預埋光纖光柵傳感器的碳纖維復合材料螺旋槳水下動應變在線測試
2022-04-26 07:51:26雷智洋王春旭吳崇建丁國平嚴小雨
中國艦船研究 2022年2期
雷智洋,王春旭,吳崇建,丁國平,嚴小雨
1 中國艦船研究設計中心,湖北 武漢 430064
2 船舶振動噪聲重點實驗室,湖北 武漢 430064
3 武漢理工大學 機電工程學院,湖北 武漢 430070
0 引 言
船用金屬材料螺旋槳由于腐蝕、疲勞壽命等問題而備受困擾。碳纖維復合材料(carbon fiber reinforced plastic,CFRP)具有輕質高強、耐腐蝕、抗疲勞、可設計性等優點[1-2],為船用螺旋槳的性能提升帶來了新的契機,并得到了廣泛關注。
CFRP 螺旋槳與金屬螺旋槳最主要的區別在于復合材料槳葉能根據水動力載荷產生自適應彎曲變形和扭轉變形[3-4],復合材料的各向異性及彎扭耦合效應導致槳距發生變化,使得螺旋槳在非均勻流場中的水動力性能優于金屬槳;同時復合材料螺旋槳阻尼較大,有利于降低螺旋槳的振動和噪聲。為評估復合材料螺旋槳的性能,準確測試獲取CFRP 螺旋槳槳葉葉片變形、動應變和振動是復合材料螺旋槳研究設計的關鍵。
常規傳感技術面臨水下絕緣、流場干擾、信號傳輸等問題,螺旋槳在水下運轉狀態的工作變形和動應變測量一直是工程難題。常用應變測量方法是在螺旋槳表面粘貼應變片,由于螺旋槳處于水下運轉狀態,傳統應變片及傳輸線纜的尺寸和自重將對螺旋槳表面流場和水動力性能產生較大的影響,并且已有研究表明在槳葉表面粘貼應變片會加劇空泡效應[4]。
光纖光柵(fiber bragg grating,FBG)傳感器是一種新型光學傳感器,其傳感原理是通過光柵波長偏移實現對被測對象的應變或溫度的絕對測量,由于光纖傳感具有尺寸小、重量輕、一纖多點、抗電磁干擾、水下信號傳輸穩定等優點,而常規的光學成像法和電測法則不具備[5-6],因此,基于光纖傳感的螺旋槳水下工作變形和應變測試方法得到研究和關注。
