基于施工載荷的混凝土泵車整車動力學分析
2022-04-23 04:44:28龐曉平余岫卷李春林
重慶大學學報 2022年4期
張 果,龐曉平,余岫卷,李春林
(重慶大學 機械傳動國家重點實驗室,重慶 400044)
混凝土泵車是基建工程中的重要施工設備,目前混凝土泵車正面臨大尺度、輕量化、高可靠、長壽命的巨大挑戰,然而提高其大尺度與輕量化的同時又必然導致臂架低頻振動加劇[1],使結構更易遭受疲勞和不穩定的問題,影響結構壽命和可靠性[2-3]。
眾多學者對混凝土臂架的動力學與振動問題進行了研究。文獻[4-6]采用傳遞矩陣法建立了泵車臂架動力學模型,求解得到了任意姿態下的固有頻率,并采用虛擬樣機技術研究了臂架柔體模型運動停止后的振動特性。Henikl等[7]采用基函數來近似解析梁的彈性彎曲,建立了泵車臂架振動的動力學方程,為彈性振動的主動阻尼控制策略和軌跡規劃提供了數學模型。Zhong等[8]采用ADAMS虛擬樣機技術,模擬了臂架由水平位姿向典型位姿轉變的過程,得出了液壓缸的驅動力變化曲線。Gou等[9]應用ADAMS軟件,分析了臂架末端位移和加速度的頻響特性。文獻[10]以混凝土泵車臂架系統為研究對象進行有限元仿真分析及優化。以上研究只針對混凝土泵車臂架單一系統進行,下車(底架和混凝土泵等子系統)與臂架的動力學耦合作用未予以考慮,然而,混凝土泵車的各子系統間存在相互耦合與共同作用的關系[11-12],共同影響整機動力學效應,是一個不可分割的整體。因此,現有研究缺乏以混凝土泵車整機為研究對象的動力學建模分析。
筆者研究混凝土泵車施工作業過程中的動力學振動問題,分析整機受到的沖擊激勵,建立其澆筑作業時的實時動態載荷模型,提出一種符合混凝土泵車實際工作受載與動態服役行為的沖擊理論與仿真模擬的方法,為混凝土泵車安全性能評估和泵車減振設計、振動控制提供有力支持。
1 整機有限元建模
1.1 混凝土泵車結構簡介
混凝土泵車的種類可以按照臂架長度、泵送方式、分配閥類型、臂架折疊方式以及支腿形式進行劃分,其基本的組成形式是相同的,常見的混凝土泵車的結構主要包括底架系統、臂架系統,泵送系統、液壓系統、汽車底盤及回轉機構,混凝土泵車的基本結構如圖1所示。

1.料斗;2.底架系統;3.支腿;4.轉臺;5.底盤大梁;6.副車架;7.混凝土泵;8.第1節臂架油缸;9.第2節臂架油缸;10.第1節臂架;11.第2節臂架;12.臂架輸送管;13.汽車底盤 圖1 混凝土泵車主要結構圖Fig. 1 Main structure diagram of concrete pump truck
1.2 材料屬性
混凝土泵車臂架與支腿箱梁采用高強度鋼WELDOX960板材焊接而成,其他部位的鋼材以Q345為主,2種鋼材的力學性能參數見表1。

表1 材料參數
1.3 有限元建模
將幾何模型導入HyperMesh有限元前處理軟件,進行幾何清理及修復、網格劃分、賦予材料與屬性、建立連接、施加約束與載荷等,這些步驟是復雜機械結構有限元建模的常用方法[13]。然而,對于混凝土泵車這類零部件眾多的整機設備進行有限元建模時,通常采用先建立子系統有限元模型,再進行總裝配的方法。本文研究對象是混凝土泵車整機,分底架系統、臂系統和汽車底盤及混凝土泵附件等三大子系統,分別對其進行有限元建模,再組裝為一體建立整機有限元模型。
1)底架系統。底架系統主要組成元素有鋼板、銷軸、軸套、油缸等部件,考慮各部件的外形尺寸和實際受力形式,采用殼、梁、桿及實體單元為主要單元類型建立了底架系統各部件的有限元模型,底架系統有限元模型如圖2所示。

