基于北斗三號導航系統(tǒng)的衛(wèi)星定位技術
2022-04-20 09:49:34趙鵬飛陳高峰李小娟汪大寶劉寧王慧聰
中國空間科學技術 2022年2期
關鍵詞:信號
趙鵬飛,陳高峰,李小娟,汪大寶,劉寧,王慧聰
1. 中國空間技術研究院 遙感衛(wèi)星總體部,北京 100094
2. 航天恒星科技有限公司,天津 300450
1 引言
全球導航衛(wèi)星系統(tǒng)(global navigation satellite system, GNSS)是能在地球表面或近地空間為用戶提供全天候的三維坐標、速度和時間信息(PVT)的天基無線電導航定位系統(tǒng)[1]。目前全世界主要有4大提供全球定位服務的導航衛(wèi)星系統(tǒng),分別為美國的全球定位系統(tǒng)(global navigation system,GPS),歐洲的“伽利略”(Galileo)系統(tǒng),俄羅斯的“格洛納斯”(GLONASS)系統(tǒng),以及中國的北斗三號(BD-3)系統(tǒng)。
北斗衛(wèi)星導航定位系統(tǒng)(Compass/BeiDou navigation satellite system)基本空間星座由3顆GEO衛(wèi)星、3顆IGSO衛(wèi)星和24顆MEO衛(wèi)星組成,實現了全球組網,可以為全球提供導航定位服務[2]。
美國的GPS是目前應用最廣的導航系統(tǒng)[3],共有24顆導航衛(wèi)星組成,分布在6個軌道上。GPS基于信號到達時間測距(time-of-arrival ranging)原理為海、陸、空用戶及衛(wèi)星主動段、在軌段、回收段等提供定位服務,可以為全球用戶提供24 h不間斷定位服務,定位精度達到10 m[4-5]。但目前GPS也面臨著易被干擾等挑戰(zhàn)[6]。
經過地面跟蹤站對BD-3導航定位服務性能的評估[7-11],BD-3導航系統(tǒng)可以提供定位精度10 m,與GPS精度相當[12-15]。
