一種空管雷達風電場干擾抑制方法
2022-05-23 06:39:04張衡,唐瑾,林強,焦艷
雷達科學與技術 2022年2期
張 衡, 唐 瑾, 林 強, 焦 艷
(1. 空軍預警學院, 湖北武漢 430019; 2. 四創電子股份有限公司, 安徽合肥 230088)
0 引言
近年來,隨著資源供給的日趨緊張,以及環境問題的日益突出,可再生環保資源逐漸引起了人們的重視。風能作為一種清潔無污染的可再生資源得到了廣泛的認可,風力發電是運用風能的一種重要方式,其對于調整能源結構,節約資源利用,保護生態環境,促進經濟的高效可持續發展具有重要的意義。
由于風力渦輪發電機(簡稱風輪機)龐大的尺寸、強散射特性以及風輪機葉片的微動(Micro-motion)特征,風電場會對雷達產生嚴重的影響。主要包括三個方面:1)風電場回波可能在信號中占主導地位而遮擋來自飛機的回波信號,導致“雷達盲區”;2)飛機航跡可能由于與來自風電場的回波的錯誤關聯而偏離其正確的路徑;3)風電場的回波可能導致在風電場附近產生高的虛警。
空管雷達是兩坐標雷達,由于沒有多個波束,風電場產生的回波和目標產生的回波具有同樣的特性,而且在幅度上更強一些,因此受風電場干擾更加嚴重。目前,大部分空管雷達抑制風電場干擾的方法是在風電場區域中進行距離方位門限調整或者航跡起始準則的調整。這些方法在抑制干擾的同時會顯著降低雷達性能,并有可能使得空管系統失效。因此,本文根據傳統空管雷達結構特點和技術發展現狀,提出采用高低波束并行處理方法,構建空管雷達抗風電場干擾系統總體框架,并設計了關鍵模塊的流程和處理方法。仿真結果表明,該方案有效可行。
1 空管雷達及風輪機回波模型
1.1 空管雷達
在實際空管雷達站的建設中,一般將一次雷達和二次雷達合裝架設,充分發揮兩種雷達探測目標的不同機理,這樣能夠進行優勢互補。合裝的空管雷達除了天線座及旋轉機構外,兩種雷達都是按照雙機熱備份設計,確保能夠全天候不間斷進行值班,其結構如圖1所示。其中,空管一次雷達的高低波束回波信號在接收機中進行合成,沒有進行獨立處理。

圖 1 空管雷達系統組成框圖
1.2 風輪機回波模型
一個完整的風輪機主要包括葉片、桅桿和引擎艙三個部分,而且每個部分的電磁波散射特征不同。桅桿和引擎艙相對雷達來說是靜止的,對電磁波有較強散射,表現為具有一定雷達截面積的靜止目標,與地物雜波一樣,可當作地物雜波使用動目標顯示濾波器進行處理;葉片則處于轉動的狀態,表現出運動目標的特征,且葉片不同部分的轉動線速度不同,故其雷達回波信號具有很寬的多普勒譜。
雷達與風輪機葉片位置關系如圖2所示。點為風輪機葉片的旋轉中心,點為旋轉葉片上的任一散射點,點為雷達所在位置,直線方向為雷達波束方向(Line of Sight,LOS),雷達與葉片旋轉中心的距離為。
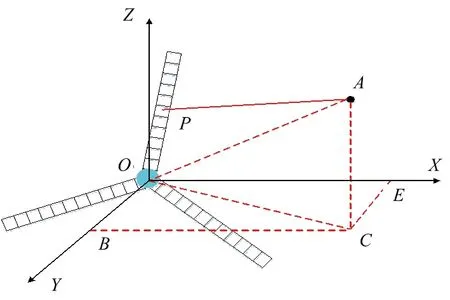
圖2 雷達與風輪機葉片位置關系
以散射點為例進行分析。雷達波束相對于風輪機的方位角為∠,記為;雷達波束相對于風輪機的俯仰角為∠,記為;雷達波束與葉片散射點的夾角為∠,記為();葉片散射點旋轉角為∠,記為()。根據空間直線夾角公式可得四者之間的關系為
cos()=sinsincos()+cossin()
(1)
點到葉片旋轉中心的距離記為,在遠場條件下()→0,因此可得點到雷達的距離為

