基于單片機的智能小車系統
2022-05-27 08:26:50李建成陳先瑞
化工自動化及儀表 2022年3期
于 波 張 強 李建成 陳先瑞
(東北石油大學物理與電子工程學院)
隨著計算機和電子技術的迅猛發展,智能產品的研究與開發愈發受到各領域學者們的重視,其中,智能車技術的發展日新月異,在工業生產、國防軍工及民用生活等領域都發揮了重要作用[1]。 智能車以電子技術為背景,綜合了計算機、傳感器及機械等多學科技術,在眾多領域被廣泛應用,能夠替代人類在一些特定環境工作,例如美國的“勇氣”號和“機遇”號火星探測機器人為人類探索火星做出了貢獻,我國自主研發的“月球車”所應用的技術也處于世界前列;智能車也應用于自動貨運、無人駕駛等場合[2],并取得了相當不錯的成績。 智能車的應用正逐步滲入到工業和生活的各個層面,提高了生產效率并減少了人為失誤,提升了人們的生活品質[3]。
智能小車,即輪式機器人,集環境感知、動態決策與規劃、智能控制與執行等多種技術于一體[4],隨著技術的不斷成熟,一些前沿技術被應用于智能小車[5]。 筆者基于STM32F103 單片機,通過規劃智能小車的總體設計方案,進行硬件電路設計、 程序代碼編寫以及軟/硬件的綜合測試,實現了智能小車的自動循跡避障、 紅外遙控運動、上位機對智能小車的遠程控制及拍照存儲等功能,筆者所設計的智能小車可以在所處環境中通過傳感器自行判斷和分析,在無人操作的情況下自主完成任務。
1 智能小車系統整體設計
為使所設計的智能小車可以沿著黑色膠帶軌跡行駛, 以STM32F103 單片機作為主控芯片,配合電源模塊、L298N 電機驅動模塊、循跡模塊、自動避障模塊、WiFi 模塊和電路, 設計智能小車系統,其結構如圖1 所示。
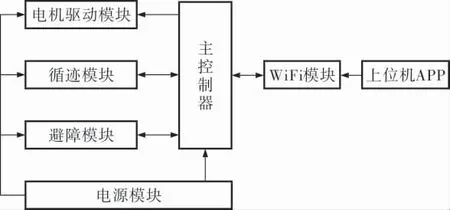
圖1 智能小車系統整體結構框圖
避障模塊自動檢測障礙物并自動調整運動軌跡,WiFi 模塊實現手機和電腦端對智能小車的無線操控。
智能小車前部設有2 個HJ-IR2 紅外避障模塊, 可以通過紅外線的發射和接收實現避障功能。 在智能小車的底盤安裝了3 路紅外循跡模塊,保證智能小車按照預設好的路線行駛。 設計上位機APP,用以操控智能小車系統的WiFi 模塊。
2 硬件電路設計
2.1 主控制器
