某型導彈三自由度陀螺典型故障分析
2022-04-15 16:03:32秦燕鴿郭曉華劉杰付強
航空維修與工程 2022年2期
秦燕鴿 郭曉華 劉杰 付強
摘要:某型導彈在外場測試時“允許截獲、截獲、角度預置誤差Y和Z軸絕對值”不合格,返廠測試故障現象與外場測試一致。為了解決該問題,通過故障分析和機理分析,確定故障原因是三自由度陀螺電機堵轉無法正常啟動,導致導引頭穩定平臺系統無法正常工作。本文可為排除同此類故障提供借鑒。
關鍵詞:三自由度陀螺;故障分析;電機堵轉
Keywords:unrestrained gyroscope;fault analysis;motor locked rotor
1 故障描述
某型導彈外場測試時“允許截獲、截獲、角度預置誤差Y和Z軸絕對值”不合格,該導彈入廠測試時,故障現象與外場測試結果一致。
2 問題定位
2.1 全彈故障分析
根據全時序測試流程,對“允許截獲、截獲、角度預置誤差Y和Z軸絕對值”不合格的故障現象進行分析。
該枚產品故障產生的時機是在中/末制導交接段,當目標將要進入導引頭的允許截獲距離時,飛控組件向導引頭發出“開發射機高壓指令”,并給導引頭以目標角度和速度指示。在角度預置時,飛控組件向導引頭發送Y、Z軸框架預置角,導引頭接收到加高壓指令時,會根據預置信息執行角度粗預定和精預定。粗預定時,導引頭不接入陀螺;精預定時,導引頭按照陀螺指向進行精確的角度指示。
全彈自檢合格后,在預置框架角時,角度預置不合格。根據以上分析,造成不合格的原因應為導引頭艙故障。
2.2 導引頭艙故障分析
分解后對導引頭艙進行測試,發現導引頭艙內部有異響,角度指示執行誤差測試不合格,加溫電沖擊電流變化異常。
根據導引頭工作時序分析,在中/末制導交接段,根據飛控組件向導引頭傳送目標的角度和速度指示信息對角度和速度進行預置,預置滿足要求后,飛控根據允許截獲距離和導引頭加高壓指令持續時間給出允許截獲指令。導引頭角度執行誤差測試即是檢測導引頭在中/末制導交接段角度預置執行能力的性能。
角度預定時,彈載計算機給出目標粗指示信號估值與角位置測量值的比較,將其差值送到功率放大器,驅動伺服電機轉動天線實現粗略目標指示。同時,彈載計算機給出目標精指示信號估值,通過直流放大器使陀螺產生進動,從而使陀螺角傳感器產生一幅度正比于轉角大小的信號,信號經功率放大器控制驅動電機帶動天線轉動,實現精確目標指示。
根據以上分析,造成不合格的原因應為導引頭角度跟蹤回路故障。
2.3 故障樹建立及分析
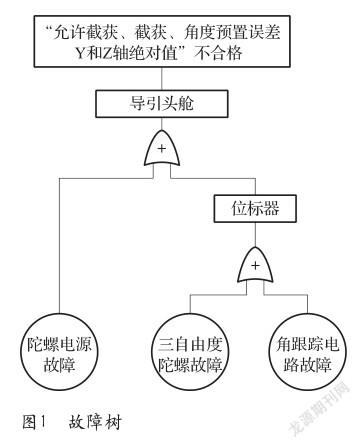
為了查明故障原因,結合部隊和工廠測試結果,建立導彈“允許截獲、截獲、角度預置誤差Y和Z軸絕對值”不合格故障樹(見圖1)。由圖1可知,導彈測試出現該故障與3個底事件有關。根據故障樹對底事件進行排查。
1)角跟蹤電路故障
針對角度跟蹤回路工作異常,結合該導引頭艙加溫電沖擊電流變化異常,對位標器及角跟蹤電路進行排查。從設備來的加溫電源一路送到發射機,為發射機速調管提供加溫電;另一路經過二次電源兩個二極管后,分別送到修正通道微波接收機和陀螺電源,為多路恒溫晶振提供加溫電,經陀螺電源轉化為三相交流電加至三自由度陀螺,驅動陀螺轉動。在導彈加溫階段,位標器除了三自由度陀螺外其他部件不工作,故角跟蹤電路不工作。因此,該底事件可以排除。