但是目前還未有基于BD-3導航系統(tǒng)實現航天飛行器定位的詳細研究。BD-3導航系統(tǒng)部署完成后,也未有實際在軌測試數據對基于BD-3系統(tǒng)的定位功能、性能給出評價。
本文首先從BD-3信號鏈路分析出發(fā),得出低軌太陽同步軌道衛(wèi)星接收到的BD-3導航信號功率;之后,對導航信號捕獲算法中的關鍵參數——非相干累加次數進行分析,獲得該參數與接收靈敏度的關系,并據此仿真了捕獲概率,得出最佳的非相干累加次數為4。進一步,以低軌太陽同步軌道衛(wèi)星為例,仿真了軌道周期內的收星數和定位精度。最后,首次完成在軌實測,試驗衛(wèi)星使用BD-3系統(tǒng)實現了衛(wèi)星定位功能,并將定位精度等性能指標與仿真結果對比,一致性良好。本文的研究成果可以作為使用BD-3導航系統(tǒng)進行定位的設計參考。
2 BD-3信號理論接收功率分析
來自BD-3導航星座的導航信號滿足以下鏈路功率方程:
PR=PT+GT+GR+Lbf+LA+Lline
式中:PR為星載接收機所接收到的信號功率;PT為BD-3導航衛(wèi)星的信號發(fā)射功率;GT為導航衛(wèi)星在信號傳播方向上的輻射增益;GR是星載接收機天線的增益;LA為大氣損耗;Lline為接收天線到接收機間傳輸線的損耗;Lbf為信號在空間中的自由傳播損耗,
式中:d為信號傳播的距離;λ為導航信號空間波長。
由BD-3系統(tǒng)空間信號接口控制文件(ICD)可知,PT(MEO)=29 dBW,PT(IGSO)=31 dBW,GT=0 dBi。
(1)信號在空間中的自由傳播損耗(Lbf)
為保證計算結果可靠性,以可能存在的最差工況,即最長傳輸鏈路計算傳播損耗。BD-3衛(wèi)星中,MEO導航星軌道高度為21 528 km,IGSO導航星軌道高度為35 786 km。以低軌太陽同步軌道衛(wèi)星為例,其軌道近地點高度設為250 km。地球半徑取6 371 km。按照接收±70°立體角空域導航信號考慮,當導航星剛進入接收空域時距離最長。通過簡單的三角函數計算即可得知,對應的MEO衛(wèi)星導航信號的傳播距離d(MEO)為24 932 km,IGSO衛(wèi)星導航信號的傳播距離d(IGSO)為39 431 km。經過計算,到達接收機信號的自由空間傳播損耗為:
Lbf(MEO)=181.70 dB,Lbf(IGSO)=185.68 dB
(2)信號在地球大氣中的傳播損耗
對于用戶衛(wèi)星上的接收機接收天線,在信號斜向或接近垂直穿過大氣層的過程中大氣的損耗LA比較小,約為0.5~1 dB。此處大氣損耗取值為1 dB。
(3)接收機天線增益
為提高衛(wèi)星接收BD-3導航信號的穩(wěn)定性和可靠性,采用波束寬度覆蓋±70°立體角,相位中心具有高穩(wěn)定度的微帶天線,波束寬度內最低增益值為GR=-3.45 dBi。此外,從接收天線至導航接收機間還有一段高頻電纜,在BD-3系統(tǒng)B2a頻點的插損為Lline=0.29 dB。
用戶星導航接收機入口端信號功率計算如表 1所示。
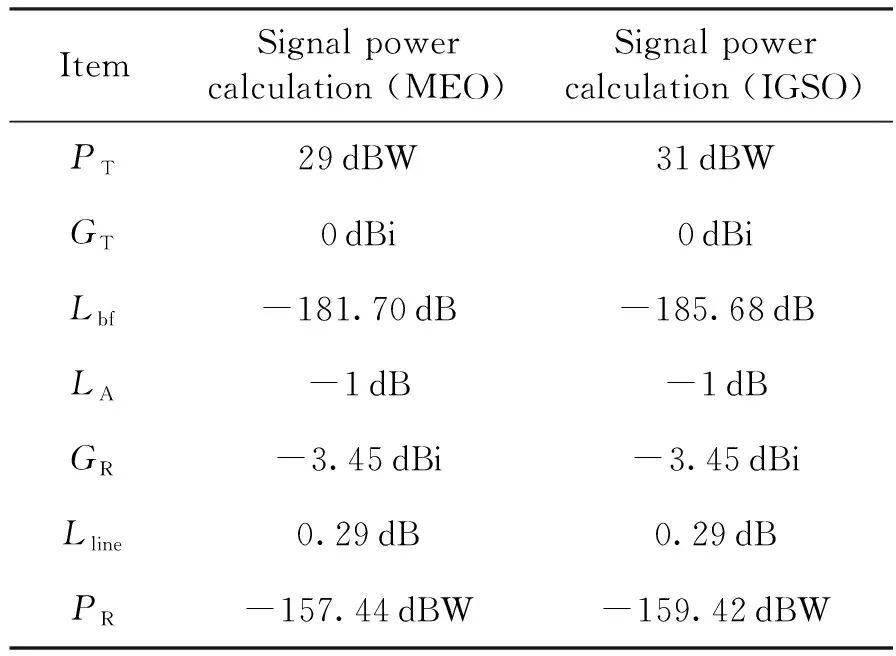
表1 BD-3系統(tǒng)B2a頻點信號功率計算
由表1的理論計算可知,BD-3導航衛(wèi)星中MEO衛(wèi)星到達接收機輸入口信號功率最低為-157.44 dBW,IGSO衛(wèi)星到達接收機輸入口信號功率最低為-159.42 dBW。
3 導航信號捕獲算法分析
BD-3系統(tǒng)ICD文件規(guī)定,B2a頻點導航信號偽碼周期為1 ms,偽碼碼長為10 230碼片,偽碼頻率為10.23 MHz。BD-3系統(tǒng)B2a頻點導航信號的捕獲算法,采用1 ms相關運算加FFT頻域分析的并行頻域搜索算法。由于相干累積時間超過1 ms會因符號翻轉而降低相干累積效應,因此采用了1 ms相干累積設計。BD-3信號為10 Mbit/s碼,每1 ms的相關運算有10 230碼片,相關運算設計采用每80碼片進行匹配濾波,即1 ms的相關運算可得到128個相關值,采用128點補0~256點的FFT運算設計方式。
