門式起重機變頻調速系統控制策略的研究
2022-04-27 10:38:52周威
起重運輸機械 2022年7期
關鍵詞:控制策略
周 威
中國鐵路北京局集團有限公司 北京 100070
0 引言
門式起重機(以下簡稱門機)作為一種極其普遍的起重機械設備,在現代工業體系中應用已十分廣泛。它同時適用于大宗散裝貨物和集裝化貨物的裝卸作業,是鐵路貨物運輸中最為重要、使用最頻繁的起重機械設備。近年來,交流變頻調速技術的日趨成熟使其逐漸成為鐵路門機最主要的調速方式。而在交流變頻調速系統中,采用何種控制策略是決定調速性能的關鍵性因素,因此,針對鐵路門機的實際工況和負載類型,選擇合適的控制策略是決定鐵路門機作業性能的關鍵環節。
1 交流變頻調速的控制策略
在交流變頻調速中常用的控制策略有恒壓頻比控制、矢量控制、直接轉矩控制、轉差頻率控制[1]。
1.1 恒壓頻比控制
根據異步電動機的理論知識可知,其轉速為

式中:n為電動機轉速,f為定子電源頻率,p為電動機的極對數,s為電動機轉差率。
異步電動機每相定子的感應電勢為[2]
式中:f1為每相定子的頻率,N1為每相定子的繞組匝數,kN1為每相定子的繞組系數,Φm為每極氣隙的磁通量。
通過變頻調速時,如果只降低頻率f1,保持Eg不變,則通過上述可知,電動機的每極磁通Φm會變大,勵磁電流Im也會隨之變大。所以,在調節頻率f1時,必須同時調節Eg,才可使磁通Φm保持恒定。
由式(2)可知,要使磁通不變,降低頻率的同時也要降低Eg,且滿足

然而,想要控制定子中的感應電勢很難實現。當感應電勢的值較大時,定子漏磁阻抗壓降值非常小,以至于可忽略不計,而認為U1≈Eg,U1為定子相電壓,則得

以上是恒壓頻比控制的原理。其特點是:電路簡單、制造成本低,1臺變頻器可負載多臺電動機,目前已大量應用于各個工業部門。由于其控制結構一般為開環,且調速能力受負載的影響較大,轉矩的調節效率低,故只適用于負載變化率低和對控制性能要求不高的場合。