智能小車系統的控制器選用的是STM32F103單片機,該芯片是意法半導體推出的一款32 位單片機,基于ARM Cortex-M 內核,具有實時性優異、外設豐富及價格低等特點[6]。STM32F103 單片機的內部結構如圖2 所示,可以看出,芯片內部可以劃分為內核和片上外設兩部分。
2.2 電源模塊
單片機采用線性穩壓芯片AMS1117-3.3V(圖3),其中電容起到濾波的作用,分別濾去高頻和低頻信號,C31、C6 為輸入電容,作用是防止斷電后出現電壓倒置,C32、C2 為輸出濾波電容,作用是抑制振蕩和穩壓輸出[7]。
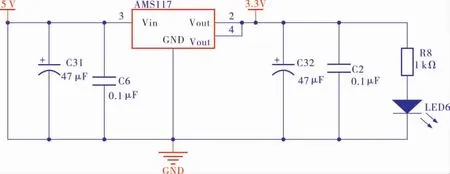
圖3 AMS1117-3.3V 穩壓模塊
2.3 電機驅動模塊
智能小車采用L298N 電機驅動模塊,L298N是一種高電壓、大電流電機驅動芯片,采用15 腳封裝,內含兩個H 橋的高電壓、大電流的全橋式驅動器,可以驅動直流電動機、步進電機及繼電器線圈等負載[8]。 使用直流兩用驅動器驅動兩臺直流電機M1 和M2。引腳A、B 用來輸入PWM 脈寬調制信號,對電機進行調速控制。 當輸入信號端IN1 接高電平,輸入端IN2 接低電平,則電機M1 正轉; 當輸入信號端IN3 接高電平, 輸入端IN4 接低電平,則電機M2 正轉,反之電機反轉。PWM 信號端A 控制M1 調速,PWM 信號端B 控制M2 調速。 控制電機驅動方向見表1。
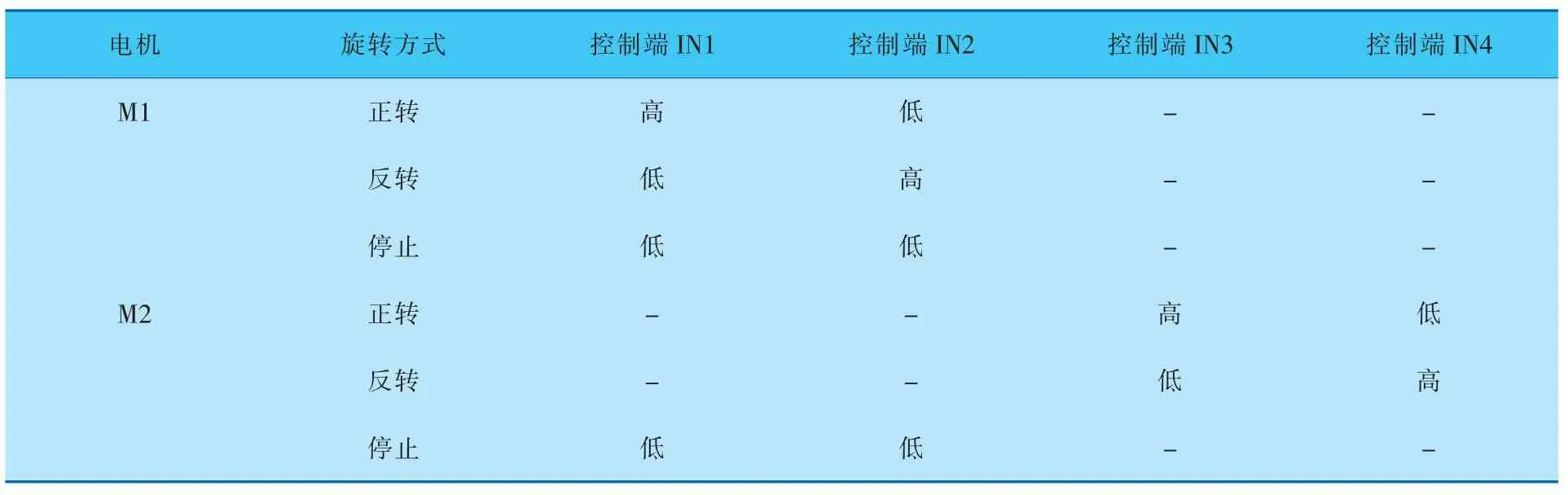
表1 控制電機驅動方向
2.4 3 路紅外循跡模塊
智能小車的避障功能采用3 路紅外循跡模塊,輸出3 路開關量,接單片機的普通IO 口,3 路紅外傳感器的電路如圖4 所示。

圖4 3 路紅外傳感器電路
3 路紅外傳感器的GND 接地,VCC 供電,X1、X2、X3 各自對應1 對紅外探頭。 紅外發射管發射光線到路面,遇到白底則被反射,接收管接收到反射光,經觸發器整形后輸出低電平,紅外探頭亮;遇到黑線時則被吸收,接收管接收不到反射光,經觸發器整形后輸出高電平,紅外探頭滅[9]。 3 路紅外循跡模塊能夠使智能小車沿著黑色線路行駛,并且不脫離黑色軌道。
2.5 紅外避障模塊