Zetterlind 等[7]最早探討了在復合材料螺旋槳葉片中埋入FBG 傳感器進行應變測量的可行性分析;隨后,Zetterlind 等[8]使用法-泊光纖干涉傳感器(EFPI)在空氣中對復合材料螺旋槳葉片在恒定軸向載荷和循環彎曲載荷下的靜應變和動應變進行了監測,驗證了光纖傳感器在復合材料螺旋槳疲勞測試中的適用性;Wozniak[9]通過埋入FBG 傳感器對復合材料螺旋槳槳葉進行應變監測,探討如何將光纖從復合材料中引出的設計和工藝問題;Herath 等[10]通過在復合材料槳葉表面粘貼FBG 傳感器陣列對應變進行了測量;Javdani 等[11]使用FBG 傳感器陣列進行懸臂鋼質螺旋槳葉片試件的振動測試,并在此基礎上,在全尺寸的鋼質螺旋槳葉片上安裝FBG 傳感器陣列,進一步研究了螺旋槳在空氣中和水下的振動特性[12]。上述研究探索并驗證了將FBG 傳感技術用于復合材料及鋼質螺旋槳空氣中靜態應變測試的可行性和適用性,但較少涉及CFRP 螺旋槳在水下運轉狀態下的槳葉動態動應變實時在線測試。
本文將提出把FBG 傳感器預埋入CFRP 螺旋槳中,實現螺旋槳水下運轉狀態槳葉動應變在線測試。通過將FBG 傳感器預埋入CFRP 螺旋槳槳葉內部,制備預埋FBG 傳感器的CFRP 螺旋槳,構建CFRP 螺旋槳水下運轉狀態的動應變實時在線測試系統,開展多種運行工況下的CFRP螺旋槳水下運轉狀態槳葉動應變測試,掌握復合材料螺旋槳水下運轉狀態的動態應變特征,為CFRP 螺旋槳的流固耦合、水動力學性能研究及優化設計提供試驗支撐。
1 CFRP 螺旋槳結構
本文設計的預埋FBG 的CFRP 螺旋槳為分體式金屬預埋件槳葉結構,試驗螺旋槳分為3 個部分:金屬槳轂、金屬預埋件(5 個)、CFRP 槳葉(5 片),其結構如圖1 所示。
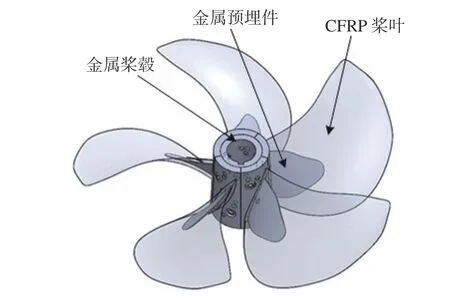
圖1 金屬-CFRP 槳葉結構Fig. 1 Metal-CFRP blade
該結構中金屬預埋件與CFRP 槳葉通過模壓成型而固化為一體(金屬-CFRP 槳葉),隨后通過螺釘和銷釘將其與金屬槳轂連接為一體。金屬預埋件槳葉結構的5 個金屬-CFRP 槳葉單獨制造而成,若某個槳葉有損壞,可方便更換損壞的槳葉,減少維護成本。CFRP 螺旋槳的材料選用中復神鷹碳纖維公司的FAW200RC36(T700系列)單向碳纖維預浸料,螺旋槳主要結構參數如表1 所示。
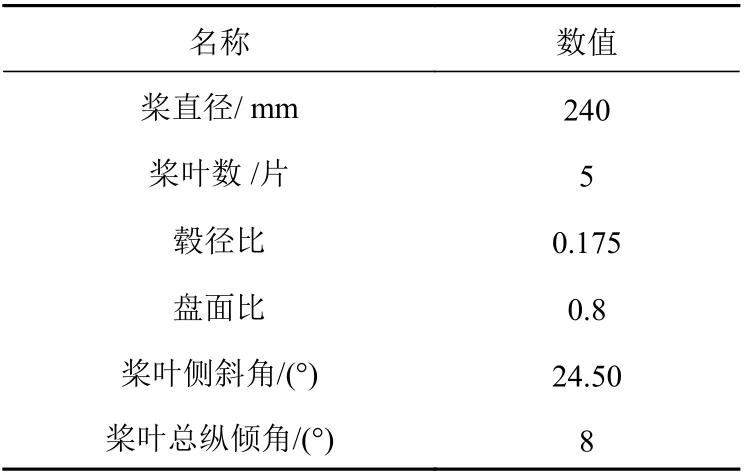
