基于Φ-OTDR 系統事件的快速定位方法
2022-04-13 11:44:38孟金昌
電子設計工程 2022年6期
孟金昌
(武漢郵電科學研究院,湖北 武漢 430000)
近年來,相敏光時域反射儀(Φ-OTDR)因其具有完全分布式振動傳感器的能力而備受關注[1-3]。Φ-OTDR 系統通常將高度相干的探測器光脈沖發射到傳感光纖中,并接收后向散射光,以通過相干檢測技術監視沿傳感光纖的外部振動干擾[4-6]。與傳統的OTDR 不同,傳統的OTDR 僅監視沿光纖的背向散射光的變化,而Φ-OTDR 系統可檢測背向散射光的相位變化[7-8]。通過提取相位變化,可以利用Φ-OTDR技術提供外部振動源類型的信息。因此,基于ΦOTDR的分布式傳感器有望實現廣泛的應用,如沿油氣管道的異常振動檢測、入侵報警和定位系統以及用于火車跟蹤的分布式聲學測試[9-12]。
為了在Φ-OTDR 系統中沿著傳感光纖精確定位外部振動,已經提出并探索了基于幅度的定位技術和基于相位的定位技術,包括移動平均、小波變換、二維雙邊濾波算法、微分相位方法等[13-15]。基于幅度的定位技術,主要優點是可以通過平均方法來抑制信號衰落引起的定位錯誤警報[16]。然而,大多數基于幅度的定位方法都需要相對復雜的算法來逐點處理所有獲取的感測數據[6-7]計算成本高。對于基于相位的定位技術,其優點是用于定位外部振動的信噪比(SNR)相對較高,可以達到10 dB。然而,由于信號衰落,Φ-OTDR 系統中不可避免地存在大量的虛警相位峰值,這導致了辨別此類虛警相位峰值的大量計算成本。
文中提出了一種快速定位方法,以提高ΦOTDR 系統定位外部振動事件的效率。由于外部振動會在振動區域之外感應出一個附加相位,而信號衰落對其位置之外的相位影響很小,因此可以先將背向散射的數據分為幾個相距很遠的段,進行預處理。沿光纖的與外部振動無關的批次傳感點被排除在外。其次,使用相位解調進行定位,在包含外部振動的目標段內實現精準定位。由于大多數無關且提供冗余信息的傳感點都被丟棄,該方法能顯著降低信號處理負荷,尤其是對于長距離傳感光纖。此外,結果表明計算成本對感測范圍不敏感。
1 Φ-OTDR系統相位解調原理
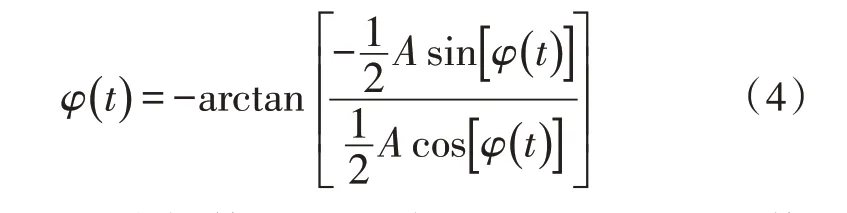
在使用相干探測的Φ-OTDR 中,IQ 解調因其簡單并容易應用的原理而被廣泛應用,具體的解調算法流程圖如圖1 所示。

圖1 IQ解調算法流程圖
IQ 解調主要有混頻、濾波、解調3 部分。假設原始信號的形式如式(1)所示:

其中,A指信號幅值,φ(t)指干擾信號的相位,ω為AOM 引入的調制頻率。
首先對采集到的原始信號進行混頻,一路信號是同相信號I,另一路是與之正交的信號Q,S(t)分別與正弦和余弦函數相乘以后便可以得到φ(t)的分量,以及使用AOM 調制的光頻ω的二倍頻分量,I、Q可以用式(2)和式(3)表示:
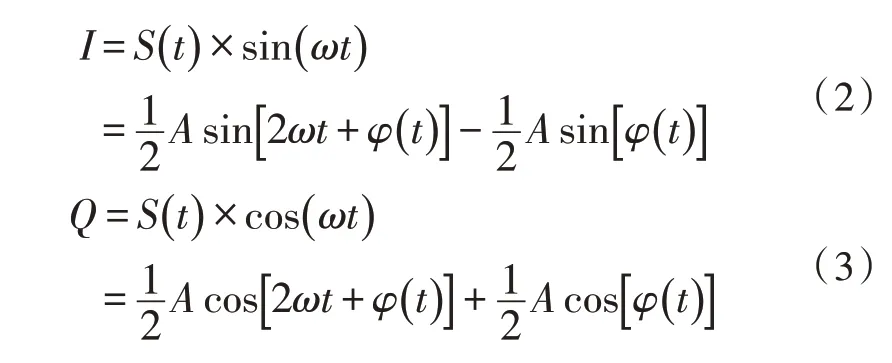
利用低通濾波器消除其中的倍頻分量,這使得濾波后的信號只保留了外界振動事件的φ(t)信息,得到的相互正交的信號進行反正切運算,即可初步得到振動事件的相位,如式(4)所示:
再經過解纏繞算法對相位中的突變點進行修正,即可將其真實相位解調出來。
2 Φ-OTDR系統快速定位原理
定位方法中仍然采用傳統Φ-OTDR 光纖傳感系統,方法流程如圖2 所示。
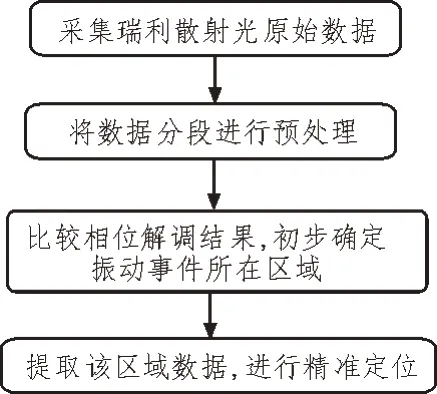
圖2 快速定位方法流程
首先,構建信號的數據矩陣,在采集數據時構建數字信號矩陣A=[Ai,j],其中Ai,j表示Φ-OTDR 傳感系統的數據采集卡采集到的信息,具體來說,指的是第i個光脈沖到達傳感光纖第j個數據點時的瑞利散射光的數字信號值,矩陣的行向量是單個光脈沖對應的數字信號,在Φ-OTDR 系統中,傳感光被調制為多個連續的光脈沖信號,按發射的時間順序依次將其對應的數字信號作為第1 行、第2 行……第M行,這里M代表了光脈沖個數,矩陣的列向量N代表了單個脈沖采集到的信號數據長度。
其次,在數字信號矩陣A上每隔一定光纖傳感長度L取一次測試窗口WK,確保測試窗口WK的寬度l遠小于L;結合相位解調算法解調這一測試窗口WK的相位信息,將其中某一列的相位數據作為測試列相位φk,其位置用jk表示;對每條測試列相位進行相位解卷繞,把相位變化拓展到整個實數范圍。
再次,定位擾動區間的粗略位置,具體操作方法是按順序比較所述相鄰測試列相位,若相鄰列相位φk和φk+1相等,即φk=φk+1,則可以判定區間(jk,jk+1)無擾動;若相鄰測試窗口測試列相位φk和φk+1不相等,即φk≠φk+1,那么判定該區間(jk,jk+1)存在擾動。
最后,精確定位擾動位置,當系統判定某區間(jk,jk+1)存在擾動時,對該區間范圍內的所有光數字信號進行相位解調,結合前文所述的差分補償算法對擾動信號進行精確的定位和還原。
3 實驗結果及分析
3.1 實驗測試結果
為了模擬外部振動源,在傳感光纖的2.58 km 處施加由80 Hz 正弦電壓信號驅動的壓電換能器(PZT),在傳感光纖某一位置處使用函數發生器產生正弦信號來模擬外界振動事件。
當所述的傳感光纖上的某一點受到振動信號的干擾時,由光的彈光效應可知,光脈沖在經過該擾動點時將引入一個附加相移?φ,且附加相移量受外界擾動調制。光脈沖將攜帶該附加相移?φ繼續在光纖中傳播,傳播過程中產生相位和光脈沖相位相同的瑞利散射光,因此,在擾動點后所產生的瑞利散射光經過擾動點時相位均將再附加?φ,且該附加相移僅由擾動造成,信號衰落噪聲和無擾動的情況則不會引入該附加相移。基于這一原理,僅僅根據相鄰測試窗口中對應的測試列相位的相似程度以及這兩個測試列相位發生的能量變化即可確定該區段是否發生了擾動,即若相鄰測試窗口之間無擾動,兩測試列相位相同;若相鄰測試窗口之間存在擾動,兩測試列相位不同。
為了識別粗略定位的觀測點之間的相位差,采用自相關算法的判據。皮爾遜相關系數r通常用于測量離散隨機信號的線性關系,表示為式(5):