在進行1 ms相關運算加FFT后,需要進行若干次非相干累加運算,得到正負頻率的最大幅值所對應的頻點。理論上,捕獲靈敏度的提升與非相干累加的次數直接相關,非相干累加次數越高,捕獲靈敏度越高。但同時,增加非相干累加的次數也會增加捕獲時間。此外,非相干積分存在平方損耗,因此對弱信號的信噪比增益會逐漸降低。增加非相干積分時間所帶來的信噪比提升,會逐漸抵不上由此帶來的捕獲時間增長的缺點。需要通過分析仿真得到最佳的非相干累加次數。
信號增益主要由相干積分增益和非相干積分增益兩部分組成。
1)相干積分增益:相干積分增益為Gcoh=10lg(BW/Bb),其中Bb=1/Tcoh,Tcoh為相干積分時間,BW為射頻前端帶寬。前文已表述相干積分時間為1ms,射頻前端帶寬為Bw=20.46MHz,因此其1ms相干積分增益為Gcoh=43.11 dB。
2)非相干累加是對相干累加后的積分結果進行模平方再累加,解決了相干累加的積分時間受導航數據位跳變限制問題。但是,在對相干積分值的模進行平方時,不僅信號被平方,噪聲也被平方,也就是非相干累加存在平方損耗。
非相干累加的總增益Gi(n)可計算如下:
Gi(n)=10lg (n)-L(n)
式中:n為非相干累加次數;L(n)為非相干累加存在的平方損耗,
其中n為非相干累加的次數;Dc(1)=[erf-1(1-2Pfa)-erf-1(1-2Pd)]2檢測概率Pd=0.9,虛警概率Pfa=1×10-7,可得Dc(1)≈21。
表2給出了非相干累加增益與非相干累加次數之間的對比。

表2 非相干累加增益與非相干積分次數對比
可以看到采用4次非相干積分,其對應的非相干累加增益為3.979 dB。
B2a偽碼周期為1 ms,1 ms內共10 230個碼片。捕獲過程中,采用56路并行碼相位搜索,相鄰兩路碼通道間隔1/4碼片,因此在捕獲過程中需10 230×4/56=731次滑動完一個碼周。