表1 CFRP 螺旋槳主要參數Table 1 Main parameters of CFRP propeller
2 預埋FBG 傳感器的CFRP 螺旋槳
2.1 FBG 的傳感原理及復用技術
FBG 傳感器的傳感原理如圖2 所示。入射光是包含多個波長的寬帶光譜,入射至光柵區域時,只有特定波長的光波反射,其他波長的光波則不受影響直接通過光柵位置繼續沿光纖傳播,反射光波的波長即為布拉格波長,波長表達式為
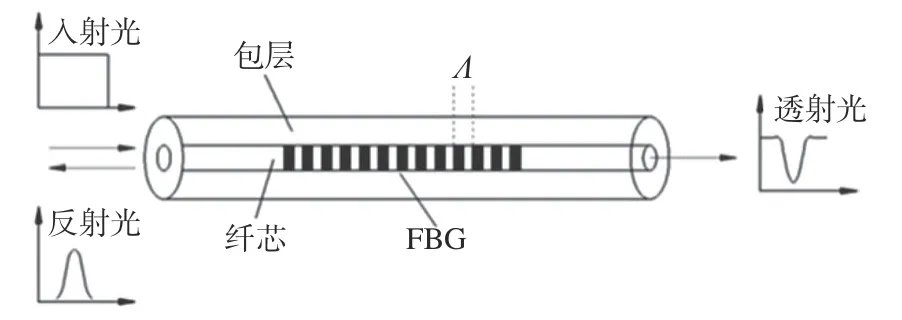
圖2 光纖光柵傳感原理Fig. 2 FBG sensing principle

式中: λB為 光纖布拉格光柵的反射波長; Λ為光柵的周期;neff為光柵的有效折射率。決定光柵反射波長的主要因素有 Λ和neff。當光纖光柵傳感器受到外力作用造成光柵區變形,引起光柵軸向應變的 變 化, Λ和neff也 隨 之 發 生 變 化,最 終 導 致 λB變化;當光柵所處溫度發生改變時,光纖材料發生熱膨脹或收縮產生應變,進而引起 λB的變化,同時,熱光效應也會引起光柵有效折射率的變化進而引起 λB的改變。
由式(1)可知光纖光柵中心波長的偏移量可表示為

由彈性力學及彈光效應、熱光效應、熱膨脹效應的理論,式(2)可改寫為

式中: ΔT為光纖布拉格光柵的溫度變化; α為光纖的熱膨脹系數; ξ為熱光系數; λB0為初始波長值;ε為光纖布拉格光柵的應變變化量;Pe為有效彈光系數,本文所用光柵為石英材質,因此Pe=0.22。
當光纖光柵傳感器處于恒定溫度場時,即ΔT=0,有

式中,Kε為光柵傳感器的應變靈敏度。從式(4)可以看出,在外界溫度不變的條件下,反射光譜中心波長的偏移只受光纖光柵傳感器所在應力場的變化影響,光柵在外部應力場的作用下,導致Λ 與neff改變,進而引起光纖光柵反射波長和反射光譜的變化。因此,通過監測 ΔλB,即可得到對應的應力應變信息,此為光纖光柵監測應力應變的基本原理。在相同條件下,由于光纖光柵的橫向靈敏度比縱向的小很多,因而在實際運用中通常只考慮傳感器的縱向應變,因此也只用光纖光柵來測縱向應變。