2)陀螺電源故障
用數字示波器對陀螺電源對外接口 3、4、5腳A、B、C三相輸出電壓波形進行測試,A、B、C三相輸出相電壓、波形均正常,測試結果為合格。因此,該底事件可以排除。
3)三自由度陀螺故障
對分解后的導引頭通電測試,加溫電接通時三自由度陀螺未啟動,用數字示波器對該導引頭的三自由度陀螺對外接口1、2、3腳A、B、C三相輸入電壓進行測試,供電正常,根據三自由度陀螺未啟動的情況判斷三自由度陀螺故障。
2.4 排查結果
根據對故障樹底事件的分析和驗證結果,得出以下結論:在導致“允許截獲、截獲、角度預置誤差Y和Z軸絕對值”不合格頂事件的3項底事件中,角跟蹤電路故障和陀螺電源故障經分析和驗證后可以排除,三自由度陀螺故障底事件不能排除,由此確定導致該故障的原因為三自由度陀螺故障。
3 機理分析
3.1 三自由度陀螺結構組成
三自由度陀螺屬于小型轉子陀螺,由陀螺殼體、陀螺電機、雙軸力矩發生器、雙軸角度傳感器、內外環架五部分組成。內外環架用于確保陀螺角動量相對于內環軸和外環軸的自由度,陀螺電機用一對軸承支撐在內環上,內環用一對軸承支撐在外環上,外環用一對軸承支撐在陀螺殼體上。內環軸和外環軸的兩側分別裝有內環、外環角傳感器、內環、外環力矩發生器。
3.2 三自由度陀螺功能原理
三自由度陀螺的基本特性是定軸性和進動性。定軸性是指具有抵抗干擾力矩,即保持其自轉軸相對慣性空間方位穩定的特性;進動性是指陀螺儀在外力矩作用下繞著與外力矩垂直的方向轉動的特性。
三自由度陀螺內環平面與外環平面保持一致時,內環軸和外環軸的角傳感器輸出為零。當導彈彈體相對于外環軸產生擾動角速度時,平臺將繞外環軸轉動,平臺內環與平臺外環之間形成失調角,外環軸角傳感器輸出與失調角成正比的電信號,通過放大后驅動陀螺電機,并以同樣大小角度轉動平臺向反方向旋轉,使平臺恢復到原先位置,確保平臺對外環軸的穩定。內環軸的穩定原理與外環軸相同。
當目標視線存在一個角速度時,天線坐標相對于目標坐標出現失調角,經過接收機形成失調信號,通過外環軸力矩發生器產生陀螺力矩,使陀螺平臺繞外環軸進動,進動時陀螺外環軸角傳感器輸出信號,信號經放大后驅動外環軸使陀螺電機轉動,驅動平臺跟上陀螺的進動,從而實現對目標的跟蹤。
3.3 三自由度陀螺故障機理分析
對三自由度陀螺進行失效分析,判定該故障是因電機下軸承保持架分層、掉塊斷裂造成的。
1)電氣接口檢測
對故障的三自由度陀螺各接線柱間阻值進行測試,結果均合格;對故障的三自由度陀螺各接線柱對殼體的絕緣電阻進行測試,結果均合格;對故障的三自由度陀螺各接線柱間的絕緣電阻進行測試,結果均合格。
2)通電檢查
對三自由度陀螺進行通電測試,沖擊電流變化異常,立即斷電。測試情況表明該陀螺在常溫通電情況下電機堵轉,故障現象與整機測試時故障現象一致,故障復現。
3)原因分析
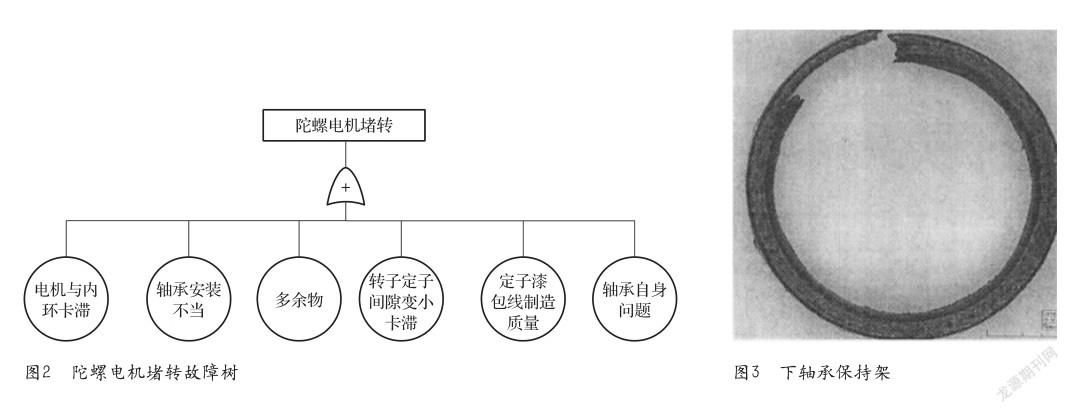
