基于QT的雷達目標跟蹤系統設計實現
2022-04-22 01:39:38王晉晶汪楓劉潤華謝超
科技風 2022年11期
王晉晶 汪楓 劉潤華 謝超



摘 要:現代雷達面臨的環境日益復雜,空中目標可能達到幾百甚至上千批,并采用各種協同或非協同方式機動,無處不在的噪聲、雜波和干擾也帶來大量不確定性。針對日益復雜的現場態勢,本文提出一種基于QT平臺雷達目標跟蹤系統的設計方案。該系統能根據環境自適應選擇跟蹤算法,實現目標跟蹤處理和目標信息實時顯示的功能。系統功能較為完備、界面友好,具有易操作、易維護、可移植到多種平臺等優點。
關鍵詞:QT平臺;目標跟蹤;信息顯示
雷達目標跟蹤系統是操作員與雷達系統進行交互的一個重要平臺,主要負責目標跟蹤處理和目標信息實時顯示,實現操作員對戰場狀態的監控。目前QT開發框架相比于其他開發產品,界面化程度更高,而且QT界面構建更直觀、迅速、簡潔,因此本文選用QT進行軟件開發。QT作為一個跨平臺開發框架非常完備,不僅提供了集成開發環境IDE和跨平臺開發工具QT Creator,而且QT的類庫非常豐富,包含多種對象模型、集合類、圖形用戶界面編程和布局設計功能等,適用于開發高性能、跨平臺的人機交互界面。
1 系統總體架構
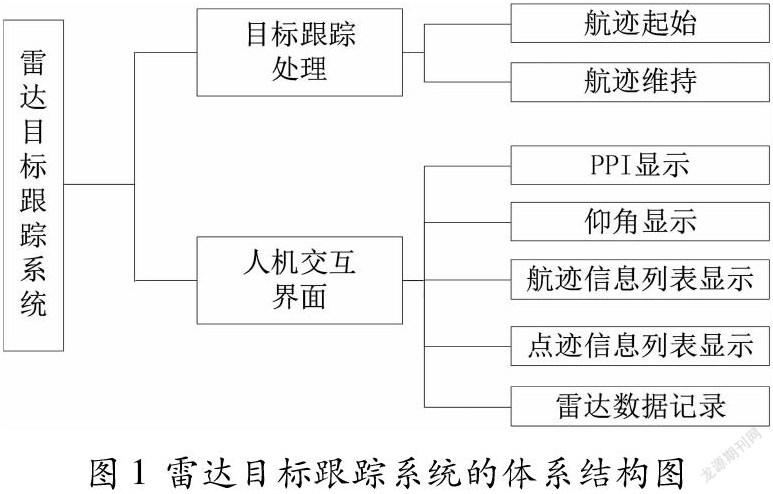
雷達目標跟蹤系統主要由目標跟蹤處理和人機交互界面兩大模塊組成,如圖1所示。目標跟蹤處理模塊能根據背景環境中的目標和雜波等信息自適應選擇跟蹤算法,完成航跡處理,其主要包含航跡起始模塊和航跡維持模塊。人機交互界面主要完成目標信息的實時顯示與雷達工作參數設置功能。目標信息的實時顯示包括圖像顯示、航跡信息列表顯示等,目標圖像顯示可以直觀展示目標實時位置和目標航跡,航跡信息列表顯示則詳盡顯示目標的運動狀態,如速度、加速度、航向等,以便操作員做出正確的判斷。
