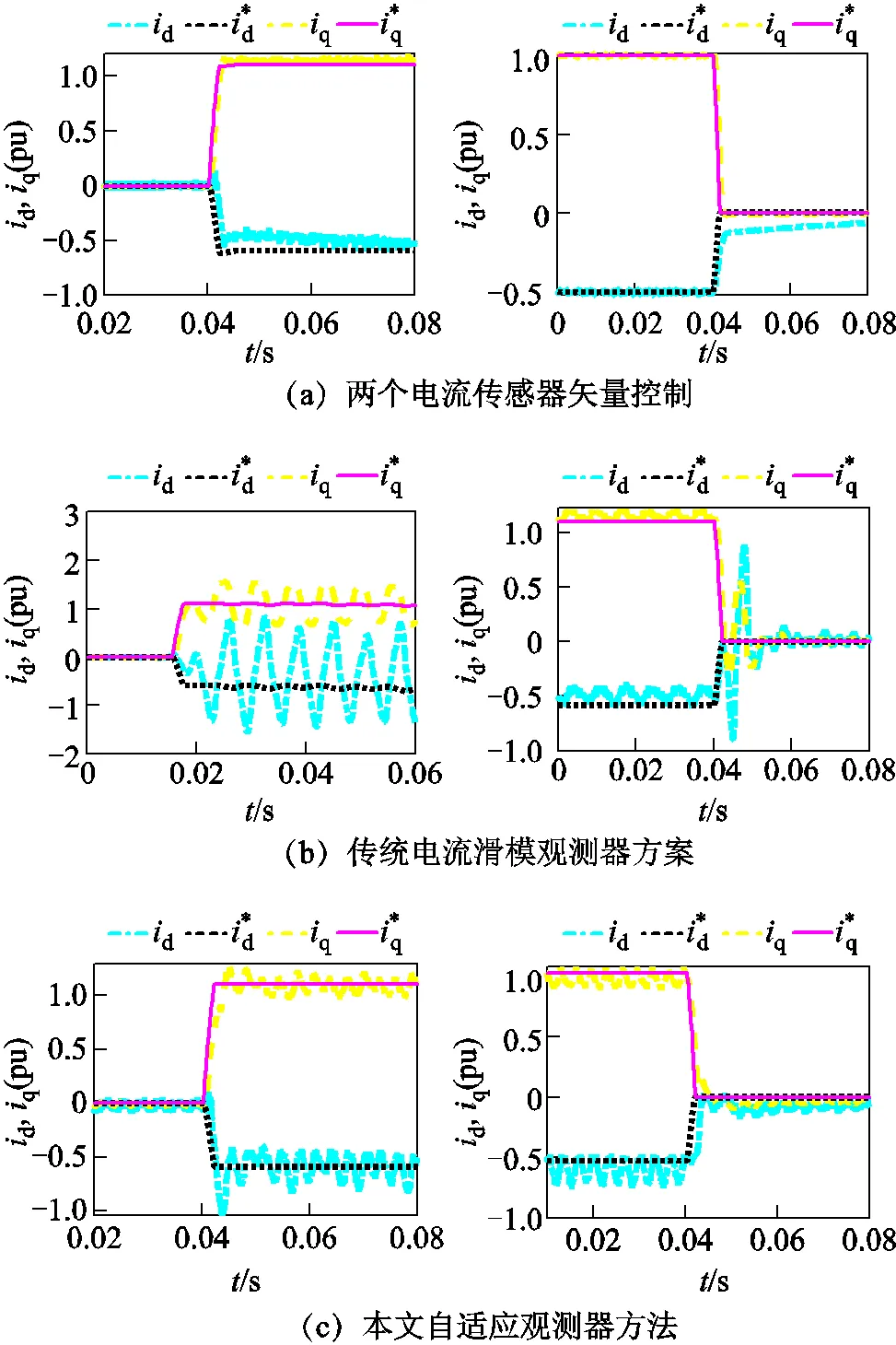
圖7 額定轉速下突加突卸額定轉矩

從全轉速工況下電流與速度波形可以看出,傳統電流滑模觀測器方案在加速階段交直軸電流變化不夠平滑,低速工況存在振蕩,動態性能表現不佳。本文自適應觀測器方法與兩個電流傳感器矢量控制方法的轉速動態控制性能十分接近,遠好于傳統電流滑模觀測器方案。
4 結論
本文提出一種基于自適應觀測器的三相永磁同步電機單電流傳感器矢量控制策略。首先詳細介紹了自適應觀測器的結構和參數設計方法,然后在半實物實時仿真平臺上對提出的單電流傳感器矢量控制策略進行仿真驗證。與傳統方法相比,本文自適應觀測器方法基本消除了交直軸電流中的1倍基頻諧波,電流總諧波和轉矩平均相對誤差明顯減小,穩態性能顯著提升;在突加突卸轉矩和轉速突變的動態過程中同樣具有良好的控制性能,并且對電機參數攝動有較強的魯棒性。
[1] 蔣錢, 盧琴芬, 李焱鑫. 雙三相永磁直線同步電機的推力波動及抑制[J]. 電工技術學報, 2021, 36(5): 883-892.
