燃機快速并車過程的沖擊載荷特性分析及實驗研究
2022-04-26 07:51:30陳昊周瑞平樊紅雷俊松周少偉
中國艦船研究 2022年2期
關鍵詞:實驗
陳昊,周瑞平*,樊紅,雷俊松,周少偉
1 武漢理工大學 船海與能源動力工程學院,湖北 武漢 430063
2 中國艦船研究設計中心,湖北 武漢 430064
0 引 言
燃 燃 聯 合 動 力(combined gas turbine and gas turbine,COGAG)裝置一般在巡航工況采用單機推進,加速工況采用雙機并車推進。燃氣輪機并車的要求是保持轉速和負荷的平穩變化,因此一般在低速工況下先使工作機與并入機的轉速同步,待同步自換檔(synchro-self-shifting,SSS)離合器穩定嚙合之后,再逐漸轉移負荷,整個過程耗時較長。在某些突發情況下,例如艦船遇到敵情需緊急并車來增加功率,負荷的快速加載將產生明顯的扭矩沖擊載荷并作用于推進軸系,該沖擊載荷可能對離合器前后連接的軸系產生不利影響,因此有必要對其產生機理及影響因素進行研究。
目前,國內外學者在SSS 離合器的嚙合動力學方面做了大量研究工作,蔣德松等[1]、Jiang[2]、江嘉銘[3]、田穎等[4]通過建立力學模型,對SSS 離合器的嚙合過程進行了仿真分析;張曉云等[5]、張曉寧等[6]借助三維模型和多體動力學仿真軟件對SSS 離合器的運動過程進行了仿真計算,這些研究成果主要通過仿真分析了SSS 離合器的嚙合時間、相對轉速及阻尼孔徑等因素的影響。在實驗研究方面,魏君波[7]分析了空載狀態下的SSS離合器嚙合過程;張祥等[8-9]搭建了以電機為原動機和負載的實驗臺架,分析了SSS 離合器在嚙合脫開及負荷轉移過程中的運行性能;田穎等[10]搭建了以燃氣輪機和柴油機為原動機的柴燃聯合動力 裝 置(combined diesel or gas,CODOG)實 驗 臺架,研究了切換工況下的SSS 離合器狀態,得到了大量的實測數據。Luneburg 等[11]研究了單軸燃氣輪機并車過程中的沖擊載荷,但其動力學模型中的部分參數由隱式定義,故求解困難而難以推廣應用。陳昊等[12]借助ADAMS 軟件對SSS 離合器嚙合過程中的沖擊載荷及軸系響應進行了分析,但其未對理論方法進行實驗驗證。
