核應急處置機器人重要電氣部件γ和中子輻照前后性能對比
2022-04-28 03:43:24朱性利李宜全汪曼管朝鵬張志義
機械工程師 2022年4期
朱性利,李宜全,汪曼,管朝鵬,張志義
(核動力運行研究所,武漢 430223)
0 引言
核動力裝置、核電站和輻照中心運行和維護期間,當主控顯示異常情況時,需盡快確認閥門、儀表等狀態;在發生承壓設備泄漏、主設備損壞、海嘯和地震等大型地質災害時,需盡快獲取現場真實泄漏、損壞情況,并根據現場情況采取相應的應急處置、救援作業等。通常在核設施發生事故時,越早獲取現場第一手材料,事故處置、救援作業的應對措施也越有效,也能盡最大限度減輕核事故所造成的危害,因此亟需研制核應急處置機器人[1]。
核反應堆運行期間和事故后,通常存在高放射性的γ和中子輻射,核應急處置機器人的抗γ和中子輻照性能對其研制至關重要[2]。為更好地評估核應急處置機器人重要電氣部件在γ和中子輻照后的狀態變化,在核應急處置機器人開發過程中,針對其使用的重要電氣部件,如直流有刷電動機、伺服電動機、鋰電池、位置編碼器、驅動器等在γ和中子輻照前后進行了多項性能指標的測試和對比。
1 核應急處置機器人組成與結構
核應急處置機器人主要包括機器人本體、自動收放線系統、遠程控制箱等。機器人本體通過雙擺臂+主履帶移動車體的方式實現機器人在核設施復雜環境內的靈活移動,車體上部搭載五軸機械臂,通過機械臂的運動軌跡控制,以及安裝在機械臂前端的作業工具的張合、旋轉可實現核應急場景下的異物抓取、開關防火門和閥門;控制箱通過光纖連接機器人本體與遠程操作箱,實現兩者在核設施屏蔽環境下的有線通信;遠程操作箱用于機器人本體的遠程移動、機械臂作業的遠程遙控,并通過車體上攜帶的云臺攝像頭、作業工具監視攝像頭實現對機器人周邊環境及作業工具的遠程視頻監控。
