基于重載四旋翼無人機結構設計
2022-05-18 03:38:50李垚鄭鵬
起重運輸機械 2022年8期
李 垚 鄭 鵬
沈陽工業大學機械工程學院 沈陽 110870
0 引言
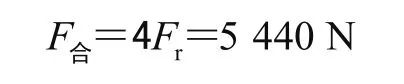
四旋翼無人機是一種通用性能多用途廣泛的航空航天飛行器,被廣泛應用于測繪、植保、消防等場合。目前,無人機市場上大多是電動無人機。電動無人機通過電機和電調進行驅動,通過電線連接旋翼傳動,但其承載能力和續航時間尚有欠缺,一些公司設計的小型油動無人機載重輕、續航能力不足。本文設計的油動無人機具有大載重、長時間續航的優勢,以發動機作為動力的主要來源,利用帶傳動的傳動系統將扭矩傳到2根支臂軸,支臂軸末端為90°布置的錐齒輪,錐齒輪上端連著旋翼,旋翼轉動帶動整機飛行工作,故傳動系統是油動重載四旋翼無人機的重要結構系統。為了能使油動無人機保證良好工作狀態以及壽命,必須保證傳動系統的傳動精度、零件強度和整個裝配體強度。本文設計的無人機以碳纖維為傳動軸外殼,鋁合金為主要支撐部件(見圖1),可帶動整個傳動系統工作。

圖1 油動重載四旋翼無人機整機
復合材料是一種高性能新型特定加工成型的材料,具有質量輕、強度高、可設計性等優點,復合的目的是要改善材料的性能,確保用復合材料制成的材料有特定的力學性能,如受扭矩載荷、拉力載荷、彎矩載荷等。復合材料按使用要求大致分為結構型復合材料和功能型復合材料,在航空領域,目前和今后幾十年的發展主流是用于制造航天飛行器結構件的碳纖維增強樹脂基復合材料,在此基礎上發展結構復合材料,以提高航天器的技術水平。
1 機架結構設計
1.1 設計方案
該方案的基本設計要求有:1)整機長4 300 mm,寬3 700 mm,高1 600 mm;2)動力源件為發動機;3)傳動軸為碳纖維材料減輕機身自重;4)為防止軸加工長度過長,將軸分為3段并用聯軸器連接。根據以上要求和飛行器飛行的基本原理,初定無人機傳動系統為工字形,如圖2所示。
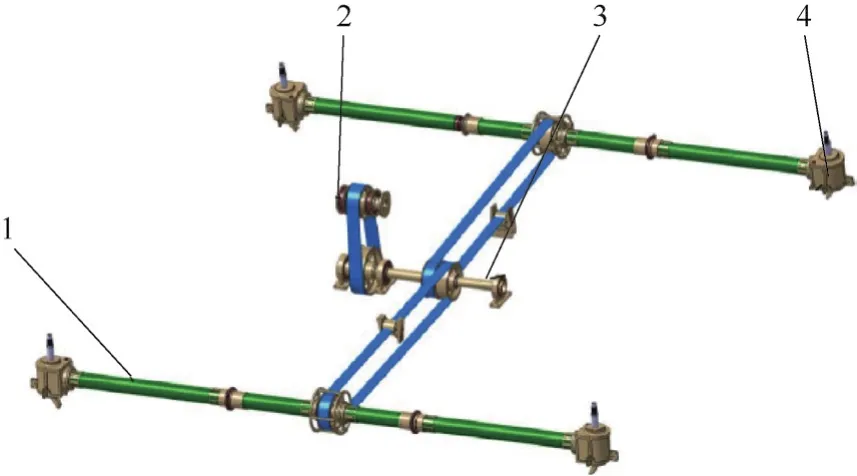
圖2 傳動系統布局
1.2 整機重要部件參數的選取