采用1 ms相干積分,4次非相干累加時,捕獲一顆星的時間約為365×4 ms=1.46 s。采用1 ms相干積分,8次非相干累加時,捕獲一顆星的時間約為365×8 ms=2.92 s,即捕獲所需時間增加約1倍。
使用Matlab對捕獲成功率進行仿真,工況分別設為4次和8次非相干累加,每種工況仿真20次,對成功捕獲的次數進行統(tǒng)計。仿真條件中設置較惡劣的50 kHz多普勒頻移,根據不同導航接收機入口信號功率得到結果如表3所示。

表3 捕獲成功率仿真結果對比
通過仿真數據可知,對于4次非相干累加,當入口信號功率為-130 dBm時,捕獲概率為75%;當功率為-131 dBm時,捕獲概率只有25%,已無法保證穩(wěn)定使用。對于8次非相干累加,當入口功率為-131 dBm時,捕獲概率為65%,已經比較差;當功率再下降到-132 dBm時,捕獲概率降至40%。通過增加非相干累加次數,確實可以提升捕獲靈敏度約2 dB。
但根據前文對導航接收信號功率的分析,到達接收機入口的最低功率為-159.42 dBW,即-129.42 dBm。在此功率條件下,4次非相干與8次非相干均能達到100%的捕獲成功率。
在此基礎上,對4次非相干、8次非相干累加的首次定位時間進行仿真,仿真結果如表4所示。
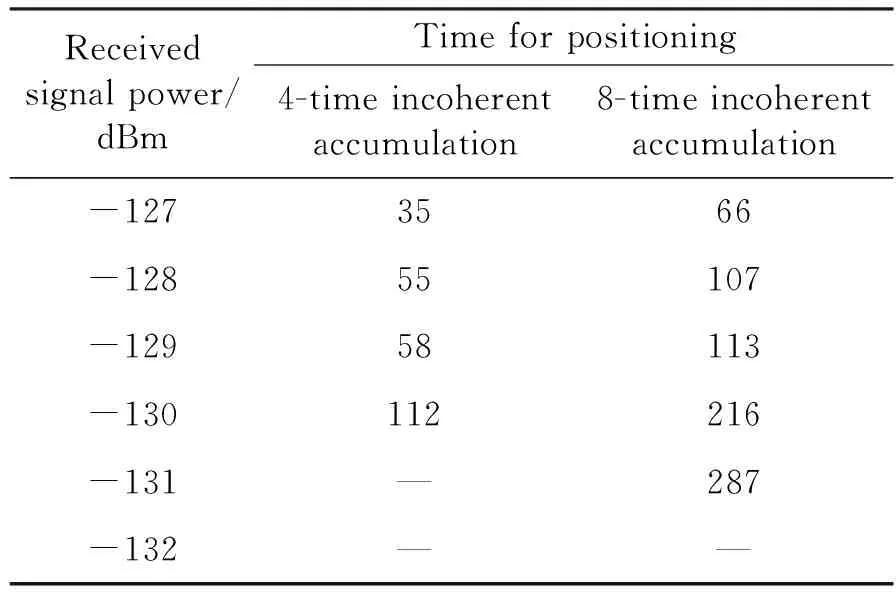
表4 首次定位時間仿真結果統(tǒng)計
由以上分析可知,選用8次非相干累加與4次非相干累加相比,所需的總時間均小于5 min,但所需的捕獲時間會增加約1倍,而靈敏度方面的提升僅不到2 dB。且由于接收機入口功率約為-160 dBW,因此提升的2 dB靈敏度對于實際的捕獲成功概率并無明顯提升。綜合考慮上述因素,捕獲算法中選用4次非相干累加。
4 可視星數及定位精度仿真
為進一步驗證導航接收機捕獲算法可靠性,確保實際在軌使用時能全程實時定位,采用STK建模,以低軌太陽同步軌道衛(wèi)星為例,仿真了全軌道周期內的收星數情況。仿真條件中考慮了捕獲靈敏度為-128 dBm,-130 dBm(對應4次非相干累加),-132 dBm(對應8次非相干累加)3種情況,采用相同的軌道起始時間,仿真了24 h的收星數情況。仿真結果如圖1~3所示。