其中,X和Y表示要比較的隨機信號,-X和-Y分別表示X和Y的期望,k表示離散信號中的值的索引號。由于r的范圍為[-1,1],強相關使r接近1,因此信號之間的高度相似性會導致r值較大。為了突出粗略定位過程中相鄰觀測點之間的相似性,將相關系數si定義為式(6):

其中,φi表示第i個觀察點的相位。如果φi與φi-1不同,則si相對較高,并且將第i段視為與振動相關的段。
首先,將整個傳感光纖劃分為100個間隔為100 m的段和101 個觀測點,以實行粗細定位方案。注意,在實驗中,需要在每個段的末尾有一個觀測窗,以從指定的觀測點解調相位。通過使用式(5)和(6),計算相鄰觀測點的相關系數,預處理后的初步定位結果如圖3 所示。峰值表明外部振動發生在第25 段內,該段對應于2.4 km和2.5 km 之間的間隔。從連續端點24(2.4 km),25(2.5 km)和26(2.6 km)提取解調后的時間相位。發現??25和??26 幾乎相同,但與??24 不同。同時,通過從相鄰觀測點中減去時間相位(??25=?25-?24,??26=?26-?25),獲得時間相位差分布(??)。相位差??25 呈現與施加的PZT 振動相匹配的正弦信號,而相位差??26趨于零。非零差異表明傳感光纖在第25 段內受到干擾,相關系數中的SNR 粗略定位約為44.55 dB。SNR 計算公式如式(7)所示:
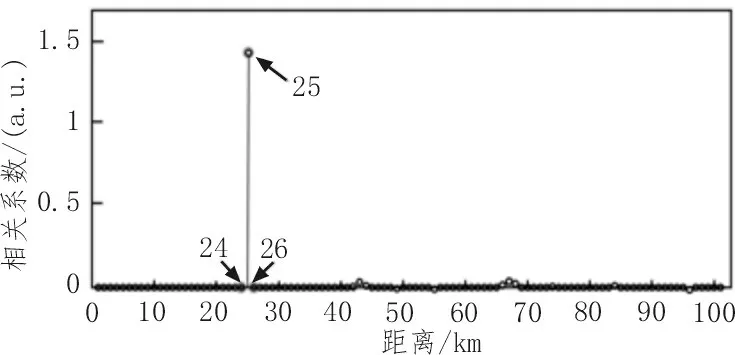
圖3 預處理后的相關系數分布圖

其中,As指信號的幅值,An是背景噪聲的均方根。根據上述預處理過程,可以丟棄大部分無干擾的部分。
接著在目標段上進行精確定位以實現準確的振動位置,此時僅需要解調100 m的傳感光纖。為了避免信號衰落引起的虛警相位峰值,采用前文所述的相位解調方法來確定振動的位置,如圖4 所示,由于振動點位于2.58 km 處,故空間分辨率約為5 m。

圖4 精確定位所得的相位方差
3.2 實驗結果分析
進一步研究了外差相干Φ-OTDR 系統中定位信號處理的總體計算成本。計算成本取決于信號的復雜程度,是影響傳感系統響應速度的主要因素。由于每個觀測點都經過相同的解調,因此計算成本取決于觀測點的數量。此處,用于直接定位(一個接一個地處理每個觀測點)的計算成本Cd可以表示為式(8):