核應急處置機器人總體結構如圖1所示。
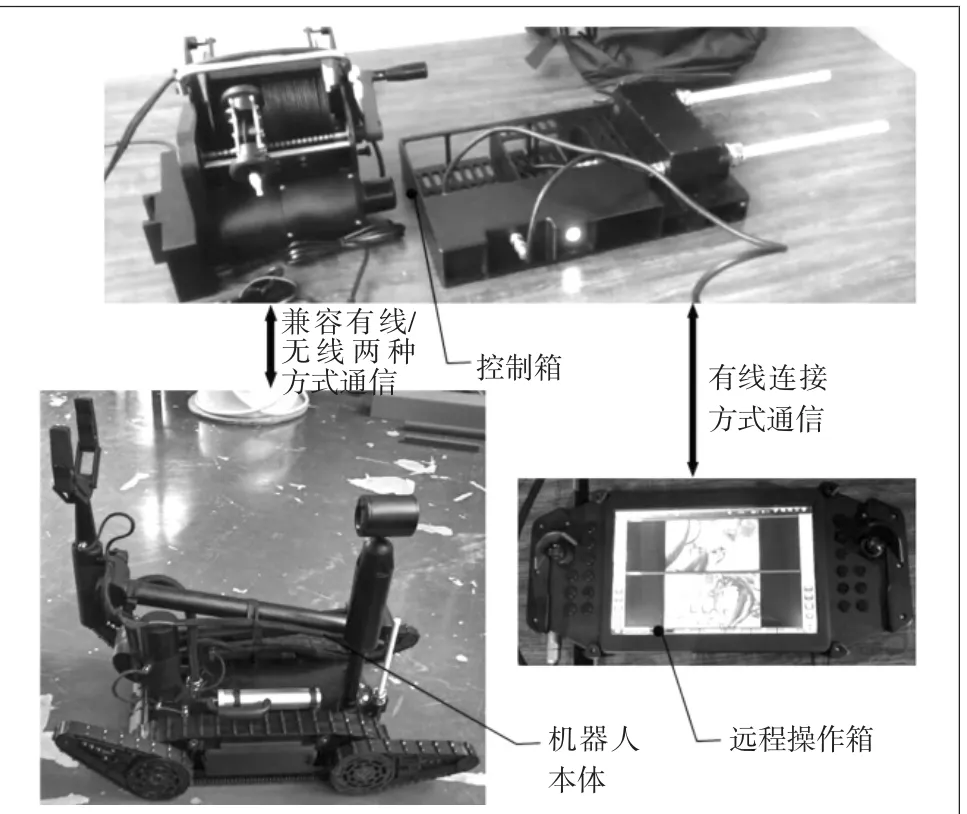
圖1 NEDRo系統總體結構
核應急處置機器人主要參數如下:質量為98.4 kg;耐γ輻照峰值劑量率為100 Gy/h,累計325 Gy;耐中子輻照,中子注量率為1.06×106n/(cm2·s),累計1.39×1010n/cm2中子注量;輻射探測范圍為0~10 Gy/h;越障性能,跨越150 mm高障礙物,攀爬31.7°斜坡。
核應急處置機器人研制所使用的電氣部件包括電動機、位置編碼器、電動機驅動器、主控板、無線通信模塊、光端機、鋰電池、交換機等,其中除電動機、位置編碼器、鋰電池未采用γ、中子屏蔽保護外,其它各電氣部件都采用專門的γ、中子屏蔽材料進行集中屏蔽防護,以提升各部件的耐輻照性能。
2 重要電氣部件輻照試驗描述
2.1 試驗系統組成
核應急處置機器人電氣部件抗輻射加固驗證試驗工作主要在中科院上海應用物理研究所、中國科學院核能安全技術研究所進行,通過目視、專用儀器、工器具等完成抗輻射加固各項功能、性能指標的驗證試驗。
1)γ輻射驗證輻射源。γ輻照試驗采用中科院上海應用物理研究所的γ輻射試驗裝置,如圖2所示。
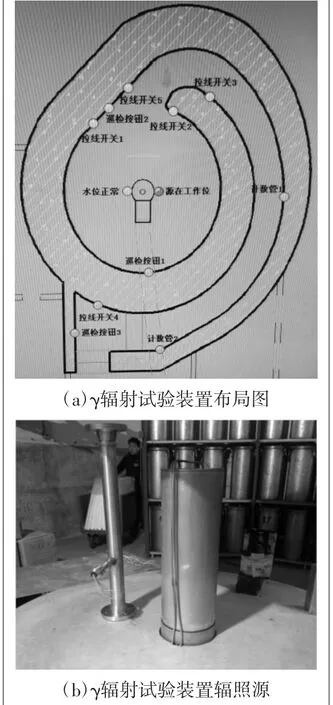
圖2 γ輻照試驗裝置
試驗裝置主要指標如下:輻照源強度為15.8 萬Ci;最小劑量率為72 Gy/h;最大劑量率為10 kGy/h。
2)強流聚變中子源裝置。中子輻照試驗采用中國科學院核能安全技術研究所的強流中子源與輻射技術綜合實驗平臺進行驗證試驗。試驗裝置如圖3所示。
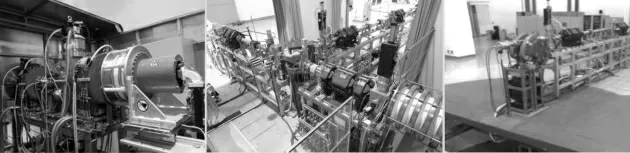
圖3 強流中子源實驗裝置