針對陀螺電機堵轉問題,對三自由度陀螺從外向內進行逐層分解排查。結合三自由度陀螺結構及工作原理,列出造成電機堵轉的故障樹(見圖2)。由圖2可知,造成陀螺電機堵轉的原因有6項底事件,結合三自由度陀螺分解情況對故障樹底事件逐一進行分析、排查、定位。
a.電機與內環卡滯
在分解過程中,分解到內環組件時,從內環組件中取出電機,在16倍體視顯微鏡下檢查,內環表面與電機表面無卡碰、劃痕。因此,該底事件可以排除。
b. 軸承安裝不當
按照工藝要求對故障件軸向位移復測合格。復查三自由度陀螺電機軸向位移測試夾具合格有效,每年定期校準,復查原始質量卡數據軸承與定子、端蓋的配合以及軸向位移值均合格。因此,該底事件可以排除。
c. 多余物
在對三自由度陀螺的分解過程中,每一步的分解均無多余物。因此,該底事件可以排除。
d. 轉子、定子間隙變小卡滯
通過對陀螺電機的分解,在分解過程中定轉子無粘連,無摩擦痕跡,定子與轉子之間存在一定的間隙,說明定子與轉子之間無卡滯。因此,該底事件可以排除。
e. 定子漆包線制造質量
通過對定子繞組的生產工藝過程進行復查,每個工序都設置檢驗工序,合格受控,對電機定子組件阻值測試合格,說明該定子漆包線制造質量無問題。因此,該底事件可以排除。
f. 軸承自身問題
該軸承是分離式軸承,分別由內圈、外圈、保持架及滾珠組成,檢查上下軸承保持架、內外圈及鋼球,發現上軸承保持架及內、外圈、鋼球均正常,下軸承保持架分層、掉塊開裂(見圖3);下軸承內、外圈均不同程度地粘有軸承保持架磨損的粉末。鋼球無異常。
通過對陀螺進行分解排查,發現該陀螺電機下軸承保持架分層、掉塊開裂,其余無異常。
4)三自由度陀螺故障機理分析
根據故障分析報告可知,在對三自由度陀螺進行通電時,沖擊電流變化異常,說明該三自由度陀螺在常溫通電情況下電機堵轉,與在工廠內導引頭艙整機測試故障現象一致,經逐層分解排查得出,故障是由于電機下軸承保持架分層、掉塊斷裂造成的。
該三自由度陀螺軸承是分離式軸承,分別由內圈、外圈、保持架及滾珠組成,經檢查,該陀螺下軸承保持架分層、掉塊斷裂的原因是下軸承保持架自身存在質量問題,先斷裂后產生高溫。由于軸承保持架存在一定缺陷,軸承在高速運轉時,軸承保持架發生開裂、分層掉塊,阻礙滾珠轉動,進而引起軸承摩擦力增大,使電機轉子受到異常阻力。同時,斷裂后的保持架在離心力的作用下膨脹,與軸承外圈相摩擦,在干摩擦過程中產生粉末進入滾道,從而造成卡滯,使電機堵轉。
4 糾正措施及驗證
經過分析確認,全彈測試“允許截獲、截獲、角度預置誤差Y和Z軸絕對值”不合格的主要原因為三自由度陀螺故障。在對導引頭艙進行測試時,導引頭內部有異響,角度指示執行誤差測試不合格,故障現象與整彈測試現象一致。
綜合以上分析,為修復該枚產品,導引頭更換三自由度陀螺,更換后各項參數測試合格,全彈測試合格。該產品在修理中故障定位準確、采取措施有效,滿足“定位準確、機理清楚、問題復現、措施有效、舉一反三”技術五歸零要求。
參考文獻
[1]王起飛. 基于三自由度陀螺儀的導引頭天線隨動系統[J].航空兵器,1999(6).
