一種基于概率統計的列車定位算法
2022-04-26 12:36:00鄧浩江
鐵路通信信號工程技術 2022年4期
鄧浩江
(陜西鐵路物流集團有限公司,西安 710000)
列車定位技術的發展經歷多個階段,從早期的軌道電路、里程計,到應答器與全球導航定位系統的應用,列車定位的準確性和實時性要求越來越高。目前列車上采用較多的定位系統是基于GNSS和車載傳感器的組合定位系統,未來列車定位技術的發展趨勢必然是盡量減少對地面軌旁設備的依賴,減少地面設備維護成本。目前全球衛星導航系統在列車定位技術中的應用越來越多,基于衛星導航的列車定位技術,依靠車載電子地圖和地圖匹配算法將衛星導航信息轉換為一維軌道里程信息,減少了列車定位系統對地面設備的依賴。同時地圖匹配算法應考慮車載安全計算機的計算負擔,充分利用電子地圖的拓撲結構,盡量提高地圖匹配算法的效率。
常見電子地圖算法主要包括點到點的地圖匹配算法、點到線的地圖匹配算法和線到線的地圖匹配算法。近年來有很多學者提出了基于以上3種算法的組合或改進算法等,如基于濾波的地圖匹配算法、基于極大似然估計的地圖匹配算法、基于權重的地圖匹配算法等。本文提出了一種基于概率統計的點到線地圖匹配算法,基于列車定位系統的誤差特性,在待匹配定位點的周圍建立置信區間,利用電子地圖的拓撲結構,快速搜索所有進入置信區間的候選軌道片段。然后通過建立匹配誤差函數,綜合計算待匹配定位點在距離和速度方向上與候選軌道片段的匹配度,選取匹配度最高的軌道片段作為匹配結果。最后計算定位點在軌道片段上的里程數,實現地圖匹配的全過程。
1 候選軌道片段的預處理
本文所采用的電子地圖數據是由車載高精度定位測量模塊以測量點為單位在列車所在軌道上測量得到的。采用分級結構建立電子地圖的索引,第一級結構為車站,第二級結構為軌道,第三級結構為軌道片段,每個軌道片段由片段頭和片段尾兩個測量點構成。測量值為測量點的經度、緯度和高程信息。假設測量點之間距離足夠小,每個軌道片段都可以認為是直線線段。
列車衛星定位的數據受到很多誤差的影響,包括衛星相關的衛星軌道誤差、衛星鐘差和相對論效應等,以及衛星信號在大氣層傳播過程中受到的電離層、對流層延時,衛星信號的遮擋、多路徑效應等,還包括接收機相關的接收機鐘差、接收機硬件延遲以及測量噪聲等。在二維平面上,定位誤差表現為無數個等概率密度的誤差橢圓。以衛星定位原始點為圓心,沿經緯度方向選取坐標軸,構建坐標系,則誤差橢圓的相關參數如下。

公式(1)中,a表示誤差橢圓的半長軸,b表示誤差橢圓的半短軸,φ表示誤差橢圓的偏轉角;σx表示定位數據經度方向的方差,σy表示定位數據緯度方向的方差,σxy表示定位數據的協方差。
地圖匹配算法的預處理過程就是利用電子地圖的拓撲結構將所有進入定位數據置信區間的候選軌道片段尋找出來。預處理流程如圖1所示。

圖1 預處理流程Fig.1 Flowchart of preprocessing
2 匹配誤差函數的建立
在獲得候選軌道片段的集合后,計算每個軌道片段的距離偏差和方向偏差,距離偏差是指衛星定位點到終止點構成的線段的距離,方向偏差是指衛星定位點與上一個定位點之間計算得到的速度方向與軌道片段線段的方向之間的偏差角。距離偏差與方向偏差乘以各自的權重后,得到地圖匹配的誤差函數,誤差函數值最低的軌道片段作為列車地圖匹配的結果。誤差函數如公式(2)所示。