實驗裝置主要技術與性能指標:單能中子實驗條件為2.5 MeV/14 MeV;寬能譜中子實驗條件為熱中子~20 MeV;最高中子源強技術指標為1012n/s。
3)測試用儀器和設備。測試過程中所使用的儀器和設備如表1所示。
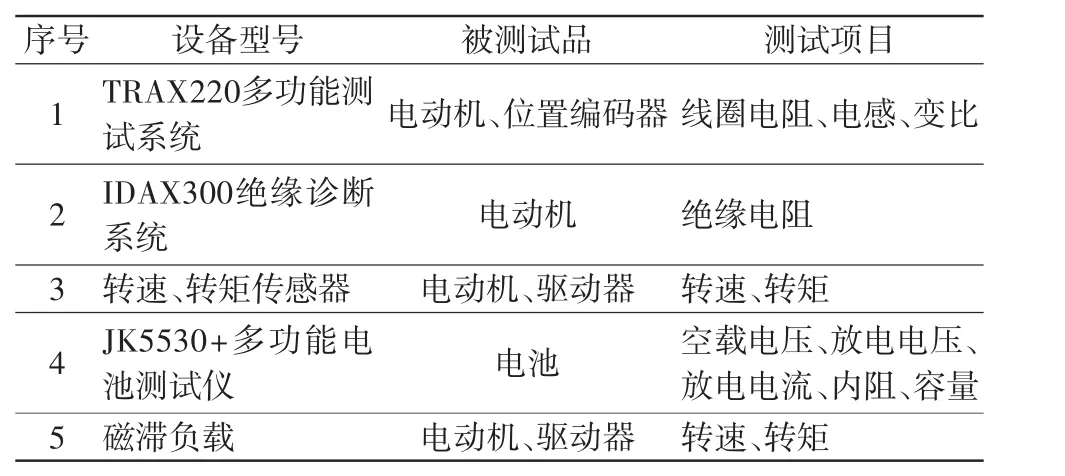
表1 控制系統測試用設備
4)被測對象。機器人重要電氣部件采用與機器人同樣型號的驅動器、主控板、無線模塊等組成的電氣部件性能測試模塊,用于對中子、γ輻照測試前后的電氣部件進行性能指標變化的測量、對比和功能驗證,被測的電氣部件如圖4所示。

圖4 被測重要電氣部件
被測的電氣部件型號如下:驅動器型號為Whi-20/100;主控板型號 為 Cm2 -500;無線模塊型號為UT1900-S;光端機型號為COE-B-4523-41-1;鋰電池規格為24 V、15.6 A·h;交換機型號為AOK-IES100501;伺服電動機;石墨電刷直流電動機;位置編碼器。
2.2 試驗環境選擇和條件
1)γ輻照試驗方案。γ輻照試驗時,根據本次輻照驗證試驗劑量率要求,在輻照室內預先測量好劑量率為100 Gy/h的多個位置,將機器人電氣部件放置在輻照室內,電氣部件前端面應放置在預設位置更靠近γ放射源處,以保證機器人重要電氣部件前端面γ劑量率不低于100 Gy/h。輻照測試期間,每隔特定時間進行重要電氣部件的功能驗證,以確認該段輻照期間各項功能正常。γ輻射試驗設備布局示意圖如圖5所示。
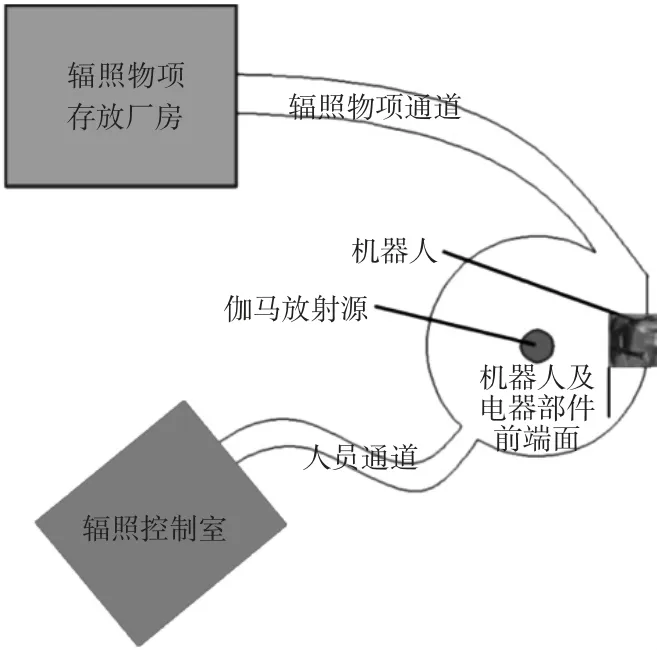
圖5 γ輻射試驗設備布局示意圖
