基于激光點云的輸電線路桿塔傾斜檢測算法
2022-04-25 07:14:04徐梁剛陳鳳翔王時春
激光技術 2022年3期
關鍵詞:檢測
徐梁剛,時 磊,陳鳳翔,王時春,龍 新,王 迪
(1.貴州電網有限責任公司 輸電運行檢修分公司,貴陽 550002;2.中國電建集團 貴州電力設計研究院有限公司,貴陽 550081)
引 言
桿塔是承載輸電線路安全運行的重要基礎設施,受桿塔基礎開裂、滑動、沉降以及導線應力不均衡的影響,桿塔易發生變形與傾斜。桿塔的傾斜現象將導致導線應力以及電氣設備安全距離的改變,情況嚴重時電網將發生跳閘、斷線以及倒塔等安全事故,造成巨大的經濟損失和安全威脅。在輸電線路運行維護工作中,如何解決桿塔傾斜問題,及時而準確的檢測一直是運維工作人員的關注重點。現行的解決方案有兩種:一是人工巡檢方式,通過人工攜帶測量儀器的方式進行實地測量,作業繁瑣,工作量大;二是在線監測方式,通過在桿塔上加裝監測裝置的方式,實現了對桿塔傾斜的實時檢測,但是需要在每一階桿塔上安裝監測設備,設備成本高,同時監測設備的供電、通訊以及維護也是電網運維的工作難點。
隨著激光雷達(light detection and ranging,LiDAR)技術在輸電線路運維領域的不斷深化應用,機載LiDAR巡檢成為了輸電線路巡檢周期性的工作。目前已有大量學者開展點云數據在電力應用方面的算法研究[1-13],但基于點云數據進行判定桿塔傾斜度的研究較少。2016年,CHEN利用塔身四棱臺的結構特征,將塔身點云投影到垂直于水準面的各個方向上,使用凸殼算法對桿塔側棱點進行提取,進而實現機載LiDAR桿塔點云的傾斜檢測,但該算法將桿塔點云中最低點以上2m~15m之間的點云視為塔身點云,無法自適應過濾高低腿以及塔頭的影響,算法魯棒性較差[14]。2017年,SHEN提出了基于地面3維激光雷達實現輸電線路桿塔傾斜度測量的新方法,搭建了試驗系統,證明了點云數據進行桿塔傾斜測量的可行性,但該方法需要手動確定塔角點,未實現自動檢測[15]。
為解決目前基于LiDAR點云桿塔傾斜檢測方法魯棒性低、自動化程度差等問題,本文中利用桿塔塔身結構呈標準四棱臺的特點,提出一種基于桿塔塔身分層投影提取中軸點的激光點云桿塔傾斜檢測算法,利用桿塔分層點云計算最小外接矩形,提取桿塔中軸點,通過空間直線擬合算法確定桿塔中軸線來進行桿塔傾斜度檢測。首先,將桿塔點云沿高程方向進行分層,求取分層點云的最小外接矩形,確定外接矩形中心為桿塔中軸點;其次,在中軸點偏移的檢測與剔除中,一是利用外接矩形的面積、比例變化來過濾塔頭、高低腿等外接矩形中點與實際中軸點偏移的分層點云,二是利用外接矩形四邊內切點高程值剔除存在缺點、噪點的分層點云,在桿塔中軸線擬合之前剔除可檢測的偏移點;最后,在桿塔中軸線擬合階段引入抗差估計,通過選權迭代的方式抑制其余偏移點對桿塔中軸線擬合的影響。實驗結果證明,本方法利用機載激光LiDAR點云數據進行桿塔傾斜檢測具有較強的魯棒性,與全站儀實測結果殘差最大不超過0.90‰。
1 基于桿塔塔身分層投影提取中軸點的輸電線路桿塔傾斜檢測方法
1.1 桿塔點云結構分析
桿塔塔形是影響點云數據進行桿塔傾斜檢測的主要因素,輸電線路桿塔按形狀可分為干字塔、酒杯型以及鼓型塔等多種類型。為了增強本文中算法的普遍適用性,在考慮桿塔塔形因素的基礎上,進一步考慮點云密度、桿塔高低腿兩種因素,列舉以下3種桿塔點云實例進行桿塔結構分析,如圖1所示。

Fig.1 Structure diagram of representative tower point cloud
桿塔整體可分為塔頭、塔身、塔腳三部分,由圖1可以看出,各類型桿塔塔身部分統一表現為四棱塔結構,其中軸線與桿塔整體的中軸線重合,而塔頭、塔腳部分由于橫擔、高低腳的存在,其空間結構并不嚴格對稱。圖2為上述桿塔塔腳、塔身、塔頭部分沿高程方向上分層俯瞰圖,分層厚度為1m。

