體感交互式上肢鏡像康復訓練機器人系統
2022-05-06 02:14:26劉慶祥郭冰菁韓建海李向攀黃明祥
工程設計學報 2022年2期
關鍵詞:機械
劉慶祥,郭冰菁,2,韓建海,2,3,李向攀,2,黃明祥
(1.河南科技大學機電工程學院,河南 洛陽 471003;2.河南省機器人與智能系統重點實驗室,河南 洛陽 471003;3.機械裝備先進制造河南省協同創新中心,河南 洛陽 471003)
近年來,經循證醫學證明鏡像療法是一種有效的臨床治療方法,可用于腦卒中后單側忽略癥患者或偏癱患者的上肢運動功能恢復[1]。鏡像療法的原理是:利用一面鏡子反射健肢動作,讓患者產生患肢運動的錯覺,以刺激其大腦產生運動意識,從而促使患肢運動功能重建。鏡像療法有效性的內在機制是人體大腦鏡像神經元的激活,從而促進大腦神經的可塑性[2-3]。鏡像療法已被廣泛應用于人體上肢康復的臨床治療。但傳統的鏡像治療存在一定的局限性:第一,患肢實際上是無法移動的,僅通過運動想象來促使大腦神經元重塑;第二,鏡像是通過鏡子反射產生的,因鏡像裝置的限制,臨床治療效果的穩定性會受到影響。因此,鏡像療法的實施亟須尋求創新突破[4]。
目前,已有很多學者針對鏡像療法的有效實施提出了多種方法,可歸納為以下2類。一類是將鏡像療法與虛擬現實技術結合,使患者產生身臨其境的沉浸感,增加康復治療的趣味性。如:岡山大學的Kenji等[5]開發了一個虛擬現實鏡像視覺反饋系統,其由計算機、手部動作捕捉數據手套、手臂移動跟蹤定位系統、顯示器和虛擬訓練游戲系統組成,患者通過穿戴數據手套來控制虛擬場景中的手臂移動,利用運動想象產生患肢抓取的錯覺。該系統可同時進行手腕和手指功能的康復訓練。奧塔哥大學的Hoermann等[6]開發了一個用于手部運動功能康復訓練的鏡像系統,通過攝像頭采集健康手的圖像,并在液晶屏幕上顯示其鏡像圖像,然后基于Unity3D軟件設計虛擬鏡像場景,以進行患肢手部的鏡像康復治療。另一類是將鏡像療法與上肢康復訓練機器人結合,使用機器人進行輔助訓練有利于上肢運動功能的恢復,彌補了傳統鏡像療法中患肢不能動的缺陷,促進了視覺和本體感覺的整合。如:Beom等[7]設計了一個可以實時運動的穿戴式兩軸機器人,用于偏癱患者手臂的康復訓練。該機器人的原理為:健肢一側的傳感器將位姿信息轉換為坐標信號并傳遞給患肢一側的機器人,以使患肢和健肢同步移動,通過兩肢體間的空間耦合效應促進患肢運動功能的恢復(其作用機制是在鏡像神經元作用下,一側肢體傾向于采用另一側肢體的空間特征)。在采用機器人輔助訓練的鏡像治療中,機器人通過鏡像對稱的映射運動來帶動患肢運動,形成雙側肢協同運動模式,使得未受損的大腦半球與受損的大腦半球相互作用,從而更好地誘導大腦運動皮層網絡的重組,促進皮層神經的可塑性[8-10]。