整個雷達目標跟蹤系統基于QT的插件架構實現。插件架構可以將系統中多個獨立的功能模塊封裝到一個個插件中,然后利用插件管理器管理所有插件。在開發階段或后期維護階段各插件模塊可獨立進行改動和升級,因此系統具有良好的可維護性和可擴展性。因此在本系統中,將航跡起始、航跡維持、PPI顯示、仰角顯示、航跡信息列表顯示、點跡信息列表顯示和雷達數據記錄這七個功能模塊分別封裝到七個插件中。使用插件架構后,雷達目標跟蹤系統的邏輯流程圖如圖2所示。首先獲取恒虛警處理后過門限的點跡數據,然后使用航跡起始插件和航跡維持插件進行目標跟蹤處理,跟蹤結束后就會觸發信號發送目標信息,在該信號連接的槽函數接收到信號后就會立刻響應完成各插件的功能。
本系統中QT的信號和槽通信機制起到至關重要的作用,該機制是QT獨有的功能。在任意QT對象中均能設置信號函數或槽函數,當一個信號被觸發后,與其相連接的一個或多個槽函數就會自動響應。因此通過該機制可以實現任意兩個QT對象通信,完成插件間數據的快速傳輸。
2 目標跟蹤處理模塊實現
目標跟蹤處理就是對雷達的量測值進行處理,給出正確和精確的目標航跡數據。在雷達進行目標跟蹤處理時一般采取分區處理,將雷達掃描1周所形成的區域平均劃分成多個扇區,在進行跟蹤處理時依次對每個扇區進行處理。分區處理可以降低計算機運算量,從而保證目標跟蹤處理的實時性。
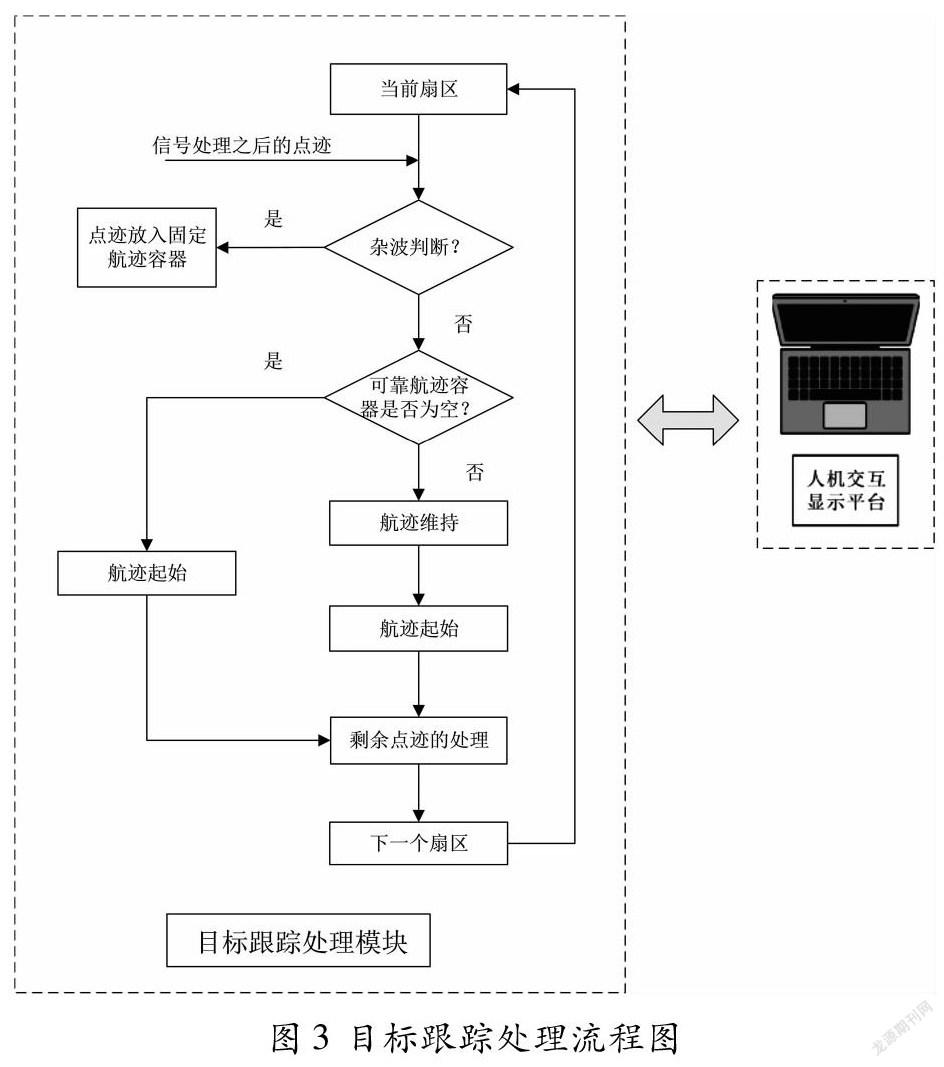
目標跟蹤處理的流程圖如圖3所示,目標跟蹤處理按扇區依次進行。在點航互聯中必須按照一定的優先級:固定航跡最高,可靠航跡較高,暫時航跡次之,可能航跡最低。因此在目標跟蹤處理模塊中,首先判斷點跡是否屬于固定航跡,即是否屬于固定雜波。然后判斷可靠航跡是否為空,若不為空則按照優先級先在航跡維持模塊中進行點跡與可靠航跡的互聯,緊接著再在航跡起始模塊中進行點跡與暫時航跡、可能航跡的互聯;若為空則直接進入航跡起始模塊。最后進行剩余點跡的處理,主要是將未互聯成功的點跡存入可能航跡容器中,等待下一天線掃描周期再進行航跡起始操作。點跡和航跡的容器均使用QHash類實現。
2.1 航跡起始模塊的實現
