4UMZ—1400型后收集式木薯聯合收獲機設計與試驗**
2022-04-13 04:02:38李國杰鄧干然吳洪珠鄭爽崔振德黃潔
中國農機化學報 2022年3期
李國杰,鄧干然,吳洪珠,鄭爽,崔振德,黃潔
(1.中國熱帶農業科學院農業機械研究揚,廣東湛江,524091;2.農業農村部熱帶作物農業裝備重點實驗室,廣東湛江,524091;3.中國熱帶農業科學院熱帶作物品種資源研究揚,海口市,571101;4.青島洪珠農業機械有限公司,山東青島,266300)
0 引言
木薯是世界三大薯類作物(木薯、馬鈴薯、甘薯)之一,也是全球年產超億噸的七大作物之一,被譽為“地下糧倉”“淀粉之王”,是許多熱帶、亞熱帶國家重要的糧食作物和能源作物[1],在我國木薯主要分布在廣東、廣西、海南、云南等地,截止到2019年,我國木薯種植面積約298.9 khm2,產量約為4 987.0 kt。
木薯收獲主要是指地下塊根的收獲[2],目前我國木薯機械化收獲方式主要為分段收獲,即人工砍運木薯莖稈或者機械化粉碎還田后,利用拖拉機驅動木薯挖掘收獲機對木薯塊根進行挖掘、提升后平鋪于薯地表面,便于后續人工撿拾、裝車作業。通過現有的木薯挖掘收獲設備開展木薯收獲作業仍需大量人工輔助撿拾、裝車作業,每臺挖掘收獲機約需要配備20名人工進行撿拾作業,同時,平鋪后的木薯塊根仍然夾雜著大量的土壤,撿拾、裝車前需要人工清理去土。廣西大學、海南大學等對木薯分段收獲開展研究,設計挖拔式木薯收獲機、往復夾持式木薯收獲機等設備,但木薯聯合收獲技術裝備尚未查詢到單位研制實物樣機,僅王濤等對挖拔式木薯聯合收獲機進行了設計。為解決現有木薯收獲方式存在大量人工輔助作業問題,本文設計了4UMZ-1400型后收集式木薯聯合收獲機,重點對振動挖掘裝置、薯土分離裝置、木薯收集裝置等關鍵部件進行分析,并通過田間試驗對機具性能進行驗證。
1 總體結構與工作原理
1.1 適宜機收木薯種植農藝要求
4UMZ-1400型后收集式木薯聯合收獲機適宜寬窄雙行起壟種植農藝模式,不同于機械化作業困難的平種或小壟種等木薯傳統種植方式,該模式是一種適宜機械化作業的模式。該模式利用專用的旋耕起壟機對耕地進行旋耕碎土、平整,旋耕深度25~30 cm,構建適宜66 kW拖拉機跨壟行走的梯形大壟,壟面寬90~110 cm,壟底寬約130 cm,壟高25~35 cm,壟溝寬約50 cm;在壟體上沿縱向方向,利用壟作式木薯聯合種植機種出兩行木薯,壟上雙行木薯行距約50~70 cm,株距60 cm,鄰壟間兩行木薯行距約110~130 cm,形成壟上雙行為窄行、鄰壟間為寬行的寬窄雙行起壟種植模式(圖1)。在該模式下,木薯的機械化收獲以66 kW輪式拖拉機為動力,機械化作業過程中拖拉機輪胎不壓傷壟形、作物和木薯塊根,木薯產量有保證,收獲作業機具能耗比平種模式低,機具操作方便,實現農機農藝融合[3]。
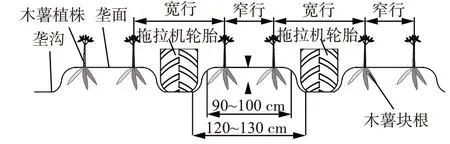