-cos()
(2)
若發射信號為單載頻信號,其頻率和波長分別為和,光速為,則散射點在雷達處的回波信號為



(3)
對上式進行去載頻和去恒定相位項處理,可得散射點回波的基帶信號為

(4)
設葉片長度為,對上式進行積分可得整個葉片回波的基帶信號為
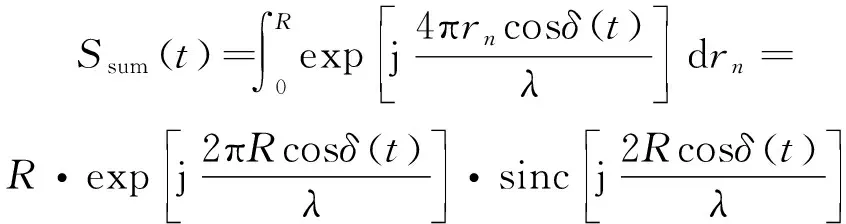
(5)
若一個風輪機包含個葉片,且第個葉片與雷達波束的夾角為(),可得所有葉片總回波的基帶信號為



(6)
由風輪機回波模型可以看出,影響風輪機雜波特征的參數主要有相對距離、葉片長度、葉片轉速、旋轉初相、俯仰角和方位角等,其中葉片轉速和旋轉初相的時變性較大,是影響風輪機雜波模型的主要參數。
通常風輪機成片存在,風電場的回波模型可以在上述模型的基礎上進行改進,需要在考慮多徑和遮蔽影響的前提下進行研究。
2 空管雷達風電場干擾抑制方法
風輪機的高度一般只有100 m左右,并且其回波特征相對固定,而空中目標的高度更高并且其回波特征與風電場的回波特征存在較大的差異。因此,本文在現有空管雷達結構基礎上,提出了一種風電場干擾抑制方法。該方法在一次雷達中使用兩個獨立的并行處理的低波束和高波束接收通道,并加入了高度估計和分類識別模塊,如圖3所示。

圖 3 空管雷達抗風電場干擾設計結構框圖
2.1 風電場干擾抑制流程
一次雷達收發模塊向空間發射雷達波束,并接收目標反射的高波束回波信號和低波束回波信號;二次雷達收發模塊向空中目標發送詢問信號,并接收目標發出的應答信號;低波束回波信號處理模塊對低波束回波信號進行檢測,確定目標的低波束檢測幅度和相位;高波束回波信號處理模塊對高波束回波信號進行檢測,確定目標高波束的振幅和相位;一次雷達數據處理模塊利用高低波束檢測到的振幅和相位計算目標的仰角,并利用目標的仰角計算目標的估計高度。
當確定被檢測到的目標是由于風電場引起的雜波時,一次雷達數據處理模塊向低波束和高波束信號處理提供雜波檢測反饋信號,表示檢測錯誤。低波束和高波束信號處理將進行第二次處理,把風電場雜波從回波信號中去除,并確定當前雷達回波信號中是否存在其他目標。
一次雷達數據處理模塊可以通過三種條件來判斷檢測是否是風電場雜波:①高低波束檢測到的目標的幅度是否高于到風電場雜波的幅度檢測門限;②估計的高度是否低于風電場雜波高度門限;③檢測目標的方位和距離與距離方位門限圖(存儲雷達周邊風電場位置)所示的風電場位置是否對應。
一次雷達數據處理模塊生成一次雷達探測信息(距離、方位、振幅、多普勒值和估計高度),與二次雷達的探測信息(距離、方位、振幅、多普勒值、高度和身份)進行融合,并進行點航跡處理。考慮到雜波剩余會引起錯誤的檢測,分類識別模塊根據多個掃描的檢測信息,通過綜合分析各階段處理數據和改進的數據關聯處理,還可以進一步提高飛機和風電場雜波的識別能力。
2.2 高度估計
對于不同目標,由于雷達反射截面積(RCS)、距離、仰角等差異,回波信號幅度不同,不能直接根據信號幅度大小確定目標仰角或高度。但高低波束通道接收到的同一目標回波信號的幅度差則只與圖4中的高低波束增益差有關。