1.2 矢量控制
矢量控制的基本思想是將異步電動機的數學模型通過坐標變換,等效為直流電動機模型,接著按照直流電動機的控制方式,對異步電動機的轉矩和轉速進行調節[3]。以轉子磁場定向的矢量控制為例,具體的實現過程為:先把異步電動機在A-B-C三相靜止坐標系中的定子交流電流iA、iB、iC經Clarke變換得到α-β兩相靜止坐標系中的交流電流 iα、iβ,再把 iα、iβ經 Parke變換得到d-q旋轉坐標系中的直流電流id、iq(id相當于勵磁電流,iq相當于轉矩電流),從而通過控制三相電流來實現對勵磁電流和轉矩電流的控制,進而實現對電動機轉速和輸出轉矩的控制。
上述過程中的Clarke變換形式為
異步電動機在三相A-B-C靜止坐標系上的數學模型經過Clarke變換和Park變換后,在d-q旋轉坐標系中的電壓方程為
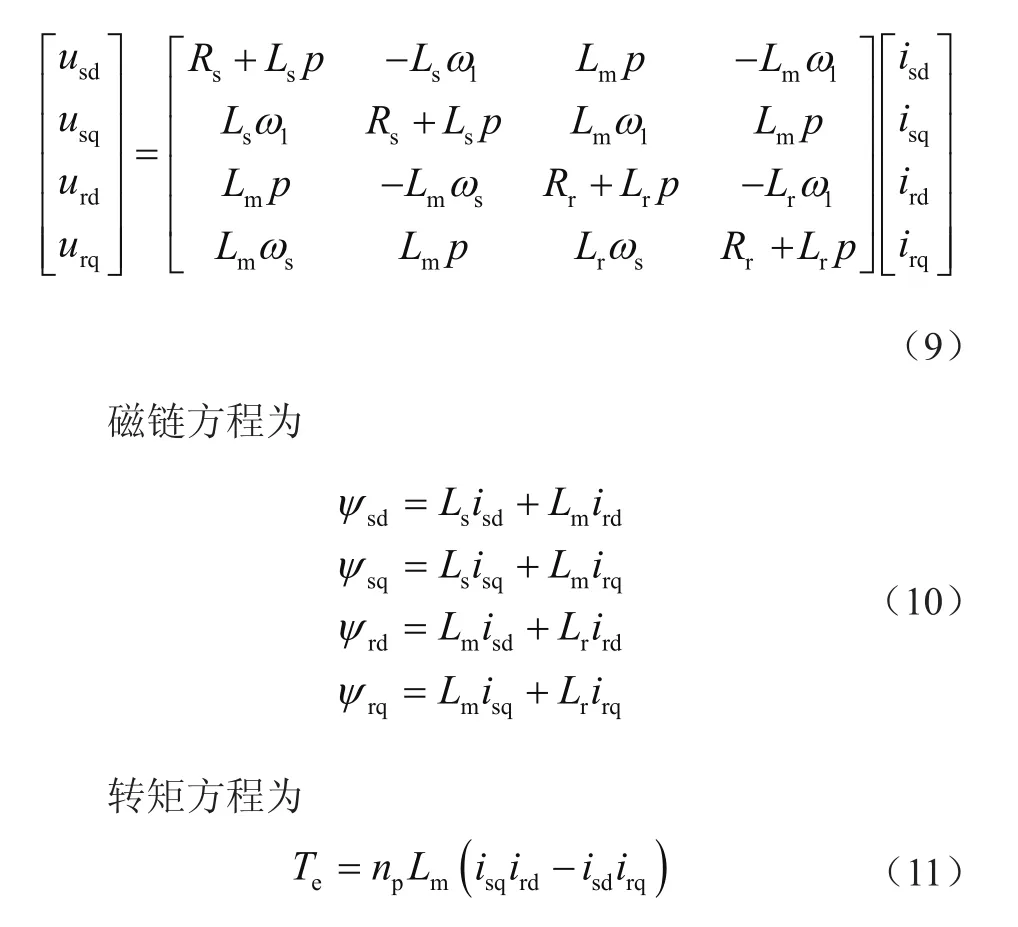
式中:usd、usq、urd、urq分別為等效后定、轉子相瞬時電壓;isd、isq、ird、irq分別為等效后定、轉子相瞬時電流;Rs、Rr分別是等效后定、轉子每相繞組的電阻值,Ψsd、Ψsq、Ψrd、Ψrq為繞組的全磁鏈;Lm、Ls、Lr分別為等效后定轉子繞組的互感、定子繞組的自感、轉子繞組的自感,為負載轉矩。
對三相異步電動機進行速度調節的同時還要調節轉矩的輸出,而想要控制轉矩的輸出就要控制磁通,因為電動機轉矩的輸出與定子和轉子的旋轉磁場和其夾角密不可分。在研究同步旋轉坐標系時假設一種特殊情況,即d軸的方向與轉子磁鏈Ψr的方向相同,q軸方向與轉子磁鏈Ψr的方向垂直,所以Ψr的大小只與在d軸上的電流分量,即勵磁電流isd有關[4]。而電動機轉矩只與在q軸上的電流分量,即轉矩電流isq有關。