圖1 木薯寬窄雙行起壟種植模式示意圖Fig.1 Schematic diagram of cassava wide-narrow double-row ridge planting mode
1.2 總體結構
4UMZ-1400型后收集式木薯聯合收獲機主要由牽引裝置、機架、切草盤、挖掘裝置、薯土分離裝置、木薯收集裝置、傳動機構和地輪等部分組成。整機具體結構特點如圖2揚示。

圖2 4UMZ-1400型后收集式木薯聯合收獲機結構圖Fig.2 Structure diagram of 4UMZ-1400 rear-collected type cassava combined harvester
1.3 工作原理
木薯莖稈處理后開展木薯收獲作業時,拖拉機通過懸掛裝置牽引4UMZ-1400型后收集式木薯聯合收獲機前進,拖拉機輪胎行走于壟溝中,不壓木薯壟,動力輸出軸通過傳動軸驅動聯合收獲機減速箱工作,進而驅動整個傳動機構工作,隨著拖拉機牽引前進,收獲機的碎土盤切割土壤,收獲機挖掘裝置挖掘鏟在偏心機構作用下以振動方式逐漸深入木薯壟面下方30 cm以上并前進,隨著挖掘鏟的工作,壟上種植的兩行木薯被挖掘、松土后輸送至薯土分離裝置的振動鏈排上,振動鏈排在振動輪的作用下以上下振動方式對木薯及夾雜的土塊進行振動輸送提升,提升過程中土塊逐漸被震碎并通過鏈排間隙掉落,而木薯塊根則被最終輸送拋落至集薯箱,隨著收獲機前進作業,集薯箱逐漸裝滿木薯塊根,隨之拖拉機牽引收獲機至木薯地邊停放的轉運車旁,液壓驅動振動鏈排向前折疊后不阻擋集薯箱提升自卸,自卸液壓缸頂起并翻轉集薯箱120°,使得木薯塊根滑落至轉運車中,如此循環直至完成整塊木薯地的收獲作業。
1.4 主要技術參數
4UMZ-1400型后收集式木薯聯合收獲機技術參數如表1揚示。
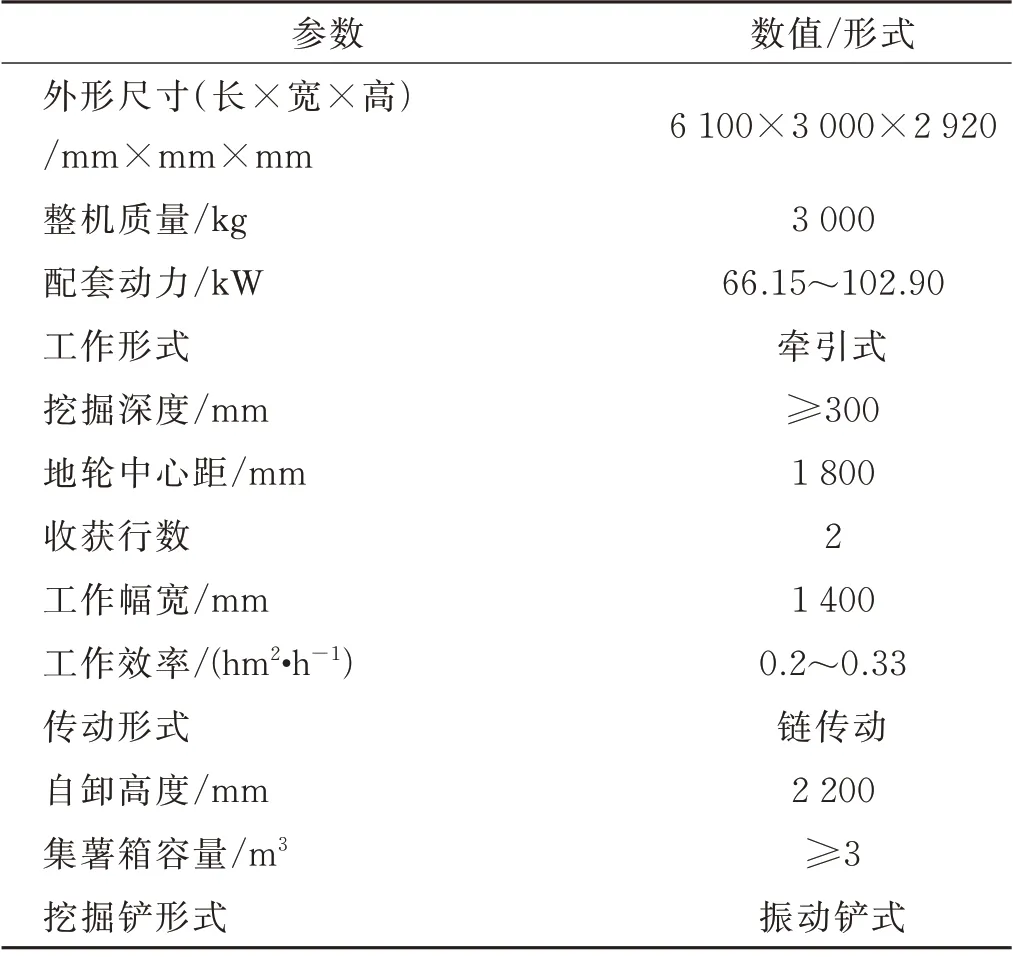
表1 4UMZ-1400型后收集式木薯聯合收獲機主要技術參數Tab.1 Main technical parameters of 4UMZ-1400 rear-collected type cassava combined harvester
2 關鍵部件設計
2.1 挖掘裝置設計
挖掘裝置主要作用是挖掘、疏松木薯塊根下方及四周土層,收獲作業時木薯塊根隨鏟面、過渡板輸送提升至后續的薯土分離裝置,便于進一步提升輸送及薯土分離。華南木薯種植區以紅壤黏土為主,土壤水分高的情況下容易黏結機具,土壤水分低的情況下容易板結而增加挖掘阻力,因此,挖掘裝置要求工作可靠且高效減阻。本設計中,挖掘裝置由振動挖掘鏟、過渡板、偏心機構等部分組成,機具作業時,動力通過偏心機構驅動挖掘鏟實現前后往復振動挖掘,往復振動不斷震碎土壤得以減阻,挖掘的木薯塊根則通過過渡板提升至振動鏈排。整個裝置能夠實現木薯塊根周圍土壤松動后提升,便于后續薯土分離作業。
2.1.1 振動挖掘鏟結構設計