圖4 高低波束俯仰面增益仿真圖
對圖4中的兩個增益曲線作差,可以得到回波幅度差,也就是比幅值和目標仰角的對應關系,如圖5所示。圖5通常稱之為比幅角敏函數曲線。對于空管一次雷達,得到高低波束回波比幅曲線后,再根據比幅角敏函數,就可以得到目標的仰角。
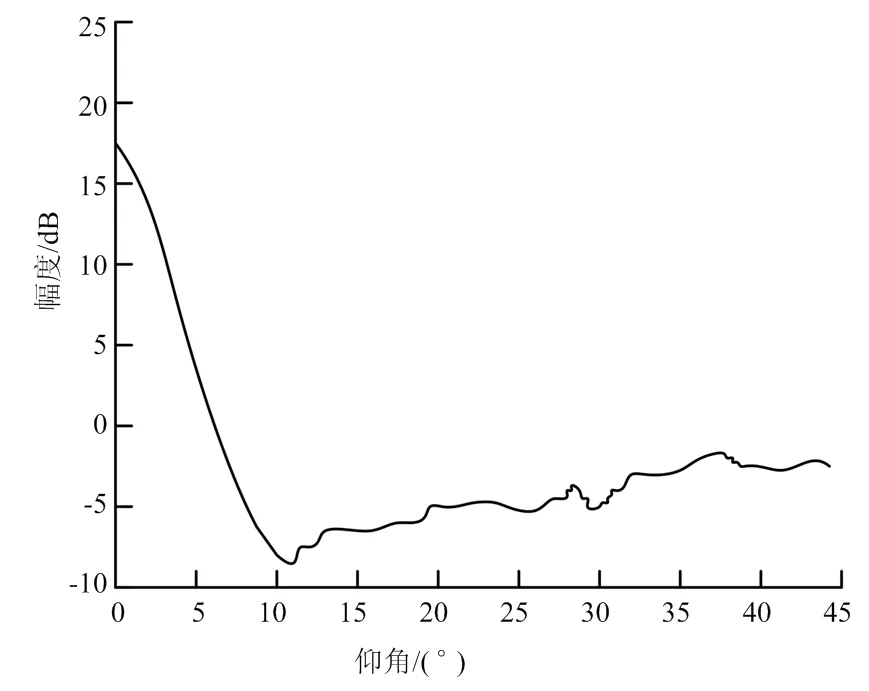
圖5 比幅角敏函數曲線仿真圖
類似比幅角敏函數,利用高低波束回波之間的相位差,也就是比相值和目標仰角之間的對應關系,還可以得到比相角敏函數曲線,如圖6所示。

圖6 比相角敏函數曲線仿真圖
比幅法和比相法測仰角均存在多值,即測仰角模糊問題。可以綜合利用比幅、比相角敏函數信息解模糊的方法得到目標的仰角。
測得目標仰角后,結合雷達獲得的目標距離信息,根據下式可以得到目標的高度。
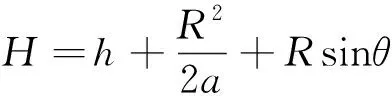
(7)
式中,為雷達天線架高,為等效地球半徑,取8 493 km,為目標距離,為目標仰角。
由于天線平臺水平誤差和天線波束指向誤差、非標準大氣折射誤差、陣地周邊環境等外界因素引起的誤差,以及機內噪聲接收通道幅相等雷達自身因素引起的誤差等因素會對測高精度產生影響,因此高度估計需要進行校準。高度估計校準以二次雷達的高度信息為基準,對一次雷達高度估計進行周期性地修正。
2.3 雜波的估計與抑制
2.3.1 雜波的估計
利用風電場回波的時頻特征,根據風輪機“時頻閃爍”與風輪機微動參數間的對應關系,借鑒圖像處理的相關知識,對風輪機的轉速和初相進行估計。
1) 轉速估計
目前主流的風輪機葉片數量均為3,每兩片葉片之間的夾角為120°。在風輪機葉片旋轉過程中,當雷達視線垂直照射葉片時的風輪機回波達到最強,出現一個峰值,如圖7所示。隨著葉片的轉動,峰值周期性地出現,且任意兩個相鄰的峰值對應的時間間隔相同,在該時間間隔內風輪機旋轉了60°,也即轉過了1/6轉。因此可根據峰值出現的時間間隔Δ,求得風輪機的轉速估計值(單位:r/s)為
(8)