根據上述假設的情況,式(10)可變為
將式(12)代入式(9),并考慮對于鼠籠型異步電動機,轉子可看成回路短接狀態,則數學模型中的電壓urd=urq=0,矩陣方程可簡化為

式(13)~式(16)是基于轉子磁場定向矢量控制策略的數學方程。將異步電動機動態數學模型的等效變換關系以結構圖的形式表示出來,如圖1所示。該控制策略對定子勵磁電流分量和轉矩電流分量解耦控制,對轉速轉矩控制性能非常好,調速范圍寬,可與直流調速相媲美,適用于對調速和控制性能要求均較高的場合[5]。
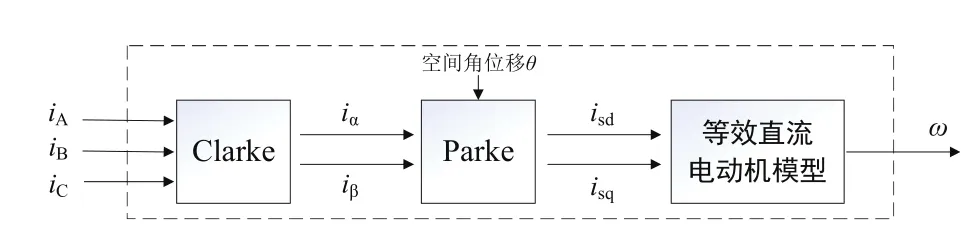
圖1 異步電動機動態數學模型的等效變換
1.3 直接轉矩控制
直接轉矩控制又叫DTC控制,其基本思想與矢量控制相似,也是將異步電動機的數學模型進行坐標變換,區別在于直接轉矩控制只需要進行一次坐標變換,即直接把異步電動機在A-B-C三相靜止坐標系中的定子交流電流iA、iB、iC經Clarke變換得到α-β兩相靜止坐標系中的交流電流iα、iβ,直接在靜止坐標系中對異步電動機的數學模型進行分析[6]。由于其數學推演過程與矢量控制相同,在此不再進行贅述。最終經過推演可得基于定子磁場定向直接轉矩控制策略的數學方程為
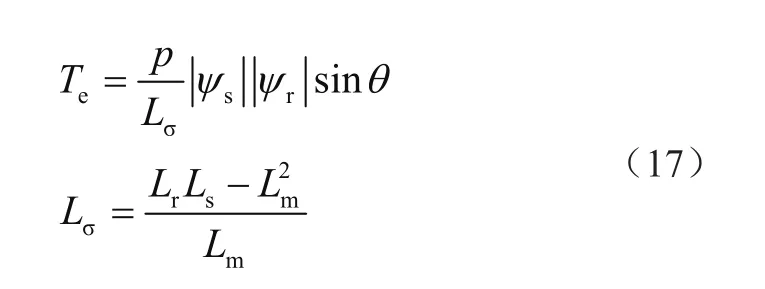
式中:θ為定子磁鏈和轉子磁鏈的夾角。
與矢量控制策略相比,直接轉矩控制對電動機轉子的控制量采用的是狀態干擾而不是參數干擾,所以一般來說,相比于矢量控制,直接轉矩控制有更強的魯棒性。但直接轉矩控制也有很明顯的缺點:在直接轉矩控制中,定子磁鏈幅值和相位的確定大都需要通過定子電阻。電動機高速旋轉時,定子電阻壓降與定子電壓相比可忽略,故可較準確地得到定子磁鏈的位置和幅值。當電動機轉速較低時,定子電阻壓降就不得不考慮,從而導致對定子磁鏈位置和幅值的估算有比較大的誤差[7]。