圖2 混凝土泵車底架有限元模型總成Fig. 2 The Finite element model of the underframe of the concrete pump truck
2)臂架系統。臂架單元類型選擇與底架相似,綜合采用桿、梁、殼及實體單元類型對臂架各構件進行模擬,其中支撐液壓缸采用桿單元建模,銷軸和混凝土管采用梁單元建模,銷孔壁采用梁單元模擬,銷軸與孔的作用關系采用REB2剛性蛛網進行連接模擬,并釋放梁單元節點處的軸向旋轉自由度以保證用于模擬銷軸的梁單元具有與實際相符的運動自由度,不考慮銷軸與孔的配合間隙。各焊接鋼板采用殼單元建模,轉臺底部厚板采用實體單元建模,臂架系統有限元模型如圖3所示。

圖3 臂架系統有限元模型Fig. 3 The finite element model of boom system
3)汽車底盤及混凝土泵附件系統。混凝土泵車底架與汽車底盤通過副車架連接,混凝土泵安裝在汽車底盤的副車架上,底架、混凝土泵—副車架—底盤構成泵車下車主要結構。實際結構中,底架通過其自身的耳板與副車架間的螺栓連接固定于副車架前半段,混凝土泵通過螺栓連接固定于副車架后半段。
混凝土泵車作業時,混凝土泵受到的泵送反力沖擊通過混凝土泵與副車架的連接結構傳遞到副車架上,因此,需對底盤副車架和大梁進行詳細有限元建模以確保泵送反力對下車的沖擊傳載盡可能準確。汽車底盤視作被底架抬離地面的質量體,可采用附加于底盤大梁上的附加質量模擬該質量體以進行簡化。進行有限元前處理時,應根據混凝土泵車實際的前、后軸載荷計算出底盤大梁前、后軸位置的附加質量點單元的質量大小,并通過剛性耦合將其固定在底盤前軸與后軸的相應位置,有限元模型如圖4所示。

圖4 大梁附加質量點單元Fig. 4 Additional mass point element
4)混凝土泵車整機有限元模型。將已建立的底架系統、臂架系統、底盤及混凝土泵等三大子系統有限元模型進行組裝,完成混凝土泵車整機有限元模型的建立。通過剛性耦合單元RBE2模擬底架系統與底盤及混凝土泵的螺栓固定連接,采用MPC多面約束方程耦合臂架根部轉臺與底架頂部圓筒頂面,以模擬臂架系統與底架系統之間的連接,以此方式實現混凝土泵車有限元模型的整機裝配,整機有限元模型如圖5所示。

圖5 混凝土泵車整機有限元模型Fig. 5 The finite element model of the concrete pump truck
2 混凝土泵車受載分析及處理
混凝土泵車澆筑作業時,泵送負載隨推送過程變化,混凝土泵在推送混凝土的同時,也受到來自被推送的混凝土的反向沖擊作用,該沖擊載荷通過混凝土泵安裝位置傳遞至混凝土泵車的下車;同時被推送入輸送管道中的混凝土也會對輸送管道產生脈動沖擊。由于混凝土輸送管道依附于臂架,這必然會導致懸臂梁工作原理的臂架受到來自混凝土流動而引起的摩擦沖擊載荷。因此,在仿真分析中除了需要考慮泵車整機重力和混凝土重力,還必須對混凝土泵車承受的混凝土流動引起沖擊激勵進行分析,可以將其視為混凝土流體與混凝土泵及管道之間的相互作用荷載。
2.1 混凝土摩擦沖擊模型
2.1.1 混凝土流速模型
混凝土是一種典型的Binham流體,它在管道中的流動可視作柱塞流。混凝土泵澆筑作業時,雙缸往復式活塞泵的2個活塞桿交替推送混凝土。文獻[14]呈現了混凝土泵單個液壓油缸活塞桿的工作行程變化規律,根據兩連通油腔的液壓油總體積不變的原理,可以得到另一個活塞桿的運動行程,如圖6所示。每個完整泵送周期內,兩個混凝土缸分別完成一次推送和吸入混凝土的工作。在活塞桿每個穩定推送階段行程位移與時間大致成正比,說明此時活塞桿做勻速運動;在推送過程中的換向階段,活塞桿行程位移斜率逐漸變緩直至反向后又逐漸增大,說明活塞桿在換向階段分別經歷了減速階段和加速階段。每個周期起始和結束時刻混凝土的速度近似為0。
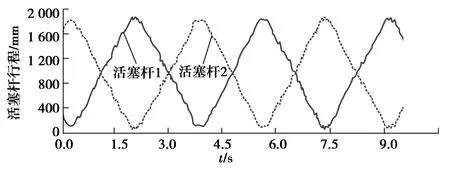
圖6 活塞桿工作行程圖Fig. 6 Piston rod working stroke diagram
根據以上對混凝土泵送流速的分析,將矩形波速度曲線內每個周期的開始與結束階段緩化過渡,用諧波表示。根據文獻[15],混凝土泵分配閥換向時間與活塞桿推送混凝土的時間比為0.2~0.3,文中取為0.25。則在每個推送周期T時間內,換向時間為T/5,推送時間為4T/5,可繪制出新形式的混凝土流動速度曲線,如圖7所示。