根據整機的布局、旋翼額定功率30 kW、額定轉速3 000 r/min,合理選取發動機功率、中間軸轉矩、齒輪箱轉矩等組成部分的材料參數,并計算最大升力,設計中的其他參數選取如表1所示。
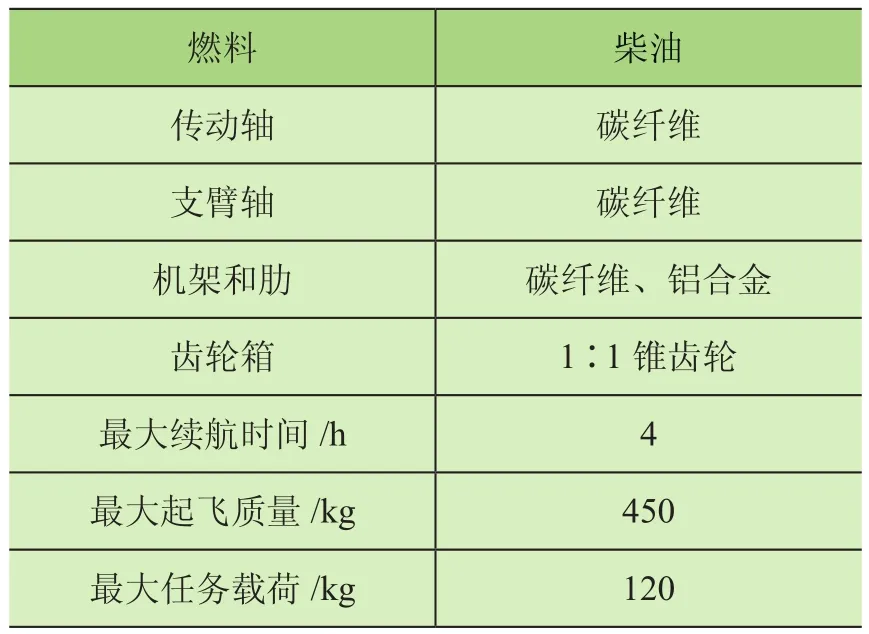
表1 無人機其他材料參數
1)發動機功率
考慮發動機在傳動過程中的摩擦損耗,分析給出發動機功率135 kW,轉速為3 000 r/min。
2)中間軸轉矩
發動機按照1:1.3的轉速比將輸出傳遞到中間軸,故中間軸轉矩為
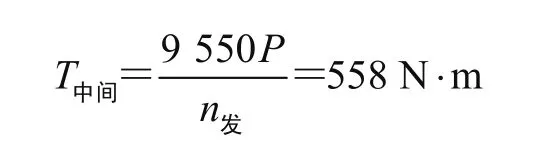
考慮中間軸為動力輸出中心,中間軸的安全系數取1.5,最后中間軸實際傳出的轉矩為837 N·m。
3)齒輪箱轉矩
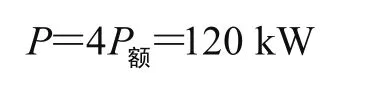
中間軸通過帶傳動將轉矩按1:1的比例傳遞到2個支臂軸,支臂軸再按照1:1的比例將轉矩傳到齒輪箱,故齒輪箱的轉矩為

4)旋翼總升力
齒輪箱內部為90°布置1:1傳動的錐齒輪,錐齒輪模數為5,齒數為16,故一個旋翼的升力為
其中,α= 20°,β= 45°。
整機所能提起的總升力為
1.3 機架的結構設計
為了保證2根支臂軸之間相對穩定,機架中間應設計為塔式形狀,用鋁合金肋板將各組成件相互連接,機架結構模型如圖3所示。將中間軸與支臂軸用鋁合金肋板連接成為一個整體,將支臂軸分為3段相同的軸端,并用聯軸器和軸套連接。
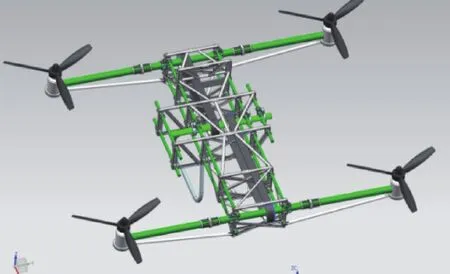
圖3 油動四旋翼無人機機架結構
2 機架結構的靜力學分析
2.1 機架結構的靜力學分析
將圖3所示通過ug建模后的裝配體進行文件轉換,導入Ansys Workbench有限元分析軟件中,根據工作實際情況對整機施加約束并進行靜力學分析,對每個旋翼施加豎直向上的升力,升力為1 400 N。將整機的中心位置進行固定,計算得到的圖4所示最大位移和應力云圖,整機最大位移量為0.004 7 mm,最大應力為3.94 MPa。
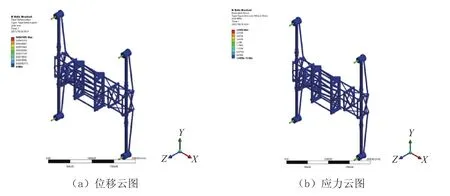
圖4 整機位移與應力云圖
2.2 機架結構的模態分析
