基于FMCW雷達的自適應生命信號提取方法
2022-05-23 06:38:56楊俊,黃俊,陶威
雷達科學與技術 2022年2期
關鍵詞:信號
楊 俊, 黃 俊, 陶 威
(1.重慶郵電大學通信與信息工程學院, 重慶 400065; 2.重慶郵電大學信號與信息處理重慶市重點實驗室, 重慶 400065)
0 引言
生物雷達可以實現非接觸式人體體征監測,在不影響人體正常活動的情況下獲取生命體征信息,可以應用于醫療監護、睡眠監測、駕駛員疲勞檢測等場景。常用雷達的發射信號形式有連續波(Continuous Wave,CW)雷達,超帶寬(Ultra Wideband,UWB)雷達以及FMCW雷達。CW雷達不需要很大的發射功率,但是不具備測距能力,UWB雷達可以探測較遠的目標,但發送信號需要很大的峰值功率。FMCW雷達系統具有探測目標距離遠、功率低、系統集成度高且成本低等優點。因此,本文采用FMCW毫米波雷達進行人體生命體征信號的采集和處理。
國內外的研究中,利用生物雷達進行人體生命信號的提取主要對靜止被測人員距離維處的生命信號進行帶通濾波后作快速傅里葉變換(Fast Fourier Transformation,FFT)得到呼吸、心跳的頻率,但該方法不能有效地處理局部非平穩信號。文獻[5]利用兩個FMCW雷達設置在被測人員前后位置同時檢測,對前后雷達采集到的生命信號相加處理,消除人體隨機移動的影響,對于特殊場景下該方法具有局限性。對于處理局部非平穩信號,經驗模態分解( Empirical Mode Decomposition,EMD) 是Huang 等人提出的一種自適應信號處理方法,將非平穩信號分解成若干個IMF分量,但EMD 分解后得到的IMF分量存在模態混疊以及端點效應問題。文獻[7]提出一種改進經驗模態分解方法提取生命信號,并對提取的呼吸、心跳頻帶信號進行分類、重構,進行兩次經驗模態分解,能夠有效地濾除雜波得到正常狀態下的呼吸和心跳頻率,但算法整體分解時間較長。