圖7 混凝土流動速度曲線Fig. 7 Concrete flow velocity curve
混凝土在管道中的實時流動速度在單個周期內的表達式為
(1)
式中vmax為混凝土最大實時流動速度。當泵送方量為Q、輸送管內半徑為r時,混凝土在管道中的最大流動速度為

(2)
2.1.2 混凝土摩擦阻力載荷
日本學者森永繁通過對混凝土管道流進行試驗研究,得到了定常流速混凝土在管道中流動的摩擦阻力f的計算關系式為[16]
f=2πr[K1+K2v定常]L,
(3)

K1=(300-SL)×10-6,
(4)
K2=(400-SL)×10-6。
(5)
混凝土不同流速對應不同的摩擦阻力,隨流速增大,摩擦阻力呈線性增加,將式(3)中的混凝土定常流速v定常替換為混凝土泵送實時流速v(t),可以得到混凝土實時摩擦阻力表達式:
f=2πr[K1+K2v]L。
(6)

圖8 活塞桿應變電壓信號Fig. 8 Piston rod strain voltage signal
文獻[17]提供了混凝土泵兩個活塞桿推送混凝土時的應變電壓信號變化曲線,如圖8所示。在每個推送周期內,活塞桿的負載變化趨勢與本文中提出的混凝土流速變化一致,證明了采用式(6)計算混凝土摩擦阻力的合理性。
2.2 泵送沖擊載荷模型
混凝土泵的兩個液壓驅動油缸的內部結構和其工作的特點,也決定了其推送混凝土時受到反力沖擊的周期性。混凝土泵通過液壓驅動與控制系統對兩個液壓油缸的交替驅動,實現砼缸1和砼缸2的交替推送混凝土,其工作示意圖如圖9所示。

圖9 混凝土泵工作原理示意圖Fig. 9 Schematic diagram of concrete pump working principle
設砼缸推送混凝土截面面積為Sc,混凝土壓力為Pc,液壓油缸無桿腔有效作用面積為S0,有桿腔有效作用面積為S1,供油路壓力為Pp,回油路壓力為P0,連通油路壓力為Pz,砼缸1和砼缸2內的活塞桿在運動時受到的摩擦力分別為f1和f2。根據力平衡原理,可得:
PcSc=(Pp-P0)S0-f1-f2。
(7)
當混凝土泵空載運行,即Pc=0時:
(8)
聯立式(7)~(8),可得混凝土對混凝土泵的作用力為:
(9)
2.3 分析類型與邊界條件
混凝土泵車定姿態澆筑作業時受到多種動態沖擊激勵共同作用,屬于受迫振動的范疇,因此在進行有限元動態分析時應選用瞬態響應分析類型。瞬態響應分析是計算受迫振動動態響應的最通用方法,其目的是計算結構在時變激勵下的行為,瞬態分析獲得的重要結果通常是網格節點的位移、速度和加速度,以及單元的應力[17]。文中采用MSC.NASTRAN Solver進行混凝土泵車整機有限元仿真計算,該求解器用于瞬態響應分析有直接瞬態分析法和模態瞬態分析法兩種不同的數值方法:直接瞬態分析方法是對完整的耦合運動方程進行數值積分,模態瞬態分析方法是利用結構的模態形狀來簡化和解耦運動方程,并對各個模態響應求和以獲得解。對于大型模型的長時間激勵的瞬態響應分析,推薦使用模態瞬態分析方法。
設置整機有限元瞬態分析邊界條件時,將4條支腿底端約束X/Y/Z3個方向的平移自由度以模擬地面對4條支腿的支撐與固定關系。如圖10所示,在混凝土泵與副車連接處施加泵送沖擊力,在臂架管道上施加混凝土摩擦沖擊力。泵送油缸引起的下車體振動將通過泵送反力與副車架、底盤大梁以及被懸掛的汽車底盤的相互作用被模擬出,并且由此引起的車體振動及臂架振動影響將直接被包含在仿真結果中。