如圖3 所示,波分復用技術是光纖布拉格光柵傳感器最顯著的優勢之一:在一根光纖上寫入多個光柵,在解調儀或光譜儀可用的范圍內給每個光柵分配一個獨立的、不同的波長區間,各個光柵的反射波峰隨著被測量的變化在各自波長范圍內變化,采用一套解調裝置檢測所有光柵反射光譜形成的復合光譜,從預先分配的每一個獨立波長區間內得到每一個光柵的中心波長漂移量,從而實現一纖多柵、大規模、分布式測量。
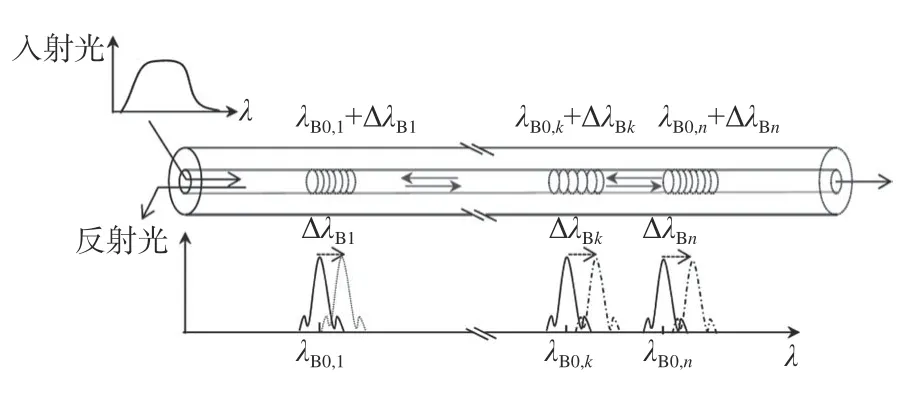
圖3 光纖光柵的波分復用技術原理圖Fig. 3 FBG wavelength-division multiplexing principle
2.2 預埋FBG 傳感器布局
預埋FBG 傳感器的布局位置主要考慮槳葉的鋪層厚度及應變分布。首先,FBG 傳感器直徑為0.125 mm,將FBG 傳感器預埋入CFRP 槳葉鋪層層間時,為避免分層開裂,傳感器處的鋪層厚度應大于傳感器直徑的10 倍以上;其次,FBG 傳感器應盡量布置在應變變化較為明顯的區域。根據上述考慮,確定FBG 傳感器在槳葉內的位置布局如圖4 所示。
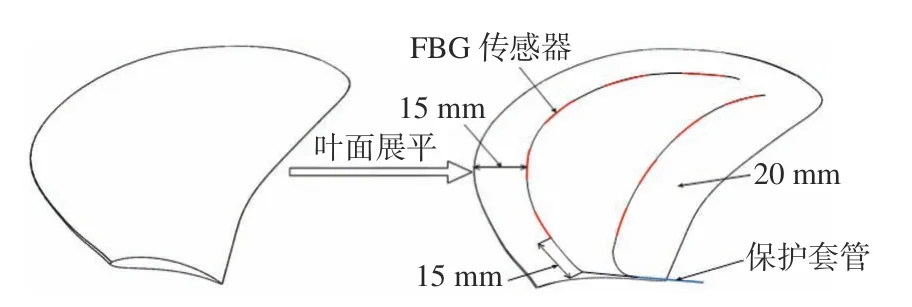
圖4 槳葉內預埋FBG 傳感器位置示意圖Fig. 4 Schematic diagram of the position of the FBG sensor in the blade
根據FBG 傳感器的預埋位置及應變測量范圍,定制了串接FBG 傳感器(FBG1 和FBG2),各傳感器的編號、中心波長配置及間距如圖5 所示,通過波分復用技術區分各個傳感器。
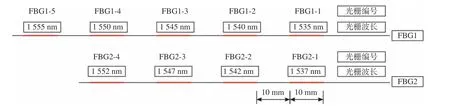
圖5 FBG 傳感器中心波長及間距Fig. 5 Center wavelength and distance of FBG sensors
CFRP 螺旋槳槳葉的葉面和葉背的鋪層形式一致,單邊鋪層角度由葉面向內為[0°2/ 45°2/ 0°2/45°2/0°2],其中“X°2”表示纖維鋪設方向為X°角,連續鋪設2 層;其鋪層編號依次為1~10,FBG 傳感器預埋在槳葉鋪層的第8 層和第9 層之間。
2.3 CFRP 螺旋槳的制備
預埋FBG 傳感器的CFRP 螺旋槳采用模壓成型工藝制備,成型后的預埋FBG 傳感器的CFRP螺旋槳如圖6 所示。