綜上所述,健肢運動鏡像的虛擬現實呈現和機器人輔助患者雙側肢協同運動均能有效改善傳統鏡像療法的不足,提高康復效率。基于此,筆者通過將鏡像康復理論、虛擬現實技術和機器人技術三者有效結合,提出了一種體感交互式上肢鏡像康復訓練機器人系統。該系統采用可穿戴式動作捕捉設備快速獲取患者健肢的位姿信息,并利用虛擬現實技術將健肢與健肢鏡像運動呈現到虛擬場景中,同時使用氣動機械臂牽引患肢作鏡像運動,以實現體感交互式鏡像康復訓練。
1 上肢鏡像康復訓練機器人系統結構
傳統的康復訓練機器人僅能根據醫師設置的康復軌跡機械地重復動作[11],患者只能被動地作跟隨運動。但是由于患者存在個體差異,偏癱程度不同的患者使用時應對康復訓練機器人設定的期望軌跡做出調整,以增加康復過程中的舒適性[12]。因此,在康復訓練機器人輔助患者康復治療的過程中,如何實現良好的人機交互、人機共融已成為迫切的需求。為了使康復訓練機器人更好地服務患者以及實現自然有效的人機交互,提出一種體感交互式上肢鏡像康復訓練機器人系統,其總體布局如圖1所示。
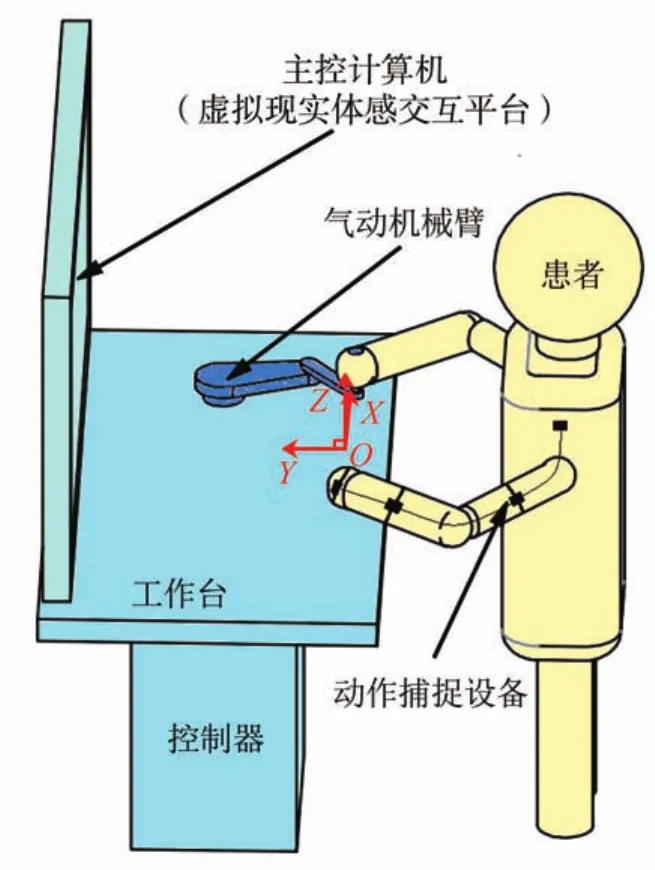
圖1 體感交互式上肢鏡像康復訓練機器人系統的總體布局Fig.1 Overall layout of somatosensory interactive upperlimb mirror rehabilitation training robot system
體感交互式上肢鏡像康復訓練機器人系統主要包括主控計算機(搭載虛擬現實體感交互平臺)、控制器、可穿戴式動作捕捉設備、二自由度氣動機械臂和工作臺。其中,可穿戴式動作捕捉設備主要用于采集患者健肢的位姿信息;氣動機械臂為平面連桿結構,其關節由擺動氣缸驅動,其末端與患肢末端(手部)相連,通過末端牽引的方法進行康復訓練[13]。在主控計算機端搭載的虛擬現實體感交互平臺中建立實時同步的人體模型以及康復訓練虛擬場景,然后基于人機鏡像運動映射算法將患者健肢位姿信息換算為鏡像后氣動機械臂的運動軌跡,并生成相應的控制信號發送至氣動機械臂的控制器,以實時控制氣動機械臂帶動患肢作鏡像運動。
所設計的上肢鏡像康復訓練機器人系統適用于上肢偏癱患者。該系統以患者健肢為主端,通過動作捕捉設備將健肢動作輸入到虛擬現實體感交互平臺中,健肢動作被鏡像映射為患肢動作并同步到虛擬場景中,虛擬場景中的健肢鏡像動作通過視覺反饋給患者,以刺激患者大腦中控制患肢運動的神經元,從而實現數字化鏡像治療。同時,健肢動作的鏡像映射軌跡作為康復訓練機器人的期望軌跡,由機器人帶動患肢作鏡像運動,促進患肢運動功能恢復。相對于傳統的鏡像治療和機器人輔助訓練,所設計的系統采用人體大腦和肢體雙閉環的康復思想,在實現視覺反饋的鏡像治療的同時促使雙側肢協同運動,有利于患者大腦皮層神經元重塑和患肢運動功能恢復。此外,由于健肢運動更符合患肢自身的用手習慣,使用健肢運動映射控制康復訓練機器人的運動更具有個性化特征[14]。
2 上肢鏡像康復訓練機器人的控制系統