圖10 混凝土泵車整機有限元分析的邊界條件Fig. 10 The boundary conditions of the finite element analysis of the concrete pump truck
在管道各節點上創建質量點單元,管道上的摩擦沖擊力施加于混凝土輸送管道的1D梁單元的節點上,且各個節點上的力受到梁單元劃分時的長度和軸線方向的影響,這就導致手工施加的困難。為解決該問題,此處提供一種快速計算施加混凝土管道梁單元節點上的載荷的方法。首先,在HyperMesh中使用Renumber工具將管道梁單元的節點ID與自身ID按混凝土輸送方向依次重新編號。然后,將管道梁單元導出的節點ID、節點全局坐標和單元ID導出至文本文件中,并使用數據處理軟件,如Matlab,讀取這些信息,這些信息被用于計算每個單元的方向余弦αei,同時計算每個管道梁單元所受的實時沖擊力Fei。最后,使用式(10)計算每個單元在全局坐標系X/Y/Z 3個方向沖擊力的分量,即
(10)

(11)
(12)
為便于加載,每個單元的沖擊力施加在該單元的第二個節點處,使用Matlab軟件將這些載荷信息寫出文本文件后導入至整機有限元模型中即可完成載荷施加。需要注意的是,應保證速度模型與泵送測試壓力的周期起點相同,即推送速度與泵送油壓關系對應。
3 實驗與仿真
混凝土泵車整機實驗測試是為了獲取整機位姿以及泵送油壓等參數,為有限元動態仿真提供重要信息,也是為了獲取泵車整機動態響應(位移、位移振幅、動應力等)。測量混凝土泵車施工作業的位姿參數,包括混凝土泵車支腿展開角度、轉臺角度以及各節布料桿臂與水平面的夾角,為有限元分析提供整機姿態參數;測試混凝土泵的供油壓力動態曲線,為計算混凝土泵送沖擊載荷提供參數,同時還可以獲取到其推送混凝土的周期,為混凝土流動速度模型提供速度變化的時間周期;測試獲得泵車施工過程中的動應力及臂架末端相對初始靜止位置的垂直方向的位移量(以下簡稱位移量)隨時間變化曲線,可以將其與仿真結果對比,檢驗文中提出的研究方法的正確性。實驗中擬定采用恒定泵送單位在3種姿態下的混凝土泵車進行測試,將C30新拌混凝土作為泵送原料。
3.1 實驗測試
3.1.1 整機位姿與泵送油壓測試


圖11 隨車智能監測平臺測試項目示意圖Fig. 11 Onboard intelligent monitoring system
3.1.2 位移與動應力測試
位移與動應力測試主要是測量臂架末端位移量與臂架動應力,對這兩個項目進行測試時,需搭建位移與動應力測試平臺。
1)臂架末端位移量測試。混凝土泵車臂架的振動可以看作是懸臂梁結構的受迫振動,臂架末端位移采用拉線位移傳感器進行測試。將拉線位移傳感器固定于臂架末端,并將拉繩一端固定于地面,使拉繩垂直于地面方向,其測得的振動是臂架末端垂直于地面方向的位移量。
2)動應力測試。選取合作企業中工程師統計的混凝土泵車結構常發生疲勞開裂等破壞位置進行測試,測點布置示意圖如圖12所示。由于梁彎曲主要是軸線方向的拉伸或壓縮,應力測試實驗采用單向應變片對箱梁軸向方向的正應力進行測試。