針對上述問題,本文在提高雷達距離分辨率的基礎上對被測人員的距離維檢測,消除人體抖動及環境噪聲的影響,引入IFCEEMD算法用于生命信號提取,保證算法處理的實時性并且提取的生命信號具有真實的物理意義,結合相關性分析和FFT進行處理,提取不同身體狀態下的呼吸和心跳信號。
1 FMCW雷達生命信號探測原理
FMCW雷達系統具有平均發射功率低、結構簡單等優點。發射信號通常為三角波或鋸齒波,圖1為本文選用鋸齒波作為發射波形用于人體生命信號提取的發射信號與接收信號的頻域圖。圖2為一幀數據中發射信號示意圖。
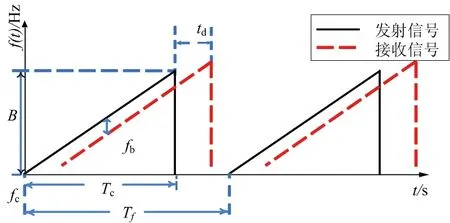
圖1 FMCW發射信號與接收信號
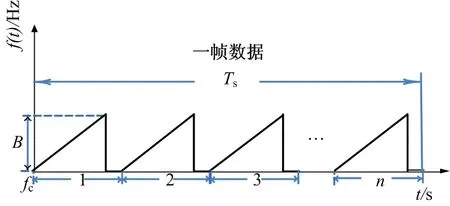
圖2 一幀發射信號數據
FMCW雷達發射波形信號可以表示為

(1)
式中,為發射信號幅值,為雷達發射信號起始頻率,為鋸齒波斜率,為發射信號初始相位。雷達發射信號照射到人體胸腔后反射的接收信號可以表示為
()=(-)
(2)
=2()
(3)
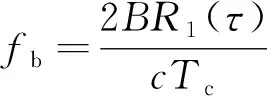
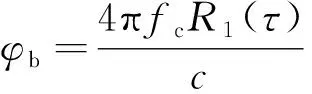
式(2)中為接收信號幅度,為物體在徑向距離處與距離相關的回波延時,式(3)中為光速,()包含著胸腔的位移信息,其中
()=+()
(4)
式中,為雷達天線到目標胸腔運動中心的距離。通過雷達接收信號與本振信號混頻得到中頻信號:


exp(j(2π+))
(5)
(6)
(7)
最終得到的中頻信號中具有關于人體胸腔位移相關的頻率以及相位。
2 自適應生命信號提取算法
2.1 距離維FFT
由于雷達對掃頻范圍的物體都進行檢測,通過對發射信號進行連續采樣,運用距離維FFT確定人體的位置,提取人體目標位置處中頻信號的相位信息進行處理,可以有效地濾除環境中其他距離處物體帶來的干擾信息。
以圖2中一幀持續時長作為慢時間軸的時間單元,將雷達接收信號距離FFT結果按照慢時間軸排列得到如圖3所示的距離維與慢時間軸關系圖。
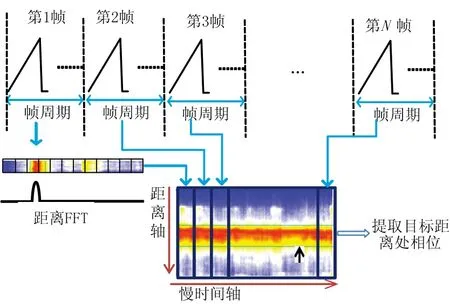
圖3 距離維與慢時間軸關系圖