智能小車選用的避障模塊是紅外光電傳感器,該模塊對環境光線適應能力強,有1 對紅外線發射與接收管, 接通電源后紅色指示燈亮起,通過發射和接收紅外線判斷前方是否有障礙物。可以通過電位器旋鈕調節檢測距離(有效距離2~30 cm),工作電壓5 V,電流18~30 mA[10]。該傳感器的探測距離可通過電位器調節, 具有干擾小,便與安裝的優點。
2.6 紅外遙控模塊
如圖5 所示,紅外遙控模塊由發射和接收兩部分組成,應用編碼/解碼專用集成芯片進行操作控制,接收頻率為38 kHz。 紅外遙控器的主要作用是將遙控發射器發出的紅外光信號轉換成電信號,再進行放大、限幅、檢波和整形處理,形成遙控指令脈沖,輸出至遙控微處理器。 紅外遙控方式具有體積小、功耗低、功能強和成本低的優點。

圖5 紅外遙控模塊組成框圖
2.7 WiFi 模塊
WiFi 模塊可以搭載其他設備模塊,實現不同的控制和視頻傳送功能。 如圖6 所示,WiFi 模塊與STM32F103 單片機連接, 用于發送和接收數據。
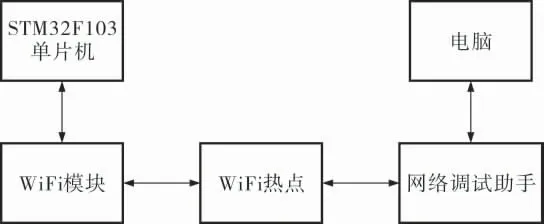
圖6 發送和接收數據模塊連接結構框圖
智能小車通過串口轉換軟件在上位機發送指令給單片機串口,經單片機串口控制IO 口的電平,驅動電機的轉動,再把USB 攝像頭的視頻進行編碼, 然后通過WiFi 模塊返回給上位機軟件,這樣就可以在控制軟件上看到圖像[11]。
2.8 SG90 舵機
SG90 舵機是一種位置伺服驅動器, 接收機或單片機發出信號給舵機,舵機內部有一個基準電路,產生周期20 ms、寬度1.5 ms 的基準信號,將獲得的直流偏置電壓與電位器的電壓比較,獲得電壓差輸出。 舵機的轉動角度是通過調節PWM 信號的占空比實現的,標準PWM 信號的周期固定為20 ms(50 Hz),控制方式是PWM 時序。舵機控制參數見表2。
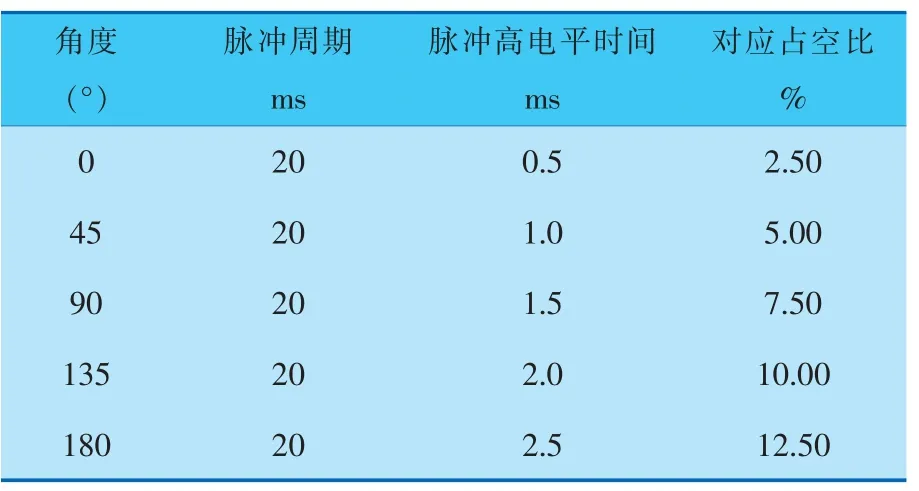
表2 180°舵機控制參數
2.9 智能小車硬件
按照相應的元器件結構以及組裝接線順序完成智能小車的組裝, 智能小車成品如圖7 所示。
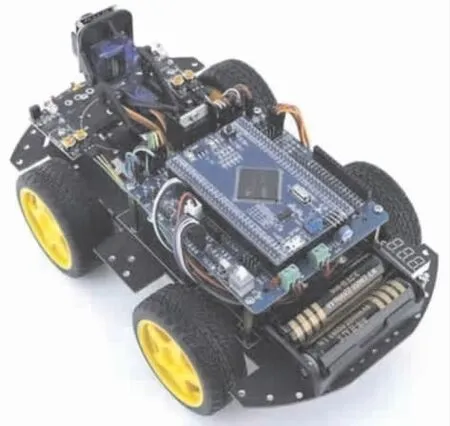
圖7 智能小車成品
3 系統軟件
硬件設計和安裝完畢之后,需要做的是程序的編寫和燒錄。 智能小車的程序代碼是采用C++語言編寫的, 采用Keil5 軟件生成智能小車需要執行的操作文件,通過ST-Link V2 調制下載器下載程序。 手機端設計HJduino-STM32 APP 對小車進行控制。