圖12 臂架應力測點布置示意圖Fig. 12 Positions of stress test points in booms
各應變片沿箱梁軸線方向布置均與側板邊緣相距50mm,為保證應變片能夠長期使用,采用了金屬殼體進行封裝。應力測試現場照片如圖13所示。
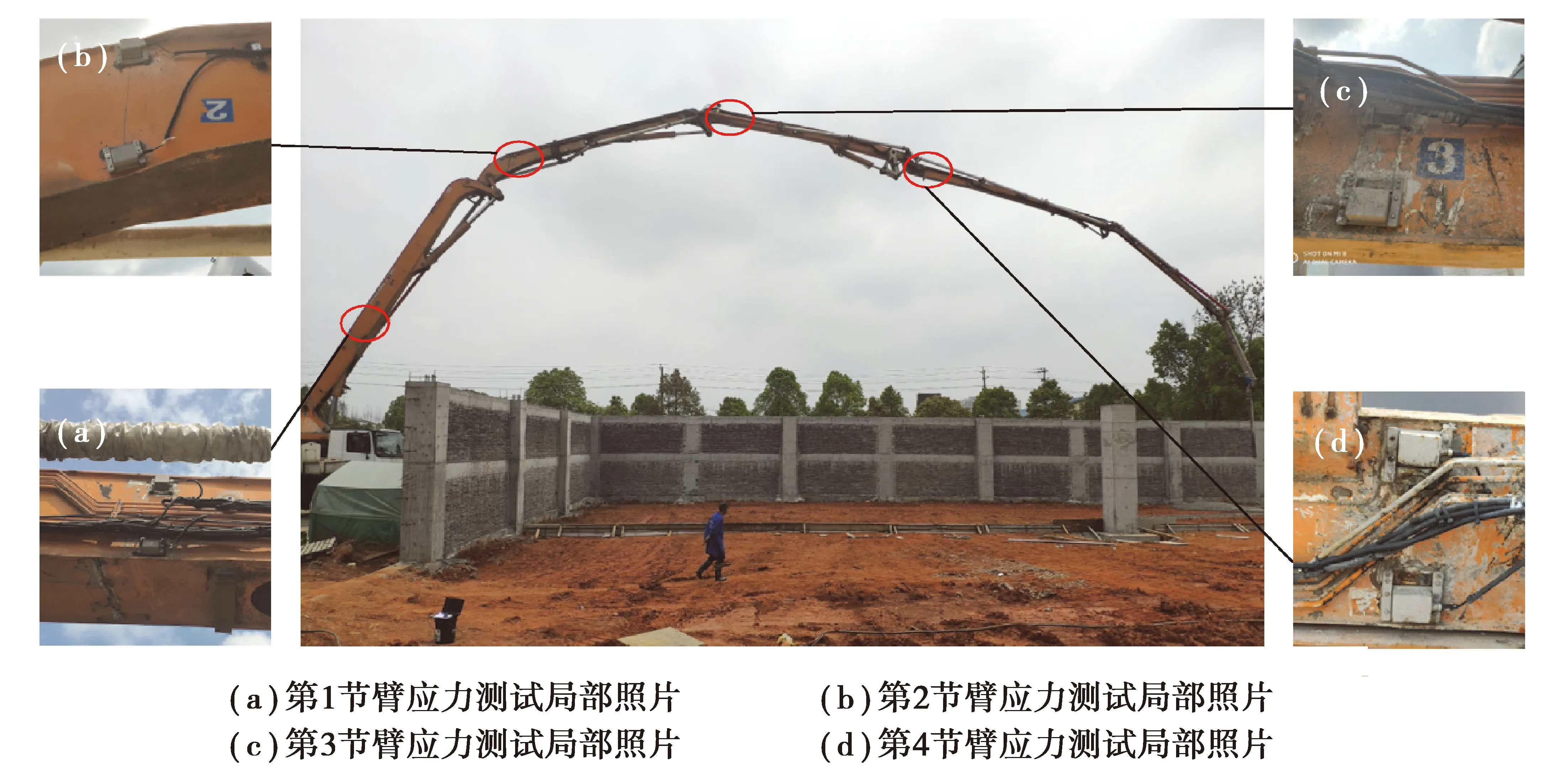
圖13 應力測試現場照片Fig. 13 Stress test site
利用電纜線進行位移量與應力測試數據的信號傳輸,采用NS-DAC3000單通道數據采集系統和筆記本電腦對拉線位移傳感器的信號進行實時采集、示波與存儲。采用一臺DRA-30A多通道動靜態應變儀采集8個應力測點的應變數據,并通過USB接口與計算機通訊。另外,還需一臺筆記本電腦與加速度傳感器配備的無線網關連接進行USB串口通信。每種測試項所使用的儀器都有該設備配套的控制軟件,可以清晰直觀看到各通道信號的實時變化,也可以隨時控制數據采集的開始與結束,因此很容易實現各種信號的同步采集或間斷采集。
實驗中所采用C30新拌混凝土的坍落度約為0.18 m。通過對澆筑用料體積和澆筑時間的統計,計算出澆筑過程中泵送方量Q為85m3/h。
3.2 測試結果及對比
3.2.1 整機位姿與泵送油壓測試結果
由于實驗場地限制,測試時,混凝土泵車的左后支腿未完全展開,右后支腿和前支腿完全伸展到極限位置。3種測試姿態下,轉臺轉角位置略有不同,實驗場地有磚墻,導致3種姿態的第1節臂都有較大角度地抬起。3種測試姿態如圖14所示,依據泵車姿態將其命名為類水平姿態、弧形姿態和M形姿態。