2)中子輻照試驗方案。根據累計注量要求,擬將機器人電氣部件放置于試驗平臺上,對應輻照前端面的注量率水平為≥1×106n/(cm2·s),具體運行參數以樣品的實際尺寸及布放位置進行調整,最終達到≥1×1010n/cm2的累計注量。在中子累計注量達到要求后,等待環境劑量下降至許可水平,將其從輻照場內取出,在實驗室進行重要電氣部件功能驗證和性能指標測試,驗證電氣部件的抗中子輻射水平。
中子輻照試驗時試驗設備布局如圖6所示。
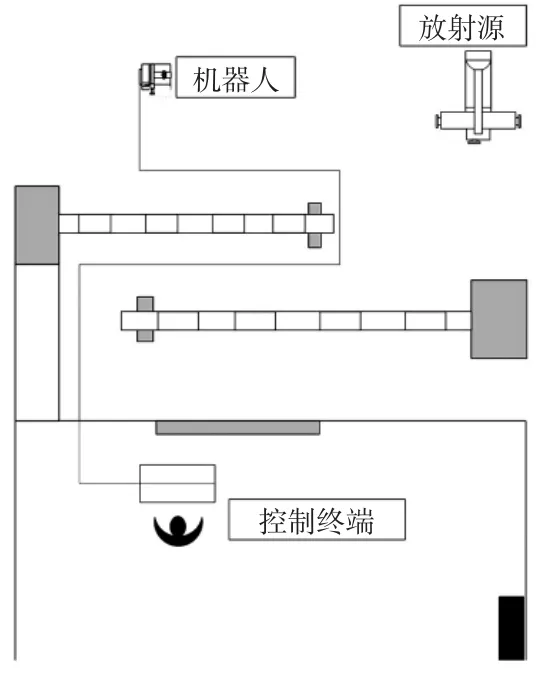
圖6 中子輻射試驗設備布局示意圖
2.3 試驗方法
2.3.1 基準判定
在非輻射環境條件下對機器人重要電氣部件的各項功能和性能進行驗證、測試,并在輻照前的驗證試驗結果記錄表中記錄測量結果,其測試數據作為抗輻射加固驗證試驗的數據基準。
2.3.2 中子抗輻射加固驗證試驗方法
在中科院合肥核能安全技術研究所進行中子輻照驗證試驗,采用強流中子源實驗裝置作為輻射源,環境溫度為室溫,主要完成以下驗證試驗:
1)在機器人電氣部件前端面中子注量率為106n/(cm2·s)的輻射場內,采用“原位在線”方式通過遠程操作平臺確認機器人電氣部件的各項功能是否正常。
2)累積輻射時間達到3 h,前端面中子注量達到1010n/cm2后,采用“原位在線”方式通過遠程操作平臺確認機器人電氣部件的各項功能是否正常。
3)將機器人電氣部件從輻射場內退出,在預先布置的無輻射測試區域進行電氣部件性能測試。
2.3.3 γ射線抗輻射加固驗證試驗方法
在中科院上海應用物理研究所進行驗證試驗,采用60Co作為輻射源,環境溫度為室溫,主要完成以下驗證試驗:
1)在機器人電氣部件前端面環境劑量率為100 Gy/h的輻射場內,采用“原位在線”方式通過遠程操作平臺確認電氣部件的各項功能是否正常。
2)累積輻射時間達到3 h,劑量達到300 Gy后,采用“原位在線”方式通過遠程操作平臺確認機器人電氣部件的各項功能是否正常。