2.1 控制系統組成
體感交互式上肢鏡像康復訓練機器人控制系統的硬件主要包括主控計算機、LinksRT半實物仿真機、比例壓力閥、旋轉編碼器、擺動氣缸和VD_Suit動作捕捉設備,如圖2所示。
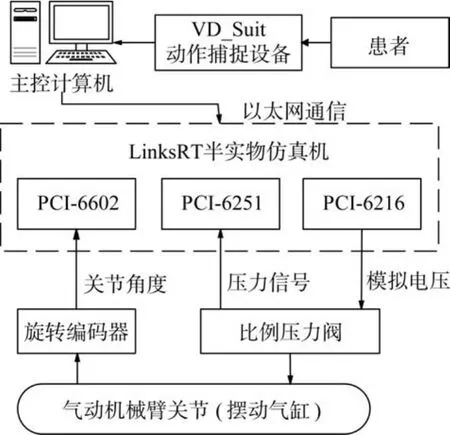
圖2 體感交互式上肢鏡像康復訓練機器人控制系統框圖Fig.2 Control system block diagram of somatosensory interactive upper-limb mirror rehabilitation training robot
體感交互式上肢鏡像康復訓練機器人的控制系統基于VD_Suit動作捕捉設備采集的患者健肢的位姿信息,實現健肢與氣動機械臂的運動映射;以LinksRT半實物仿真機作為控制器,其中,PCI-6602計數器板用于采集旋轉編碼器信號以獲取氣動機械臂的關節角度,PCI-6251多功能采集板卡用于采集擺動氣缸的壓力信號,PCI-6216模擬量輸出卡用于控制比例壓力閥的出口壓力,從而控制氣動機械臂運動。基于MATLAB/Simulink軟件建立氣動機械臂的控制模型,并在實際搭建的物理樣機上完成半實物仿真,可以方便地調試控制算法,從而快速地驗證其有效性。
2.2 控制策略設計
氣動系統最大的優點是柔順性好,其被廣泛應用于各類柔性場合。氣動系統能夠在完成作業任務的同時保證使用者的安全和對環境的友好性。但是,由于氣體的可壓縮性大,使得氣動系統在控制穩定性方面較電機驅動系統差。另外,氣動系統的低阻尼比特性使其伺服控制的響應不夠穩定。當氣缸低速工作時,因受摩擦力矩的強非線性和低阻尼特性的影響,氣缸在響應過程中出現“爬行”現象。因此,設計合適的控制策略來改善氣動系統的伺服控制響應特性尤為重要。根據氣動系統的特性,本文氣動機械臂采用PD(proportional differential,比例微分)+速度前饋補償的控制策略,如圖3所示。其中,PD控制能夠增大系統阻尼,提高穩定性;速度前饋補償可有效消除系統的遲滯,從而滿足康復軌跡跟蹤的控制需求。
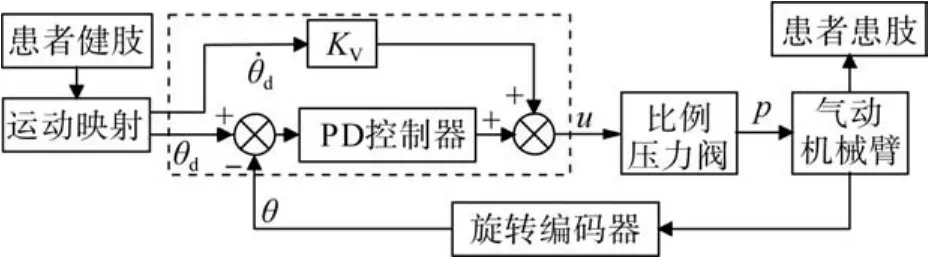
圖3 氣動機械臂的PD+速度前饋補償控制策略框圖Fig.3 Block diagram of PD+speed feedforward compensation control strategy of pneumatic manipulator
基于圖3,PD+速度前饋補償控制策略可表示為:
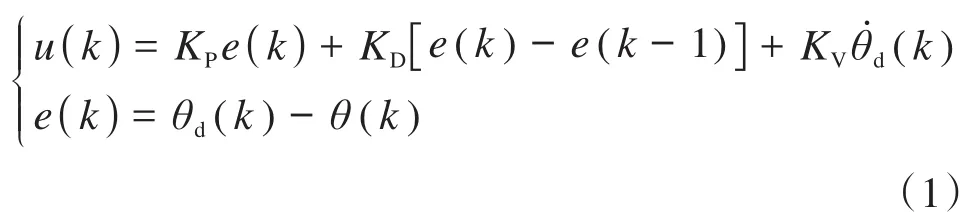
式中:θd(k)為氣動機械臂關節的期望角度;d(k)為氣動機械臂關節的期望角速度;θ(k)為氣動機械臂關節的實際角度;u(k)為比例壓力閥的控制電壓;KP為比例增益;KD為微分增益;KV為速度前饋增益;e(k)為位置誤差。