圖6 預埋FBG 傳感器的CFRP 螺旋槳Fig. 6 CFRP propeller with embedded FBG sensors
3 水下動應變測試
3.1 CFRP 螺旋槳水下應變測試系統
CFRP 螺旋槳水下動應變測試在武漢理工大學船模水池進行,通過拖曳水車帶動螺旋槳旋轉和前進,因此根據拖曳水車結構,設計CFRP 螺旋槳水下應變測試系統。測試系統結構如圖7 所示,主要包括拖曳水車、預埋光纖光柵的CFRP 螺旋槳、光纖滑環、轉子固定端、定子固定端、定子固定支架和光纖光柵波長解調儀。CFRP 螺旋槳安裝在拖曳水車轉軸上,螺旋槳的尾端安裝有光纖滑環,光纖滑環的轉子安裝在轉子固定端,通過螺紋連接螺旋槳尾端,滑環轉子隨螺旋槳一起旋轉。定子固定端用于安裝光纖滑環定子,通過固定支架與拖曳水車相連,同時將光纖牽引至光纖光柵解調儀,解調儀放置在水池岸邊。
根據圖7 所示的測試系統示意圖,在拖曳水車上按順序將預埋FBG 傳感器的CFRP 螺旋槳、轉子固定端、光纖滑環、定子固定端以及固定支架安裝于拖曳水車上,并將預埋的FBG 傳感器與光纖滑環轉子端光纖熔焊為一體,將定子端光纖連接解調儀,檢測安裝過程中光纖信號是否正常。其中,由于光纖滑環為單通道滑環,本試驗選擇了其中一條串接FBG 傳感器(FBG2)與光纖滑環連接,并將其信號傳輸至解調儀上。
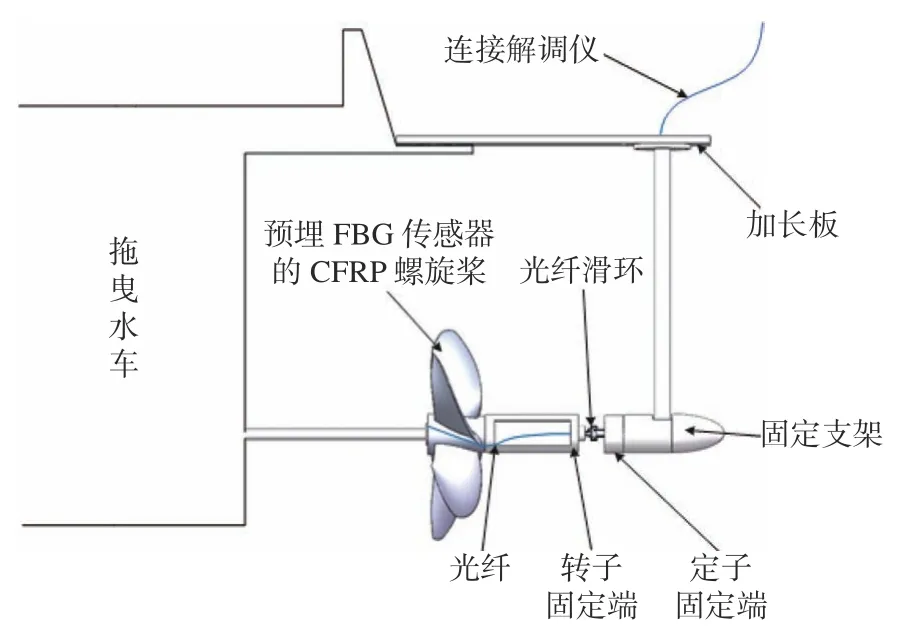
圖7 CFRP 螺旋槳水下動應變測試系統示意圖Fig. 7 Scheme of CFRP propeller underwater strain measurement system
在搭建水下應變測試系統的過程中,要保證轉子固定端、光纖滑環、定子固定端三者之間的同軸度,因為光纖滑環在測試時轉子端與螺旋槳同軸、同轉速,若轉子固定端和定子固定端安裝配合偏差過大,易導致滑環在工作時損壞。因此在搭建測試系統時需對定子固定端進行位置和角度調整,同時檢測光纖信號是否良好,確認無誤后方可進行測試。搭建完成的CFRP 螺旋槳水下動應變測試系統如圖8 所示。
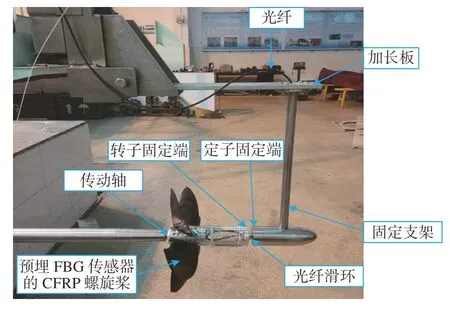