綜上所述,目前國內外對于燃燃聯合動力裝置在快速并車工況下的扭矩沖擊產生機理和影響因素研究還不夠深入,并且缺少相應的實驗驗證。為此,本文擬基于SSS 離合器的嚙合動力學分析成果,研究燃氣輪機快速并車工況下SSS 離合器的動力學狀態,并建立實驗臺架進行驗證分析。
1 SSS 離 合 器 的 工 作 原 理 及 動 力 學分析
1.1 SSS 離合器的工作原理
SSS 離合器可以借助主動端、從動端的轉速差實現自動離合,其由主動件、從動件和中間件構成,對于承載能力較高的中繼式SSS 離合器,還附加有中繼件,其結構及工作原理如圖1 所示。
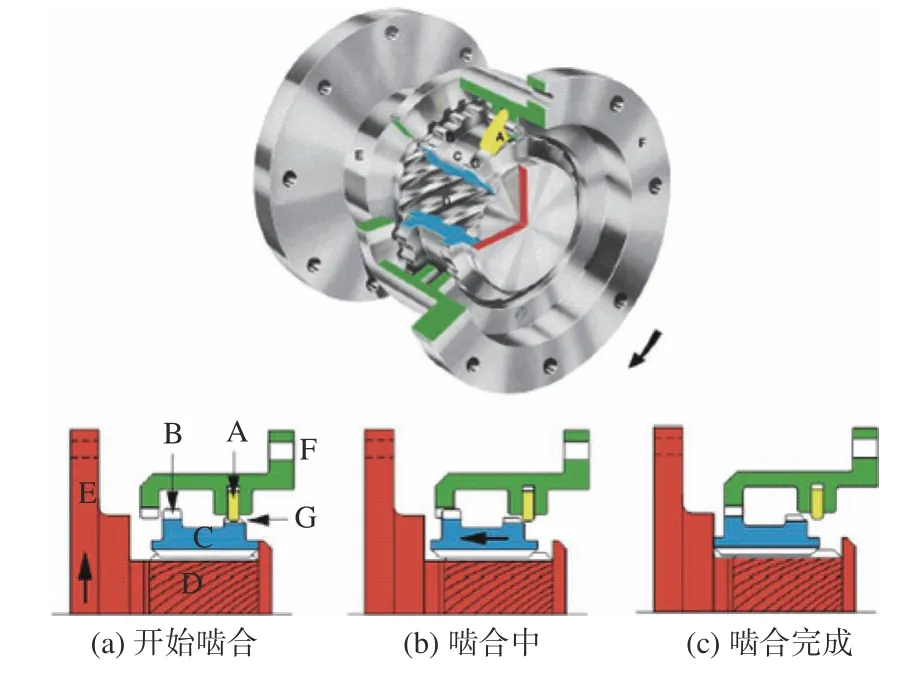
圖1 SSS 離合器的機械結構及基本原理圖Fig. 1 Mechanical structure and basic principle of SSS clutch
1.2 SSS 離合器的嚙合動力學分析
1) 主動件受力分析。
在嚙合過程的初始階段,主動件將承受外力矩Min、螺旋齒上齒面壓力切向分力所產生的周向力矩Mhr、齒面摩擦力切向分力所產生的周向力矩Mfr、齒面壓力軸向分力Fha、齒面摩擦力軸向分力Ffa和端面限制軸向運動的軸向力Fb1。當中間件接近螺旋花鍵軸的端面時,在阻尼油腔的作下,中間件將承受駐退阻力,以免產生強烈的剛體碰撞,因此主動件還會承受駐退阻力的反作用力FR。
主動件的動力學方程為
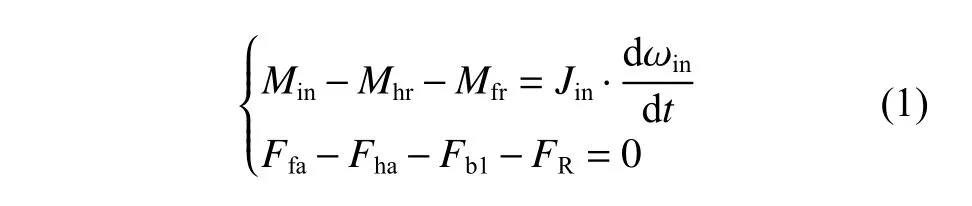
式中:Jin為主動件的轉動慣量;ωin為主動件的角速度;t為時間。
FR可以用經驗公式表示為
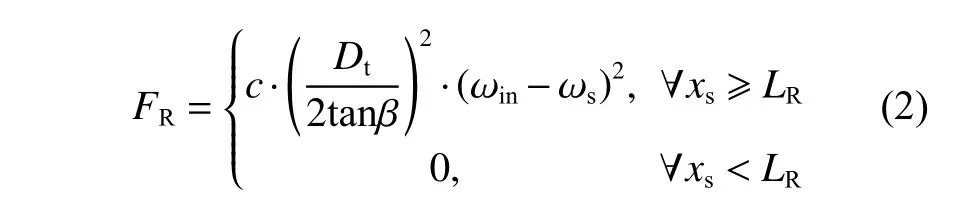
式中:c為阻尼系數;Dt為螺旋花鍵分度圓的直徑;β 為螺旋花鍵的螺旋角;ωs為中間件的角速度,故ω in 與 ω s 的差值即為中間件的軸向速度;xs為中間件的軸向滑移量;LR為阻尼油腔開始產生駐退力時的中間件滑移量。
其中,