圖7 葉片轉動與峰值時刻對應關系示意圖
通過尋峰函數找到峰值出現對應的時刻,便可以對風輪機的轉速進行估計。
2) 風輪機初始相位估計
基于時域波形圖的風輪機微動參數提取方法不僅可以提取葉片的旋轉頻率,同時還可以根據峰值出現的位置估計風輪機葉片的初始相位。假設初始時刻的葉片初始相位為,當回波出現第一個波峰時刻時,葉片轉過的角度為,如圖8所示。要判斷葉片的初始相位估計值,還需借助時頻域波形圖的閃爍時刻,若第一個波峰出現時的時頻閃爍值為正,此時的初始相位估計值為

(9)
若第一個波峰出現時的時頻閃爍值為負,此時的初始相位估計值為

(10)


圖8 峰值時刻與相位對應關系示意圖



(11)
2.3.2 雜波抑制
高低波束處理方法一致,下面以低波束處理過程為例進行說明,處理流程如圖9所示。

圖9 風電場雜波濾波流程圖
假設接收到的低波束信號為(),脈沖壓縮波的自相關函數為(),接收機噪聲為(),有個風輪機回波信號和個飛機目標。則接收到的信號可以表示為


(12)
式中:,,L分別為第個風輪機的回波信號的幅度、相位和時延;,,L分別為第個目標的回波信號的幅度、相位和時延。
根據雷達回波信號的時頻分析估計出風輪機的轉速和初相,得到風輪機雜波的幅值、相位和時延。則從接收數據中濾除雜波后的信號為
()=()-ej(-)
(13)
通過脈壓后旁瓣的變化判斷是否達到抑制目的。