圖8 CFRP 螺旋槳水下動應變在線測試系統Fig. 8 CFRP propeller underwater strain measurement system
3.2 CFRP 螺旋槳水下動應變在線測試
螺旋槳在水下運行時,其轉速和進速是影響水動力性能的2 個重要參數,因此本文設置了轉速和進速分別變化的2 類工況,研究CFRP 螺旋槳在水下運行時的動應變特征。測試現場如圖9所示。
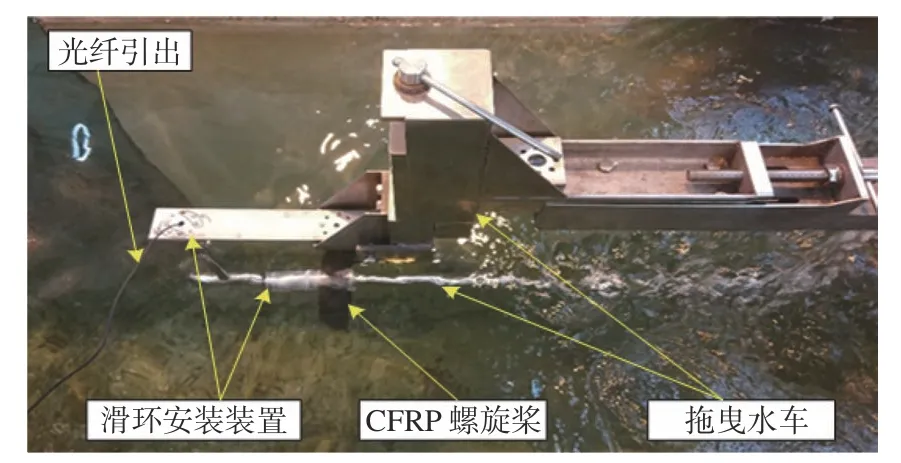
圖9 CFRP 螺旋槳水下動應變在線測試Fig. 9 CFRP propeller underwater strain online measurement
具體工況設置為:
1) 測試工況1。螺旋槳進速為0 m/s,轉速為50,100,150,······,400 r/min,以50 r/min 的間隔依次增加,共8 種不同轉速。在每種轉速工況穩定后,采集預埋的FBG 傳感器的數據,FBG 波長解調儀的采樣頻率為2 kHz。
2) 測試工況2。螺旋槳轉速為427 r/min,該工況數據采集分2 個階段:進速為0.0,0.2,0.4,······,1.6 m/s,以0.2 m/s 的間隔依次增加,共9 種進速,在每種進速工況穩定后,采集預埋的FBG 傳感器數據和CFRP 螺旋槳的水動力數據;當進速為1.8,2.0,2.2,2.4,2.6 和2.8 m/s 時,由于測試系統存在噪聲干擾,此時僅采集CFRP 螺旋槳的水動力數據。
3.3 試驗結果與分析
3.3.1 測試工況1
圖10(a)~圖10(b) 為 測 試 工 況1 中 在50 和400 r/min 轉速下預埋FBG 傳感器的應變時域曲線,該曲線呈現明顯的周期性,使用傅立葉變換,選用漢寧窗獲得動應變的頻譜圖,如圖10(c)~圖10(d)所示,其中APF為螺旋槳轉動的軸頻,其值為轉速除以60,r為轉速。工況1 中其他轉速下的應變時域圖及頻譜圖與50 和400 r/min 轉速的類似,此處不再贅述。
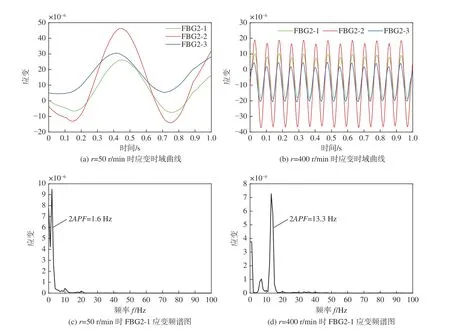
圖10 不同轉速下預埋FBG 傳感器的應變曲線Fig. 10 Embedded FBG sensors strain curves with different rotation speed
