5G網絡中無人機-車輛場景非平穩信道特性分析
2022-05-10 01:40:24劉光敬余紅朝
無線電工程 2022年5期
關鍵詞:模型
楊 爽,劉光敬,余紅朝
(重慶市信息通信咨詢設計院有限公司,重慶 400041)
0 引言
新型通信技術的第五代通信系統(5G)對信道建模提出了更高的要求。無線信道建模最大的挑戰是建立高效準確的信道模型,以模擬現實場景無線通信系統的所有傳播特性。近年來,無人機具有簡單、靈活、易操作等優點,在無線通信領域得到了廣泛應用,無人機對車輛信道建模研究是5G信道建模中最熱門的研究課題之一[1-5]。在無人機-車輛場景中,無人機與車輛周圍被大量的散射體包圍,且無人機與車輛的高移動性導致傳播環境在短時間內發生急劇變化,這些均使信道建模更具挑戰性和復雜性[6-9]。
大量研究表明,由于商業原因,目前無人機通常停留在較低的高度,以提供可靠通信[10-11],因此,在信道建模時需要考慮無人機高度的影響。一方面,在開闊室外場景,收發端之間通常不存在明顯遮蔽物,視距(Line-of-Sight,LOS)傳播為主要傳輸路徑;另一方面,在室外地形復雜情況下,多路徑傳輸才能保障通信質量。此外,無人機和車輛的高移動性難免使信道在時域上長期處于非平穩狀態,換句話說,寬平穩信道這一前提已不符合無人機-車輛非平穩信道環境[12-14]。文獻[15]中基于WINNER II 信道模型,對無人機信道模型進行初步模擬,但對非平穩特性的模擬效果不太明顯。文獻[16]提出了一種無人機-無人機單圓柱幾何隨機模型,該模型對收發端無人機散射體分布使用一個同心圓柱來進行模擬,忽視了無人機散射體獨立分布的特點。文獻[17]假設散射體分布在2個規則的圓環上,且假設收發端與散射體之間的相對距離保持不變,這與實際情況不符;另外,基于高斯-馬爾科夫過程建立模型使算法復雜度較高且難以實現。文獻[18]采用雙圓柱模型對車輛-車輛通信進行建模,較好地模擬了車輛場景,但車輛環境更適合球體模擬,車輛天線高度可以簡化。
通過以上分析,本文在以往研究的基礎上,提出了一種新型無人機-車輛非平穩信道模型。具體地,采用同心圓柱體來表征無人機周圍散射體分布范圍,并采用半球體來表征車輛周圍散射體的分布,假設無人機飛行高度恒定,而飛行速度不另設限。此外,測量數據顯示,散射體會出現多次,所以,為盡量符合真實環境,本文非視距(Non-Line-of-Sight,NLOS)分量中采用二次散射徑隨機生成散射體個數。最后根據建立的信道模型對其時間自相關函數、空間互相關函數和多普勒頻譜密度進行數學推導,進一步分析新模型信道特性。
1 信道模型與信道特性分析
1.1 信道沖激響應
無人機與車輛通信在真實場景中,無人機與車輛都是移動狀態,在移動過程中,信道環境中的散射體分布是不斷變化的,信道狀態呈現非平穩特性,這里給出了無人機與車輛在城市復雜環境的通信場景圖,如圖1所示。
結合信道狀態,采用同心圓柱體來表征無人機周圍散射體分布范圍,并采用半球體來表征車輛周圍散射體的分布,明顯地,視距與非視距分量同時存在,因此,該信道幾何隨機模型如圖2所示。
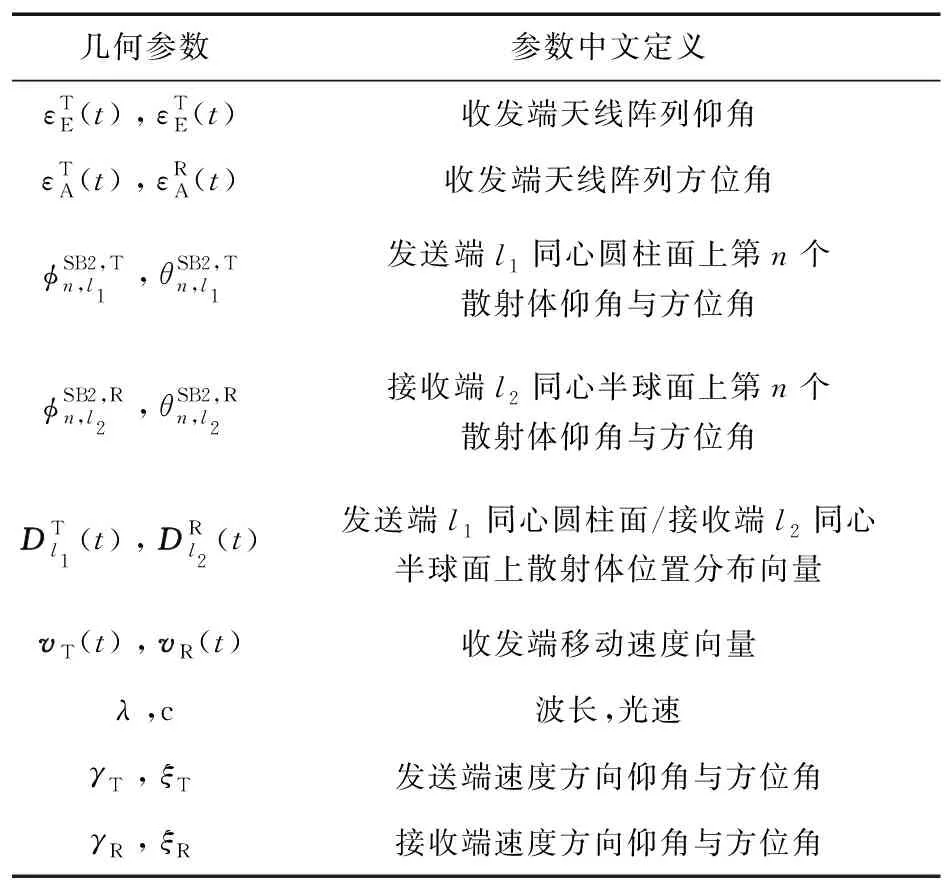
表1 幾何參數定義Tab.1 Definition of geometric parameters