為快速起始目標航跡,并降低雜波起始成功的概率,選用滑窗法的3/3邏輯,即在連續3次雷達掃描的時間窗內,只有檢測數達到3時航跡起始才成功。航跡起始模塊的邏輯流程圖如圖4所示。
在航跡起始模塊中,暫時航跡是指由兩個點跡組成的航跡,可能航跡是指由一個點跡組成的航跡。當前扇區的點跡先與暫時航跡進行互聯,未能互聯成功的再與可能航跡進行互聯。由于進行目標跟蹤處理時采用了分區處理,并且目標有可能跨越扇區運動,因此遍歷航跡容器中的航跡時僅需遍歷當前及相鄰扇區內的航跡,而無須遍歷所有航跡。
2.2 航跡維持模塊的實現
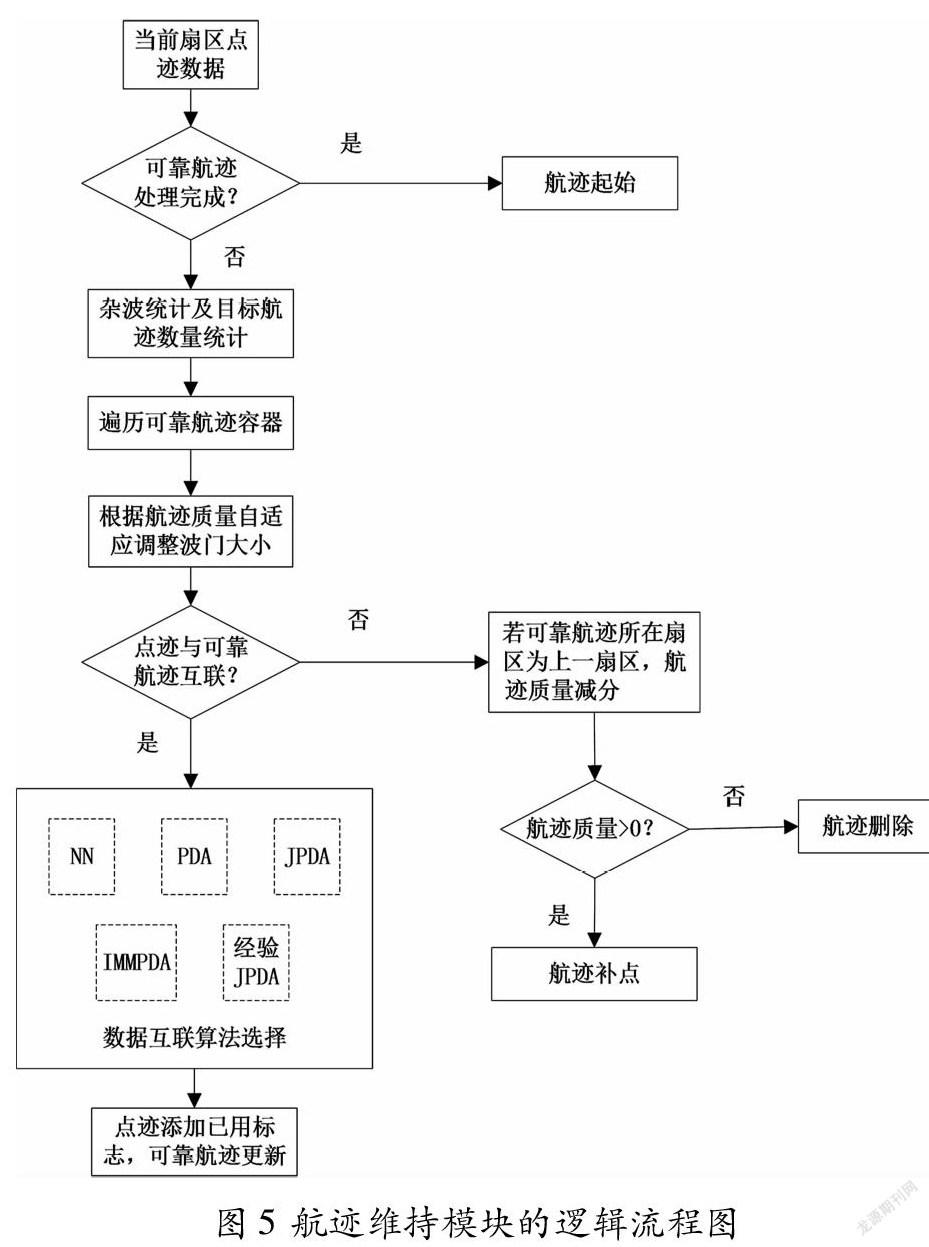
航跡維持的關鍵是為可靠航跡匹配上目標量測點。本跟蹤系統中,為保證可靠航跡與正確量測點的有效互聯,可根據背景環境自適應選擇跟蹤算法,并在跟蹤過程中依據航跡質量情況在大、中、小三種波門之間進行調整。航跡維持模塊的邏輯流程圖如圖5所示。
在航跡維持模塊中,首先對當前扇區內的雜波和目標進行統計。然后依次對當前扇區和相鄰扇區內的可靠航跡進行處理,在每次處理之前,需要先根據該航跡的航跡質量情況在大、中、小三種波門之間調整,以此提高捕獲目標點跡的概率,同時使波門的無關點跡盡可能少。最后進行點跡與可靠航跡的互聯,若互聯成功則根據雜波和目標統計結果選擇一種數據互聯算法來更新航跡,模塊中內置了數據互聯算法有最近鄰域(NN)、概率數據互聯(PDA)、交互多模型概率數據互聯(IMMPDA)、聯合概率數據互聯(JPDA)和經驗JPDA算法等。
3 終端顯控界面實現
終端顯控界面實現涉及PPI顯示、仰角顯示、航跡信息列表顯示、點跡信息列表顯示和雷達數據記錄插件的實現。下面以PPI顯示插件和航跡信息列表顯示插件這兩個插件為例介紹其實現過程。
3.1 PPI顯示模塊的實現