3 人機鏡像運動映射算法
體感交互式上肢鏡像康復機器人實現鏡像控制的關鍵是獲取穩定的患者健肢位姿信息,并通過運動映射算法將其轉換為氣動機械臂的期望軌跡。本文通過VD_Suit動作捕捉設備來采集患者健肢的位姿信息[15],將其映射為氣動機械臂末端的位置并規劃氣動機械臂各關節的轉動角度,實現體感交互控制。
運動映射的目的是讓氣動機械臂牽引患者患肢按健肢的鏡像運動進行康復訓練[16]。目前,常用的運動映射方法主要包括末端映射、關節映射和關鍵點映射。對于主端和從端結構不一致(異構)的遙操作系統,無法在關節空間中建立二者的映射關系。在所設計的上肢鏡像康復訓練機器人系統中,氣動機械臂與患者健肢為異構映射,且采用末端牽引的方式帶動患肢,故本文選擇末端映射的方法。該方法的優點是映射算法簡單,且不需要考慮主、從端的結構和角度關系。在笛卡爾坐標系中,建立患者健肢末端位置與氣動機械臂末端位置的映射關系,即將健肢末端的工作空間與氣動機械臂末端的工作空間進行配準,從而實現健肢末端位姿與氣動機械臂末端位姿的對應[17]。一般情況下,運動映射需要分別建立主、從端的運動學方程和工作空間,通過設計人機鏡像運動映射算法來將健肢末端位置轉換成氣動機械臂末端的目標位置,隨后通過求解運動學逆解來規劃其關節轉動角度,以實現主從跟隨運動。在本文的上肢鏡像康復訓練機器人系統中,動作捕捉設備將采集到的患者健肢的位姿信息直接傳輸至虛擬場景中的人體模型,而后Unity3D軟件(搭載非常強大的物理和動畫引擎)直接提取健肢末端的位姿信息,無須進行復雜的運動學建模。綜上,提出一種基于工作空間的人機鏡像運動映射算法,如圖4所示。其中:為患者健肢末端Pm在健肢工作坐標系下的位置;為患肢末端Ps在患肢工作坐標系下的期望位置(由健肢末端位置鏡像映射得到);XP、YP為氣動機械臂末端P在機械臂基坐標系下的位置(由患肢末端期望位置經坐標系轉換后得到)。
第三,社團缺乏科學的理論指導,發展勢頭不強勁。調查中61.9%的人認為社團活動凝聚力低,社會輻射力差。主要原因在于對學生社團組織發展缺乏理性的指導,雖然每個社團都配備1~2名指導教師,但高校在社團管理辦法中,對指導教師的責權利等缺乏明確規定,未能充分調動指導教師的積極性,有些指導教師對社團活動從不參與或指導很少。社團是自發組織,學生缺乏系統的思想理論,在建設社團過程中難免發展后勁不足。
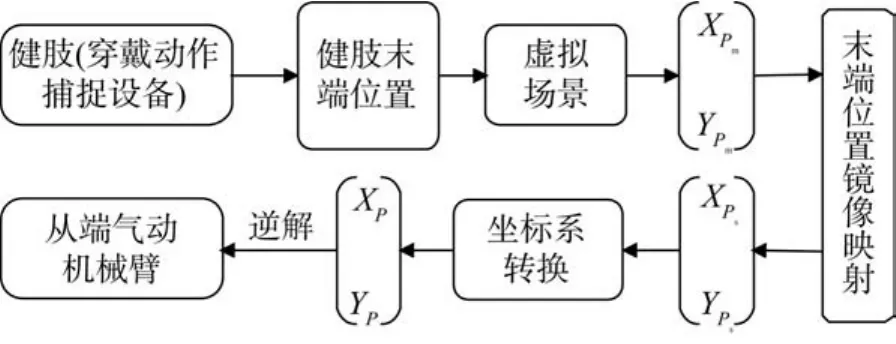
圖4 基于工作空間的人機鏡像運動映射算法Fig.4 Human-machine mirror motion mapping algorithm based on workspace