1.4 轉差率控制
轉差頻率控制是基于恒壓頻比控制,針對電動機實際轉速所對應的頻率和預期輸出轉矩來控制逆變器輸出的電源頻率,以此供給電動機從而輸出對應的轉矩。異步電動機的機械特性方程式為

令式(18)sω1=ωs中,其中ωs為轉差角頻率

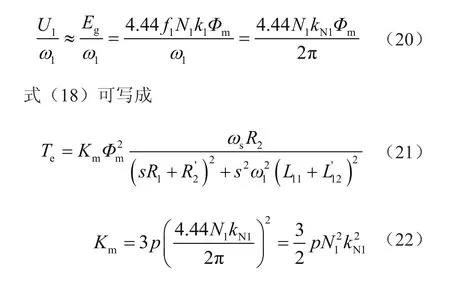
由于異步電動機機械特性上有最大值,當轉差率小于臨界轉差率(對應于電磁轉矩最大的轉差率)時,電動機運行在穩定工作區,電動機的電流比較小;當轉差率大于臨界轉差率時,電動機進入不穩定工作區,電動機的電流增大,轉矩減小。所以在調速過程中,要始終使電動機的轉差率小于臨界轉差率。即異步電動機穩定運行時的轉差率很小。從而sω1=ωs也很小,可認為式(21) 中的,則式(21)可近似寫為
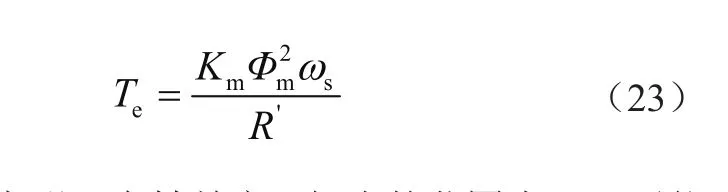
式(23)表明,在轉差率s很小的范圍內,只要能夠維持氣隙磁通Φm不變,異步電動機的轉矩就近似與轉差角頻率成正比。即在異步電動機中控制ωs,就和直流電動機中控制電流一樣,能達到控制轉矩的目的[8]。控制轉差角頻率就代表了控制轉矩,即為轉差角頻率控制的原理。
轉差率控制是閉環控制,須采用速度和電流的雙反饋閉環控制,進而使整個控制系統運行的可靠性大大提高。該控制策略與恒壓頻比控制相比,對速度和轉矩急劇的反應均非常迅速,大幅度提高了速度調節的精度,但該控制策略的通用性不佳。由于速度閉環控制環節在計算轉差率時,不得不根據電動機的差異性來調整計算參數,故該控制策略只適用于拖動直線型負載。
將上述的4種控制策略的綜合性能進行比較,對比結果如表1所示。
2 鐵路門機變頻調速控制策略的選用
變頻調速系統采用什么樣的控制策略應由不同機構負載類型、工況環境等多方面因素決定。下面分別針對鐵路門機起升機構和運行機構進行研究分析。