式中:ρ 為滑油密度;Ac為阻尼油腔的橫截面積;μ為阻尼油孔的流量系數;A為阻尼油孔的橫截面積。
2) 中間件受力分析。
在嚙合的初始階段,中間件將承受棘輪棘爪齒面壓力所產生的周向力矩Mp和軸向摩擦力Ffp、來自主動件的反作用力Fha和Ffa,以及反作用力矩Mhr和Mfr。在嚙合過程中,棘輪棘爪將逐漸脫開,主齒輪與齒圈則逐漸進入嚙合。當棘輪棘爪脫開之后,中間件將受到主齒輪所產生的周向力矩Mg和軸向摩擦力Ffg,在接近嚙合完成時中間件還將受到駐退阻尼力FR。
中間件的動力學方程為
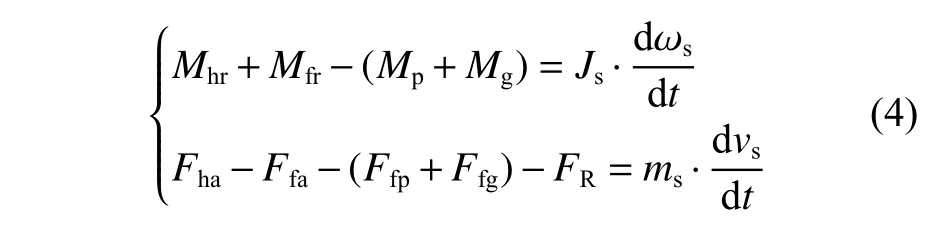
式中:Js為中間件的轉動慣量;ms為中間件的質量;vs為中間件的軸向速度。
其中

3) 從動件受力分析。
從動件在嚙合過程中將受到從動端力矩Mex、來自中間件的反作用力矩Mp,Mg和反作用力Ffp,Ffg,以及約束從動件軸向運動的作用力Fb2。
從動件的動力學方程為
式中:Jout為從動件的轉動慣量;ωout為從動件的角速度。
在嚙合過程中,由于從動件始終約束中間件的周向旋轉,則