Fig.2 Hierarchical aerial view of representative tower point cloud
從圖2可知,無論點云的稠密程度,塔腳(除開高低腳部分)、塔身部分點云結構都符合嚴格對稱結構。本文中對塔腳(除開高低腳部分)、塔身部分的分層點云取最小外接矩形,結果如圖3所示。

Fig.3 Minimum circumscribed rectangle diagram of stratified point cloud of representative tower
從圖3可以看出,塔身部分的分層點云的最小外界外接矩形的4個頂點位于桿塔側棱上,矩形中心點位于桿塔中軸線上。
綜上所述,桿塔點云具有以下3個特征:(1)塔身分層點云嚴格對稱結構,外接矩形大致呈正方形分布,而高低腿符合線或點分布;(2)塔身分層點云最小外接矩形面積從下至上不斷變小;(3)塔身分層點云外接矩形中點為桿塔中軸點。
1.2 基于分層最小外接矩形的桿塔中軸點提取
根據桿塔點云的分層特征,本文中提出一種通過求解桿塔分層點云在xOy平面上投影的最小外接矩形確定桿塔中軸點的中軸點提取算法,詳細步驟如下。
(1)桿塔點云分層。提取桿塔點云最低點高程值hmin,按步長k=1m,以hmin為起點沿高程方向從下至上將桿塔點云按層分割,得到分層點云集合{Φ1,Φ2,…,Φn},其中n為首次分層的桿塔分層總層數。
(2)計算最小外接矩形[16]。求解點云Φi在xOy平面投影后平面點集的最小外接矩形Ri,其頂點為(Pi,1,Pi,2,Pi,3,Pi,4),長寬面積分別為Li,Wi,Si。
(3)提取塔身點云。由于高低腿與塔頭、塔身不同,其分層點云最小外接矩形中心不一定在桿塔中軸線上,本文中利用塔身分層點云最小外接矩形面積從上到下遞增,且基本呈正方形的特征,通過外接矩形的長寬比以及面積變化來剔除桿塔高低腿與塔頭的分層點云。令i=1,對分層點云Φi進行塔身檢驗,判斷條件為:

(1)



1.3 基于抗差估計的桿塔中軸線擬合
上面雖然在提取中軸點的過程中對提取中軸點偏離桿塔實際中軸線的情況進行了過濾,但部分誤差仍然不可避免,不能確保提取的中軸點點集全部符合實際中軸線分布。因此,本文中采用抗差估計理論,通過選權迭代的方式,在桿塔中軸線擬合過程中自適應降低中軸點點集中偏移點在中軸線擬合中的權重,達到抑制剩余偏移點對中軸線擬合影響的目的[17-18]。
將桿塔中軸線方程分解為xOz和yOz兩平面的投影直線方程,如下所示:

(2)
式中,a1,a2和b1,b2分別為xOz和yOz平面桿塔中軸線投影直線參數。設桿塔中軸點集為Pset{P1,c,P2,c,…,Pq,c},其中q為中軸點集的點數,則桿塔中軸線方程系數矩陣、權陣以及殘差矩陣如下:

(3)

v=BX-L
(4)
常規最小二乘擬合是求解殘差陣v在vTPv最小情況下的最優解,當偏移點混入點集Pset中時,最小二乘擬合結果將偏離真值。抗差估計在迭代計算過程中對殘差值v進行粗差檢驗,降低粗差觀測值的權重,在點集Pset存在部分偏移點的情況下仍然能保證擬合結果穩健可靠。本文中使用的權因子公式如下所示[19-20]:

(5)

基于抗差估計理論的桿塔中軸線擬合具體流程如下。
(1)開始迭代計算,令迭代次數l=1,計算參數矩陣與殘差矩陣如下:
(6)
(2)計算單位權與殘差中誤差,計算公式見下:

(7)
式中,r為自由度。
(3)通過權因子公式計算權因子矩陣[ω1ω2…ω2k],調整權陣P[j,j]←P[j,j]ωj。
(4)令l=l+1,重復步驟(1),重新計算矩陣X(l)和v(l)。
(5)重復步驟(2)~步驟(4),直至滿足以下迭代條件,方結束擬合過程,X(l)為擬合結果。
‖X(l)-X(l-1)‖<ε
(8)