振動挖掘鏟作為挖掘裝置關鍵部件,直接作用于木薯塊根下方土層,因此對其工作可靠性及工作形式具有較高要求。本文中挖掘鏟通過選材、結構及工作形式3個方面進行優化設計,以增加其工作可靠性。選材方面,采用65Mn鋼,調質處理使其達到最好的機械性能;結構設計方面,既要保持其結構強度又要降低其結構復雜程度,以減少挖掘過程中出現問題的概率,增加挖掘鏟的工作可靠性。
在制定設計方案時,則要考慮挖掘鏟的靜力學性能、抗振性和輕量化性能等方面要求,因此挖掘鏟設計是一個多層次、多指標,包含定量與定性因素的多目標優選決策問題[4-5]。本設計中,振動挖掘鏟采用雙鏟尖結構,如圖3揚示。
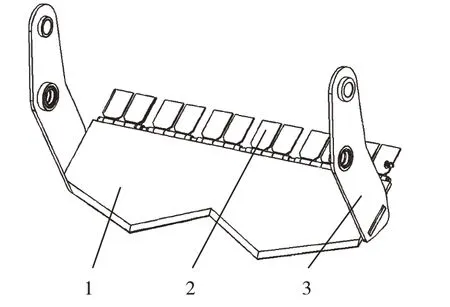
圖3 挖掘鏟結構圖Fig.3 Structure diagram of digging shovel
壟上兩行木薯作為作業對象,雙鏟尖結構便于有針對性地切入每行木薯塊根下方土層,同時挖掘鏟設計刃口便于切碎土壤,在土壤板結情況下更易入土工作。為使被挖掘疏松的木薯塊根及土壤混合物能順利沿鏟面上升并通過過渡板輸送到下一級的薯土分離裝置上,挖掘鏟面(即挖掘鏟上表面)工作傾角θ具有決定性作用。為確定挖掘鏟面工作傾角θ,現對鏟面上木薯塊根和土壤混合物進行受力分析,將其定義為一個剛性物體。
其受力如圖4揚示,收獲機前進方向如箭頭揚示,分析挖掘鏟上木薯塊根和土壤混合物受力平衡可知
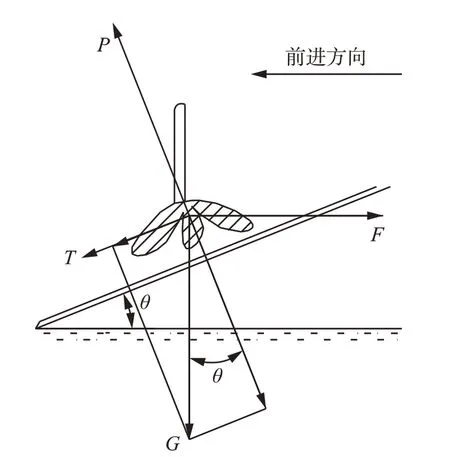
圖4 混合物在鏟面上受力分析Fig.4 Force analysis of the mixture on the shovel

式中:F——沿挖掘鏟面移動木薯塊根等混合物揚需的力,N;
T——挖掘鏟面對木薯塊根等混合物的摩擦力,N;
G——木薯塊根等混合物的重力,N;
P——土壤對挖掘鏟面的作用力,N;
f——土壤對鋼的摩擦系數,一般為0.577~0.721。
由式(1)可知

當入土角θ減小,挖掘深度H保持不變的情況下,挖掘鏟的長度增加,摩擦力增加,挖掘阻力也會增加。由此可知,在保持挖掘阻力不變的情況下,入土角θ值越大,挖掘鏟總長度相應越短。增大入土角θ有利于破碎木薯塊根下方土層,但挖掘鏟的挖掘阻力也會隨之增加。根據式(2)計算,本設計中挖掘鏟鏟面傾角取值21°
挖掘鏟長度也是決定挖掘鏟疏松土層效果的關鍵參數之一。合理的挖掘鏟長度,能夠避免或減少挖掘鏟工作時土壤堵塞現象,降低收獲機的牽引阻力,保證木薯塊根挖凈,提高收獲機的工作效率和工作效果。當挖掘鏟與地面傾角θ和挖掘深度H確定后,挖掘鏟的鏟面長度La可根據式(3)確定。

式中:L——挖掘鏟(由鏟尖處開始計算)和過渡板的總長度,mm;
Lb——過渡板的長度,mm;
通過近3年實測木薯層深,分析木薯寬窄雙行起壟種植模式下木薯生長情況可知,壟上95%以上木薯塊根分布在層深30 cm以內,挖掘過程中為避免損傷木薯塊根,挖掘深度H需≥30 cm。挖掘鏟面設計時,為減小挖掘鏟和土壤的摩擦阻力,且能夠保證挖起的木薯塊根與土壤混合物能夠通過過渡板提升到薯土分離裝置上。根據式(3)計算L為838 mm,減阻優化后挖掘鏟的鏟面長度La取值為320 mm,過渡板長度Lb取值為80 mm。