公式(2)中,D表示距離偏差,φ表示方向偏差。
2.1 距離偏差計算
以待處理的軌道片段起始點為原點,經緯度方向為坐標軸建立坐標系,以向量方式表示各點和線段,如圖2所示。
圖2中A點表示坐標原點,也是軌道片段的起始點,其經緯度信息為(LonA, LatA)。B點表示軌道片段的終止點,其經緯度信息為(LonB, LatB)。C點表示待匹配的衛星定位點,其經緯度信息為(LonC, LatC), 向量LatA),向量由C點向AB線段做投影,得到交點D,利用向量的點乘和叉乘計算向量的長度:

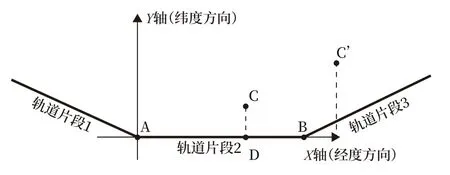
圖2 軌道片段處理Fig.2 Processing of track segments
2.2 方向偏差
衛星定位數據的航向角通過當前定位點與前一定位點計算獲得,軌道片段的方向通過電子地圖數據庫中多個測量點計算獲得。由于列車運行速度較低時,受衛星信號接收機及列車車身抖動等影響,衛星定位數據計算得到的航向角會有較大的偏差和跳變,因此設定輔助參數T:

公式(5)中,V為列車運行的速度,Vlow為列車低速閾值,其取值由衛星信號接收機的性能決定。
2.3 點到線的地圖匹配算法
選取候選軌道片段中匹配誤差函數值最小的軌道片段作為地圖匹配的結果進行點到線的地圖匹配計算,其過程就是計算衛星定位點C到軌道片段AB的投影點D在一維軌道線路上的里程數,作為地圖匹配算法的輸出結果。
軌道片段起始點A與終止點B在一維軌道線路中的里程數可以在電子地圖數據庫中得到,分別記為LA和LB。根據幾何比例關系,可以得到如下的關系式。

LD為衛星定位數據在軌道片段AB上的匹配點的里程數,至此地圖匹配過程結束。
3 地圖匹配算法流程
匹配算法流程如圖3所示,具體實現步驟如下。

圖3 地圖匹配算法流程Fig.3 Flowchart of the map-matching algorithm
1)輸入列車當前時刻的定位數據。
2)基于定位數據的統計特性,建立定位數據置信區間,利用電子地圖的拓撲結構搜索得到置信區間內的所有候選軌道片段。
3)如果置信區間內沒有軌道片段出現,放棄這組數據,返回步驟1。
4)計算衛星定位點到每個軌道片段的匹配誤差函數值,選取函數值最小的軌道片段作為地圖匹配算法的結果。
5)將GNSS定位數據轉換為匹配軌道片段上的一維里程數據。輸出里程數據。
4 仿真驗證
本文使用鐵路仿真系統對地圖匹配算法進行仿真分析與驗證,使用的電子地圖由高精度定位測量模塊在鐵路軌道上采集得到,數據精度小于0.2 m,軌道采樣點間隔不超過3 m。列車模擬在軌道上運行時的地圖匹配結果如圖4所示。

圖4 地圖匹配結果Fig.4 Map matching results
圖4中紅色標記點表示列車運行過程中獲得的衛星定位點,藍色線表示由衛星定位點經過地圖匹配算法得到列車軌道片段的連線,構成列車運行線路圖。
從仿真結果可以看出,本文所提的地圖匹配算法具有較好的準確性和實時性,可以滿足列車運行過程中實時地圖匹配的計算需求。
5 結論
本文以點到線地圖匹配算法為基礎,引入衛星定位數據置信區間的概念,利用電子地圖的拓撲結果,縮小地圖匹配算法索引范圍,提高地圖匹配算法的計算效率。通過設計地圖匹配誤差函數,確定地圖匹配的最終軌道片段,并將二維衛星定位數據轉換為一維里程數據作為地圖匹配算法的輸出結果。最后的仿真過程驗證了所提算法可以滿足列車控制系統對地圖匹配算法的實時性和準確性要求。