選定固定的慢時間軸觀測窗口,對距離FFT結果統計判斷被測人員位置,提取目標距離位置處關于慢時間軸窗口的相位信息,作連續的相位差運算,消除相位漂移,得到含有呼吸和心跳的生命信號。
2.2 改進的FCEEMD算法
對距離維提取的生命信號()進行EMD分解得到若干個IMF分量,得到的IMF分量由高頻到低頻排列,可以濾除相應的高頻信號、雜波信號以及呼吸諧波。具體步驟如下:
1)求出()信號全部極大值和極小值,用三次樣條函數做出極大值和極小值對應的包絡線。計算出上、下包絡線的均值用()表示:
()=()-()
(8)
式(8)得到第一個IMF分量的第一次分解結果,重復上述篩選操作次后,如果任一時間點上的均值為0,即滿足第一個IMF分量的停止要求,得到首個IMF分量,記為()。
2)得到的()中包含了接收信號中的最高頻信號部分,將()從接收信號()中去除,得到()=()-(),將()作為原始信號重復上述步驟1)的操作得到第二個IMF分量()。通過如此反復操作次后得到:
()=()-()
(9)
?
()=-1()-()
(10)
3)在()成為單調函數時結束循環,可以得到個IMF分量,有

(11)
式中()為殘余分量,代表信號的平均趨勢。
由于EMD分解存在模態混疊以及端點效應問題,得到的IMF分量無法表達準確的物理意義。EMD的改進算法EEMD(Ensemble Empirical Mode Decomposition)在EMD的基礎上每次分解添加了隨機噪聲解決EMD分解后各IMF分量的模態混疊問題,但進行分解后還會有殘余噪聲,影響結果的精度且運算量大。
互補集合經驗模態分解(Complete Ensemble Empirical Mode Decomposition,CEEMD)在EMD基礎上向()分解時加入正負相反的兩對高斯白噪聲消除EEMD分解時加入的新的噪聲:
(12)
式中為()信號,為加入的白噪聲。將加入一對正負白噪聲后的信號,作為新的接收信號進行上述EMD分解,將每組分解的結果求均值得到最終的各IMF分量。本文在CEEMD算法基礎上,將IMF分量分解停止準則設置為將篩選操作次數固定為10次保證算法的實時性。