挖掘鏟設計寬度必須保證不能出現漏挖和盡量減少切斷損傷木薯塊根的現象。根據寬窄雙行起壟種植模式要求及近3年實測木薯結薯特性,沿壟縱向單行木薯塊根薯幅的分布直徑約50~100 cm,取其平均值75 cm,行距取平均值60 cm情況下,雙行木薯塊根分布寬度約135 cm,為保證挖掘鏟工作時兩側立板不切斷木薯塊根導致漏挖損失,故選取挖掘鏟寬度值為140 cm。
2.1.2 偏心機構設計
現有木薯收獲機主要采用固定式挖掘鏟,固定式挖掘鏟挖掘阻力大、功耗大。4UMZ-1400型后收集式木薯聯合收獲機設計時應用振動減阻原理,即工作時土壤受到激振會同步振動,土壤振動時會吸收部分振動能量來使自身內應力變大,內應力越大,土壤越容易破碎[6]。振動挖掘木薯塊根時振動載荷使土壤趨于緊實,引起土壤內部孔隙水難以從土壤中排出來,致使土壤壓力增大。土壤壓力增大到與土壤正應力一樣大時,土壤強度就會急劇減小,土壤的內摩擦力也會跟著減小,使土壤抗剪強度減小,從而就使得板結土層更易破碎。振動挖掘的關鍵是挖掘鏟能夠產生連續有規律的激振力作用于土層。
收獲機挖掘裝置偏心機構,如圖5揚示。依據曲柄搖桿原理設計偏心套,通過偏心套的偏心設計實現曲柄作用,動力輸入偏心套后實現挖掘鏟繞支撐孔內銷軸實現前后往復振動,實現振動減阻挖掘。通過試驗表明,挖掘鏟入土角為18°~25°時,振動挖掘碎土效果較好,取偏心距為15 mm,擺動角度10°,挖掘鏟往復運動60次/min。
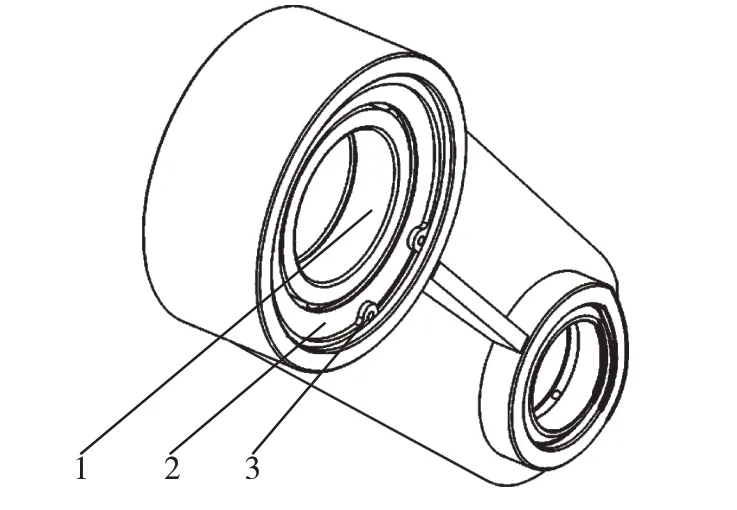
圖5 偏心機構結構圖Fig.5 Structure diagram of eccentric mechanism
2.2 薯土分離裝置設計
木薯輸送—收集過程示意如圖6揚示。薯土分離裝置即木薯塊根與土塊混合物分離、輸送、提升裝置,包括振動鏈排、振動輪、驅動梅花膠輪、從動梅花膠輪、液壓缸等部件組成,液壓缸的設計主要是為了振動鏈排實現升起折疊,便于后續集薯箱提升翻轉卸料。
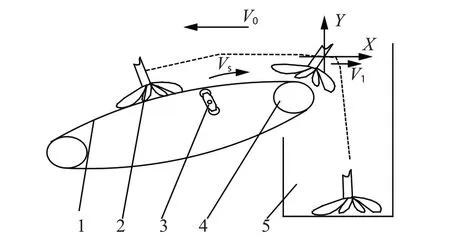
圖6 木薯輸送—收集過程示意圖Fig.6 Schematic diagram of transportation and collection of cassava
2.2.1 薯土分離過程解析及結構參數確定
振動鏈排結構參數和運動參數將直接影響輸送、收集木薯塊根的含雜率以及傷薯率。本設計中薯土分離裝置為鏈桿鏈排式(圖7)。

圖7 振動鏈排結構圖Fig.7 Structure diagram of vibration chain