(14)
如果式(14)成立,則令()=(),()=()+ej(-)。其中,是沒有進行脈沖壓縮的寬度,_是脈沖壓縮后寬度,是用來控制期望的副瓣壓縮量。如果式(14)不成立,則令()=(),()=(),再進行下一次迭代,找出下一個峰值。
如果所有風輪機雜波信號得到合理估計,系統從原始低波束回波數據中去除所有風輪機回波估計信號,再進行多普勒處理。
3 實驗及結果分析
實驗參數設置: 1)雷達參數 載頻為2.8 GHz,脈沖寬度為100 μs,脈沖重復頻率為1 000 Hz,多普勒濾波器組個數為8;2)風輪機參數 距離雷達50 km,包含3個葉片,長度均為40 m,葉片旋轉速度為15 r/min。葉片旋轉面與雷達視線的夾角為23°。目標距離雷達50 km,信噪比=15 dB。風輪機反射回波幅度服從瑞利分布,且與目標回波位于同一距離單元,雜噪比=35 dB。
圖10和圖11給出了采用本文所提風電場雜波濾除方法后的目標檢測性能曲線。為了便于比較,圖中也同時給出了采用傳統的多普勒濾波器組進行目標檢測的性能曲線。需要說明的是,圖中的結果是500次蒙特卡洛仿真結果的平均值,傳統處理方法是指傳統空管雷達不進行專門的風電場雜波濾除,由所有多普勒通道的檢測結果進行數據融合后得到的結果。從圖10可以看出,采用本文提出的風電場雜波估計與濾波方法后,雷達在風電場雜波背景中的目標檢測性能得到了顯著提升,尤其是在低虛警概率情況下,檢測性能提升可達50%以上。從圖11可以看出,當被檢測單元的SCR (信雜比) 逐漸降低時,僅采用傳統的多普勒濾波器進行檢測時,雷達的檢測性能下降嚴重,甚至導致無法檢測到目標。而本文所提方法幾乎不受信雜比的影響,始終保持了80%以上的檢測概率,表明了該方法的有效性和穩健性。
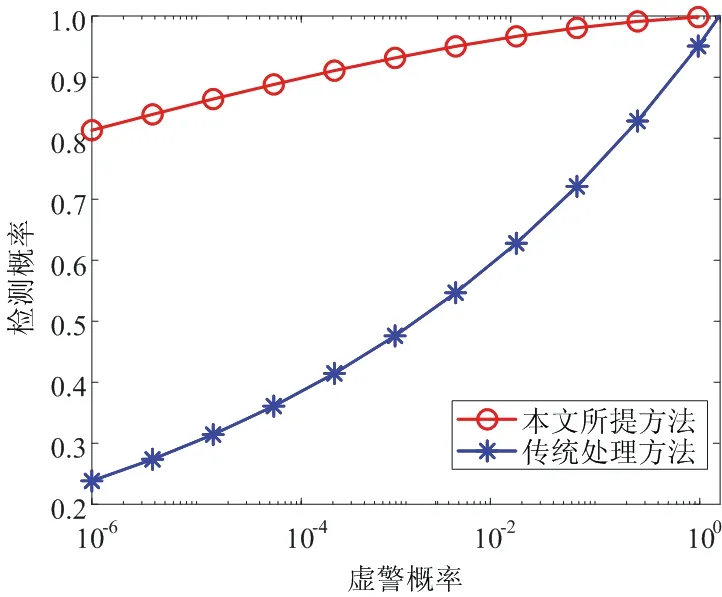
圖10 檢測性能曲線
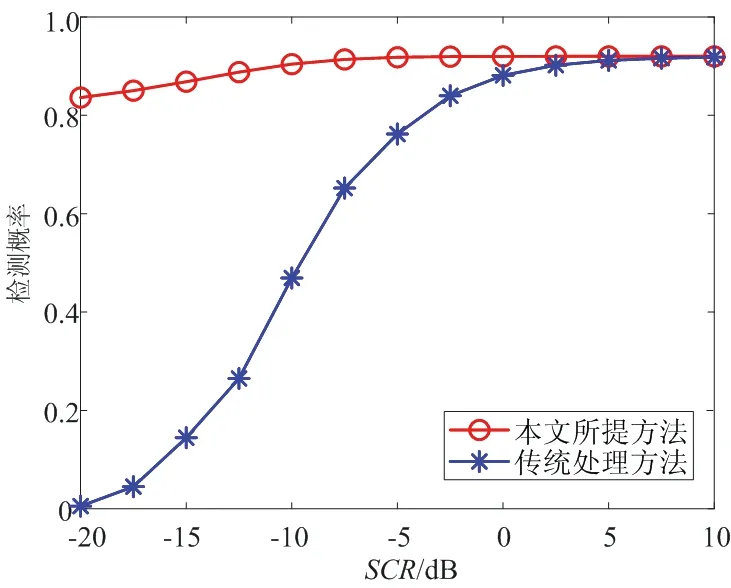
圖11 檢測概率隨平均SCR的變化曲線
4 結束語
本文分析了空管雷達受風電場干擾的原因,在建立風輪機回波模型的基礎上,根據現有空管雷達結構,充分利用風電場雜波與目標回波特征差異,建立了一種空管雷達抗風電場干擾方法,并從系統結構和流程、高度估計和雜波估計以及抑制的流程和方法等方面進行設計,提高了雷達抗風電場干擾的能力。實驗仿真結果驗證了方法的有效性,該研究對常規情報雷達設計也具有十分重要的參考價值。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
