某型自動舵分羅經航向誤差大故障分析與處理
2022-04-28 02:26:18譚志楊鄒丑田鐘多就
中國修船 2022年2期
譚志楊,鄒丑田,鐘多就
(1.91902部隊,廣東 廣州 510320;2.92326部隊,廣東 湛江 524002)
近幾年,隨著信息技術的應用日益廣泛和深入,帶有微機控制的羅經同步涌現。但對于許多在航船舶來說,整機更換傳統的羅經顯然代價極大,因此在原有系統上,進行部分環節的數字化改造,以適應船舶設備各位置對航向信息的數字化需求,這是十分可行和必要的。如何進一步提升羅經航向信息的提取和利用,更好服務于船舶航行,已成為當前許多船舶要著手考慮的問題之一。在深入進行數字化改造應用的同時,許多設備出現了不少數字化改造后的故障,與傳統模擬電路故障有著本質上的差別。本文以某型自動舵出現分羅經航向誤差大的典型問題進行了分析和處理,對類似數字化改造后設備故障的發生規律有了進一步的認識,從而也為今后類似故障問題的分析積累了參考經驗。
1 故障現象
該羅經系統是利用電磁控制方式使陀螺儀實現自動找北并穩定指北的一種航海儀器,它具有“羅經”和“方位儀”2種工作狀態,其具有啟動時間短、慣性誤差小、可在高緯度使用、體積小、重量輕等優點,因此迅速成為船舶指向的主要羅經系列之一[1]。該羅經系統由主羅經及其附屬儀器組成,主羅經為主要部分,具有航向指示的性能,附屬儀器是確保羅經正常工作的必須設備。為了能在船舶需要的地方復示航向,在整套羅經中,設置了多個分羅經。
該羅經系統在碼頭且不啟動陀螺儀的情況下,模擬航行時航向的變化,用手慢慢撥動方位環,每隔10°分別記錄下主羅經和自動舵分羅經的航向,出現自動舵分羅經接收航向信號不固定誤差的故障現象,精粗刻度盤反復左右跳變劇烈。進一步整理航向檢查記錄(0°~ 210°)8個點的航向記錄,發現誤差范圍為+3°~ -1°,已出現極大超差現象,系統已無法正常使用。把主羅經的航向值,進一步與自動舵羅經、分羅經、雷達設備、顯控臺設備航向顯示對比,通過統計可知,只有自動舵分羅經誤差為最大+3°,已影響了系統正常工作。其他用戶中的分羅經最大誤差為+0.1°,雷達設備、顯控臺設備航向顯示均無誤差存在。
2 故障原因分析
該改進型羅經航向發送和接收系統有如下特點。一是用戶多,模擬分羅經達到21個,數字用戶達到10個,且數字用戶和模擬用戶交混。二是航向信號產生、發送和接收與常用同步系統在配套方式上存在差異。原本在未進行數字化改造情況下,排除類似自動舵分羅經航向誤差大的故障是常見故障。但數字化改進后,出現類似故障,除了通常原因外,不得不考慮內部數字處理的原因。對此,需要單獨分析一下數字和模擬航向信號發送與接收傳輸通道異同,為故障排除奠定一定原理基礎,模擬通道航向發送與接收流程圖如圖1所示。
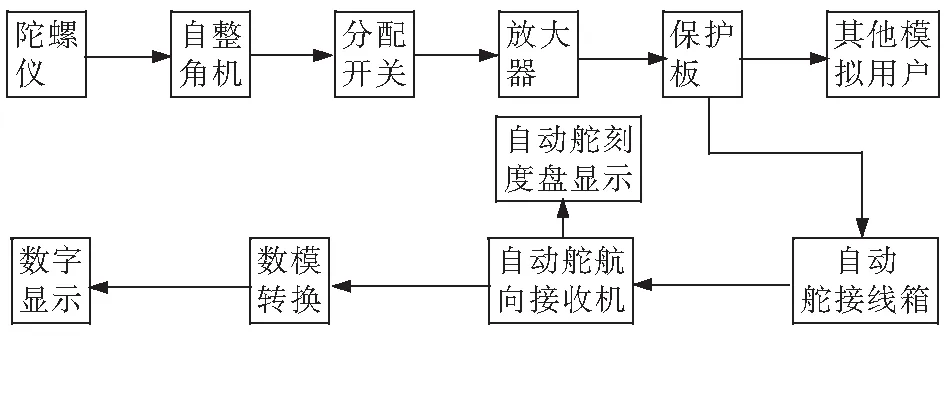
圖1 模擬通道航向發送與接收流程圖
從圖1可知,陀螺儀通過齒輪機械組帶動自整角機一起轉動,航向發送機則產生三相同步信號,通過分配開關,經放大、保護環節后,輸送到模擬用戶。同時,從航向發送箱里發送航向信號至自動舵接線箱,再到主操臺上的航向接收機,一路經過自動舵刻度盤顯示,另外一路經過數模轉換用作數字顯示。
數字通道航向發送與接收流程圖如圖2所示,陀螺儀通過齒輪機械組帶動旋轉變壓器一起轉動,產生航向正余弦信號,經數模轉換,送到微機主板上進行處理。寫入程序的芯片通過總線與微機保持通信。通過補償非線性誤差、溫度漂移誤差等方式,不斷比對和修正每0.1°航向的變化,以減少對系統誤差造成的影響。最終形成的航向數字信號,從微機接口板經串行接口板電路輸出到各個數字用戶。
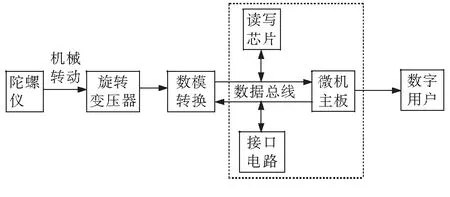
圖2 數字通道航向發送與接收流程圖
從以上2種不同通道的航向發送與接收的原理流程圖分析可知,羅經的航向信號發送到模擬用戶,包括自動舵,屬于統一的信號,自動舵分羅經需要數字顯示時,末端使用數模轉換即得到數字航向信號。數字航向信號也是在羅經內部就實現了數字信號的統一傳輸。然而,本船的改進型自動舵分羅經航向接收信號屬于2個通道交織在一起的情況,先是接收模擬航向,后又在內部進行了數模的轉換,最后顯示的是數字信號航向。