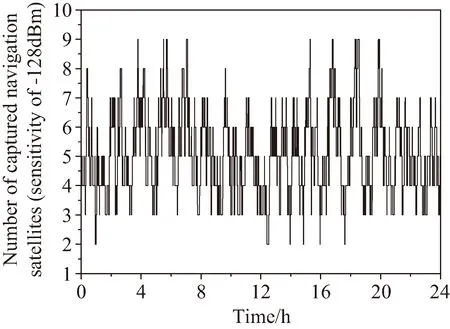
圖1 捕獲靈敏度-128 dBm時收星數統(tǒng)計Fig.1 Number of captured navigation satellites at -128 dBm capture sensitivity
可視星數統(tǒng)計情況如表5所示。
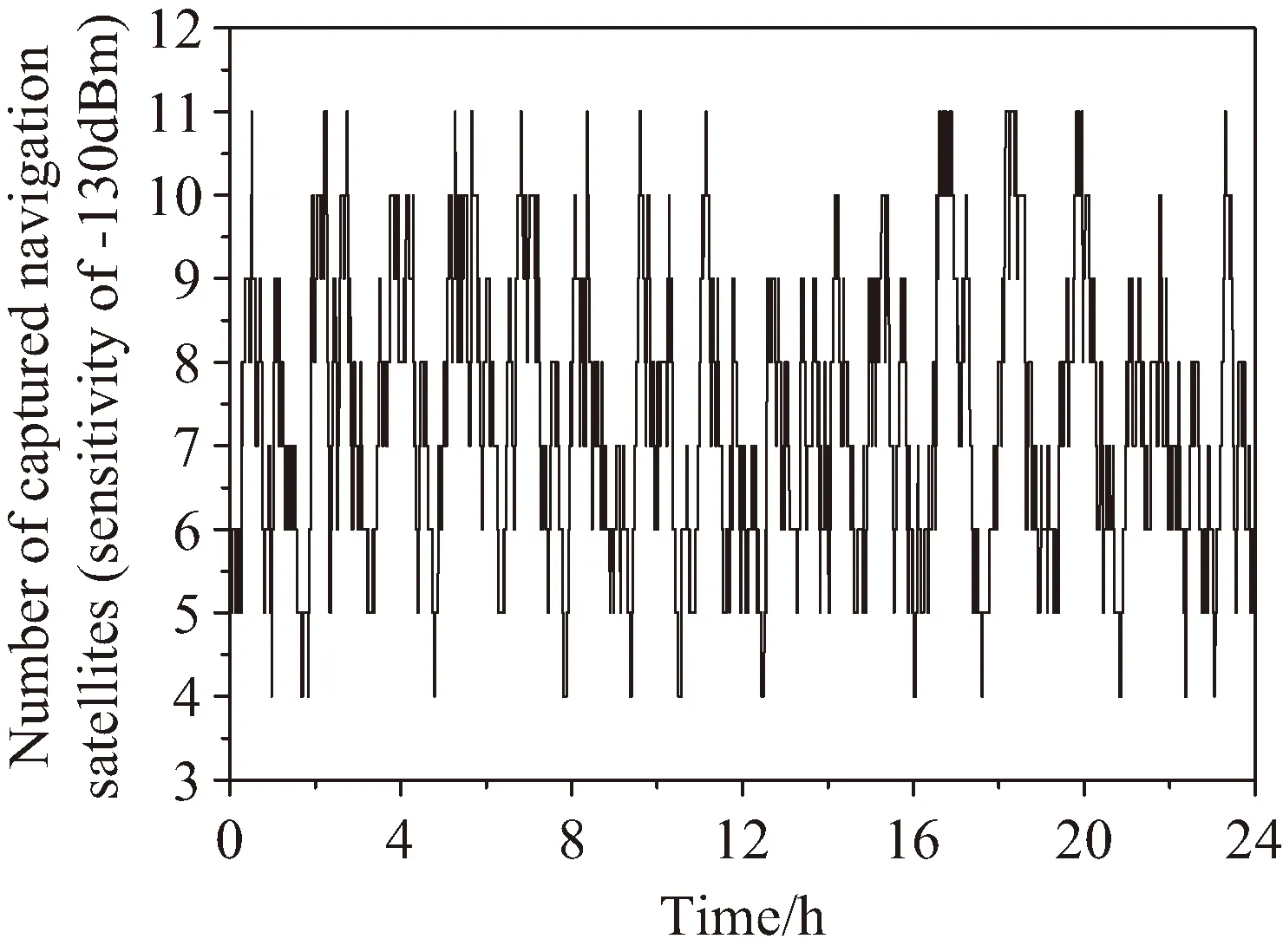
圖2 捕獲靈敏度-130 dBm時收星數統(tǒng)計Fig.2 Number of captured navigation satellites at -130 dBm capture sensitivity

圖3 捕獲靈敏度-132 dBm時收星數統(tǒng)計Fig.3 Number of captured navigation satellites at -132 dBm capture sensitivity

表5 收星數統(tǒng)計
由表5可知,當導航接收機接收靈敏度只能達到-128 dBm時,軌道周期內收星數小于3顆的持續(xù)時間為10 219 s,即存在約11.83%的時間無法定位;其他時間均能滿足4顆及以上的收星數。而如果采用了4次非相干累加算法,靈敏度電平達到-130 dBm時,全程收星數都在4顆及以上,平均收星數達到6.35顆,可保證衛(wèi)星穩(wěn)定定位。當采用8次非相干累加算法時,最小收星數也是4顆,平均收星數8.44顆,同樣可以保證穩(wěn)定定位需求。因此,選用4次非相干累加已經可以滿足穩(wěn)定定位需求,且具有更快的捕獲速度。
進一步,對定位精度進行了仿真,仿真時長800 min,仿真結果如圖4所示。
以圖4中X軸殘差σx為例,
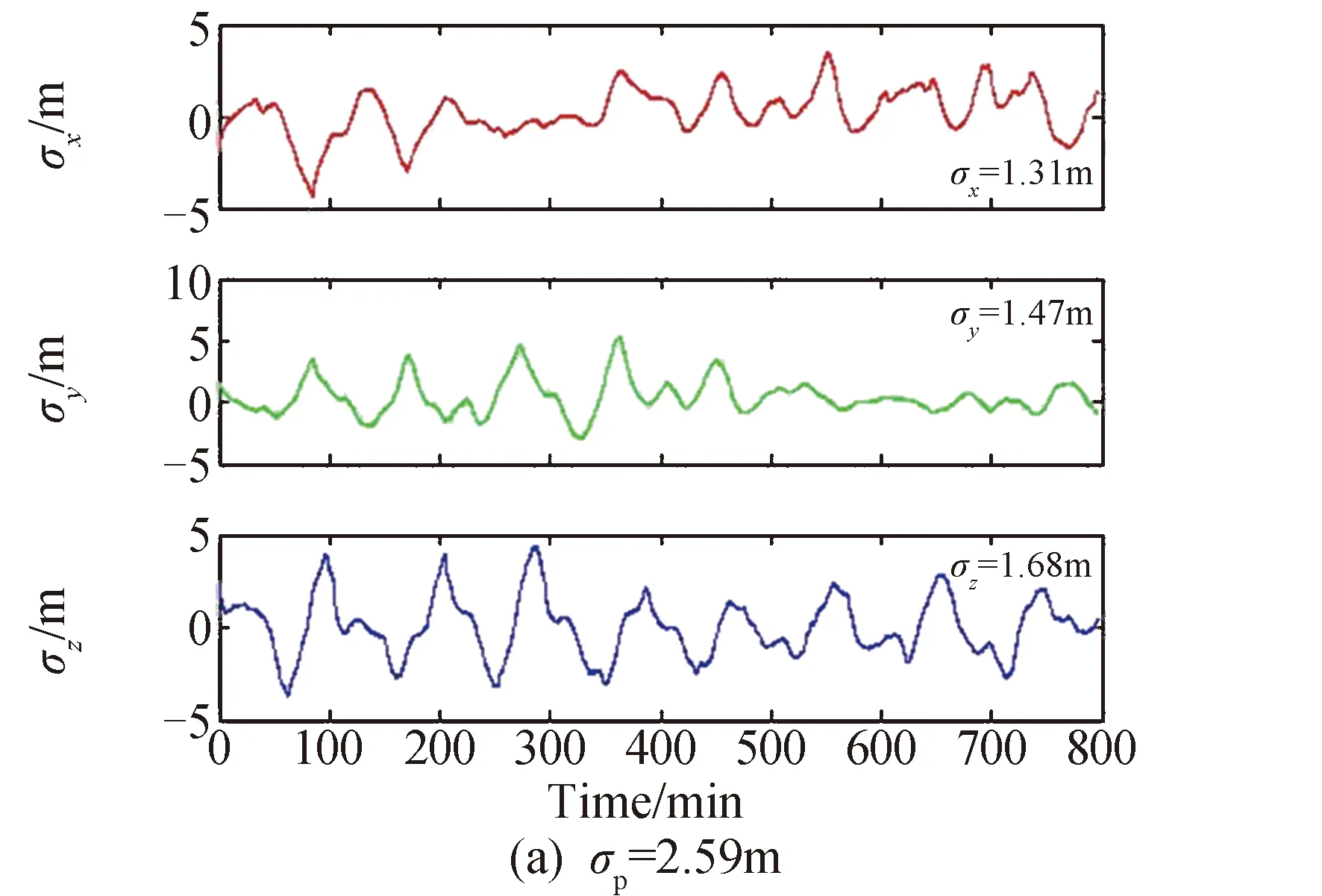