()在EMD分解時信號存在端點效應會造成提取的生命信號失真,為避免信號兩端無法確定處于極大值還是極小值,導致包絡線失真造成整個分解后的序列結果發散。本文在考慮算法復雜性與實時性上將線性延拓法引入IFCEEMD分解中,解決分解后帶來的端點效應,提高分解后信號的正交性。具體步驟如下:
選取離邊界最近的兩個極大值點、,將兩個極大值點連接并延長至邊界取交點與原邊界端點比較,如交點小于端點值,則選擇作為邊界處的極大值,否則選取作為邊界處的極大值點,如圖4(a)所示。
對于極小值點,如果交點大于端點值,則值作為極小值,否則選取交點作為極小值,如圖4(b)所示。

(a) 極大值點延拓
從IFCEEMD分解后得到的IMF分量由高頻到低頻排列,人體正常每分鐘呼吸次數在6~50次,取呼吸頻帶為0.1~0.83 Hz,心跳頻率在60~120次每分鐘,取心跳頻帶為1~2 Hz。對于呼吸次數緩慢或急促時通過能量閾值法會導致結果選取高于實際呼吸頻率的IMF分量,考慮算法提取呼吸和心跳信號自適應性,本文將濾波后的呼吸信號與FFT后頻率峰值在呼吸頻帶內的IMF分量利用相關性分析法提取出正確的生命信號結果。
3 實驗結果與分析
3.1 實驗環境參數
本文實驗使用天線中心頻率為60.5 GHz,最大頻率帶寬為6.8 GHz的FMCW雷達系統進行數據采集。數據采集環境為人體胸腔正面面對雷達系統0.5 m距離處,FMCW雷達采集參數如表1所示。
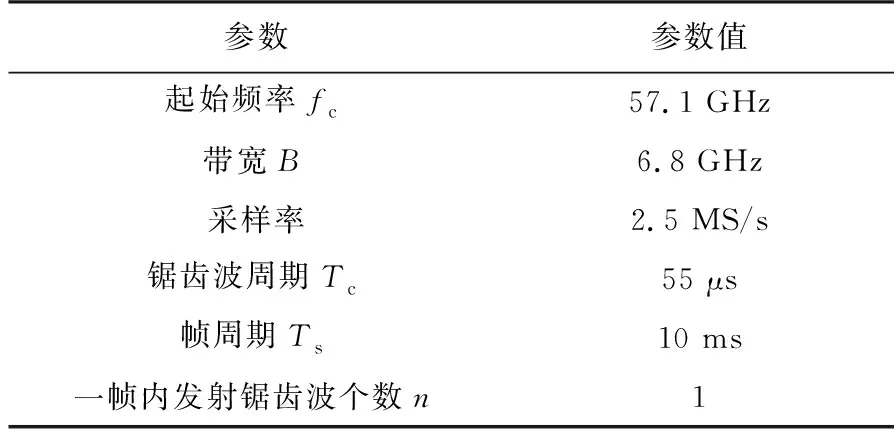
表1 FMCW雷達參數
對每個鋸齒波做128點的FFT運算得到頻率峰值,慢時間軸采用20.48 s的窗口觀測信息。
3.2 實驗結果
3.2.1 目標靜止測量結果
根據FMCW雷達參數可以得到距離分辨率為 2.36 cm,通過如圖5的靜止目標距離-慢時間軸關系圖可知被測目標在距離單元22即51.92 cm處。
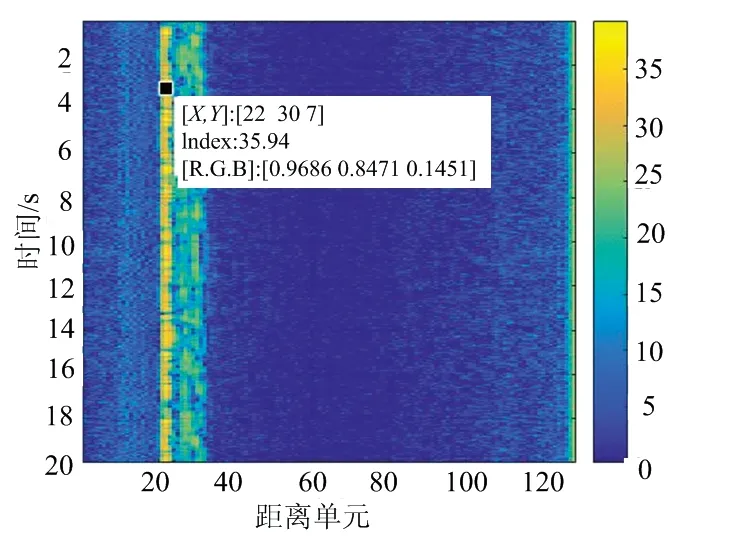
圖5 靜止目標距離維與慢時間軸關系