3)將機器人電氣部件從輻射場內退出,在預先布置的無輻射測試區域進行機器人整體和電氣部件性能測試。
2.3.4 電動機測試方法
電動機測試通過采用專用儀器對輻照后的電動機線圈電阻、電感、絕緣電阻、轉矩和轉速等進行測量,以驗證輻照后對電動機性能影響。受測量條件和測量儀器耐輻照指標影響,電動機測試在輻照后的非輻照區進行。
1)線圈電阻和電感測試。測量伺服電動機A-B、B-C、C-A的線電阻和線電感,并將測量值轉換為25 ℃的換算電阻值。直流有刷電動機只需測試1個線圈的相電阻和相電感。
2)絕緣電阻測試。將電動機的所有線圈終端短接到一起,在終端和地之間施加測試電壓,讀取60 s時刻的電阻值。注意所施加的測試電壓不應超過線圈絕緣的額定電壓。
3)轉矩和轉速測試。電動機與轉矩、轉速傳感器和負載配合可得到電動機的轉速和轉矩特性曲線。將被測電動機、傳感器、磁滯負載通過聯軸器連接,并固定在測試平臺。通過控制磁滯負載輸入的勵磁電流,產生一定的轉矩,通過測量被測電動機、磁滯負載之間的傳感器參數,從而獲取被測電動機的轉矩和轉速特性[3]。
2.3.5 位置編碼器測試方法
位置編碼器測試通過采用專用儀器對輻照后的線圈電阻、電壓變比等進行測量,以驗證輻照后對位置編碼器性能的影響。受測量條件和測量儀器耐輻照指標影響,位置編碼器測試在輻照后的非輻照區進行。通過多功能測試系統測量位置編碼器的電阻,從而獲取線圈電阻。
2.3.6 鋰電池測試方法
鋰電池測試通過采用專用儀器對輻照后的鋰電池容量進行測量,以驗證輻照后對鋰電池性能的影響。受測量條件和測量儀器耐輻照指標影響,鋰電池測試在輻照后的非輻照區進行。
測量鋰電池容量時,通過對充滿電的鋰電池在測試儀內置負載范圍內持續放電,記錄起止時間,并通過積分計算獲得鋰電池容量[4]。