圖4 定位輸出位置精度/速度誤差仿真Fig.4 Simulated results of positioning and speed accuracy
式中:xi為X軸位置仿真輸出值;x'i為X軸位置理論值;從第1 min到第800 min,每分鐘記1個點,n=800。通過計算長時間的仿真值與理論值均方根,得出X軸位置精度誤差。Y軸位置殘差σy和Z軸位置殘差σz,以及X,Y,Z軸速度殘差σvx,σvy,σvz的計算方法相同。
位置精度σp的計算公式為:
通過計算X軸,Y軸,Z軸三軸的均方根,得出三維定位位置精度。
速度誤差計算方法與上述過程相同。
BD-3模式定位精度、速度誤差仿真結果如表6所示。

表6 定位精度、速度誤差仿真結果
通過以上仿真結果可以看出,使用BD-3模式,定位精度可達2.59 m,小于北斗系統(tǒng)給出的10 m系統(tǒng)指標;速度誤差為0.003 78 m/s,可以滿足衛(wèi)星定位使用需求。
5 在軌實測
2020年末,在BD-3導航星座系統(tǒng)部署完成后,第一時間開展了在軌實測和驗證工作。搭載導航接收機的衛(wèi)星于2020年12月29日上午10點啟動BD-3模式,開始捕獲BD-3導航信號。128 s后,導航接收機捕獲星數達到6顆,并完成定位解算,給出了衛(wèi)星實時位置信息,首次定位時間小于5 min。這是在軌衛(wèi)星首次使用BD-3導航星座系統(tǒng)實現定位解算。之后,對可視星數及定位狀態(tài)進行了統(tǒng)計,統(tǒng)計結果如圖5所示。共統(tǒng)計了36 000 s的收星數數據,收星數始終大于6顆,最多有10顆被同時捕獲,可以穩(wěn)定保證超過4顆實現全程定位的需求。可以看出,在軌實測的最少收星數為6,大于仿真的4顆。這主要是因為在仿真中邊界條件設置為捕獲靈敏度-130 dBm,而在實際中,捕獲之后的跟蹤環(huán)路靈敏度更高。
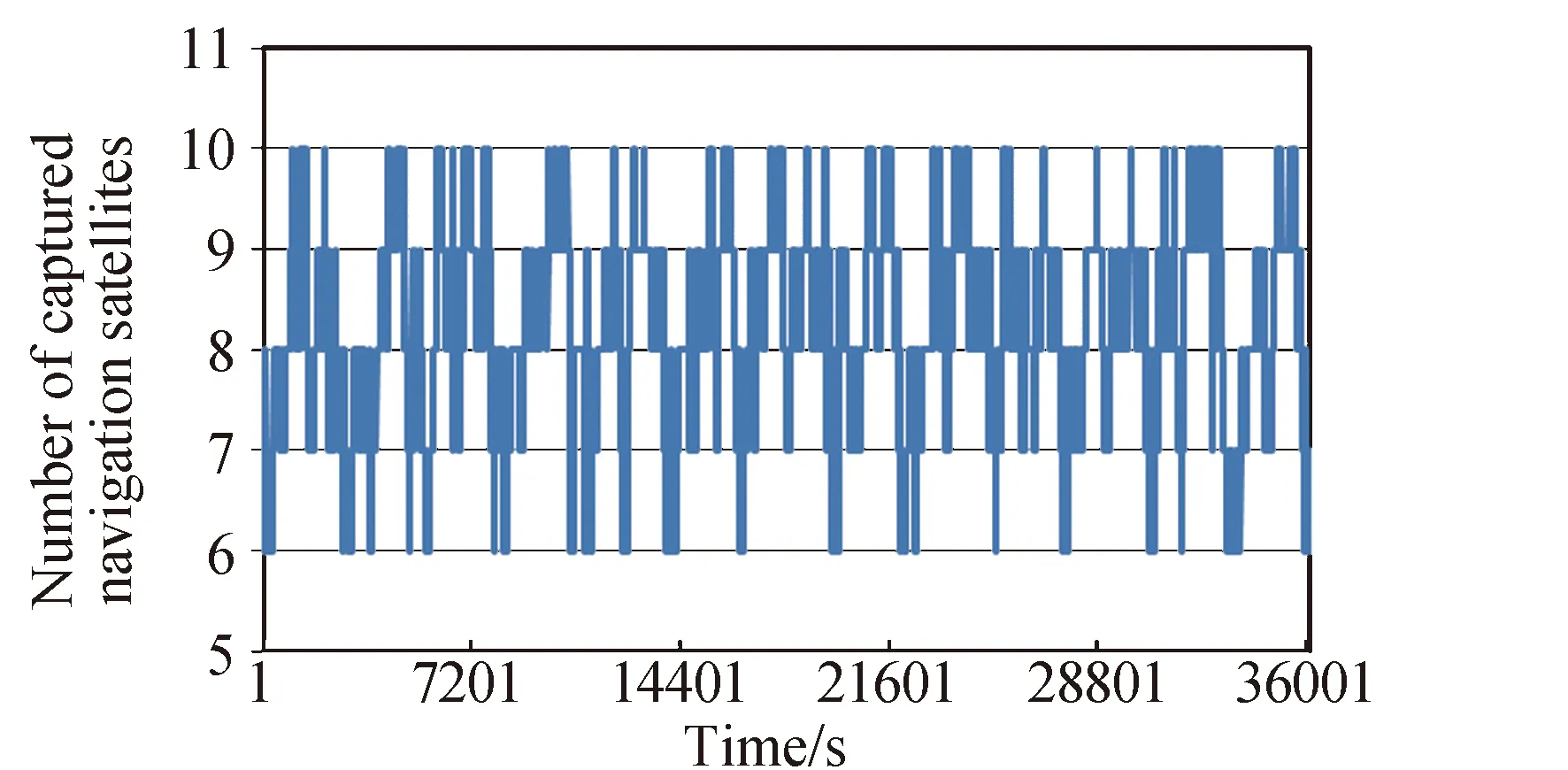