對前述導入的無人機整機模型進行無約束的自由模態分析,提取圖5所示前4階非剛性模態振型云圖,并與整機部分組成件的無約束模態進行頻率對比。通過分析軟件計算的自由模態分析的前4階頻率(見表2),整機各組成件的固有工作頻率均在200 Hz以上,與整機固有工作頻率19.28 Hz相比相差較多。因此,此次設計的油動重在四旋翼無人機機架不存在整機和組成件之間的共振現象,同時強度剛度等均遠低于鋁合金材料的需用參數,本次機架結構設計符合實際要求。
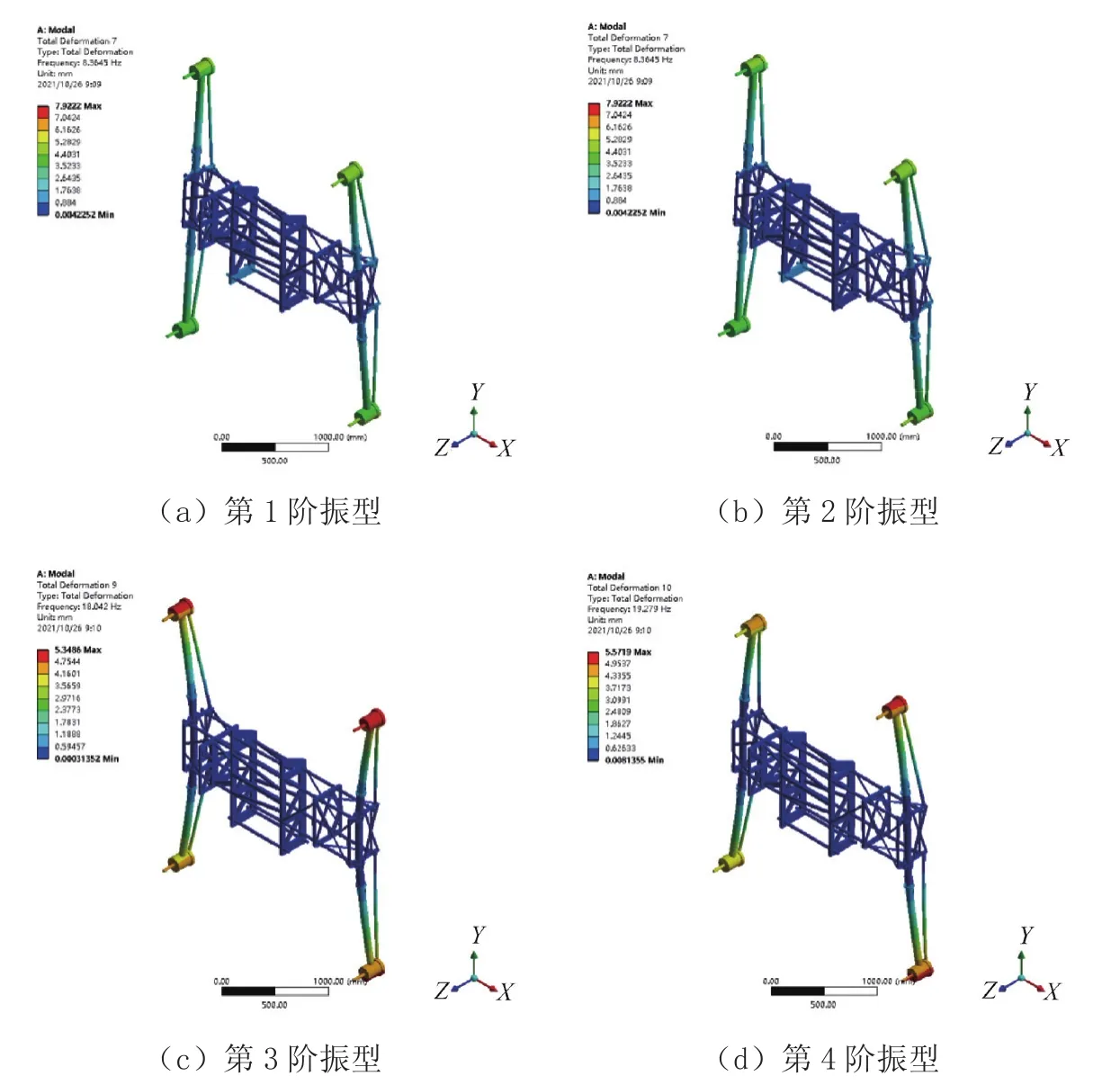
圖5 前4階非剛性模態振型云圖

表2 前4固有頻率
通過分析以上數據,整機結構的最大位移量較小,最大應力遠小于材料的許用應力,整機與組成件頻率差距過大,不會發生共振現象。機架1~4階振型顯示整機變形均發生在支臂軸與支臂軸連接的組成件處,主要原因為支臂軸長度過長出現變形。
3 結論
1)查詢相關設計手冊,計算整機最大的工作應力,合理選擇無人機重要組件材料參數,通過ug建模軟件對傳動系統部位進行機架設計。
2)靜力學分析結果顯示,無人機整機結構的最大位移較小,最大計算應力值遠遠小于零件的許用應力值,結構的力學性能滿足設計要求。 通過對機架結構無約束的自由模態分析結果表明:整機機架的最大固有工作頻率遠遠小于各組成件的固有工作頻率,能有效避免共振現象的發生,整機的各項動力性能指標均滿足設計要求。此次設計計算的研究結果給四旋翼無人機整機機架結構設計創出了一條新的思路,為實現重載油動四旋翼無人機運行使用提供了一個新的研究方向。
猜你喜歡
藝術啟蒙(2018年7期)2018-08-23 09:14:18
纖維復合材料(2018年3期)2018-04-25 07:22:58
電子測試(2017年11期)2017-12-15 08:57:13
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
應用化工(2014年10期)2014-08-16 13:11:29
計算物理(2014年2期)2014-03-11 17:01:39
無機化學學報(2014年4期)2014-02-28 17:31:11