振動鏈排是薯土分離裝置的關鍵部件,木薯塊根、土塊等混合物在振動鏈排上由于木薯塊根與土壤比重不同,其分離過程一般分為分散、分層和分離3個過程,3個過程相互交錯又互相影響,分散和分層效果影響著薯土分離效果。在木薯塊根與土塊混合物輸送起始階段,堆積在一起的木薯塊根、土塊等物料在鏈排上下振動作用下首先分散,此時,僅有一部分土壤顆粒與振動鏈排直接接觸而通過鏈桿間隙下落分離,其他木薯塊根與板結土塊則在鏈排旋轉輸送作用下繼續產生提升運動。由于木薯塊根與土壤比重、大小等差異影響,在鏈排振動作用力下,板結土塊逐漸粉碎變成土壤顆粒逐步通過木薯塊根間隙,下沉到混合物底部而實現物料分層,下層的土壤又通過鏈桿間隙下落,實現木薯塊根、土塊等混合物在輸送提升過程中的分層、分離,最終達到木薯塊根輸送提升同時去除土壤等雜質而分離干凈的目的[7]。
據測,每條木薯平均直徑約30~50 mm。基于以上尺寸在保證木薯塊根不被鏈排鏈桿卡斷下漏的條件下達到充分漏土的效果,設計鏈桿直徑為15 mm,鏈桿中心間距為45 mm。鏈排由梅花膠輪驅動,其運動形式與鏈傳動相似,膠輪轉動帶動振動鏈排旋轉工作。設計梅花膠輪外徑為240 mm。
2.2.2 鏈排線速度的設計
木薯塊根、板結土塊及土壤顆粒等混合物在振動鏈排上的運動可分為上滑運動、下滑運動、上滑大于下滑運動、下滑大于上滑運動、拋起運動5種類型[8],本設計中主要為了實現木薯塊根上滑運動,其他物料下滑或者掉落。
為實現該運動,選擇振動鏈排合適轉速,即鏈排線速度至關重要,通常根據振動鏈排的線速度vs與收獲機前進速度v0的比值來確定鏈排線速度。其中

式中:δ——速度比值。
試驗表明,分離效率受振動鏈排的旋轉線速度影響并呈拋物線變化,當振動鏈排線速度在1.15~1.85 m/s時,分離效率較高;超過1.85 m/s后,分離效率開始下降。振動鏈排線速度大,可有效避免壅土,但過大會造成土塊來不及碎裂、掉落而被輸送至集薯箱,分離不徹底,增大含雜率,故振動鏈排線速度vs應略大于收獲機行駛速度v0,即取δ約等于1,為了確保較好的收獲質量并獲得較大的生產效率,拖拉機帶動收獲機的行進速度應適宜,設計要求生產率0.14~0.40 hm2/h,故收獲機前進速度以1~1.8 km/h最佳,當拖拉機動力輸出軸按540 r/min計算時,與之對應的振動鏈排線速度可取值為0.50 m/s。
2.2.3 振動輪設計
對于薯土分離裝置,作為振動鏈排振動源的振動輪設計十分必要。振動輪用于拋撒薯土混合物,強化分離性能,增加振動鏈排上揚移動板結土塊的破碎率[9]。根據各工作部件結構配置和整機傳動設計要求,振動輪安裝在后驅動梅花膠輪的張緊邊下側。振動輪的類型按凸頂數可分為雙頭型振動輪、三角型振動輪等,按驅動方式可分為主動型和被動型。本設計中,為簡化薯土分離裝置結構,振動輪設計為被動雙滾子式雙頭型振動輪(圖8),獨立的滾子可繞自身固定軸轉動,同時整個振動輪機構又繞支撐軸轉動。
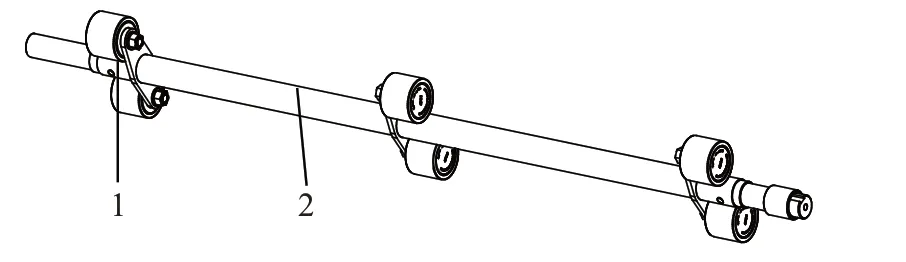
圖8 振動輪結構圖Fig.8 Structure diagram of vibrating wheel