圖5 在軌實測北斗三號收星數統(tǒng)計Fig.5 Number of captured satellites of on-orbit test
在軌實時定位精度、速度誤差分析結果如圖6所示。
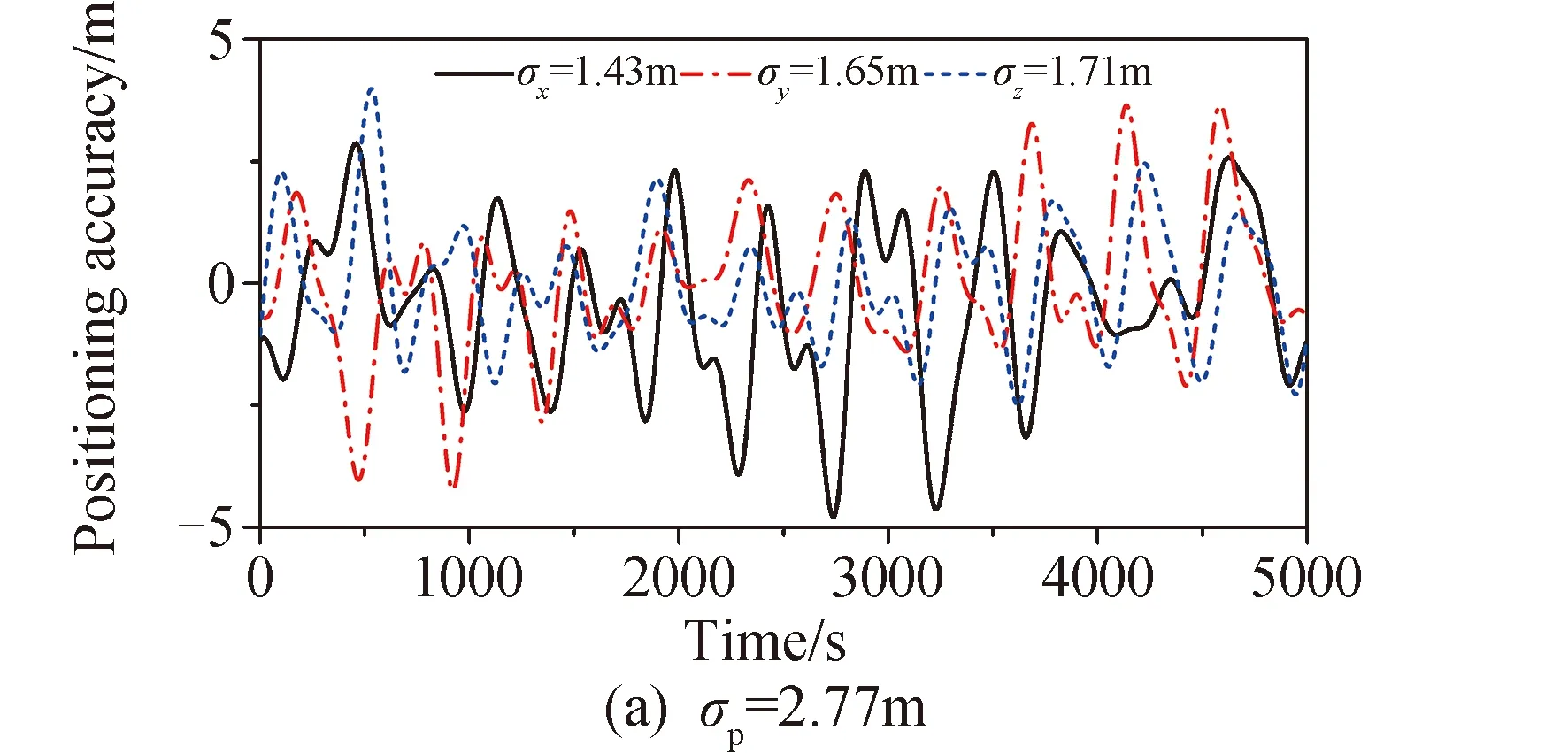
圖6 在軌實測定位精度/速度誤差結果Fig.6 On-orbit tested accuracy of positioning and speed
將BD-3模式下定位精度、速度誤差的仿真結果與實測結果匯總如表7所示。
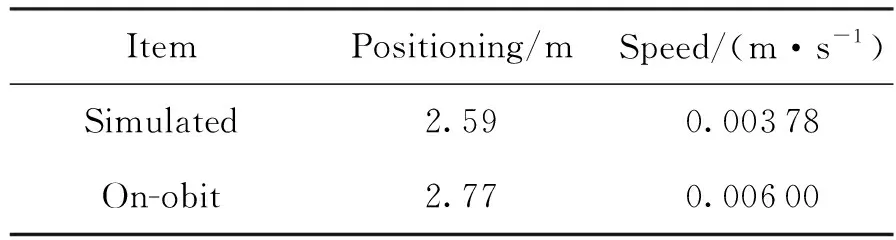
表7 位置精度、速度誤差結果對比
由對比結果可知,在軌實測結果與仿真結果的位置精度、速度誤差均處于同一量級,在軌實測數據相較于仿真結果略差。其中在軌實測位置精度2.77 m,比仿真結果差了0.18 m,即約6%;速度誤差0.006 m/s。上述差異可能是由于仿真系統(tǒng)中的攝動模型參數設置,諸如天體引力、太陽風、大氣擾動等與實際情況存在不同所導致。實測結果與仿真結果精度相當,具有良好的一致性。
6 結論
本文以BD-3系統(tǒng)鏈路為出發(fā)點,分析了BD-3信號到達接收機的功率,通過對接收機捕獲算法中相干與非相干的分析與仿真,綜合考慮捕獲概率、收星數、捕獲時間等因素,得出4次非相干累加較優(yōu)的結論。在完成中國首次基于BD-3系統(tǒng)的衛(wèi)星定位測試后,對收星數、定位精度、速度誤差等關鍵數據進行仿真與實測的對比分析,兩種結果精度量級一致,具有良好的一致性。該結果一方面證明本文所述理論分析結果基本擬合了實際情況,可以作為后續(xù)其他在軌航天器應用BD-3系統(tǒng)的參考,另一方面也證明了BD-3系統(tǒng)已具備為中低軌航天器提供全球定位服務的能力,且實現了導航系統(tǒng)指標。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