主、從端工作空間的匹配是實現異構遙操作系統有效控制的基礎[18-19]。在本文的上肢鏡像康復訓練機器人系統中,主端健肢穿戴的動作捕捉設備的工作空間為三維空間,可采集360°全方位的位姿信息,而從端氣動機械臂末端只能作平面移動且可達范圍有限,因此須對通過動作捕捉設備獲取的健肢末端工作空間進行限定[20]:忽略垂直于工作臺的Z向位移,將健肢末端的工作空間限定在與氣動機械臂末端工作空間對應的一定范圍的平面內,僅將健肢末端在該平面內的位移視為有效信號。對氣動機械臂末端的工作空間進行分析,并建立其運動學模型。二自由度氣動機械臂的結構及各坐標系之間的關系如圖5所示。其中:XOY為世界坐標系,X1O1Y1為以氣動機械臂大臂關節為原點構建的基坐標系,X2O2Y2為以氣動機械臂小臂關節為原點構建的坐標系。
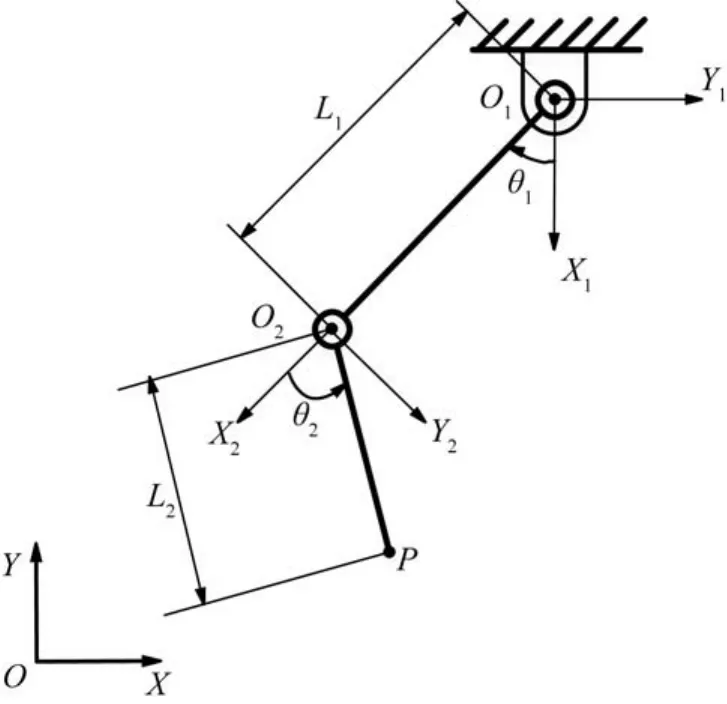
圖5 二自由度氣動機械臂結構簡圖及坐標系構建Fig.5 Structure diagram of two-degree-of-freedom pneumatic manipulator and coordinate system construction
利用幾何法建立二自由度氣動機械臂末端的正運動學方程,可表示為:

式中:θ1、θ2分別為氣動機械臂大、小臂關節的轉動角度,以逆時針方向為正向;L1、L2分別為氣動機械臂大、小臂的長度。
根據二自由度氣動機械臂末端的正運動學方程,得到其末端的工作空間,如圖6所示。
對于基于工作空間的人機鏡像運動映射算法,需要將人體健肢末端的位置映射到牽引患肢的氣動機械臂末端的工作空間中,建立健肢末端與氣動機械臂末端工作空間的鏡像映射關系,如圖7所示。圖中:XmOmYm為健肢工作坐標系,XsOsYs為患肢工作坐標系,其坐標軸方向相同。
基于工作空間的人機鏡像運動映射算法采用點到點的方式控制氣動機械臂運動。基于上述定義的坐標系,得到健肢工作坐標系與患肢工作坐標系的鏡像變換矩陣sTm:
式中:KX、KY為X、Y向上的比例映射系數。

式中:Pm為健肢末端在健肢工作坐標系中的位置矢量;Ps為患肢末端在患肢工作坐標系中的位置矢量。
當氣動機械臂工作時,其末端與患肢末端相連。為了求解氣動機械臂末端在基坐標系X1O1Y1中的位置,需對患肢末端位置矢量進行坐標轉換,轉換過程如下:

式中:P為氣動機械臂末端在基坐標系X1O1Y1中位置矢量;Pso為患肢工作坐標系原點在基坐標系X1O1Y1中的位置矢量;Rs為患肢工作坐標系XsOsYs與基坐標系X1O1Y1的旋轉矩陣。
設患肢工作坐標系XsOsYs相對于氣動機械臂基坐標系X1O1Y1的旋轉角為φ,則旋轉矩陣可表示為:

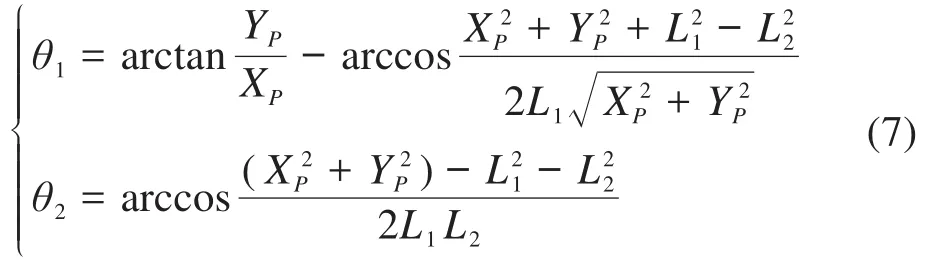
通過求氣動機械臂末端的運動學逆解可得到其關節的轉動角度。利用幾何法求得氣動機械臂的逆運動學方程,根據其工作情況,取,可得:
4 試驗驗證
4.1 樣機試驗平臺搭建