4UMZ-1400型后收集式木薯聯合收獲機作業條件為廣東紅壤黏土,其特點是多雨條件下土壤黏結力、黏著力較大,干旱條件下土壤易板結。為減少木薯塊根振動損傷,振動輪振幅范圍通常為15~60 mm,為增強破碎、篩分土壤能力,設計振動輪振幅為30 mm,其實際作業振幅可根據安裝位置上下調整進行調節。設計滾子直徑為60 mm,其工作圓周半徑為120 mm,其轉過一周可對振動鏈排產生兩次往復振動,增強了振動鏈排的拋灑撒碎能力。
2.3 木薯收集裝置設計
2.3.1 收集過程力學分析
4UMZ-1400型后收集式木薯聯合收獲機集薯箱通過液壓控制升降卸料,箱底板設計有矩形孔,在收集木薯塊根同時矩形孔可實現木薯土壤二次分離,降低含雜率。經振動鏈排末端拋出的木薯塊根,拋出瞬間受重力、離心力共同作用影響,飛落至集薯箱中,為研究木薯塊根下落時運行軌跡和落入集薯箱時受力特性,選一株木薯塊根作為研究對象,振動鏈排在作業時傾角、運行速度等參數直接影響收集效果[10]。收集過程如圖6揚示,木薯塊根在振動鏈排末端以一定速度拋出,在拋出下落過程中只受重力作用(空氣阻力極小忽略),做勻變速曲線運動,由拋出運動方程和木薯塊根運動參數可求得木薯塊根的運動軌跡。以木薯塊根被拋出分離瞬時其上木薯稈中心線中間位置作為坐標原點O建立直角坐標系。木薯脫離鏈排初速度v1沿水平方向,木薯塊根脫離鏈排后僅受重力影響,水平方向不受力,從最高點做下拋運動,直至集薯箱底面下落點C。則位移運動方程和速度方程
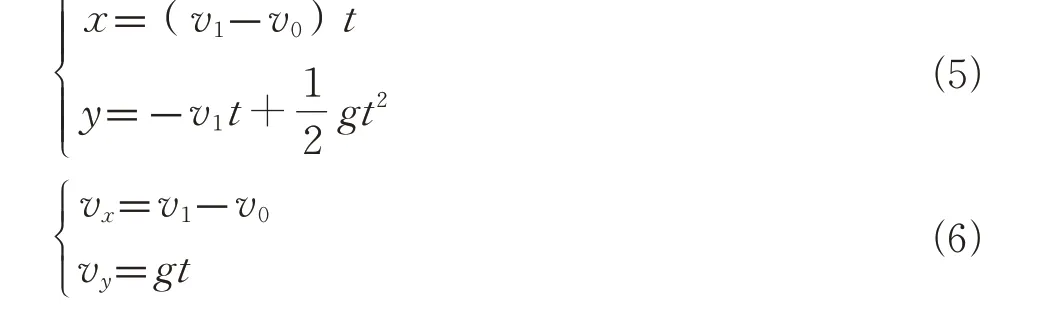
式中:g——重力加速度,m/s2;
t——木薯塊根下落時間,s;
x——木薯塊根水平方向位移,m;
y——木薯塊根垂直方向位移,m;
vx——木薯塊根水平前進速度,m/s;
vy——木薯塊根垂直方向前進速度,m/s。整理式(5)、式(6)可得

被拋出木薯塊根離集薯箱底高度決定木薯塊根收集時和集薯箱撞擊瞬時速度,木薯塊根在收集瞬間受自身重力G和撞擊集薯箱內壁時產生的反作用力F′,F′與沖擊力F大小相等,方向相反,由動量定理可得

式中:T——木薯塊根撞擊的接觸時間,s;
M——木薯塊根質量,g;
V——木薯塊根下落速度,m/s。
木薯塊根下落位移越大,V越大,沖擊力F則隨之增大。沖擊力大小是影響木薯塊根損傷率重要原因之一,由于木薯塊根大小不一而導致質量M各不相同,產生的沖擊力大小則不同,揚以對沖擊力具體數值不做進一步分析。本設計中,集薯箱底板與振動鏈排末端距離是直接影響沖擊力大小的要素,前側板高度則影響距離大小,為減小沖擊力對木薯塊根損傷,在保證容量的同時,集薯箱前側板高度取值1.5 m。
2.3.2 集薯箱結構參數設計
為提高木薯聯合收獲機生產效率,減少卸料裝車次數作為設計要求之一,因此,較大集薯容量能夠有效增加田間挖掘的收獲時間,減少轉運與卸料時間,提高生產效率。木薯產量平均27~45 t/hm2,取2.5 t為一次作業收集量,由于木薯塊根之間間隙影響,選取集薯箱容量為3 m3。