其中,q表示每單位長度的觀測點數量,L表示整個感應范圍的長度。所提出的由粗到細的定位方法的計算成本Cr-f可用式(9)來表達:

其中,Lseg表示用于粗定位的片段的長度,n表示目標片段的數量。運算符表示舍入運算,w表示每個片段的觀察窗長度。在該實驗中,q為2.5 個/m,DAQ 采樣率為1 GS/s,Lseg為100 m。為了實現快速定位,觀察窗的長度w應該盡可能小。同時,為了保證粗定位的可靠性,觀察窗中包含的觀測點應避免在信號衰落或振動位置選擇觀察點。在這里,w被優化為20 m,覆蓋50 個觀測點。由于同時發生衰落的觀測點數量的可能性較低,因此有可能獲得一個被選作端點的觀測點,該觀測點在20 m的窗口內不發生衰落。而且,選擇這樣的觀測點,使其與相鄰觀測點之間的相位差最小,以避免發生振動事件。
這種計算成本比直接定位的計算成本小得多。隨著傳感光纖長度的增加,使用粗細定位法的計算成本逐漸增加。但與直接定位過程相比,粗細定位方法相對于長度增加的感應范圍不敏感,因為通過粗定位過程排除了大多數感應點,這樣僅消耗了少量計算量。而且,由于所提出的粗細定位方法是基于軟件算法而非硬件布置的解決方案,它顯示了與眾多相干Φ-OTDR的兼容性,因此,它也適用于模擬外差解調方案和基于FPGA的實時定位方案,以進一步降低遠程Φ-OTDR 系統的總計算成本。
預處理定位的SNR 隨分段長度的增加而降低。由于激光源引起的相位噪聲會隨著距離的增加而累積,因此長度不能太大。應通過考慮實際應用中所需的響應速度和穩定性來優化段長度。此外,應該討論所提出的粗定位方法的潛在局限性。對于因溫度波動而引起的相變在整個段中變得顯著的情況,公式中定義了相關系數。即使沒有外部振動也顯示在零以上。但是,當振動引起的峰值大于可能由于溫度變化而引起的噪聲背景時,仍然可以找出振動。為了使來自溫度串擾的影響最小化,應根據各種實際應用來考慮優化的相關系數閾值。在粗略定位過程中還應考慮另一個問題,如果振動源作用在一個段內的傳感光纖上,可能會遇到這樣的情況:由于沿光纖壓縮段和擴展段的大小相似,例如,兩個振幅相似的振動源,后向散射光的相變被抵消了。對于這種特殊情況,粗定位過程有一定的局限性。不過,在實踐中,外部振動擾動通常在振動譜中具有一定的帶寬,很少同時消除由多個頻率引起的相位變化。因此,提出的快速定位方法可以滿足大多數實際需求。
4 結論
為了解決Φ-OTDR 光纖傳感系統數據量龐大,運算困難的問題,提出了一種針對光纖傳感系統的快速定位方法,解決了相干探測Φ-OTDR 光纖傳感系統解調運算量大的難題,且該方法是一種軟件算法,簡單易行,適用性強,幾乎可以直接應用在所有的相干探測Φ-OTDR 系統。
該方法摒棄了以往的逐個對傳感信息點進行解調直接定位的方法,將定位過程分為兩個步驟:預處理和精確定位,經過預處理后,排除了大多數無價值的觀測點,但保留了一些與干擾信號直接相關的觀測點,因此,可以大大降低用于定位的計算成本。系統能夠實現的擾動位置粗略定位信噪比可達40 dB以上,在精確定位后,實現的空間分辨率為5 m。通過使用所述的快速定位方法,排除大量無效傳感點,僅對存在擾動信息的這部分傳感點進行解調和分析,極大地降低了系統的運算負擔,提高了系統的實時性。所提方法可以在如火車跟蹤、電網監測、分布式傳感系統等實時性要求很高的場景下得到充分利用。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