為了測試體感交互式上肢鏡像康復訓練機器人系統的性能,搭建了如圖8所示的樣機試驗平臺,其由主控計算機、LinksRT仿真機(內置控制器及擴展板卡)、二自由度氣動機械臂和VD_Suit動作捕捉設備組成。該上肢鏡像康復訓練機器人系統設有被動康復訓練和主動康復訓練兩種模式。其中:對于被動康復訓練模式,氣動機械臂末端的軌跡完全按照動作捕捉設備采集的患者健肢末端位置信息(或理療師的康復訓練動作軌跡)映射得到;對于主動康復訓練模式,患者患肢具有一定的運動功能,患者可主動跟隨健肢運動過程,自適應調節氣動機械臂控制的阻抗系數,提高患肢在康復過程中的參與度。由于軌跡控制是機器人康復訓練的基礎,首先通過單關節軌跡跟蹤試驗來分析上肢鏡像康復訓練機器人系統的運動跟蹤特性,然后通過復合運動軌跡規劃試驗對其多關節協調控制進行驗證,最后通過鏡像康復訓練試驗對所設計的人機鏡像運動映射算法和控制策略的有效性進行驗證。

圖8 體感交互式上肢鏡像康復訓練機器人系統樣機試驗平臺Fig.8 Somatosensory interactive upper limb mirror rehabilitation training robot system prototype test platform
4.2 單關節軌跡跟蹤試驗
為保證氣動機械臂運動的穩定性,須對PD+速度前饋補償的控制算法進行參數調整。為了測試氣動機械臂關節的軌跡跟蹤響應特性,根據康復訓練中人體上肢關節活動度和康復運動周期,選擇峰值為40°、周期為6 s的正弦信號作為氣動機械臂關節的期望軌跡信號,對其2個關節單獨進行軌跡跟蹤試驗。氣動系統氣源壓力設為0.6 MPa,試驗參數如表1所示,氣動機械臂各關節的軌跡跟蹤曲線如圖9所示。
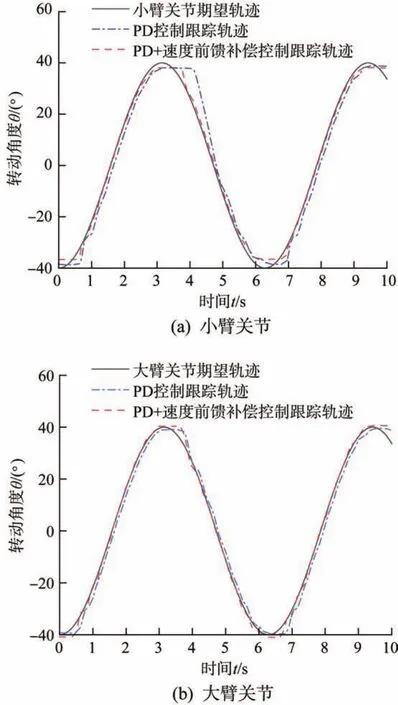
圖9 氣動機械臂關節軌跡對比Fig.9 Trajectory comparison of pneumatic manipulator joints
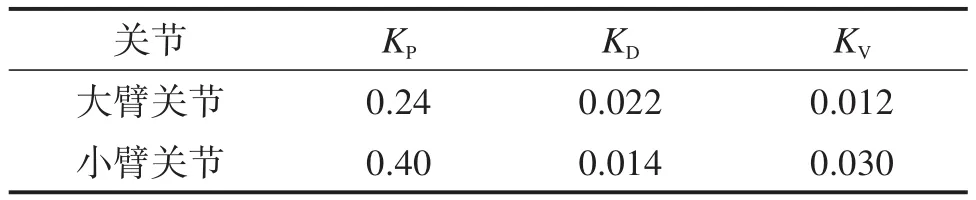
表1 氣動機械臂的PD+速度前饋補償控制參數Table 1 PD+speed feedforward compensation control parameters of pneumatic manipulator
通過對比基于PD控制和PD+速度前饋補償控制的氣動機械臂單關節軌跡跟蹤曲線,可以看出采用PD+速度前饋補償控制后氣動機械臂的遲滯得到了明顯優化;拐點處關節的轉動角度存在誤差是因為當關節進行屈/伸轉換時,擺動氣缸需要換向,此時比例壓力閥兩端的壓差變化較大,且在換向過程中存在的摩擦及沖擊等不確定性因素,導致氣動機械臂關節的軌跡跟蹤存在誤差。采用PD+速度前饋補償控制時,氣動機械臂大、小臂關節軌跡跟蹤的平均誤差分別為0.8°和1.5°,軌跡跟蹤的均方根誤差分別為0.8°和1.0°。由此可以看出,基于比例壓力控制的氣動機械臂的運動跟蹤特性符合康復訓練的要求。