2 實驗分析
2.1 算法魯棒性實驗
為驗證本文中提出的輸電線路桿塔傾斜檢測方法魯棒性,從塔型與點云密度、桿塔存在噪點與缺點兩種情況進行魯棒性論證。
2.1.1 塔型與點云密度魯棒性實驗 在實際激光LiDAR巡線中,由于飛行搭載平臺、飛行高度以及使用LiDAR設備的差異性,輸電線路通道點云的密度并不一致,同時架空輸電線路現存的桿塔樣式各異,形態特征不一,為基于激光點云的桿塔傾斜檢測中軸點確定造成極大困難。因此,本文中選取了主網具有代表性的3種桿塔類型,并同時考慮高低腳、點云密度因素的影響,設計了以下3種方案,對塔型不同與點云密度各異情況下驗證基于最小外接矩形中軸點算法的魯棒性。
(1)方案一。塔型:干字塔;點云密度:高;有高低腿;(2)方案二。塔型:酒杯塔;點云密度:高;無高低腿;(3)方案三。塔型:鼓型塔;點云密度:底;無高低腿。圖4~圖6中各矩形頂點的高程值設置為四邊頂點高程均值。

Fig.4 Axis point extraction in scheme 1
由圖4~圖6可以看出,本文中提出的基于分層最小外接矩形的桿塔中軸點計算方法,針對主網幾種具有代表性的塔型,在各種點云密度下能夠正確提取塔身點云,自適應過濾高低腳、塔頭部分點云對中軸點計算的影響;通過分層點云最小外接矩形確定桿塔中軸點的方式,能夠在點云不存在噪點、缺點的情況下正確計算桿塔中軸點。

Fig.5 Axis point extraction in scheme 2

Fig.6 Axis point extraction in scheme 3
2.1.2 點云缺點與噪點魯棒性實驗 激光LiDAR數據采集時由于飛行路線、環境因素的影響,輸電線路桿塔激光點云不可避免存在噪點、缺點情況。針對桿塔點云存在噪點、缺點情況采取了以下3個措施:第一,針對點云缺點引起的缺角情況,最小外接矩形計算正確僅需分層點云的3個四棱頂點存在,桿塔任意一角缺失不影響算法計算結果的正確性;第二,針對點云存在噪點、缺點導致最小外接矩形傾斜情況,增加矩形四邊內切點高程驗證加以控制過濾;第三,針對其余因點云存在噪點、缺點導致桿塔中軸點偏移情況,通過中軸線擬合中增加抗差估計,抑制偏移點在直線擬合中的影響。下面分別對以上3種措施進行實驗分析。
(1)桿塔角缺。利用干字塔(高密度、高低腿)點云,人工進行點云切角處理,對缺角情況下桿塔中軸線提取進行模擬分析,分層最小外接矩形以及中軸點計算結果如圖7所示。

Fig.7 Experimental results of missing angle of tower
桿塔缺角是由于塔身自身遮擋引起的,搭載在飛行平臺進行點云數據采集時,僅可能存在一個塔角在盲區內,桿塔點云同時存在兩個角缺失的情況較少。由圖7可以看出,在缺一角情況下并不影響分層最小外接矩形進行桿塔中軸點提取,在缺兩角情況下桿塔中軸點才會引起較大偏差,因此本算法在桿塔存在缺角情況下具有較強的魯棒性。圖8是缺一角情況下中軸點整體提取效果。
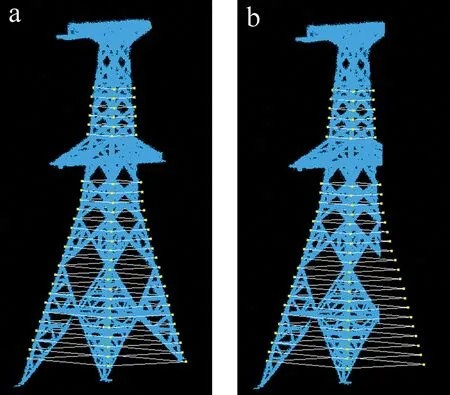
Fig.8 Overall effect of the experiment of missing angle of tower
(2)分層最小外接矩形傾斜。利用干字塔(高密度、高低腿)點云某一分層點云,人工進行增加噪點、刪點處理,對點云存在噪點、缺點情況下外接分層最小外接矩形傾斜情況進行模擬,為了便于直觀展示矩形傾斜的效果,將錯誤內切點的高程值作為其對應邊端點高程值。
從圖9~圖11中可以看出,由于點云存在噪點和缺點情況,最小外接矩形與點集的內切點發生變化,當錯誤的內切點高程值與其余內切點不同時,導致分層最小外接發生傾斜,矩形中心點偏離桿塔中軸點。換言之,當分層最小外接傾斜時,該層點云必然存在點云噪點和缺點情況,并且影響了最小外接矩形的計算,導致了計算出的中軸點與實際發生偏移。從側視圖可以看出,利用矩形四邊與點集的內切點高程值進行高程一致性檢驗,能夠有效識別出外接矩形是否存在傾斜情況,在桿塔中軸線擬合之前剔除可檢測的偏移點。