2.1 起升機構
起升機構的負載屬于勢能負載,既對電動機轉速的控制精度要求較高,又對電動機輸出的轉矩和動態性能要求嚴格[9]。根據表1中關于變頻調速控制方式的比較,矢量控制和直接轉矩控制的綜合調速性能最優,但起升機構在作業過程中低速運行的工況極為頻繁,而直接轉矩控制在低速狀態下又存在明顯的缺點,故起升機構的變頻調速選擇閉環矢量控制策略。控制系統主要包括轉子磁鏈觀測器、PI調節器、坐標變換、PWM調制、閉環采樣和主功率電路等環節組成。系統結構如圖2所示。
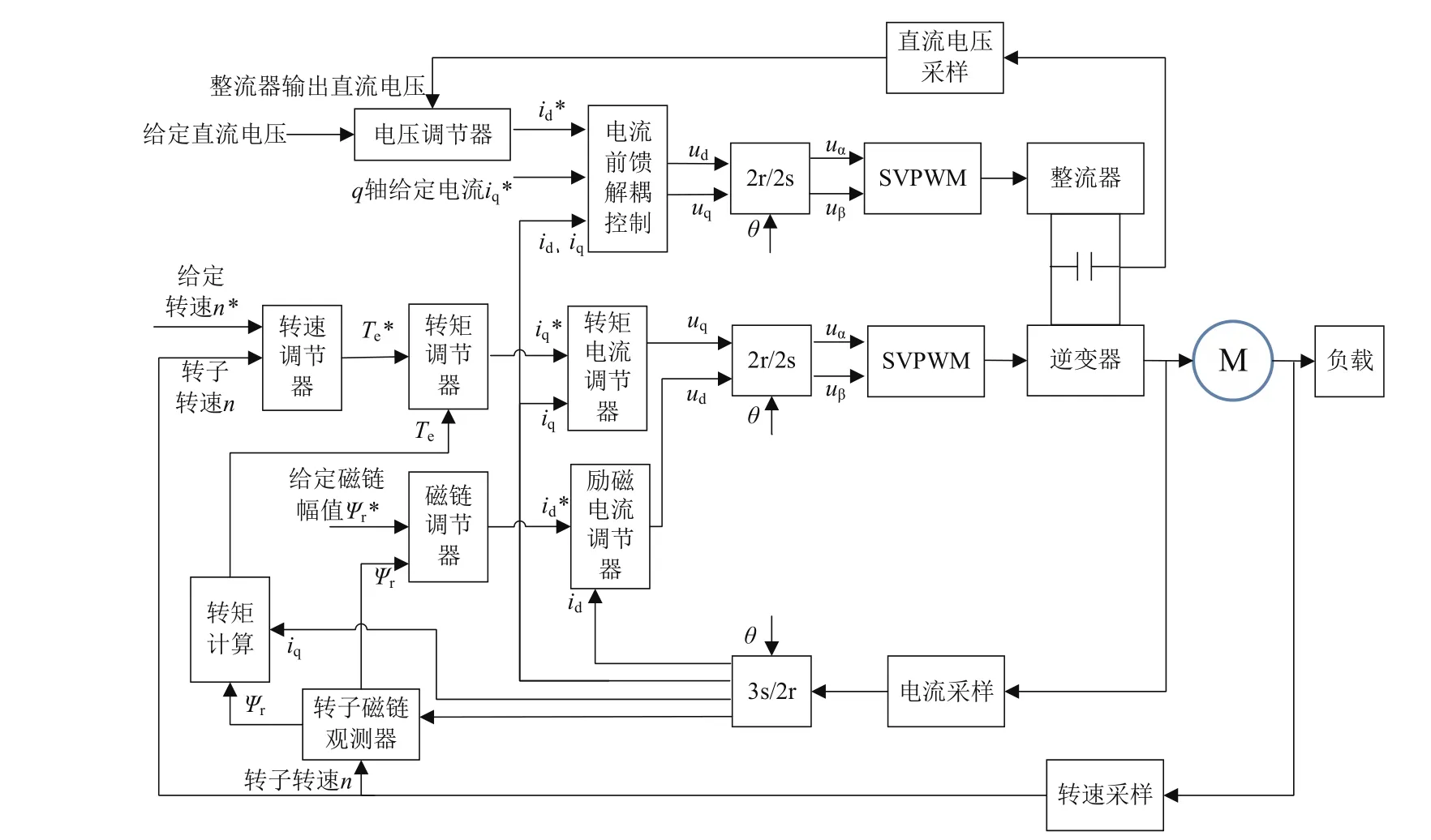
圖2 起升機構矢量控制變頻調速系統框圖
2.2 運行機構
考慮到運行機構的工作頻率較少,且功能只是實現門機作橫向和縱向平移,進而實現貨物平移的目的,對轉速的控制精度、轉矩控制和動態性能要求并不是很嚴格[10]。考慮到恒壓頻比控制相比另外3種控制策略電路簡單、制造成本低,且能滿足運行機構1臺變頻器控制多臺電動機的調速要求。所以運行機構的變頻調速選擇開環恒壓頻比控制策略,選擇SPWM方式進行調制。控制系統主要由整流電路、逆變電路、控制和驅動電路 組成。系統結構如圖3所示。
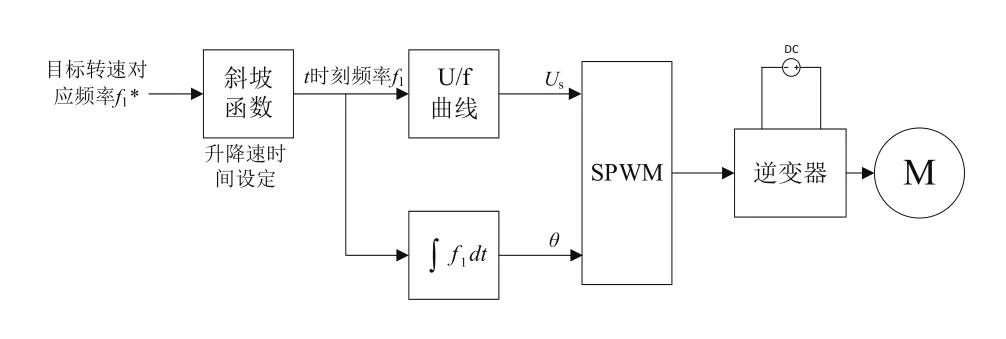
圖3 運行機構恒壓頻比控制變頻調速系統框圖
3 結語
本文通過對變頻調速系統中4種主要控制策略在原理、算法和調速性能等方面的研究對比,根據鐵路門機起升機構、運行機構的負載類型和實際工況,分別選擇最優控制策略。在保證門機使用可靠性的基礎上,提高設備的作業效率,順應我國鐵路運輸行業低能耗、高效率的發展趨勢,具有很高的經濟效益和節能效益。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