4.3 復合運動軌跡規劃試驗
在上肢鏡像康復訓練機器人的安全工作空間內,以康復訓練時常用的平面畫圓動作為例規劃訓練軌跡,軌跡圓心在氣動機械臂基坐標系X1O1Y1中的坐標為(308.15,0)m、軌跡半徑100 mm。該圓形軌跡的函數表達式為:
為了使氣動機械臂具有較好的運動特性,即保證其速度與加速度連續,利用S形曲線對氣動機械臂末端的軌跡進行插值處理。然后基于氣動機械臂的逆運動學方程,求解其2個關節的角位移規劃曲線,從而獲得復合運動規劃軌跡。由于樣機處于試驗階段,選擇多位健康人員進行試驗。本文選取其中2位測試者的試驗數據進行分析。測試者1:身高為168 m,體重為65 kg;測試者2:身高為175 m,體重為75 kg。設定運動周期為10 s,則規劃的氣動機械臂末端軌跡如圖10中實線所示。測試者1使用時氣動機械臂末端的實際軌跡如圖10中虛線所示,測試者2使用時氣動機械臂末端的實際軌跡如圖10中點線所示。
測試者1和測試者2使用時,氣動機械臂末端X、Y向的軌跡分別如圖11(a)和圖11(b)所示。畫圓的康復動作是氣動機械臂大、小臂關節的旋轉運動的合成運動,大、小臂關節軌跡的變化曲線分別如圖11(c)和圖11(d)所示。對比試驗曲線可知,曲線平滑連續,無突變及抖動現象氣動,氣動機械臂運動平穩,跟蹤誤差主要出現在剛開始和結束處,開始時比例壓力閥送入擺動氣缸兩腔的氣體的壓差變化大,導致氣動機械臂不穩定,從而產生了較大的誤差;而結束時壓差變化小導致氣動機械臂因驅動力不足而無法克服系統阻尼,從而產生了較大的誤差。

圖11 做畫圓動作時氣動機械臂末端X、Y向軌跡及其關節軌跡對比Fig.11 Comparison of X and Y directional trajectories of end and joint trajectories of pneumatic manipulator during drawing a circle
表2所示為測試者做畫圓動作時氣動機械臂的軌跡跟蹤誤差。其中:在測試者1使用時,氣動機械臂末端X、Y向位置的平均誤差分別為1.5 mm和4.3 mm,均方根誤差分別為1.6 mm和5.4 mm;大、小臂關節轉動角度的平均誤差分別為0.8°和1.5°,均方根誤差分別為0.7°和1.3°。在測試者2使用時,氣動機械臂末端X、Y向位置的平均誤差分別為1.1 mm和3.5 mm,均方根誤差分別為1.4 mm和2.2 mm;大、小臂關節轉動角度的平均誤差分別為0.7°和1.2°,均方根誤差分別為0.6°和0.9°。通過對比各項誤差可知,對于不同使用者,氣動機械臂的軌跡跟蹤誤差均較小,均符合系統要求,說明所設計的上肢鏡像康復訓練機器人系統具有普適性。在實驗中,不同人使用時氣動機械臂軌跡跟蹤誤差不同主要是因為體重的影響,測試者2較重,導致氣動機械臂阻尼增大,這在一定程度上改善了氣動系統的穩定性。結果表明,在機器人輔助的雙側上肢訓練中,考慮增加驅動柔性采用的氣壓驅動關節,在運動過程中的位置精度及軌跡跟蹤精度、速度均滿足上肢康復訓練的要求。