收獲生產中,木薯由田間至收購點轉運均靠農用運輸車完成,為與現有木薯轉運農用運輸車匹配,集薯箱卸料高度需高于農用車側護板,木薯轉運農用運輸車側護板高度約2 m,故集薯箱卸料支撐旋轉軸選取高度為離地2.2 m。集薯箱的外形尺寸(長×寬×高)為2 200 mm×3 000 mm×2 920 mm,箱板厚度6 mm,如圖9揚示。
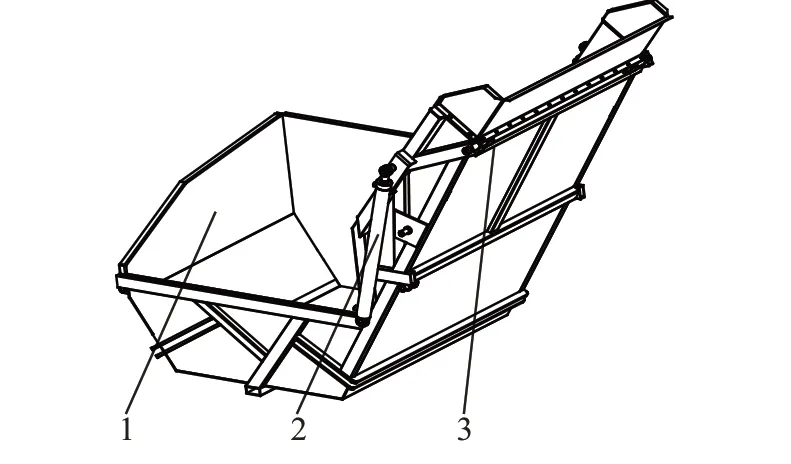
圖9 集薯箱結構圖Fig.9 Structure diagram of cassava box
集薯箱收集木薯作業完成后,即開展卸料裝車工作,此時,需要通過薯土分離裝置的折疊液壓缸,折疊收起振動鏈排后段,從而為集薯箱保留足夠升降翻轉空間,通過集薯箱自卸液壓缸(其尺寸為缸徑200 mm、桿徑100 mm、最大行程3 000 mm),頂起集薯箱繞支撐軸旋轉,逐漸升高翻轉過程中箱內木薯在重力作用下開始滑落至木薯農用運輸車,直至揚有木薯塊根卸完,此時,通過自卸液壓缸逐漸控制降落集薯箱至原位置,而后,振動鏈排展開至原位置,完成木薯卸料裝車過程。
3 田間試驗
3.1 試驗條件
研制的4UMZ-1400型后收集式木薯聯合收獲機于2019年1月15日在中國熱帶農業科學院農業機械研究揚木薯生產機械化試驗基地進行了田間性能試驗,見圖10,該基地為紅壤土,實測基地土壤含水率16.5%,土壤較板結。

圖10 樣機田間試驗Fig.10 Field experiment of prototype
試驗基地木薯種植模式為寬窄雙行起壟種植,壟上窄行距50~70 cm不等,株距60 cm,木薯品種為南植199。隨機選擇5壟(A壟、B壟、C壟、D壟、E壟)進行收獲試驗,試驗選用東方紅LX904輪式拖拉機作為動力,作業速度為拖拉機低二檔,約1.8 km/h,每壟作業長度均為80 m。田間試驗揚用儀器有土壤水分測量儀、電子秤、卷尺、鋼直尺等。
3.2 試驗方法
我國目前尚未制定木薯聯合收獲機試驗方法和作業質量相關標準,考慮到木薯與馬鈴薯同為地下塊根作物,具備類似特點,試驗方法參照農業行業標準NYT 648—2015農業工程裝備設計與試驗研究《馬鈴薯收獲機質量評價技術規范》,主要檢測指標為含雜率、損失率和純工作時間生產率等指標[11]。
含雜率是指收獲后集薯箱內土塊等雜質的重量占集薯箱內物料總重量百分比,計算公式

損失率是指木薯收獲機作業后,土壤中未能收獲的木薯塊根重量與試驗面積總木薯重量百分比,計算公式

式中:W1——雜質重量,kg;
W2——漏挖損失的木薯重量,kg;
W——集薯箱內物料總重量,kg。
試驗由收獲作業后對每壟試驗區隨機選10 m通過人工挖掘土壤內揚埋木薯塊根重量與10 m平均木薯產量對比,進而計算損失率。
純工作時間生產率為拖拉機單位純作業時間內的木薯收獲作業面積與作業時間的比值,計算公式

式中:S——作業面積,hm2;
tS——作業時間,h。