利用接觸式脈搏測量儀與小米手環測得心跳頻率為80次/分鐘(1.33 Hz),呼吸頻率為19次/分鐘(0.32 Hz)。圖6為雷達提取的靜止目標原始生命信號以及呼吸、心跳頻帶內的時域和頻譜圖。
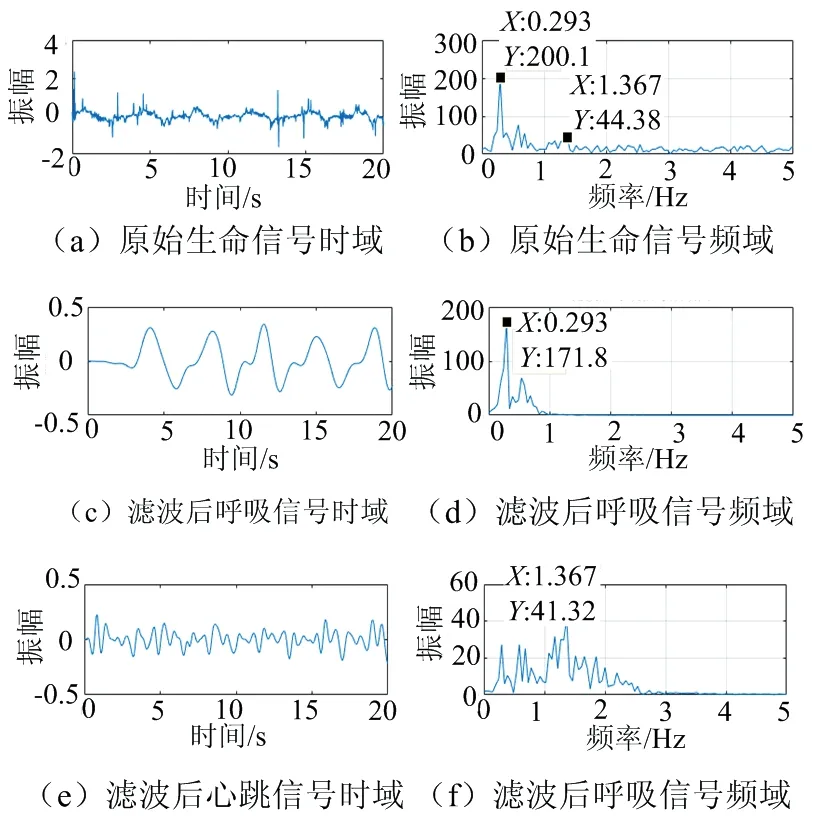
圖6 靜止目標生命信號時域與頻譜圖
為驗證算法的實時性與準確性,用EMD、CEEMD、IFCEEMD分別分解雷達提取的生命信號得到圖7(a)、(b)和圖8的時域分解結果。
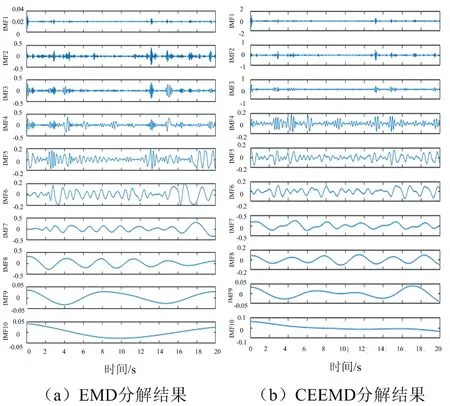
圖7 靜止目標EMD和CEEMD分解結果
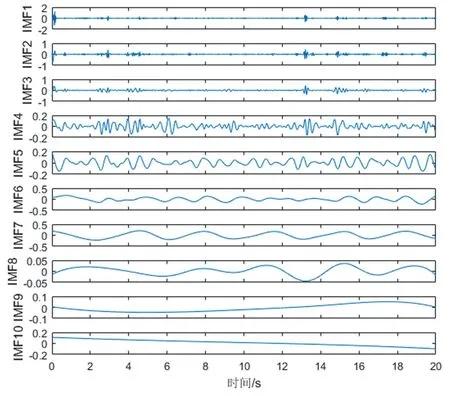
圖8 靜止目標生命信號IFCEEMD結果
IFCEEMD分解后第5~10個分量對應的頻域圖結果如圖9所示。
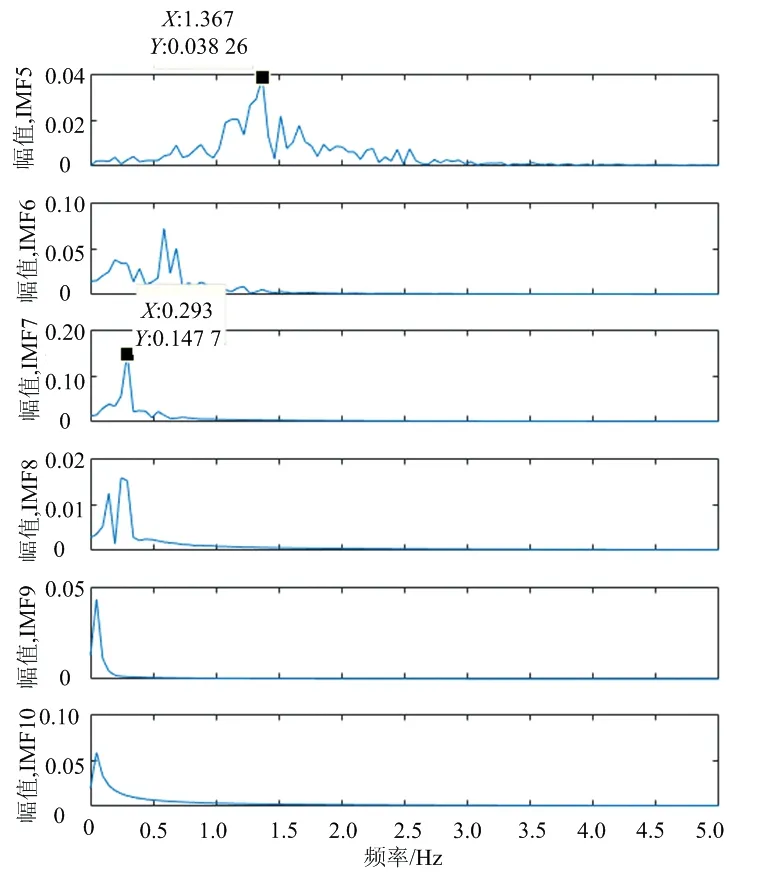
圖9 IFCEEMD結果頻譜
表2為EMD、CEEMD、IFCEEMD分解原始生命信號時的參數以及結果比較。
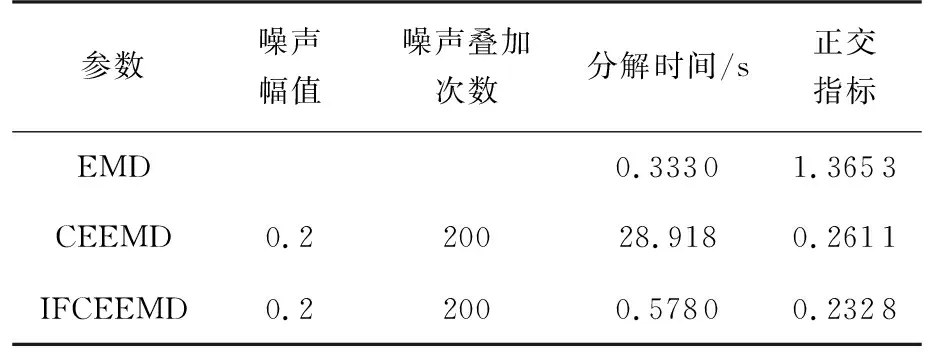
表2 EMD、CEEMD、IFCEEMD參數
由表2分析可知,IFCEEMD算法比原有的CEEMD算法大幅提高了處理速度,并且分解后的IMF分量正交性也優于CEEMD算法。
對IFCEEMD分解得到的IMF分量分別通過能量閾值法得到10個IMF分量分別在心跳和呼吸頻帶的能量占比以及本文提出的相關性系數法得到的呼吸信號系數結果如圖10所示。
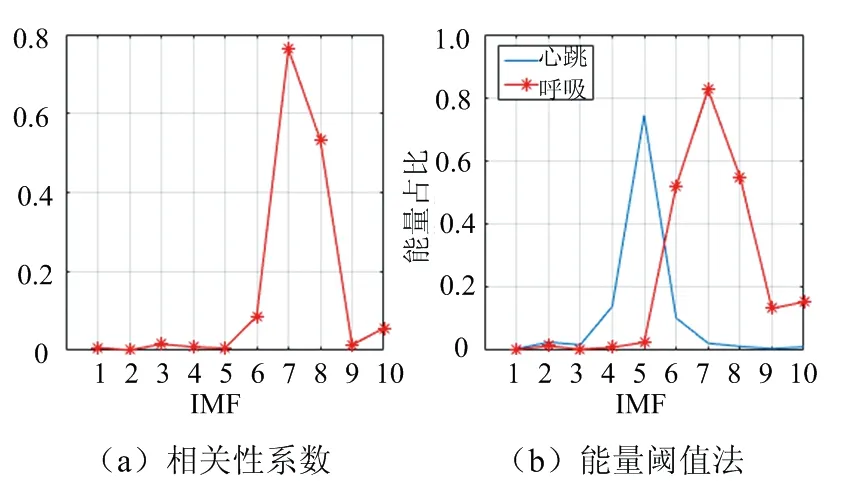
圖10 正常呼吸時相關性系數與能量閾值法結果
由圖9與圖10分析可知,第5個IMF分量和第7個IMF分量分別對應為分解后的心跳和呼吸信號,由圖9中IFCEEMD分解的頻譜圖可以得到心跳的頻率為82次/分鐘(1.367 Hz),呼吸的頻率為18次/分鐘(0.293 Hz),與實際預先測量結果一致。相關性系數結果以及能量閾值法對于正常狀態下的呼吸信號都可以準確地從IMF分量中提取出來。