2 雙機快速并車與解列載荷的產生機理
2.1 SSS 離合器嚙合過程的外部條件
SSS 離合器主動端的驅動力矩Min由與其連接的燃氣輪機輸出扭矩決定,而從動端的外力矩Mex則由聯合動力裝置軸系的整體運動狀態所決定。聯合動力裝置軸系可以簡化為螺旋槳、齒輪箱、SSS 離合器、燃氣輪機及相應連接軸段,如圖2 所示。
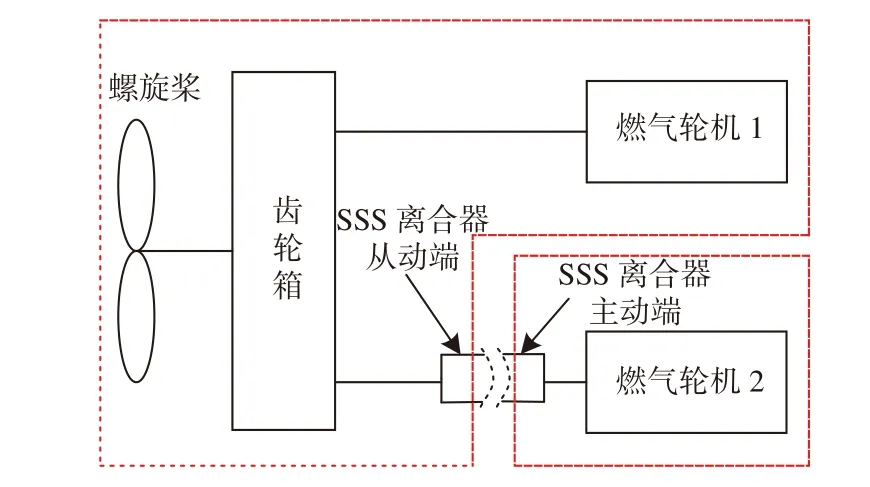
圖2 軸系拆分示意圖Fig. 2 Diagram of shafting partition
圖2 將軸系分割為SSS 離合器從動件前、后兩個部分,從動件后端軸系(與齒輪箱連接)的動力學方程為

式中:MT為另一臺已并車處于運行狀態的燃氣輪機輸出扭矩;i為齒輪箱減速比;Mpro為螺旋槳的阻力矩;為后端軸系的等效轉動慣量。

其中式中:Jfront為軸系中未經減速部分的轉動慣量(包含齒輪箱的小齒輪);Jrear為軸系中經過減速部分的轉動慣量(包含齒輪箱的大齒輪)。
Mpro的計算公式為

式中:KQ為螺旋槳的扭矩系數;ρw為海水密度;np為螺旋槳的計算轉速;D為螺旋槳直徑。
結合式(8),則式(6)中的動量矩方程可以改寫為

式中,Mr為等效限制力矩,其在棘輪棘爪脫開前即為Mp,棘輪棘爪脫開后即為Mg。
2.2 SSS 離合器嚙合過程的動力學計算方法
在SSS 離合器的嚙合過程中,各部件的速度和位置決定了SSS 離合器的嚙合狀態,其積分計算公式如下:
對于主動件,

對于中間件,

對于從動件,

式(12)~式(14)中,φin,φs,φout分別為主動件、中間件和從動件旋轉的角度。
SSS 離合器嚙合過程的動力學矩陣方程為:

在燃燃聯合動力裝置并車之前,假設一臺燃氣輪機(下文簡稱“工作機”)帶動軸系以轉速n0運轉;下達并車指令之后,并入燃氣輪機(下文簡稱“并入機”),在并入機的動力渦輪轉速達到n0之前,SSS 離合器從動端將以轉速n0跟隨運轉。此后,離合器主動件在燃氣輪機驅動下帶動中間件滑移,其中離合器按照式(15)所述的動力學關系運行,直至完成嚙合。本文將仿真分析的起點設置為并入機轉速達到n0的時刻,由于嚙合時間小于1 s,故假定燃氣輪機在離合器嚙合過程中以恒扭矩輸出功率。在一般情況下,為了追求系統的平穩運行,并入機將以很小的扭矩帶動離合器主動端持續加速直至離合器嚙合;然而,在快速并車工況下,并入機將直接以與工作機相當的輸出扭矩帶動離合器嚙合,以縮短并車耗時,從而在短時間內快速提升動力裝置的輸出功率。
本文以圖3 實驗臺架中的雙機并車軸系為研究對象,建立Matlab 仿真模型,其中工作機的扭矩設為12 N·m,并入機的扭矩設為6 N·m。在SSS 離合器嚙合過程中,中間件的運動狀態和螺旋花鍵的扭矩曲線分別如圖4 和圖5 所示。從圖4中可以看出,當中間件在t1時刻滑移至駐退阻尼力起作用的位置時,其軸向滑移速度將有所降低,而后逐漸滑移至嚙合完成位置,并在t2時刻完成嚙合。從圖5 中可以看出,在t1時刻,螺旋齒上產生了明顯的扭矩沖擊,其幅值為230.04 N·m。
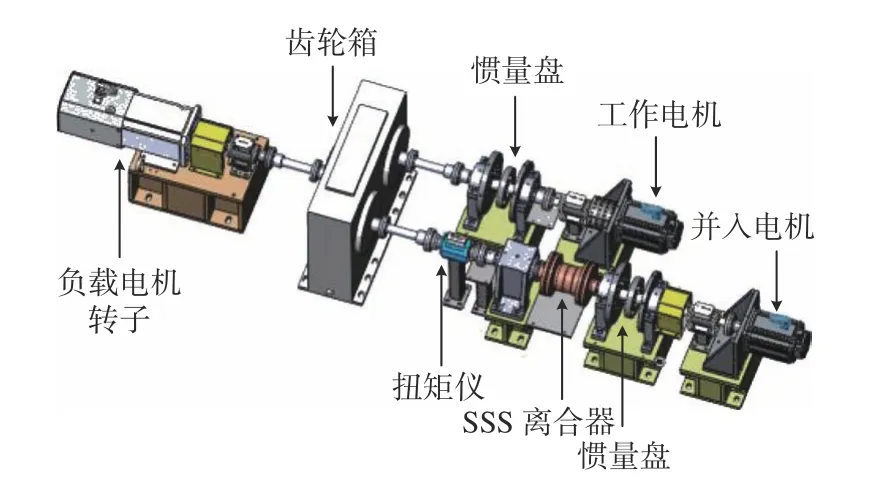
圖3 實驗臺架示意圖Fig. 3 Diagram of the test bench
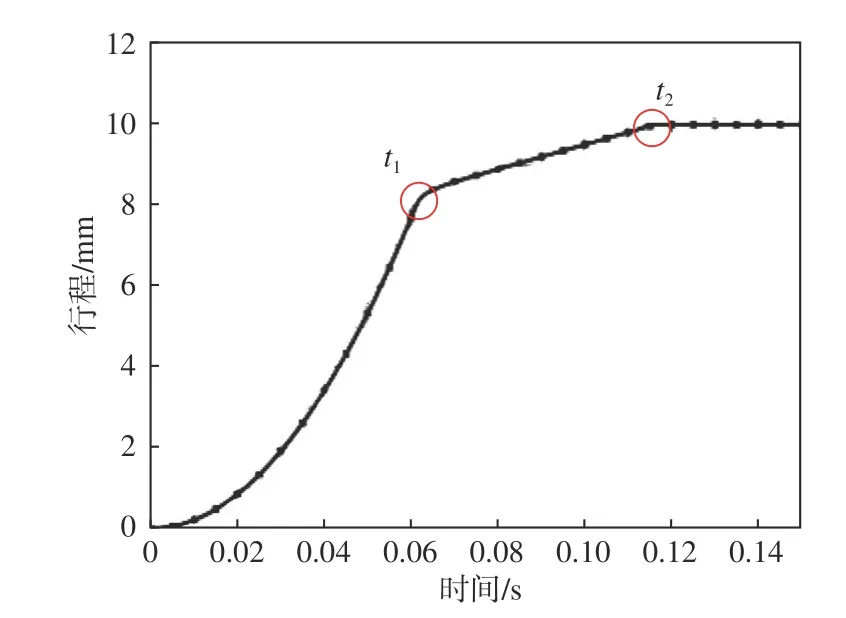
圖4 中間件行程Fig. 4 Position of sliding assembly
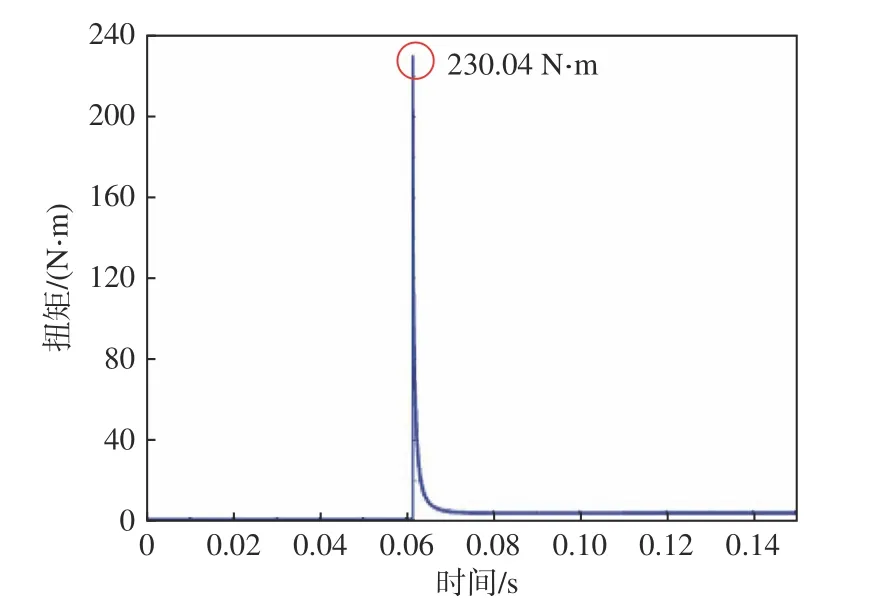
圖5 螺旋齒扭矩曲線Fig. 5 Torque on spiral spline
在產生扭矩沖擊的瞬間,雖然離合器尚未完成嚙合,但扭矩沖擊產生于螺旋齒,因此扭矩沖擊會同時作用于與離合器主從動端相連的軸系。離合器主、從動端的軸系微分方程為