(1)
式中,Nl1表示總共同心圓柱面個數;Nl2表示總共同心半球面個數;τLOS表示視距時延;τ(l1,l2)表示經過l1同心圓柱面和l2同心半球面上二次散射徑時延,視距分量進一步表示為:
(2)
(3)

1.2 信道參數描述
1.2.1 LOS描述
t時刻,第k根接收天線向量和第l根發射天線向量分別描述為:
(4)
(5)

(6)
(7)
(8)
(9)
1.2.2 NLOS描述
t時刻,發送端第l1圓柱平面上第n1個散射體位置矢量描述為:
(10)
同理,接收端第l2圓柱平面上第n2個散射體位置矢量描述為:
(11)

(12)
(13)

1.2.3 角度參數
假設發射端和接收端的方位角和仰角分布服從二維von Mises 分布 ,其中方位角和仰角是相互獨立的。因此,聯合概率密度函數為:
(14)
1.3 信道統計特性計算
1.3.1 空時相關函數
根據信道相關函數公式,對信道是空時相關函數進行了推導,其相關函數表達為:
(15)
式中,(·)*為復共軛,將式(1)代入式(14)得視距與非視距下的信道時空相關函數為:
(16)
(17)
式中,E(·)表示期望;Ω0進一步表示為:

(18)
1.3.2 空間相關函數
將式(15)~式(17)中Δt賦為0,則上述空時相關函數可變換為如下空間互相關函數(Cross-Correlation Function,CCF):
(19)
(20)
(21)

1.3.3 時間相關函數
將δT=0和δR=0代入式(15)~式(17),則上述空時相關函數可變換為如下時間自相關函數(Temporal Autocorrelation Function,ACF)
(22)
(23)
(24)
1.3.4 多普勒功率密度譜
多普勒功率密度譜(Doppler Power Spectral Density,DPSD),Sl1,l2(f,t)是時域ACF的傅里葉變換,可以表示為:

(25)
2 仿真分析
為了進一步研究無人機-車輛幾何隨機信道模型的信道特性,同時驗證推導信道統計特性公式的正確性,不失一般性地,主要仿真參數(角度均采用弧度制計算)如表2所示。
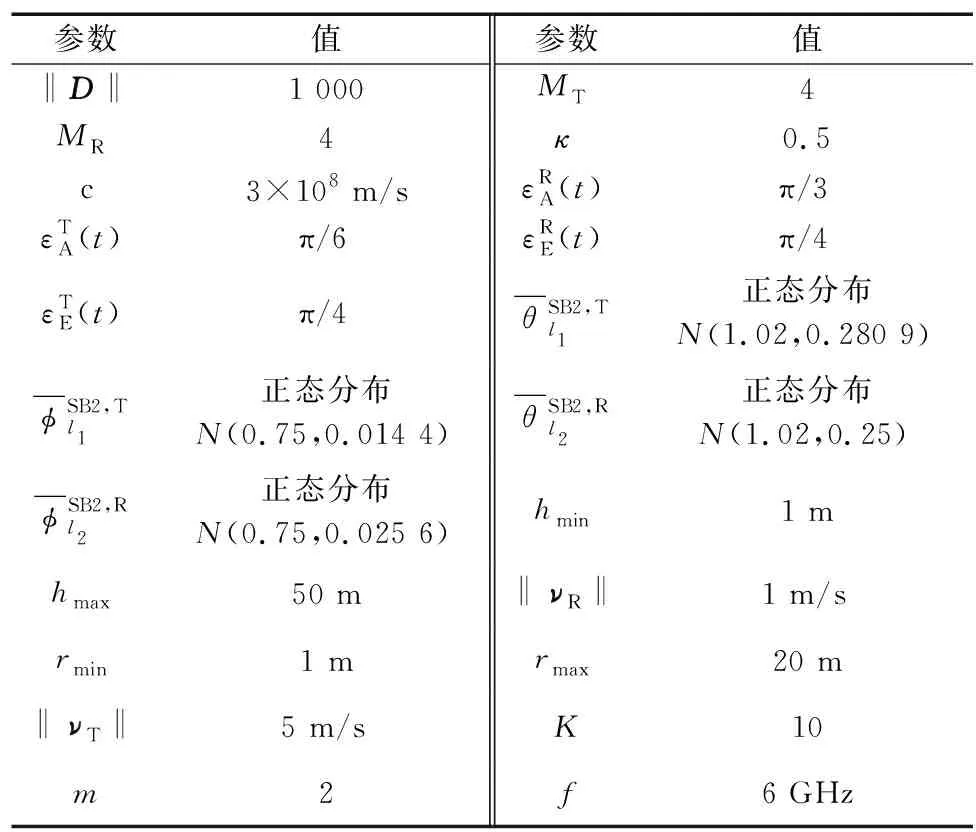
表2 主要仿真參數Tab.2 Configurations of simulation parameter
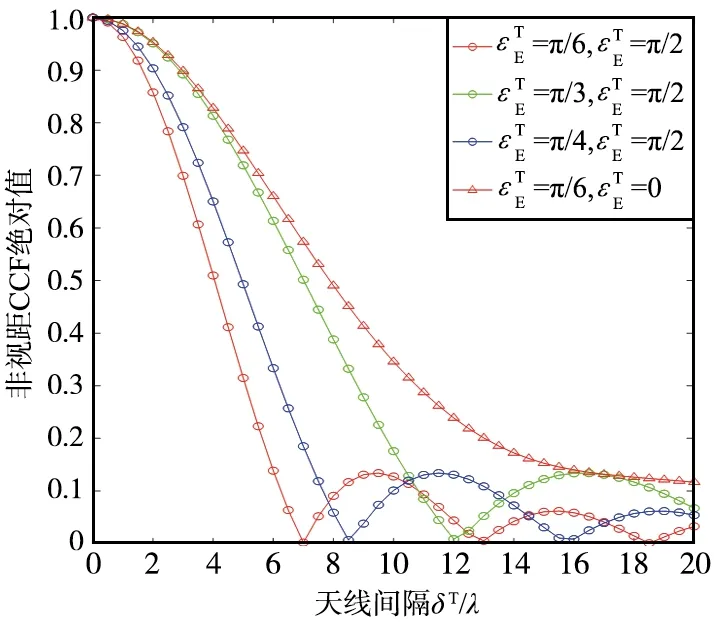
(a) 不同的無人機天線仰角下的CCF變化曲線
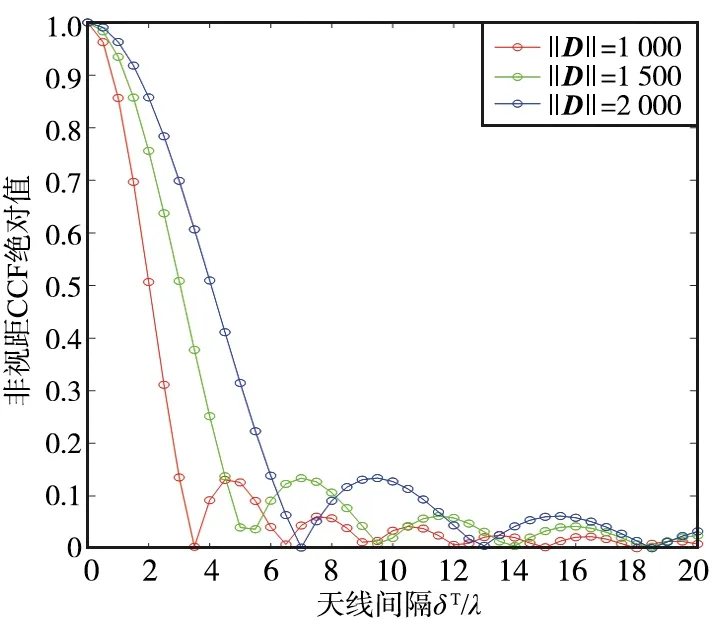
(b) 不同的無人機方位角下的CCF變化曲線
圖4顯示了不同的時刻下的ACF變化曲線,圖4(a)表示收發端勻速運動情況下ACF變化,可以看出,勻速情況不同時刻下ACF曲線幾乎重合,驗證了勻速情況下,ACF變化較為穩定,更接近平穩。圖4(b)表示收發端加速運動情況下ACF變化,可以看出,加速情況下ACF曲線變化較為明顯,進一步驗證了勻速與加速情況下,信道環境的非平穩特性較為明顯。