圖14 混凝土泵車澆筑作業姿態Fig. 14 Concrete pump truck pouring operation posture
將應變片讀數值在臂架豎直姿態下做清零處理,每進行姿態調整后,應停機等待2 min左右,使臂架由于姿態調整而產生的振動消除,以便能準確測量出臂架位姿參數(包括轉臺轉角和各節桿臂傾角),并且此時可以采集到臂架振動位移幅值衰減過程變化規律信息,通過計算得到結構阻尼比。振動衰減過程中的對數衰減率計算公式為
(13)


(14)
外搭測試平臺記錄混凝土泵車停機過程中,臂架末端的振動幅值衰減過程如圖15所示。

圖15 停機時臂架末端振位移幅值衰減曲線情況Fig. 15 Vibration displacement amplitude of boom tip in stopping period
臂架末端振動加速度曲線波動劇烈,難以準確取值。因此選取振動位移幅值進行計算:振動位移幅值由228 mm衰減為19 mm經歷了7個周期,計算出混凝土泵車結果阻尼比為ζ=0.056,該值可以為有限元瞬態分析提供可靠的結構阻尼比。
3種姿態在澆筑作業開始前的靜止狀態時,混凝土泵車的下車位姿測試結果和臂架位姿測試結果如表2所示。
表2 混凝土泵車位姿角度參數
Table 2 Angles and inclination parameters of concrete pump truck ()

表2 混凝土泵車位姿角度參數
工況右后支腿展開角左后支腿展開角轉臺角度第1臂傾角第2臂傾角第3臂傾角第4臂傾角第5臂傾角第6臂傾角類水平姿態56.020.0171.937.2-5.1-8.9-10.8-12.9-14.2弧形姿態56.020.0171.959.120.1-10.4-12.4-40.5-66.6M形姿態56.020.0185.567.028.3-52.625.2-81.3-80.3


圖16 混凝土泵車供油路壓力Fig. 16 Oil supply pressure of concrete pump truck
3.2.2 仿真與實驗結果對比
利用測試獲得的混凝土泵車位姿參數及泵送油壓曲線等關鍵信息,對整機有限元模型進行姿態調整,并完成邊界條件的施加,便可以進行有限元求解計算及后處理。實驗測試與有限元仿真的主要對比指標為臂架末端位移量與臂架測點應力,以下將進行這2個指標的結果對比。
1)臂架末端位移量對比。拉線位移傳感器測得的臂架末端垂直地面方向的位移量與有限元仿真分析模型的全局坐標系Y軸方向的位移結果含義一致,臂架末端位移量隨時間變化曲線如圖17所示,根據曲線對比可知,有限元仿真獲得的臂架末端位移量與實驗測試結果在每個周期內的波動幅度與波動規律基本相同,兩者間存在較小差異。

圖17 臂架末端位移量Fig. 17 Vibration displacement of the boom tip
2)動應力對比。圖18展示了測點1在實驗測試全時段的正應力曲線,可以看出:混凝土泵車澆筑時,測點動應力存在常值應力與循環應力2種組分,且循環應力組分與常值應力比值較小。為使動應力對比更清晰,可將應力結果的比較轉化為常值應力和循環應力2種應力組分的比較。

圖18 測點#1全時段正應力Fig. 18 Measuring point #1 full-time normal stress
a.常值應力組分對比。將3種姿態的仿真應力與測試應力的常值進行提取與統計,繪制的柱狀對比圖如圖19所示,一方面,仿真應力與實驗測試應力的常值組分基本吻合;另一方面,測試應力與仿真應力差值較大的測點在3種姿態下相差的趨勢相同,尤其以#1測點、#4測點和#8測點最為明顯,其最大相差值接近實驗測試應力的25%。