3.2.2 不同呼吸狀態測量結果
運用能量閾值法選取呼吸信號時對于呼吸急促與緩慢狀態下不能準確地提取呼吸信號。為適應被測目標在不同呼吸狀態下,從IFCEEMD分解得到的IMF分量中選取與實際相符的呼吸信號,本文提出一種篩選方法將濾波后的呼吸心跳信號與FFT后頻率峰值在呼吸頻帶內的IMF分量利用相關性分析提取出正確的生命信號結果。
對于呼吸急促狀態下,預先測得呼吸頻率為36次/分鐘(0.6 Hz)。圖11為雷達提取的生命信號以及呼吸、心跳頻帶內的時域圖。
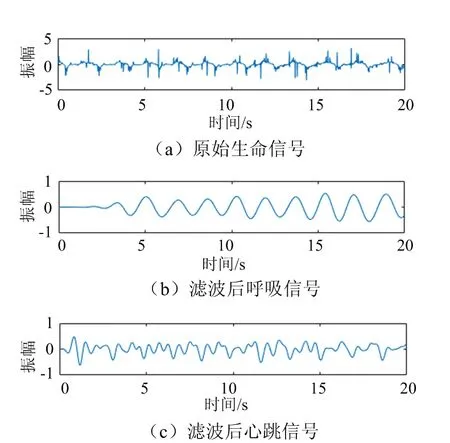
圖11 呼吸急促時生命信號時域圖
圖12為IFCEEMD分解后各分量時域圖,分解后第5~10個分量對應的頻域圖結果如圖13所示。
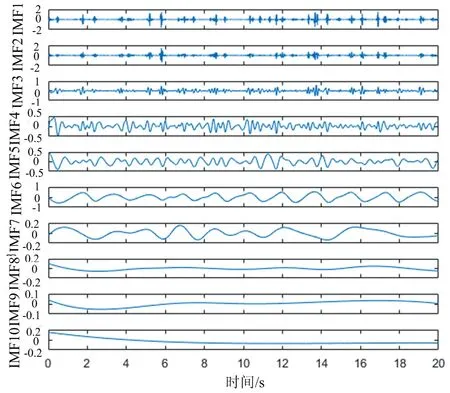
圖12 呼吸急促時生命信號IFCEEMD結果
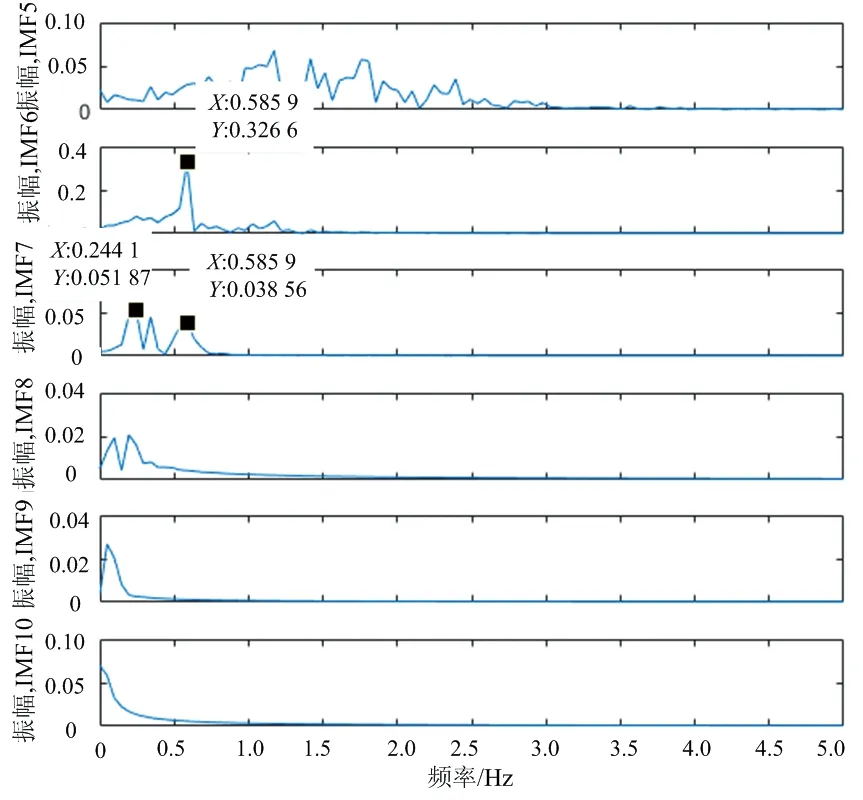
圖13 呼吸急促時生命信號IFCEEMD結果頻譜
圖14為對所有IMF分量通過能量閾值法得到對應呼吸和心跳頻帶的能量占比以及呼吸信號通過相關性分析法計算后的結果。
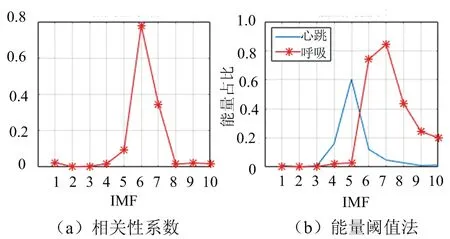
圖14 呼吸急促時相關性系數與能量閾值法結果
由圖13結果分析可知,IMF6與IMF7的頻譜峰值都處于呼吸頻帶內。由圖14可知,對于呼吸信號存在兩個能量占比大于0.7的分量,而IMF7還存在呼吸頻帶內的其他低頻信號能量占比更高,與實際結果相比較IMF6才是實際的呼吸信號,利用相關性分析后的結果能夠正確地選取呼吸信號。
對于呼吸緩慢狀態下,預先測得呼吸頻率為9次/分鐘(0.15 Hz)。圖15為相關性系數法與能量閾值法對各IMF分量計算后的結果。圖16為提取的生命信號經過IFCEEMD分解后第5~10個分量的頻譜圖。
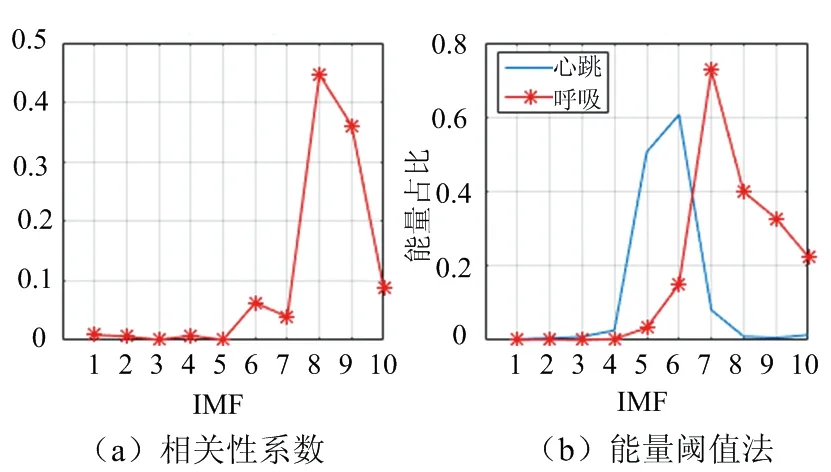
圖15 呼吸緩慢時相關性系數與能量閾值法結果