由圖10 中的動應變頻譜圖可以看出測試結果的信噪比較高,在特定頻率處有明顯峰值。表2統計了各FBG 傳感器在各轉速下的應變特征頻率及峰值。
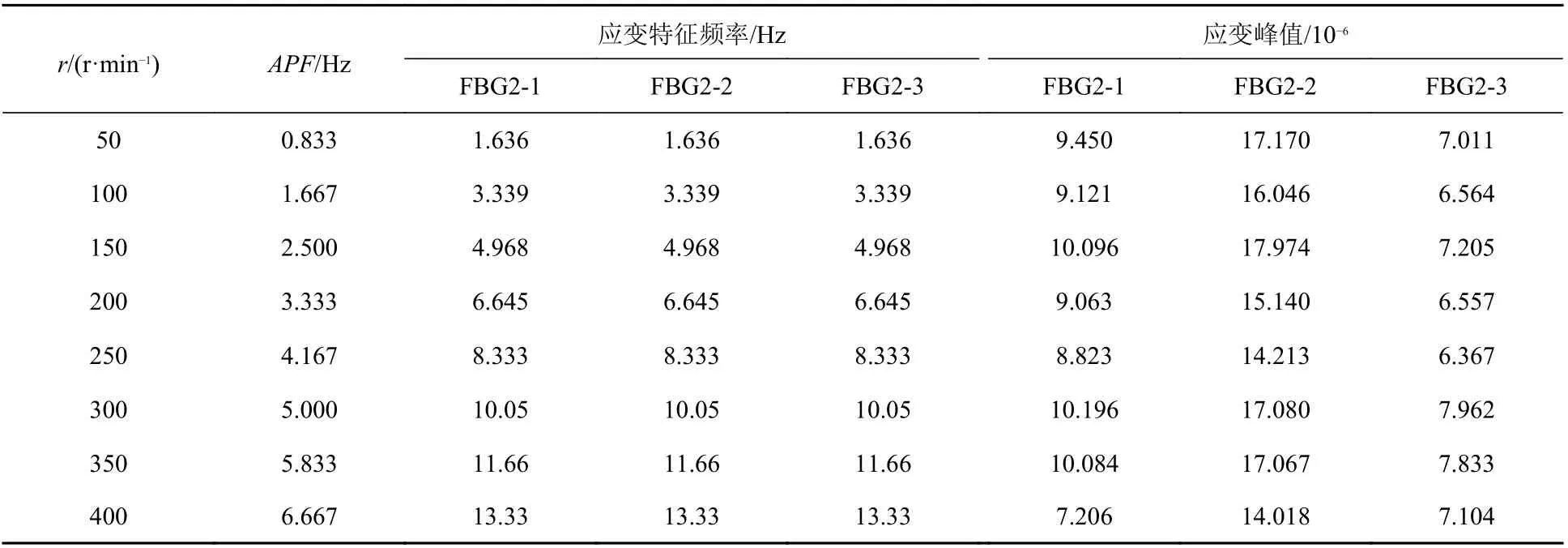
表2 不同轉速下CFRP 螺旋槳應變特征頻率與峰值Table 2 Frequency and amplitude of strain with different speeds
表2 中的結果表明,各個FBG 傳感器的應變峰值均出現在2 倍的APF處。經分析,可能是測試系統支架的影響導致來流不均勻、螺旋槳及軸存在不對中導致的。對FBG 傳感器的動應變峰值進行分析,在各轉速下,3 個FBG 傳感器的應變峰值的大小關系一致,即FBG2-2 的應變峰值最大,FBG2-3 的應變幅值最小。說明FBG2-2 傳感器處的應變和變形最大,FBG2-3 傳感器處的應變和變形最小。表明螺旋槳在水下運行時,槳葉不同位置的應變和變形不同,取決于螺旋槳的結構力學特征。
3.3.2 測試工況2
圖11 為螺旋槳轉速r=427 r/min,螺旋槳進速v為0.2 和1.6 m/s 時,FBG 傳感器的應變時域曲線和頻譜圖。工況2 中其他進速下的應變時域圖及頻譜圖與0.2 和1.6 m/s 進速的類似,此處不再贅述。表3 統計了各個FBG 傳感器在各進速下的應變特征頻率及峰值。
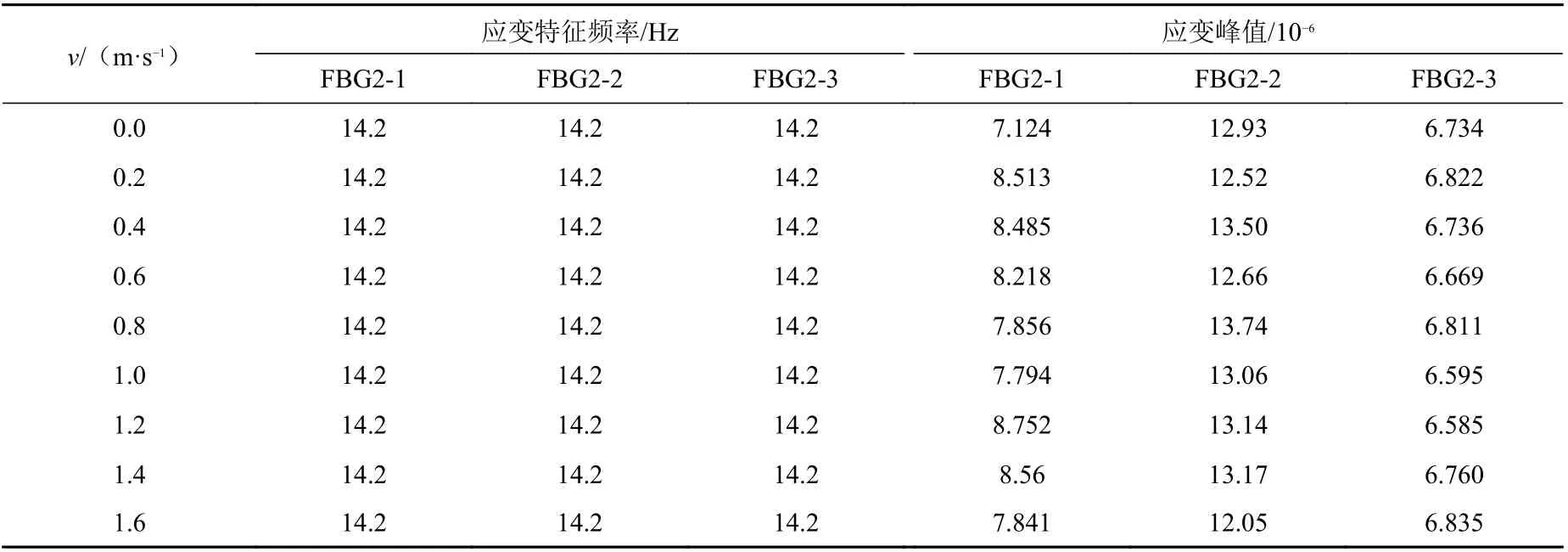
表3 不同進速下CFRP 螺旋槳應變特征頻率與峰值Table 3 Frequencies and amplitude of strain with different velocities
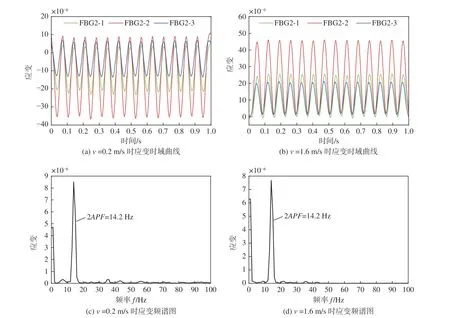
圖11 不同進速下預埋FBG 傳感器的應變曲線Fig. 11 Embedded FBG sensors strain with different velocity
表3 的結果表明,當轉速一定時,在各種進速下,3 個FBG 傳感器的動應變特征頻率保持14.2 Hz不變,仍然是2 倍的APF。3 個FBG 傳感器采集的動應變幅值仍然為FBG2-2 的應變幅值最大,FBG2-3 的應變幅值最小,與工況1 的測試結果一致。