2.3.7 驅動器測試方法
驅動器的性能指標變化可以通過所連接電動機的實際輸出轉矩和轉速來測量分析。分別測試輻照試驗前后電動機輸出轉速和轉矩的實際值,再結合電動機輻照前后的線圈電阻和電感,可以分析驅動器在輻照實驗前后的輸出性能變化情況。
另外,通過采用原位在線的功能試驗測試驅動器的工作是否正常。將驅動器、電動機、主控板等連接好之后放置于輻射環境中,在電動機軸上安裝涂有顏色標志的圓盤,人員操作端通過線纜引出至非輻射環境。人員在遠端操控電動機按一定轉速旋轉,觀察電動機旋轉是否卡頓、是否停止等。
2.3.8 通信鏈路測試方法
通信鏈路分為有線模式和無線模式。兩種模式共同包含的元件包括交換機、主控板,無線模式還包括無線傳輸發射模塊,有線模式包括光端機。
有線通信鏈路測試采用原位在線測試。測試時,將驅動器、電動機、主控板、光端機等連接好之后放置于輻射環境中,在電動機軸上安裝涂有顏色標志的圓盤,人員操作端通過線纜引出至非輻射環境。人員在遠端通過光端機操控電動機啟停或者調速,觀察電動機是否按發送的指令響應,同時測試響應的實時性和成功率。
2.4 輻照測試結果
機器人電氣部件γ、中子輻照測試驗證如圖7所示。記錄機器人電氣部件輻照前后的性能測試數據。

圖7 機器人電氣部件γ及中子輻照
1)石墨電刷直流電動機。直流電動機的測試結果如表2所示。
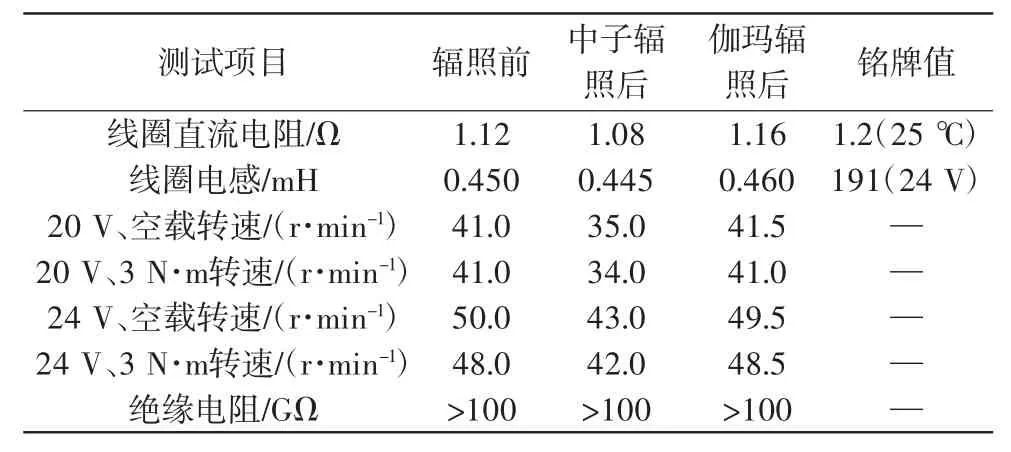
表2 直流電動機輻照前后性能對比
2)伺服電動機。伺服電動機的測試結果如表3所示。
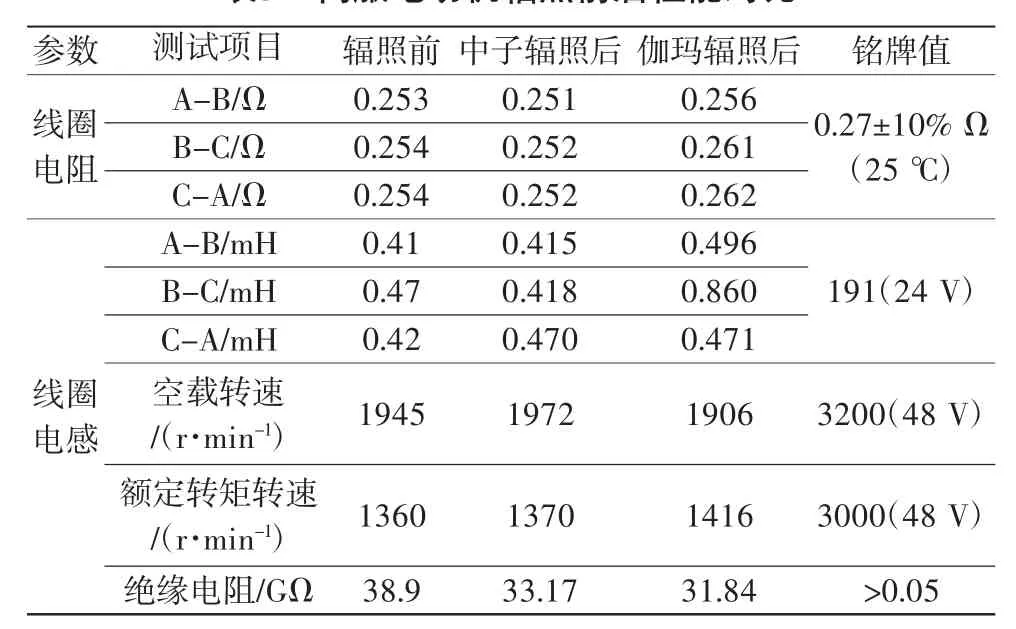
表3 伺服電動機輻照前后性能對比
3)鋰電池。鋰電池的測試結果如表4所示。

表4 鋰電池輻照前后性能對比