式中:Jin,Cin,Kin分別為主動端軸系的慣量矩陣、阻尼矩陣、剛度矩陣;Jex,Cex,Kex分別為從動端軸系的慣量矩陣、阻尼矩陣、剛度矩陣; θ,θ˙,θ¨分別為主動端軸系的角位移、角速度、角加速度向量; θ′,θ˙′,θ¨′分別為從動端軸系的角位移、角速度、角加速度向量;Ts(t)為并入沖擊載荷所構成的向量。
軸系的動力學模型參數分別如表1 和表2 所示。
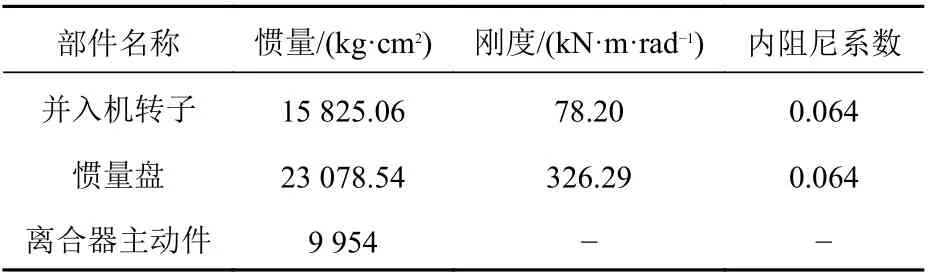
表1 主動端軸系的動力學模型參數Table 1 Parameters of active side of dynamic model
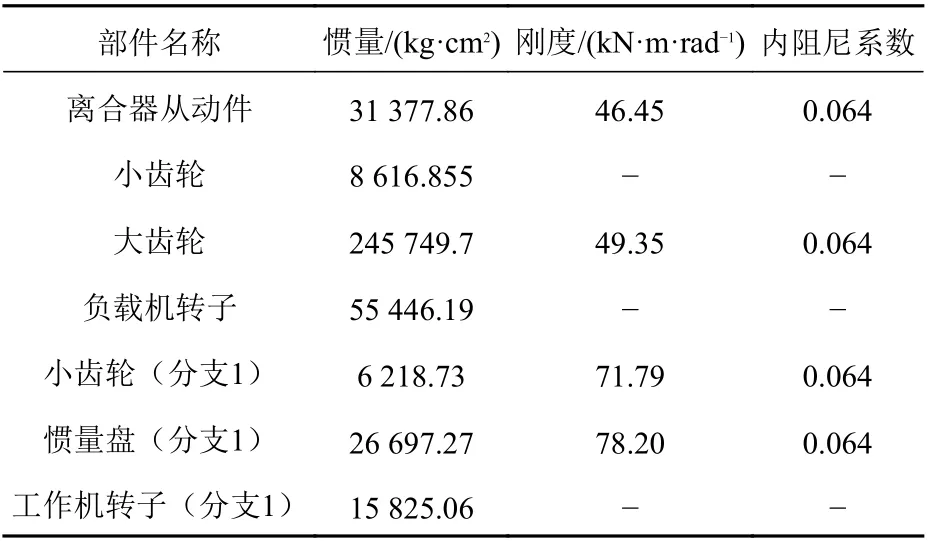
表2 從動端軸系的動力學模型參數Table 2 Parameters of driven side of dynamic model
按照鏈式系統建模原則,建立軸系的集總參數模型,然后運用Newmark 法分別對式(16)、式(17)進行時域積分,即可得到離合器主、從動端軸系在扭矩沖擊作用下的響應,如圖6 和圖7 所示,可以看出,在沖擊扭矩的作用下,主動端和從動端轉子均產生了明顯的扭矩響應,響應幅值分別為59.31 N·m 和12.54 N·m,分別達到了額定扭矩的237.34%和50.16%(本文實驗臺架的驅動電機額定扭矩為25 N·m)。
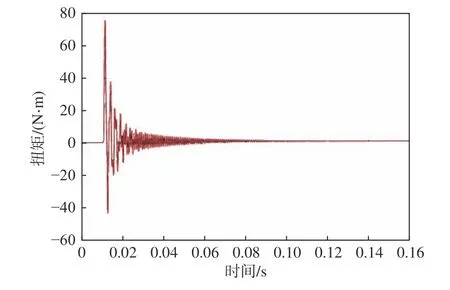
圖6 主動端軸系的扭矩響應Fig. 6 Torque response on active side of shafting
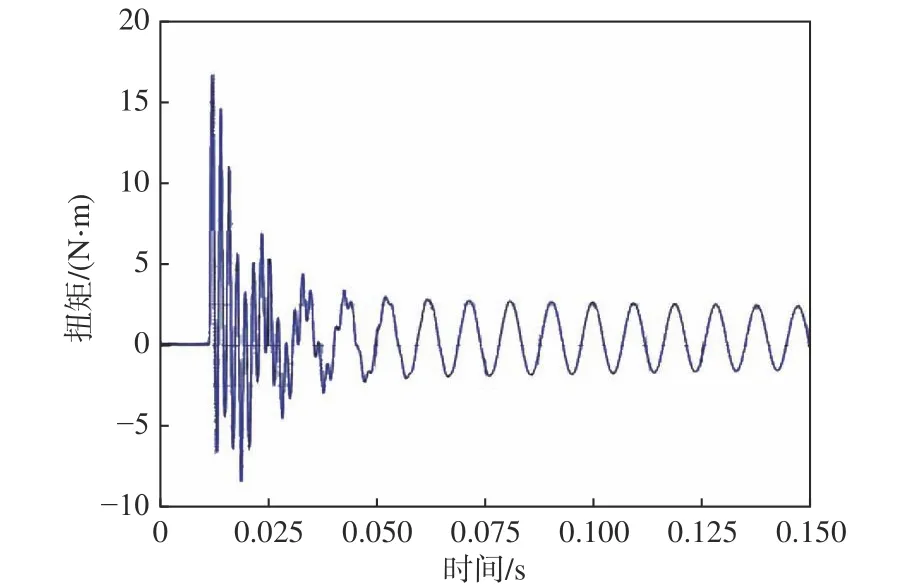
圖7 從動端軸系的扭矩響應Fig. 7 Torque response on driven side of shafting
2.3 棘輪棘爪相對位置對扭矩沖擊的影響
在上文模擬燃氣輪機并車過程中,設定SSS 離合器上的棘輪棘爪在主動端轉速超越從動端的時刻正好處于嚙合位置。在實際運行中,這一時刻的棘輪棘爪一般會錯開一定角度,即主動端需相對從動端加速轉過一定角度φr后才能使棘輪棘爪嚙合,其中φr的最大值為