3.1 循跡功能設計
智能小車的循跡功能是通過小車前面的3路紅外循跡模塊實現的。 大多數紅外循跡方式是當左邊的紅外傳感器檢測到偏移黑線時小車往右偏,當右邊的紅外傳感器檢測到偏移黑線時小車往左偏,這種循跡方式無法保證精度,而采用AD 模式采集紅外接收管信號,精度較高。 筆者設計的智能小車循跡是根據單片機通過內部AD 采集循跡傳感器模擬量,然后通過調整PID 參數控制舵機角度來實現的[12]。
循跡模塊模擬圖如圖8 所示,左、右紅外傳感器的作用是判斷傳感器距離黑線邊界的距離,離黑線邊界越遠則AD 值越大, 中間紅外傳感器的作用是判斷傳感器是否在黑線內。 假設左右兩個紅外傳感器間的距離和軌道黑線的寬度同為4 cm, 則傳感器從左到右移動獲取的圖像如圖9所示。
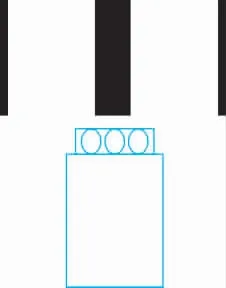
圖8 循跡模塊模擬圖
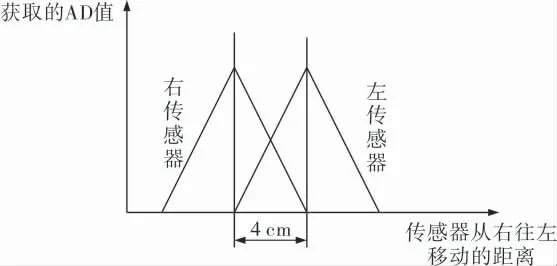
圖9 左、右傳感器向右移動獲取的圖像
將右傳感器的值減去左傳感器的值,所得結果如圖10 所示,可見,獲得的有限數據長度在4 cm 的黑線范圍內,當數據為零時表示小車循跡方向沒有偏差,當數據大于零時小車左偏,當數據小于零時往右偏,數值越大則小車偏移越大。
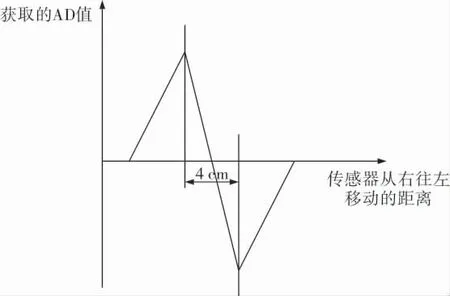
圖10 左、右傳感器相減所得的圖像
當智能小車的速度過快時,小車容易沖出黑線循跡范圍, 根據圖10 可知有效長度左邊和右邊有一段區域未被使用,可以將左右兩端未被使用的數據納入到有效數據之內。 通過中傳感器獲得左、右閾值點,圖像如圖11 所示,可見,當中傳感器小于閾值時,通過判斷左右傳感器的差值來處理左右兩邊的數據,數據反轉斜率為原來的兩倍,最終得到的數據處理結果如圖12 所示,寬度是原來的3 倍,這樣小車就不會偏離軌道。
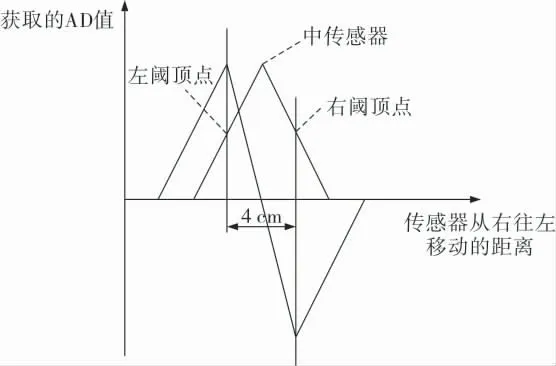
圖11 中傳感器獲得的左、右閾值點圖像
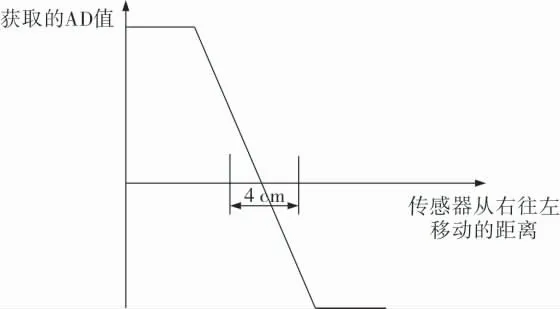
圖12 數據處理的最終圖像