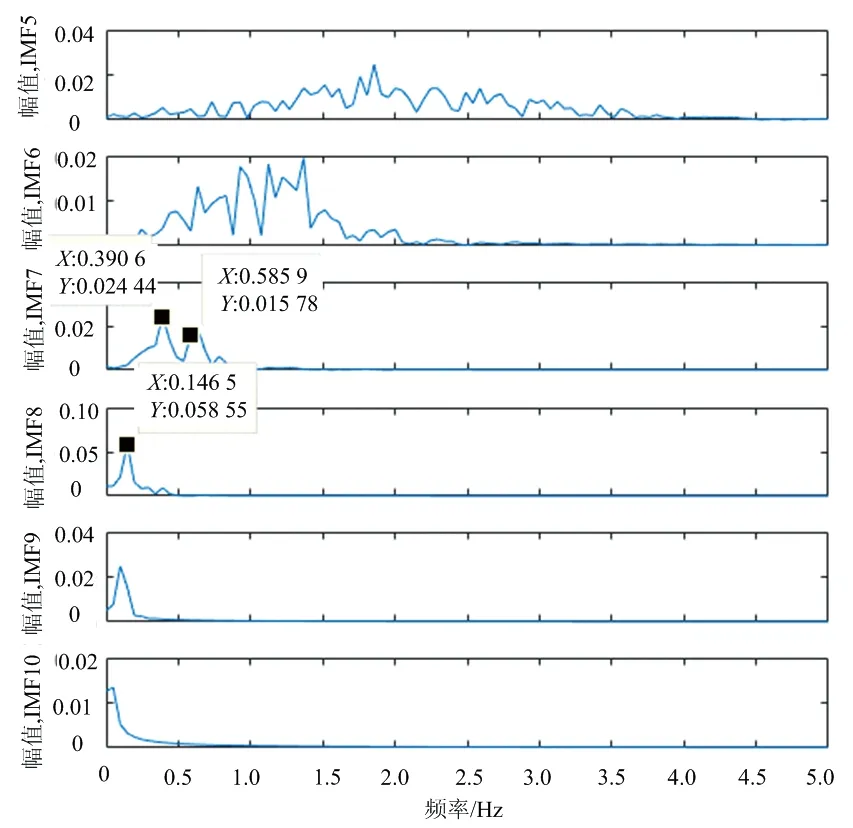
圖16 呼吸緩慢時生命信號IFCEEMD結果頻譜
對于呼吸緩慢狀態下,由于IMF7中含有呼吸頻帶內的頻率能量更高,能量閾值法計算后的結果為IMF7的呼吸頻帶能量占比更高,而實際的呼吸信號為IMF8,本文提出的方法對呼吸緩慢情況下同樣也能準確地提取呼吸信號。
3.2.3 目標身體抖動測量結果
目標身體抖動會造成目標在距離維的檢測結果波動,但人體抖動時胸腔部位還是基本保持在能量最集中的距離單元內。為適應被測目標的身體狀態,提高FMCW雷達系統的發射帶寬能夠實現更精確的距離分辨率,捕獲到實際人體胸腔距離處的原始生命信號。將FMCW雷達系統分別在4 GHz以及6.8 GHz下對于人體處于抖動狀態下的生命信號以及提取的結果進行分析。
將表1中的FMCW雷達參數中帶寬調整為4 GHz。在4 GHz帶寬下距離分辨率為3.92 cm,圖17為發射信號帶寬為4 GHz時距離-慢時間軸關系圖, 0~20 s內被測人員保持靜止,20~40 s內目標身體伴隨著隨機抖動,由于距離分辨率相比較6.8 GHz帶寬下降,被測目標在靜止狀態下距離集中在14個距離單元即54.88 cm處。隨機抖動環境下的距離信息集中在14~15個距離單元之間,導致提取的連續相位信息丟失。預先測得心跳頻率為80次/分鐘(1.33 Hz),呼吸頻率為24次/分鐘(0.4 Hz)。
提取圖17中20~40 s內目標隨機抖動狀態下主要距離維的生命信號,提取的生命信號以及呼吸心跳頻帶內的時域和頻譜圖如圖18所示。IFCEEMD分解生命信號后得到的IMF分量如圖19所示。根據圖18中FFT后的頻譜與圖19中IFCEEMD后的頻譜圖,結果均表明在4 GHz帶寬下由于身體抖動對呼吸心跳結果與實際存在較大誤差。
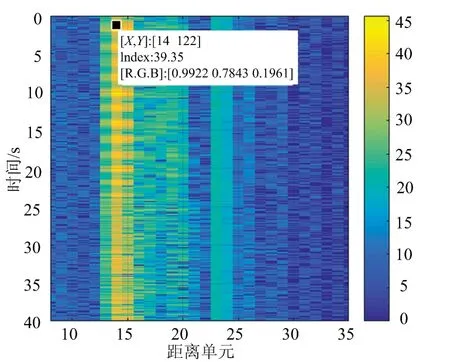
圖17 4 GHz帶寬距離-慢時間軸關系圖
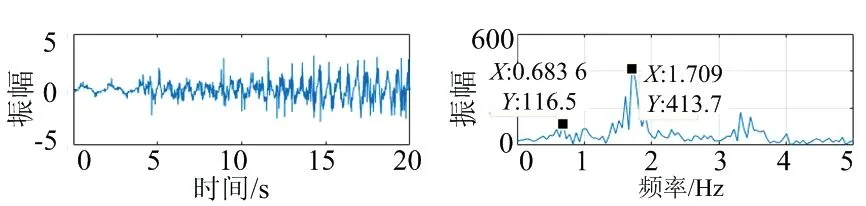
(a) 原始生命信號時域 (b) 原始生命信號頻域