QT的圖形視圖框架結構非常適用于雷達PPI顯示的實現,其三個組成部分為場景、視圖和圖元。在PPI顯示插件的實現中,先設計并實現PPI顯示中用到的多種圖元,如坐標軸圖元、目標航跡圖元、航跡號圖元、掃描線圖元和雷達余暉圖元等,再利用場景加載各種圖元,最后用視圖對場景中的所有圖元進行顯示。各類圖元的設計比較復雜。掃描線圖元可利用QGraphicsLineItem類實現,掃描線的旋轉操作可通過函數setRotation設置旋轉角度來實現。雷達余暉圖元是通過QConicalGradient類的圓錐式漸變效果來實現的。目標航跡圖元則比較復雜,因航跡包括當前航跡點跡和若干有序的歷史航跡點跡,因此需要添加航跡容器來存儲目標航跡信息,目標航跡圖元是通過繼承圖元基類QGraphicsItem類,并在類中添加航跡容器來實現。
在雷達進行PPI顯示時,屏幕刷新動作由定時器事件QTimerEvent類實現,屏幕刷新的時間間隔在定時器事件中設定。在每次屏幕刷新時,首先獲取當前扇區對應的方位角,一方面是據此設置掃描線和余暉的角度,完成掃描線和余暉的轉動。另一方面是據此獲得該扇區的目標航跡信息,完成目標航跡的更新。在屏幕刷新時如果每次都重繪所有圖元,勢必會占用大量內存,極有可能產生界面卡頓情況。為提高顯示的流暢度,在每次進行屏幕刷新時,只重繪掃描線圖元、雷達余暉圖元和目標航跡圖元,在顯示量程沒有改變情況下無須重繪坐標軸圖元。
在PPI顯示視圖中還實現了多種人機交互功能,如更改顯示量程、視圖縮放倍數的顯示、當前鼠標坐標位置的顯示等。其中最重要的是更改顯示量程,使用視圖類QGraphicsView中的函數voidscale來實現顯示量程的放大和縮小。如果需要觀察目標細節,可減小顯示量程從而放大視圖,如果需要在更大范圍內監視目標,則增大顯示量程從而縮小顯示視圖。
3.2 航跡信息列表顯示模塊的實現
航跡信息列表顯示插件采用QT的模型視圖結構來實現,它將數據與視圖分離,使得系統開發更為簡潔和靈活。模型視圖結構主要包含模型、視圖和代理三部分。在航跡信息列表顯示插件的實現中,使用QT中預置的QAbstractTableModel類實現表格模型,在模型中有用于列表顯示中數據的數據結構。使用QTableView類實現表格視圖,使用setModel函數即可使用該視圖顯示模型中的項目。