測試工況2 中,當進速為0.0~1.6 m/s 時,同時采集FBG 傳感器的動應變數據和螺旋槳的水動力數據;當進速大于1.6 m/s 后,僅采集螺旋槳的水動力數據;繪制CFRP 螺旋槳在進速0.0~2.8 m/s的敞水特性曲線,如圖12 所示。圖中,KT為推力系數,KQ為扭矩系數,η 為螺旋槳效率。
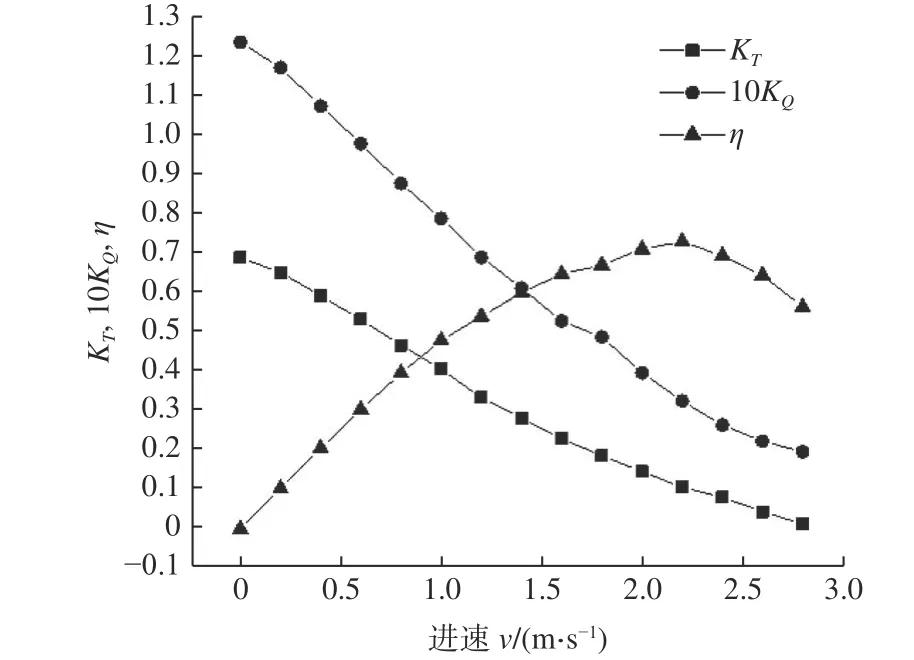
圖12 CFRP 螺旋槳的敞水特性曲線(n=427 r/min)Fig. 12 Open water character of CFRP propeller (n=427 r/min)
圖13 為CFRP 螺旋槳敞水特性與相同型值金屬螺旋槳敞水特性的比較,兩者趨勢基本一致,表明預埋FBG 傳感器的CFRP 螺旋槳達到其基本性能,也證明了FBG 傳感器的動應變測試可行可靠。
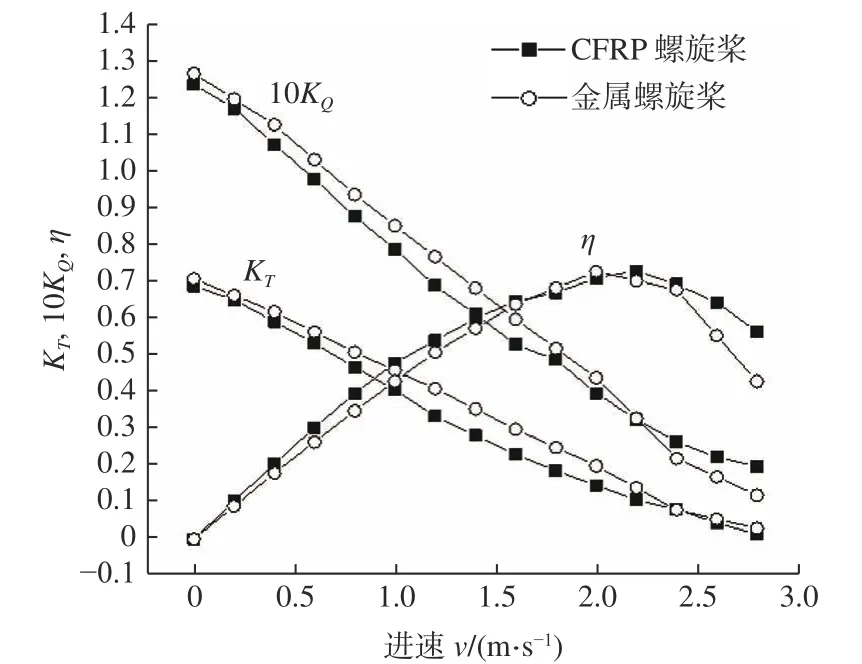
圖13 CFRP 螺旋槳與金屬螺旋槳敞水特性比較Fig. 13 Comparison of open water character between CFRP propeller and metal propeller
4 結 語
本文利用FBG 傳感的技術優勢,提出將FBG傳感器預埋于CFRP 螺旋槳,搭建了基于FBG 傳感器的CFRP 螺旋槳水下動應變在線測試系統,設置了2 類測試工況:進速為0 m/s,轉速從50~400 r/min 依次增加;轉速保持427 r/min 不變,進速從0.0~1.6 m/s 依次增加。通過FBG 傳感器采集上述2 類工況下CFRP 螺旋槳的動應變數據,并進行時域和頻域分析。結果表明:CFRP 螺旋槳上各測點的動應變特征頻率一致,主要為2 倍軸頻,可能是螺旋槳測試系統的不均勻因素造成的;各測點的動應變峰值取決于測點位置,即螺旋槳的結構力學特征。
本文實現了CFRP 螺旋槳在水下運轉狀態下的動應變在線測試,驗證了螺旋槳水下動應變測試的可行性,克服了螺旋槳水下在線測試的難題,測試結果合理可靠,可為CFRP 螺旋槳的理論設計和分析提供重要的實證依據,對研究其水動力性能具有重要意義。