Fig.9 Results of rectangle tilt test under normal conditions

Fig.10 Experimental results of rectangle tilt under noisy conditions

Fig.11 Experimental results of rectangular tilt in the case of defects
(3)部分提取中軸點偏移。盡管本文中提出算法利用對最小外接矩形傾斜判斷過濾了大部分偏移點,但仍存在少數極端情況無法避免。如圖12所示,噪點明顯影響了分層最小外接矩形的計算,但由于噪點本身高程值與其余內切點一致,利用高程差值無法對是否存在噪點進行判斷過濾。因此,在桿塔中軸線擬合中引入抗差估計以抑制離群點在直線擬合中的影響,為驗證抗差估計在桿塔中軸線擬合中抵抗偏移點影響的效果,選取一組桿塔中軸點,設計以下方案:方案一,選取一組同時存在可檢測偏移點以及不可檢測偏移點的桿塔中軸點;方案二,在方案一的基礎上進行傾斜檢測,過濾可檢測偏移點;方案三,在方案二的基礎上通過人工判斷,過濾所有偏移點。上述3種方案中軸點同時進行最小二乘擬合與抗差估計擬合,結果如圖13所示。

Fig.12 Schematic diagram of a few minimum circumscribed rectangles unable to detect center point offset
圖13中,方點代表正確中軸點,圓空心點代表可使用傾斜矩形驗證過濾的偏移點,圓實心點為剩余偏移點,實線為抗差估計結果,虛線為最小二乘結果。為直觀展示最小二乘與抗差估計擬合效果的差異,圖13中采用側斜方視角。由圖13可以看出,在不存在偏移點的情況下最小二乘擬合與抗差估計擬合均能得到正確結果,但隨著偏移點增加,最小二乘擬合易受偏移點的影響偏離正確值,而抗差估計在正確點占大比例時,能夠有效抑制離群偏移點在直線擬合中的影響,保持擬合結果的正確性。

Fig.13 Fitting results of three schemes under least squares and robust estimation
因此,利用分層最小外接矩形內切點高程差值在直線擬合前對大多數可檢測偏移點進行過濾,保證正確中軸點在整個中軸點集中占大比例,再利用抗差估計對剩余偏移點進行抑制,在存在噪點與缺點情況下盡可能提高桿塔傾斜檢測結果的正確性。
2.2 實測對比實驗
為驗證本文中提出的桿塔傾斜算法的實用性,利用全站儀實測了貴州某一220kV線路連續20級桿塔的傾斜度,并采用AS-300HL多平臺激光雷達系統對此20級桿塔進行點云數據采集,平面精度5cm,高程精度5cm。表1為對比結果。
本文中采用高精度檢驗方法,將觀測精度更高的全站儀測量值視為桿塔傾斜真值,對凸殼算法以及本文中算法殘差值進行統計分析,從表1中可以看出,本文中提出算法檢測傾斜值更為接近真值,最大偏差為0.90‰,而凸殼算法最大偏差為2.27‰,因此本文中提出算法檢測具有更強的實用性。

Table 1 Results of measured comparison
3 結 論
本文中提出了一種基于桿塔塔身分層投影提取中軸點的輸電線路桿塔傾斜檢測方法,為利用輸電線路機載激光LiDAR數據實現桿塔傾斜檢測提供了一種新算法。
(1)提出了基于分層最小外接矩形的桿塔中軸點提取方法,針對不同塔型,在各種點云密度下能夠正確提取塔身點云,自適應過濾高低腳、塔頭部分點云對中軸點計算的影響,能夠在點云不存在噪點、缺點的情況下正確計算桿塔中軸點。
(2)針對桿塔點云缺點與噪點,利用分層最小外接矩形內切點高程差值在直線擬合前對大多數可檢測偏移點進行過濾,保證正確中軸點在整個中軸點集中占大比例,再利用抗差估計對剩余偏移點進行抑制,能夠在點云存在噪點與缺點情況下盡可能保證桿塔傾斜檢測結果的正確性。
(3)經實測對比,本文中提出的桿塔傾斜檢測方法誤差在0.90‰以內,基本滿足實際應用需求,具有重要的實際意義。同時,本文中提出的桿塔傾斜檢測精度取決于點云精度,隨著機載激光雷達技術的進一步發展,點云密度以及精度進一步提高,本文中提出方法對桿塔傾斜的敏感度將進一步提高。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