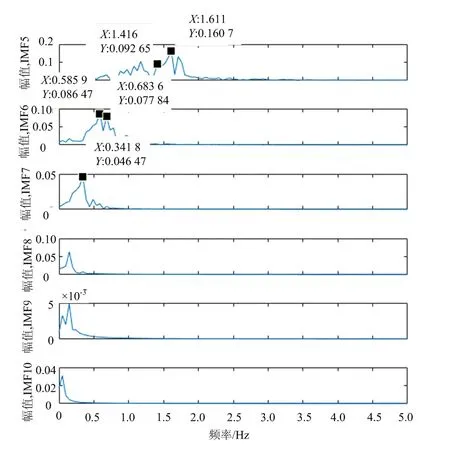
圖19 4 GHz帶寬下生命信號IFCEEMD結果頻譜
將FMCW雷達系統發射信號帶寬提高到6.8 GHz帶寬后,預先測得身體隨機抖動下人體心跳頻率為80次/分鐘(1.33 Hz),呼吸頻率為33次/分鐘(0.55 Hz)。提取被測目標20 s內呼吸時伴隨著身體抖動的生命信號,對應生命信號時域與頻域圖如圖20所示。IFCEEMD分解后第5~10個分量分頻譜圖如圖21所示,通過圖22中相關系數與能量閾值法的結果分析可知,相關性分析法能夠準確提取出IMF6為呼吸信號,得到呼吸頻率為0.585 9 Hz(35次/分鐘)與實際呼吸頻率相差2次/分鐘,得到心跳信號為1.416 Hz(85次/分鐘)與實際人體呼吸頻率80次/分鐘的結果相差在誤差范圍內。
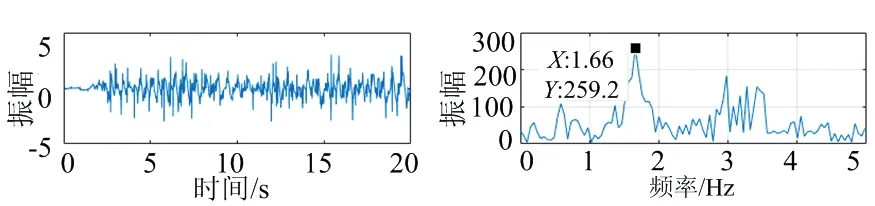
(a) 原始生命信號時域 (b) 原始生命信號頻域
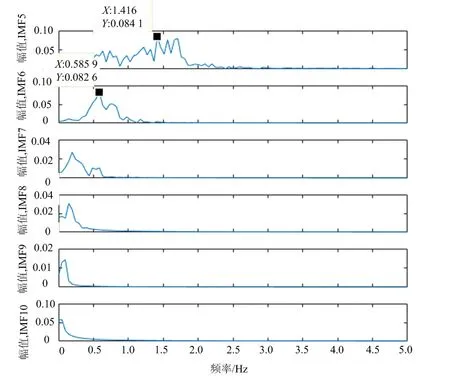
圖21 6.8 GHz帶寬下生命信號IFCEEMD結果頻譜
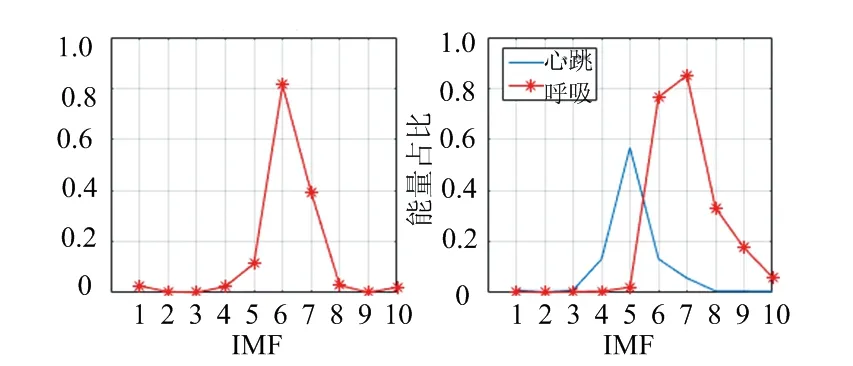
(a) 相關性系數 (b) 能量閾值法圖22 6.8 GHz帶寬身體抖動時相關性系數與能量閾值法結果
通過6.8 GHz與4 GHz帶寬下測量的比較,提高距離分辨率后能夠有效消除人體身體抖動對呼吸和心跳信號提取的影響,并且提高算法對于復雜環境下的適應性。
4 結束語
本文利用高帶寬的FMCW雷達系統提高雷達距離分辨率,對探測距離內的對象提取生命信號。實驗結果分析表明:IFCEEMD算法能夠在滿足計算實時性的基礎上具有較好的分解效果,并且提高距離分辨率后能夠有效消除身體抖動以及環境噪聲對生命信號的干擾,最后利用相關性篩選方法自適應地提取各種呼吸狀態下的生命信號提取,能夠適應更多復雜場景下的非接觸式人體生命體征監測。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