Jiang Qian, Lu Qinfen, Li Yanxin. Thrust ripple and depression method of dual three-phase permanent magnet linear synchronous motors[J]. Transactions of China Electrotechnical Society, 2021, 36(5): 883-892.
[2] 李垣江, 董鑫, 魏海峰, 等. 表貼式永磁同步電機轉速環復合PI無位置傳感器控制[J]. 電工技術學報, 2020, 35(10): 2119-2129.
Li Yuanjiang, Dong Xin, Wei Haifeng, et al. Sensorless compound PI control for surface permanent magnet synchronous motor speed regulation system[J]. Transactions of China Electrotechnical Society, 2020, 35(10): 2119-2129.
[3] 張偉偉, 肖飛, 劉計龍, 等. 軌道交通車輛永磁同步牽引系統斷電區穿越控制策略[J]. 電工技術學報, 2021, 36(16): 3483-3492.
Zhang Weiwei, Xiao Fei, Liu Jilong, et al. Control strategy for power-off area crossing of permanent magnet synchronous traction system of rail transit vehicles[J]. Transactions of China Electrotechnical Society, 2021, 36(16): 3483-3492.
[4] He Mingjie, Li Weiye, Peng Jun, et al. Multi-layer quasi three-dimensional equivalent model of axial-flux permanent magnet synchronous machine[J]. CES Transactions on Electrical Machines and Systems, 2021, 5(1): 3-12.
[5] Gao Zhiwei, Cecat C, Ding S X. A survey of fault diagnosis and fault-tolerant techniques—part i: fault diagnosis with model-based and signal-based approaches[J]. IEEE Transactions on Industrial Electronics, 2015, 62(6): 3757-3767.
[6] Khil S K E, Jlassi I, Cardoso A J M, et al. Diagnosis of open-switch and current sensor faults in PMSM drives through stator current analysis[J]. IEEE Transactions on Industry Applications, 2019, 55(6): 5925-5937.
[7] 崔宏偉. 永磁同步電機控制系統無電流傳感器技術的研究[D]. 蘭州: 蘭州交通大學, 2018.
[8] An Quntao, Sun Li, Sun Lizhi. Current residual vector-based open-switch fault diagnosis of inverters in PMSM drive systems[J]. IEEE Transactions on Power Electronics, 2015, 30(5): 2814-2827.
[9] 應黎明, 杭翠翠, 舒乃秋, 等. 永磁同步電機傳感器故障診斷及容錯控制[J]. 電機與控制學報, 2020, 24(1): 45-52.
Ying Liming, Hang Cuicui, Shu Naiqiu, et al. Permanent magnet synchronous motor fault diagnosisand fault-tolerant control[J]. Electric Machines and Control, 2020, 24(1): 45-52.
[10] 孫宇航. 永磁同步電機無電流傳感器伺服控制技術研究[D]. 杭州: 浙江大學, 2020.
[11] 王國鑫. 永磁電機驅動系統傳感器故障診斷與容錯控制[D]. 哈爾濱: 哈爾濱工業大學, 2018.
[12] Beng G F H, Zhang Xinan, Vilathgamuwa D M. Sensor fault-resilient control of interior permanent-magnet synchronous motor drives[J]. IEEE/ASME Transactions on Mechatronics, 2015,20(2): 855-864.
[13] Khil S K E, Jlassi I, Estima J O. Current sensor fault detection and isolation method for PMSM drives, using average normalized currents[J]. Control Engineering Practice, 2016, 52(17): 1434-1435.