4)位置編碼器。位置編碼器的測試結果如表5所示。
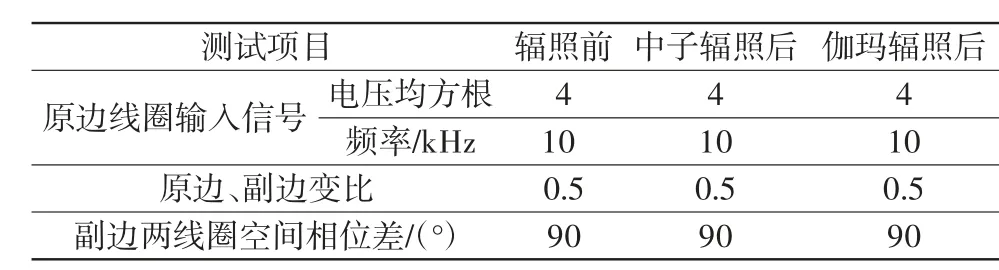
表5 位置編碼器輻照前后性能對比
5)驅動器。直流電動機和伺服電動機測試結果對比如表6所示。
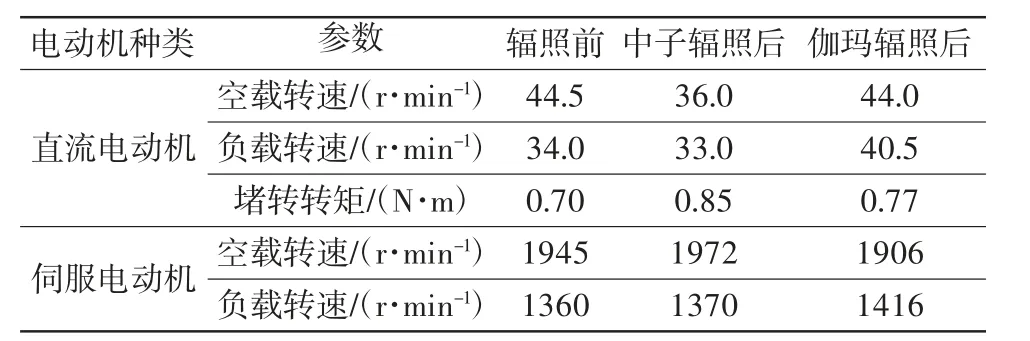
表6 用直流電動機和伺服電動機檢測驅動器性能對比
6)通信鏈路。光端機、交換機、光纖等組成的有線通信鏈路經過γ、中子屏蔽材料進行加固后,通過在原位在線輻照檢驗中未發現通信錯誤或明顯可見通信延遲;輻照完成后,交換機、無線模塊等組成的無線通信鏈路未發現通信錯誤或明顯可見通信延遲。
3 結論
1)未采取輻照加固的機械臂手抓監視攝像頭在峰值劑量率為100 Gy/h的γ輻照條件下,工作約1.67 h后失去工作能力,累計劑量約167 Gy,且在多次重啟后無法恢復。
2)鋰電池在1.06×106n/(cm2·s)中子注量率,在累計1.39×1010n/cm2中子注量后,可正常工作,但電池容量發現約4.2%下降;鋰電池在峰值劑量率為100 Gy/h,累計劑量為325 Gy的伽瑪射線條件可正常工作,鋰電池容量未發現變化。
3)直流有刷電動機、伺服電動機和位置編碼器等電氣部件未采用γ、中子屏蔽材料進行防護,在1.06×106n/(cm2·s)中子注量率,累計1.39×1010n/cm2中子注量后,可正常工作;在峰值劑量率為100 Gy/h,累計劑量為325 Gy的伽瑪射線條件可正常工作。
4)驅動器、光端機、無線模塊、交換機等采用γ、中子屏蔽材料進行加固后,在峰值劑量率為100 Gy/h,累計劑量為325 Gy的伽瑪射線條件正常工作,在1.06×106n/(cm2·s)中子注量率、累計1.39×1010n/cm2中子注量條件下功能正常。