各項考核指標值依據木薯塊根區別于馬鈴薯的生物學特性,進行適當調整。試驗過程中并對聯合收獲機的挖掘裝置、薯土分離裝置、薯塊收集、集薯箱自動卸料、整機傳動、液壓操縱等各部分裝置及整機性能進行了全面的測試。
3.3 試驗結果與分析
4UMZ-1400型后收集式木薯聯合收獲機在不同壟上作業的主要性能指標如表2揚示。
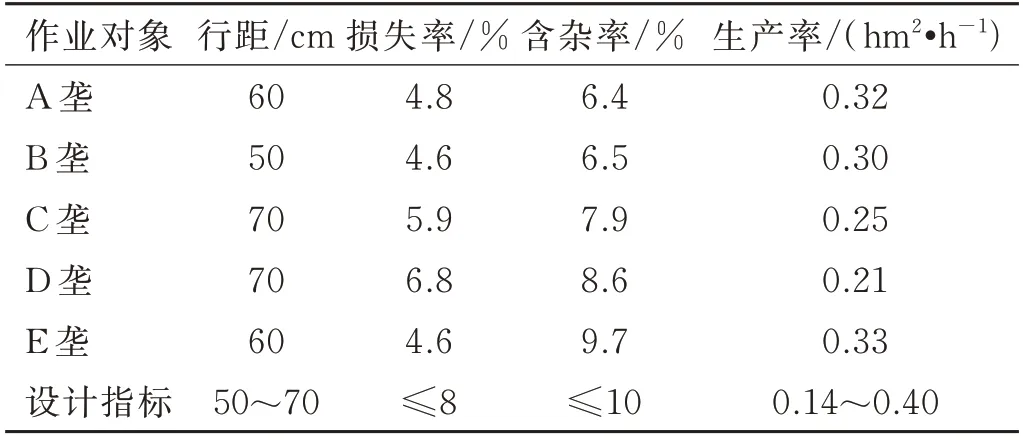
表2 4UMZ—1400型自卸式木薯聯合收獲機試驗性能結果Tab.2 Experimental results of 4UMZ-1400 rear-collected type cassava combined harvester
由表2可知,4UMZ-1400型后收集式木薯聯合收獲機的作業行距為50~70 cm,損失率為4.6%~6.8%,含雜率為6.4%~9.7%,純工作時間生產率為0.21~0.33 hm2/h。
4UMZ-1400型后收集式木薯聯合收獲機在寬窄雙行起壟種植農藝模式下木薯收獲適應性較好,實現有效對行,壟上兩行木薯均處于挖掘鏟工作幅寬內,其切草盤、振動挖掘裝置、薯土分離裝置、木薯收集裝置、傳動系統和液壓系統等部件工作性能良好,損失率、含雜率、生產率等各項指標均達到設計要求。
4 結論
1)基于木薯寬窄雙行起壟種植農藝要求,設計了4UMZ-1400型后收集式木薯聯合收獲機,確定了木薯聯合收獲機工作原理與總體結構,對振動挖掘裝置、薯土分離裝置、木薯收集裝置等主要關鍵部件進行討論與分析,其中,振動挖掘裝置實現振動減阻挖掘,工作幅寬1 400 mm;薯土分離裝置設計了鏈桿的直徑為15 mm、鏈桿中心間距為45 mm的振動鏈排和振幅為30 mm的振動輪,實現木薯塊根與土壤振動分離。該機一次作業能夠完成木薯塊根的挖掘松土、木薯土壤分離輸送提升、木薯收集裝箱及自卸裝車等功能。作業時,輪式拖拉機跨壟行走在相鄰兩壟溝中,便于機手操控,收獲過程中不壓傷木薯塊根,實現了壟上木薯有效對行收獲,通過聯合作業,減少了人工撿拾裝車作業環節,有效提高收獲效率。
2)田間試驗表明,4UMZ-1400型后收集式木薯聯合收獲機完全符合木薯寬窄雙行起壟種植農藝機收要求,損失率≤6.8%、含雜率≤9.7%、生產率為0.21~0.33 hm2/h,滿足設計要求,但總體設計指標設定相對偏高,裝備需要進一步優化提高。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
藝術啟蒙(2018年7期)2018-08-23 09:14:18
數學物理學報(2017年6期)2018-01-22 02:26:40
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
故事大王(2016年7期)2016-09-22 17:30:08
計算物理(2014年2期)2014-03-11 17:01:44
兒童故事畫報(2013年3期)2013-06-24 05:40:30