4.4 鏡像康復訓練試驗
為實現氣動機械臂牽引患肢跟隨健肢作同步的鏡像運動,首先建立主控計算機中的虛擬環境與仿真機之間的TCP(transmission control protocol,傳輸控制協議)通信,其次根據動作捕捉設備采集的健肢位姿數據進行鏡像運動映射,得到氣動機械臂末端的位置信息,然后通過TCP通信傳輸給仿真機,通過求運動學逆解得到氣動機械臂各關節的轉動角度,最后控制比例壓力閥對氣動機械臂各關節進行伺服驅動。
同樣由健康人進行鏡像康復訓練功能的驗證。操作者穿戴動作捕捉設備坐在樣機前方,一側手(主手,模擬患者健肢)放在桌面初始位置,另一側手(從手)抓住氣動機械臂末端。對動作捕捉設備進行標定后,主手在桌面有效工作空間內作一系列平面運動,基于采集的位姿信息,通過人機鏡像運動映射算法得到氣動機械臂末端的軌跡,并與其實際軌跡進行對比。本試驗中,操作者主手畫方形圖案作為康復訓練的運動軌跡,利用動作捕捉設備采集相應的位姿信息,氣動機械臂運動軌跡由旋轉編碼器反饋。康復訓練時氣動機械臂末端的映射軌跡及實際軌跡如圖12所示。

圖12 康復訓練時氣動機械臂末端的軌跡對比Fig.12 Trajectory comparison of pneumatic manipulator end during rehabilitation training
由圖12可知,由于人體上肢運動具有一定的抖動,所映射的期望軌跡是不規則的,但氣動機械臂的運動跟蹤性能良好,使得偏差在康復訓練允許范圍之內;氣動機械臂的康復動作與主手動作相符,可以較好地進行相同動作的牽引訓練。通過對比驗證了氣動機械臂運動跟蹤響應的快速性、穩定性和可行性,表明所設計的人機鏡像運動映射算法和控制策略是有效的。
5 結論
本文開發的體感交互式上肢鏡像康復訓練機器人系統結構簡單,操作方便以及控制方式新穎。患者可以直接通過穿戴動作捕捉設備采集健肢位姿信息來控制氣動機械臂運動,從而輔助患者進行雙側肢協同運動的鏡像訓練,使鏡像療法與機器人輔助訓練相輔相成。經試驗驗證,動作捕捉設備獲取人體上肢位姿信息后,通過人機鏡像運動映射算法能夠有效地將健肢位姿信息轉換為氣動機械臂的運動軌跡,并牽引患肢完成康復訓練。所設計的PD+速度前饋補償控制算法實現了氣壓機械臂的運動控制,其在運動過程中的軌跡跟蹤誤差較小,運動平穩,能滿足康復訓練的要求。后續將在主動康復訓練模式下對輔助力控制和機器人阻抗控制方面開展進一步研究。由于目前仍處于實驗室試驗階段,并未開展臨床試驗,為更全面地評價該上肢鏡像康復訓練機器人系統的效果,還有待進一步開展臨床試驗。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