圖19 各測點仿真與實驗常值應力對比Fig. 19 Comparison of normal stress between simulation and experiment at each measuring point
b.循環應力組分對比。對于混凝土泵車3種姿態澆筑時的循環波動組分的對比,將循環波動的平衡點置零進行直觀比較。3種姿態下,各測點應力響應的循環應力組分曲線如圖20所示。仿真與測試得到的應力循環組分變化趨勢及幅度基本相同,且仿真的循環應力組分較測試應力的循環應力組分相比,更為光滑。另外,從3種姿態的仿真與測試結果還可以看出:類水平姿態和弧形姿態的位移振幅與應力的仿真結果與M形姿態相比更接近實驗測試結果。

3.3 誤差分析
分析泵車實際受載、實驗測試過程等與仿真之間的差異,可以找出仿真應力與測試應力之間差異的主要原因。
有限元仿真的位移量與測試結果的誤差主要來自兩方面:1)仿真計算時,采用的沖擊載荷每個周期完全相同,然而混凝土泵車實際受到的載荷在每個推送混凝土周期內存在波動,并且可能受到不確定的風載荷的干擾,因而每個周期的波動略有不同;2)采用拉線位移傳感器測試時,由于臂架末端并不只做豎直方向的運動,因而導致測試結果與實際相比偏大,與仿真結果存在一定誤差。
有限元仿真的應力結果與測試結果中的常值組分存在差異的原因有:1)測試中的臂架傾角是受重力作用下各節臂中點附近切線與水平面的夾角,與有限元模型具有一定差異。2)實際的測點位置和貼片方向與仿真應力結果提取時位置和方向具有一定差異。由于每個測點都采用單向應變片測試該點處沿桿臂箱梁軸線方向的正應力,且位于箱梁兩側,貼應變片時,其距離上下蓋板的距離以及是否嚴格平行于箱梁軸線難以準確保證。3)由于混凝土泵車穩定澆筑狀態下,各測點應力常值部分均存在一定的不確定漂移,推測可能受到一定的風載荷影響。而應力響應的循環組分存在差異的主要原因有:1)沖擊載荷平穩性差異。仿真計算采用的沖擊載荷連續且平滑,從測試泵送油壓結果可以看出混凝土在管道內的摩擦沖擊應是不平穩且有不確定性的尖刺,這是測試的循環應力組分的尖刺明顯多于仿真結果的主要原因。2)測點循環應力組分每個周期的幅值范圍存在差異主要由測點貼片位置和方向引起。3)混凝土泵車澆筑作業過程中,各節彎頭處存在不確定性的堵塞,且堵塞度及其引起的沖擊在文中所建立的沖擊載荷模型中未加以考慮。
類水平姿態和弧形姿態與M形姿態相比更貼近實驗測試結果的原因可能在于:在混凝土沖擊載荷建模時,將混凝土在管道中的流動狀態都視作柱塞流,而實際則可能在彎道處發生塞管,在負傾角管道中發生離析,這導致了與實際情況的差別。
4 結 論
通過文中建立的泵送沖擊載荷模型,對混凝土泵車進行了整機的有限元動態仿真,并進行了3種典型姿態下的混凝土泵車施工過程中實驗測試驗證,得到有限元動態仿真計算得到的動態響應結果與實驗測試結果兩者的變化規律及變化趨勢完全吻合。這可以表明:
1)沖擊載荷模型符合混凝土泵車實際工作受載情況,通過與有限元動態仿真結合,可以準確預測混凝土泵車整機作業過程中的振動情況,并且能夠準確反映出混凝土泵車穩定澆筑作業過程中整體的應力變化情況。
2)研究所使用的分析方法對于混凝土泵車澆筑時的振動響應具有針對性,并且能夠為混凝土泵車結構件強度優化設計及整機疲勞提供可靠的應力載荷譜。
3)在混凝土管道比較平直的姿態下,使用本文的方法模擬出混凝土泵車定姿態澆筑作業時的結構動力響應更加準確。相鄰臂架有很大轉角變化時,混凝土在彎道處發生塞管、在負傾角管道中發生離析的特性應該單獨考慮,不可忽略。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
現代裝飾(2022年5期)2022-10-13 08:48:04
建材發展導向(2022年10期)2022-07-28 03:04:00
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
水利規劃與設計(2020年1期)2020-05-25 08:01:30
小哥白尼(趣味科學)(2019年3期)2019-06-17 11:57:44
光學精密工程(2016年6期)2016-11-07 09:07:19
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