[14] 袁臣虎, 王歲, 劉曉明, 等. 基于PMSM的EPS系統電流傳感器零點誤差在線標定策略研究與調控實現[J]. 電工技術學報, 2018, 33(15): 3635-3643.
Yuan Chenhu, Wang Sui, Liu Xiaoming, et al. On line calibration strategy and regulation implementation of EPS system current sensor zero error based on PMSM[J]. Transactions of China Electrotechnical Society, 2018, 33(15): 3635-3643.
[15] 連傳強, 肖飛, 高山, 等. 基于實驗標定及雙時間尺度隨機逼近理論的內置式永磁同步電機參數辨識[J]. 中國電機工程學報, 2019, 39(16): 4892-4898, 4991.
Lian Chuanqiang, Xiao Fei, Gao Shan, et al. Parameter identification for interior permanent magnet synchronous motor based on experimental calibration and stochastic approximation theory with two time scales[J]. Proceedings of the CSEE, 2019, 39(16): 4892-4898, 4991.
[16] 於鋒, 朱晨光, 吳曉新, 等. 基于矢量分區的永磁同步電機三電平雙矢量模型預測磁鏈控制[J]. 電工技術學報, 2020, 35(10): 2130-2140.
Yu Feng, Zhu Chenguang, Wu Xiaoxin, et al. Two-vector-based model predictive flux control of three-level based permanent magnet synchronous motor with sector subregion[J]. Transactions of China Electrotechnical Society, 2020, 35(10): 2130-2140.
[17] Kan Liu, Zhu Z Q. Fast determination of moment of inertia of permanent magnet synchronous machine drives for design of speed loop regulator[J]. IEEE Transactions on Control Systems Technology, 2017, 25(5): 1816-1824.
[18] 賴紀東, 謝天月, 蘇建徽, 等. 基于粒子群優化算法的孤島微電網電壓不平衡補償協調控制[J]. 電力系統自動化, 2020, 44(16): 121-129.
Lai Jidong, Xie Tianyue, Su Jianhui, et al. Coordinated control of voltage unbalance compensation in islanded microgrid based on particle swarm optimization algorithm[J] Automation of Electric Power Systems, 2020, 44(16): 121-129.
[19] 李家祥, 汪鳳翔, 柯棟梁, 等. 基于粒子群算法的永磁同步電機模型預測控制權重系數設計[J]. 電工技術學報, 2021, 36(1): 50-59, 76.
Li Jiaxiang, Wang Fengxiang, Ke Dongliang, et al. Weighting factors design of model predictive control for permanent magnet synchronous machine using particle swarm optimization[J]. Transactions of China Electrotechnical Society, 2021, 36(1): 50-59,76.
[20] 周洪雷. 內置式永磁電機驅動系統電流傳感器故障容錯控制[D]. 哈爾濱: 哈爾濱工業大學, 2019.
Three-Phase Current Reconstruction Strategy of Permanent Magnet Synchronous Machine Drives Using a Single Current Sensor
Xiao Fei Xu Guanda Lian Chuanqiang Liu Jilong
(National Key Laboratory of Science and Technology on Vessel Integrated Power System Naval University of Engineering Wuhan 430033 China)
Affected by factors such as manufacturing process and use environment, the current sensor may fail when the permanent magnet synchronous machine drive system is running. To improve the fault-tolerant control ability of the system, a new vector control strategy using a single current sensor is proposed based on the adaptive observer. First, the mathematical model of the current adaptive observer is established in the rotating reference frame; then, the coordinate transformation and low-pass filtering are carried out for the only measurable phase current to calculate the current error information, which is needed by the current adaptive observer. Finally, the particle swarm optimization (PSO) algorithm is employed to design the observer parameters. The hardware-in-the-loop real-time simulation results show that compared with the traditional method, the proposed method has better dynamic and steady-state performance, higher torque control accuracy, and good robustness to motor parameters.
Permanent magnet synchronous machine, single current sensor, adaptive observer, particle swarm optimization algorithm, low-pass filtering
10.19595/j.cnki.1000-6753.tces.210459
TM351
肖 飛 男,1977年生,教授,博士生導師,研究方向為電力電子及電氣傳動等。E-mail:xfeyninger@qq.com
連傳強 男,1986年生,博士,副研究員,研究方向為電機系統及其控制、人工智能。E-mail:wzdslcq@163.com(通信作者)
2021-03-31
2021-06-16
國家自然科學基金青年科學基金資助項目(51807200)。
(編輯 郭麗軍)