3.2 WiFi 程序
WiFi 模塊是通過串口通信協議在智能小車與手機建立通信, 通過手機端發送遙控指令,物體通過鏡頭生成光學圖像投射到圖像傳感器上,光信號轉換成電信號,再經過A/D 后轉換成數字圖像信號,最后送到DSP 加工處理,由DSP將信號處理成特定格式的圖像傳輸到手機顯示屏[13]。
通過HJduino-STM32 APP 將手機連接上小車的WiFi,設置IP 地址控制端口,然后通過操控按鈕發送指令,智能小車接收到指令后進行相應的動作。 通過手機軟件可操控智能車。
在手機軟件上,通過云臺控制,調節舵機轉動角度,使攝像頭能夠捕捉周圍畫面,左邊按鈕能夠使小車完成前、后、左、右和有斜度的方向的行進, 右邊按鈕能夠通過舵機調節攝像頭角度。
電腦端同樣可以連接智能小車的WiFi 模塊,實現對智能小車的操控,進行拍照并以jpg 格式保存。
3.3 避障功能程序
智能小車的避障模塊選擇的是兩個紅外光電傳感器,當前方有障礙物時,紅外發射管發出的紅外信號經紅外接收管接收后,由集成芯片放大、比較后輸出一個低電平信號,點亮模塊上的LED 發光管。 智能小車的避障流程如圖13 所示。
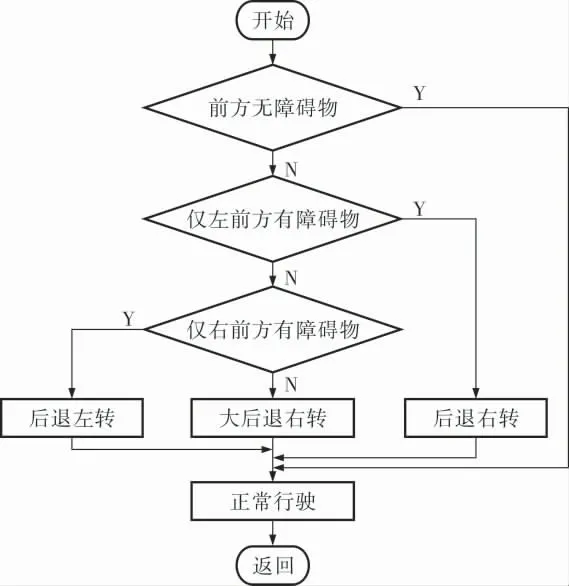
圖13 智能小車的避障流程
由圖13 可知,如果沒有檢測到任何物體,則小車直行;左邊探頭檢測到物體時,則小車后退500 ms、右轉500 ms;右邊探頭檢測到物體時,小車后退500 ms、左轉500 ms;左、右兩側都檢測到物體時,小車后退700 ms、右轉500 ms。避障程序源碼如圖14 所示。
4 結束語
智能小車以STM32F103 單片機作為主控核心, 對外設的驅動電機、WiFi 及傳感器等模塊進行控制,經過多次調試和測試驗證后,成功實現了自主循跡避障、手機軟件控制等功能,后期加以完善,即可投入市場,應用于勘探、消防、無人駕駛及環境探測等領域。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
表面工程與再制造(2019年6期)2019-08-24 06:40:04
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
電子制作(2018年12期)2018-08-01 00:48:04