式中:b為棘爪數量;zp為棘輪齒數。
設定棘輪棘爪在接觸時的相對初始角速度為ωr,則φrmax對應的ωr最大值為

一般情況下,主動端開始嚙合的相對初始角速度ωr介于0 與ωrmax之間,其值可能對嚙合過程中的扭矩沖擊產生影響,圖8 所示為ωr在最大和最小時的沖擊扭矩曲線,可以看出,ωr從0 增加至ωrmax時,扭矩沖擊的峰值由230.04 N·m 增加至794.15 N·m,增幅為245.22%。
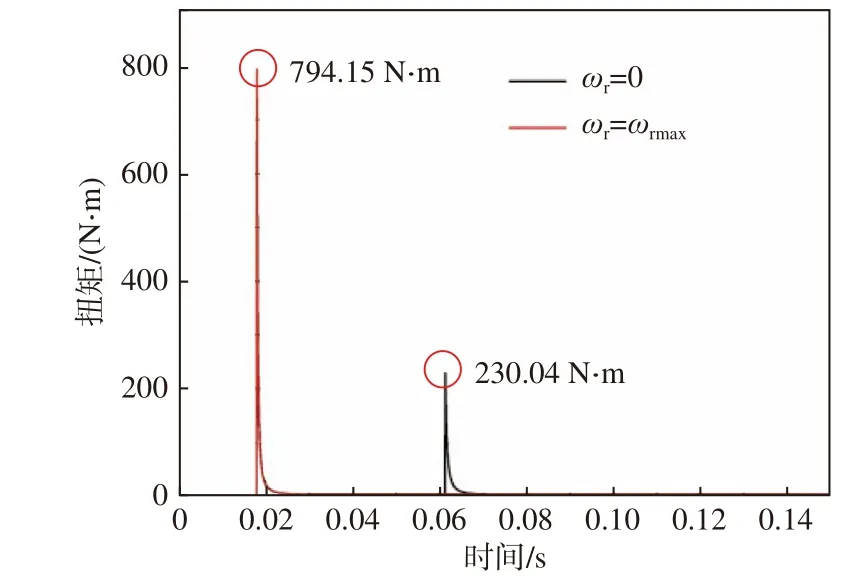
圖8 不同ωr 下的扭矩沖擊曲線Fig. 8 Torque curve under different ωr
將不同的并入燃氣輪機輸出扭矩Min及相對初始角速度ωr下的沖擊扭矩作用在軸系上,即可得到從動端轉子的扭矩響應幅值隨二者變化的曲線,如圖9 所示,可以看出,當Min和ωr增加時,轉子扭矩響應幅也隨之增加。以輸出扭矩Min=6 N·m為例,ωr最大時的扭矩響應幅值為32.91 N·m,比ωr為0 時增加了163.07%。
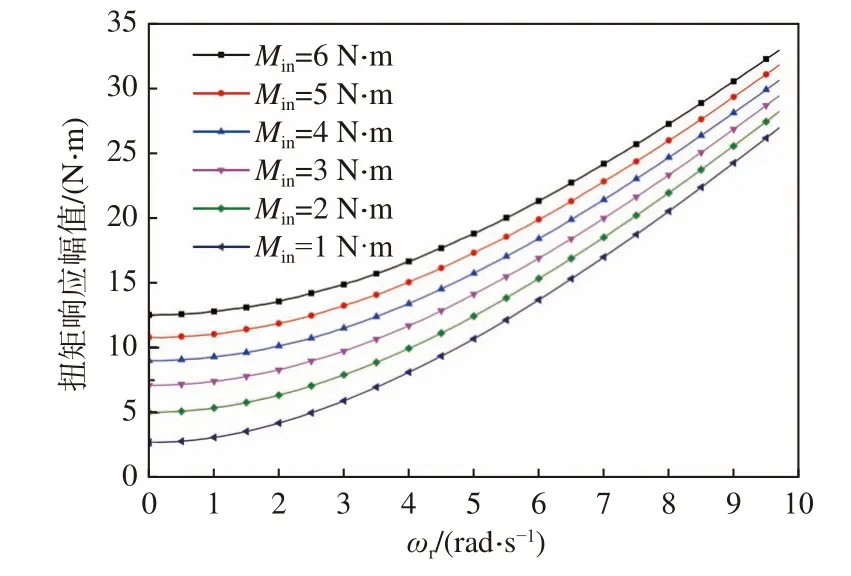
圖9 不同Min 和ωr 下的沖擊扭矩響應幅值Fig. 9 Amplitude of torque response under different Min and ωr
需注意的是,由于SSS 離合器開始嚙合前的棘輪棘爪相對位置具有隨機性,因此ωr對于系統而言也是一個隨機變量,這將導致并車過程中的沖擊扭矩和軸系響應在一定范圍內也具有隨機性。
3 并車臺架實驗
3.1 實驗臺架介紹
如圖10 和圖11 所示,燃氣輪機并車實驗臺架由2 臺驅動電機來模擬燃氣輪機(下文簡稱“工作電機”和“并入電機”)的工作特性,由1 臺負載電機來模擬螺旋槳的工作特性。3 臺電機通過1 臺速比為3:1 的并車齒輪箱進行連接,其中SSS 離合器安裝于并入電機與齒輪箱輸入軸之間,扭矩儀布置于離合器從動端和齒輪箱輸入軸之間。實驗臺架的主要設備參數如表3 所示。
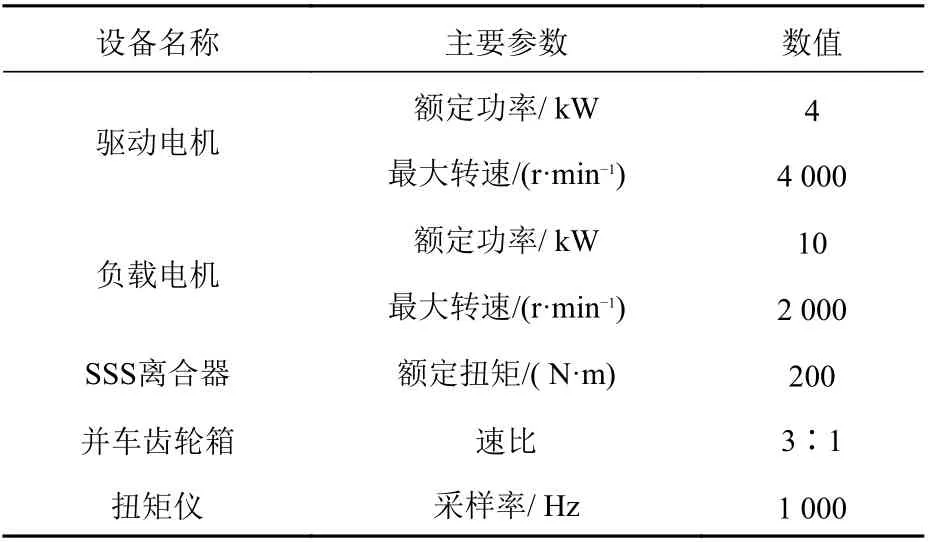
表3 雙機并車臺架的主要參數Table 3 Main parameters of double engine parallel platform