(a) 收發端勻速運動情況下無人機-車輛非平穩信道ACF 絕對值
圖5對比了無人機在不同方向移動時的DPSD。可以觀察到,當無人機向車輛移動時,存在某中心頻率,在該頻率處DPSD最陡,這說明該移動方向使散射體分布更加集中。進一步地,為保障地面用戶的接收功率高于某一閾值,最好將某一區域劃定為排斥范圍,且無人機要遠離該范圍。
圖6給出了ACF數值結果和無人機測量模型的ACF結果之間的擬合情況。從結果可以看出,數值結果與實測ACF結果擬合效果良好,進而驗證了所提模型的準確性和可行性。
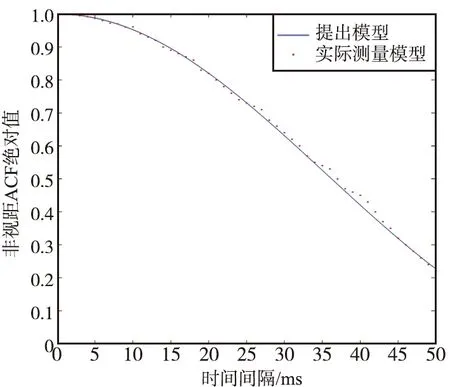
圖6 無人機-車輛非平穩信道在不同方向移動時的ACFFig.6 ACF when the UAV-Vehicle non-stationary channel moves in different directions
3 結束語
無人機輔助通信是6G通信的重要場景之一,學術界和工業界已驗證了使用無人機對網絡性能的提升。針對該場景,本文提出了新型非平穩信道模型,其中,無人機側和車輛側的散射體分別由同心圓柱體和半球體建模。同時,為更精準模擬真實無線傳播環境,本文考慮了非視距分量上的二次散射徑。基于所提模型,對其時間自相關函數、空間互相關函數和多普勒功率譜進行了數學推導,進一步分析了新模型信道特性。無人機信道模型在高速旋轉下的通信,目前建模較為復雜,這將是接下來的研究重點。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