其中QTableView類提供了默認的代理實現類QItemDelegate,通過代理能夠自定義數據條目的顯示方式。完成模型、視圖和代理的設計就完成了航跡信息列表顯示的框架。航跡信息的實時顯示比較簡單,只需通過航跡編號獲得該航跡位于航跡列表中的行數,然后對該行航跡信息進行更新即可。
4 系統測試
在windows操作系統上使用QTCreator開發雷達目標跟蹤系統,接入某型雷達的實測數據后運行結果如圖6和圖7所示。從運行結果可看出,本跟蹤系統界面美觀、操作便捷、功能較為豐富,能正確實現對多種目標,如航跡交叉、機動目標的穩定跟蹤,并能以多種顯示方式實時顯示目標航跡圖像和航跡信息。
結語
本文在windows操作系統下,利用QT開發雷達目標跟蹤系統,該系統能夠根據環境自適應選擇目標跟蹤算法,實現目標跟蹤處理和目標信息實時顯示的功能。基于QT平臺也使本系統具有高穩定性、高可移植性、強實用性等多種優點。而且本系統不僅可以接入仿真數據,還能接入實測數據,能應用于教學研究、實驗測試和系統聯調等多種場景。
參考文獻:
[1]Yaakov B S,Thomas E F.Tracking and data association[M].America:Elsevier Science,1988.
[2]何友,修建娟,關欣.雷達數據處理及應用[M].北京:電子工業出版社,2013.
[3]金大,張紅艷.Qt5開發實戰[M].北京:人民郵電出版社,2015.
[4]陸文周.Qt5開發及實例(第3版)[M].北京:電子工業出版社,2017.
[5]王晉晶.雷達目標跟蹤算法研究與實現[D].西安電子科技大學,2019.
作者簡介:王晉晶,女,碩士,信號與信息處理專業,主要研究方向為雷達目標跟蹤處理;汪楓,女,碩士,副教授,主要研究方向為新體制雷達目標檢測、成像、識別理論和方法;劉潤華,女,碩士,教授,主要研究方向為雷達目標檢測、成像、識別理論和方法;謝超,男,博士,主要研究方向為新體制雷達目標檢測、成像理論和方法。