圖10 實驗臺架原理圖Fig. 10 Schematic diagram of the test bench
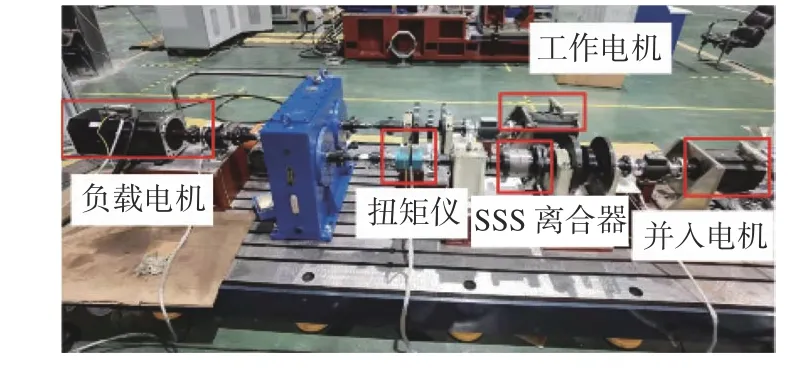
圖11 實驗臺架的設備布置Fig. 11 Equipment layout of the test bench
3.2 實驗過程及數據分析
并車實驗的控制流程如下:
1) 工作電機設置為12 N·m 輸出,同時設置相應的負載電機扭矩系。
2) 當系統穩定于一定轉速時,上位機下達并車指令,并入電機以6 N·m 的扭矩進行啟動。
3) 隨著離合器逐步嚙合,系統轉速逐步上升并趨于穩定,至此完成并車。
按照上文提出的計算方法和實驗臺架并車參數,實驗軸系在并車沖擊載荷作用下的響應幅值變化范圍為12.51~32.91 N·m(計算值)。
圖12 所示為實驗過程中扭矩儀所記錄的瞬態扭矩數據,可以看出,在完成并車的瞬間,軸系產生了明顯的瞬時扭矩響應,其幅值為19.15 N·m,沖擊持續時間約為0.15 s。通過在相同并車參數工況下重復實驗,即可發現該扭矩響應的幅值在一定范圍內波動。圖13 所示為20 次重復實驗的扭矩幅值,可以看出,軸系在扭矩沖擊下的響應變化范圍為14.07~31.74 N·m,其最大值、最小值與理論計算值的偏差分別為3.56% 和8.86%,從而驗證了本文理論計算方法的正確性。
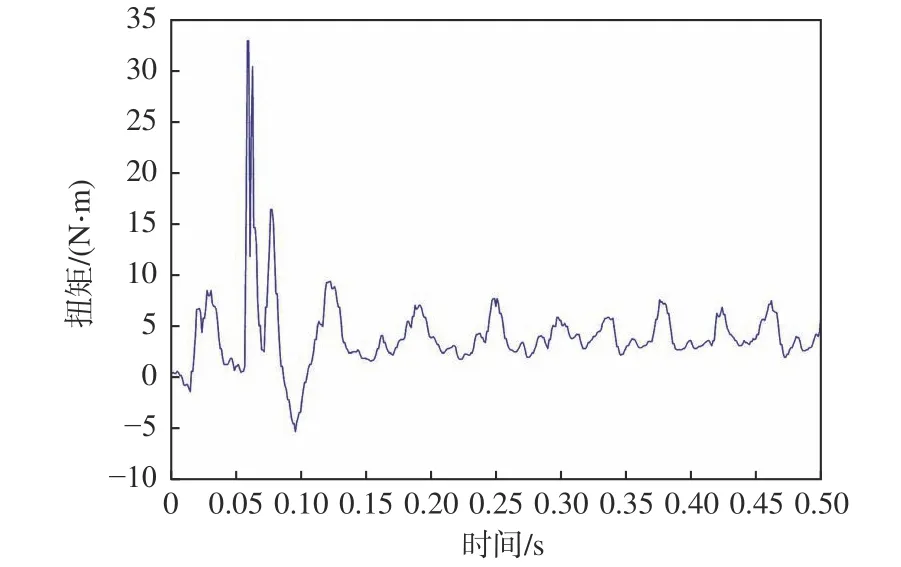
圖12 并車過程的瞬時扭矩曲線Fig. 12 Transient torque of engagement
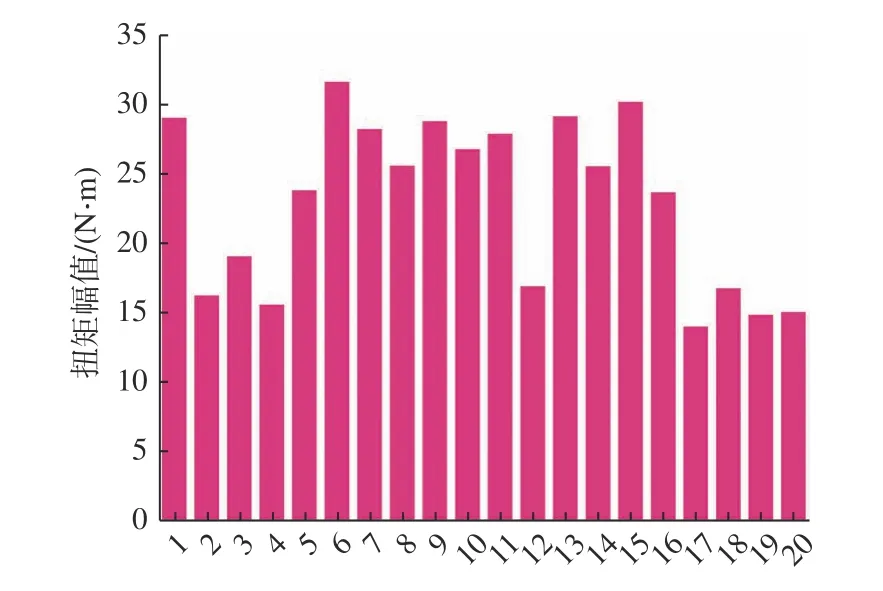
圖13 重復實驗的扭矩幅值Fig. 13 Torque amplitude in repeated experiments
4 結 論
通過建立SSS 離合器的動力學模型,對燃燃聯合動力裝置的快速并車過程進行仿真,得出如下結論:
1) 快速并車操作時,SSS 離合器阻尼油腔產生駐退力的瞬間將在螺旋齒上產生明顯的扭矩沖擊。
2) 在扭矩沖擊的作用下,離合器主、從動端連接的軸系將產生明顯的扭矩動態響應。
3) 由于棘輪棘爪相對位置的隨機性,并車過程中扭矩沖擊和軸系動態響應的幅值將在一定范圍內波動,故在安全性校核時必須予以考慮。
4) 通過臺架實驗,定量驗證了扭矩沖擊作用下軸系響應幅值及其波動范圍理論計算方法的可行性。
本文研究了燃燃聯合動力裝置快速并車解列過程中沖擊載荷的產生機理,可為燃燃聯合動力裝置的安全性評估提供參考。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