依據上述原理分析,造成自動舵模擬航向不匹配的原因可能會有:自動舵分羅經這路的信號傳輸通道有接觸不良或開路點;位于自動舵主操臺上的航向匹配開關,被經常使用導致了損壞或觸頭接觸不良;自動舵分羅經上的航向接收機齒輪組因使用強度大導致的磨損造成了間隙大或下端的阻尼輪存在失效的可能。同時,造成數字航向誤差大的可能原因有:不排除上述的機械部分存在故障,再者就是微機主板上內部程序數據出錯,或者是數據通信接口板存在故障[2]。
3 處理措施
基于以上原理分析,針對此故障展開排除處理。歸納總結分為以下幾個步驟。
1)對航向復示精度進行匹配復驗。一般匹配復驗,不需要每個分羅經用戶都檢查復驗,否則工作量就比較大。只需要匹配復驗導航雷達、綜合導航顯控臺與主羅經上所顯示的航向數值以及左右船舷上的分羅經模擬顯示。此時,導航雷達、綜導顯控臺與主羅經顯示屏上數值顯示是一致的。檢查自動舵航向顯示裝置發現,自動舵分羅經、主羅經、刻度盤3者顯示均不一致。那么基本能判定,在自動舵分羅經傳輸這條分路上存在故障。
2)檢查排除機械原因引起的誤差。尤其是對此類較為老舊的設備,因使用強度導致的誤差和故障發生概率會大大增加。針對可能性比較大的羅經機械傳動齒輪組、旋轉變壓器和接插件、接線等部位進行檢查,均未發現異常,即使有磨損間隙,帶來的誤差也不至于導致系統無法使用,由此可排除機械方面信號線路不牢固或線路開路方面問題。
3)查驗分羅經與自動舵連接上是否存在故障。在日常維修過程中,經常會采取另外接一個工作正常的標準分羅經的方式,以此能夠快速查找和排除共同部分存在故障的可能。將自動舵主操臺上接收機的激磁線和信號線拆下來,一對一連接上標準分羅經。通上電源后,發現標準分羅經同樣發生了跳變故障,只是程度有所減弱。由此可排除羅經航向發送箱至自動舵接線箱存在故障的可能,也可斷定自動舵的內部線路存在故障點的可能性極小。再次恢復線路,重新通電,故障復現。
4)進一步檢查航向接收機周邊線路。可推斷,故障點可能會集中在航向接收機周邊線路上。拆開接收機上2個固定壓板后,拔出接收機,發現接收機的阻尼輪已松動脫落。這個阻尼輪起到的作用類似微分原理,能夠進一步穩定接收機轉速,當航向失配到即將同步時,阻尼輪可讓接收機平穩停下來,以達到穩定接收機轉速的作用。安裝并緊固阻尼輪后,經通電檢查,航向不穩定跳動仍然沒有得到徹底有效解決。
5)檢查數字航向信號發送通道關鍵點。從測量的接收電機信號可知,0~50 V時電壓有跳躍現象,用示波器觀察三相信號,發現正弦波上疊加了很大的尖脈沖,而且還伴隨著不規則的反向波形。由此,進一步檢查數字航向信號發送通道,追蹤到微機板的輸入端。首先,更換了處理芯片,但故障現象并沒能得到排除。接著,根據數字通道航向發送與接收原理分析,懷疑主板上的可讀寫存儲器的航向修正功能可能會導致故障出現。用擦除器將原程序擦除,重新寫入備份。最后,開機檢查,發現故障得以徹底排除。
綜合分析,接收機上的阻尼輪脫落,并不是此故障的主要原因,且具有迷惑性。從上述故障排除過程可知,內部軟件數據出錯是此故障的主要成因,也應是此類數字化改進后自動舵分羅經航向發生故障主要考慮點之一。
4 結束語
綜合本故障實例分析與處理,本故障既有硬件方面阻尼輪脫落的部分原因,也有軟件程序上的數據出錯原因。當前,我們常規的維修保養集中于硬件保養,即對某個器件或某個模塊進行保養。在軟件程序上出現錯誤,可能被認為讀寫存儲器中的航向誤差修正參數不具有自我修改的可能性。但隨著電子技術的發展和廣泛應用,設備上應用軟件的隱形故障或數據冗余處理,將會是設備以后維護保養的重點。本案例當中,微機主板的存儲器中航向誤差修正參數出錯,就明顯屬于內部軟件數據出錯。但對于一種應急處理,如果將系統當中的微機主板更換了,確實可以排除故障,但是維修成本將會大大提高。只有找準了主要原因,將程序重新寫入,糾正內部軟件數據錯誤,故障方可得到排除,這也將極大縮小維修成本。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中國生殖健康(2019年3期)2019-02-01 06:12:26
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34