RTK結合M9在某水庫地形測量中的應用
2022-05-30 08:10:58梁帥
廣西水利水電 2022年2期
梁 帥
(遼寧省丹東水文局,遼寧 丹東 118001)
實時動態測量RTK(Real Time Kinematic)是全球衛星導航定位技術與數據通信技術相結合的載波相位實時動態差分定位技術,能夠提供實時的測站點在指定坐標系中的三維定位結果。本文以某水庫工程為例,利用實時載波相位差分技術(RTK)采集水庫岸上部分坐標,利用M9 測深系統采集水庫水面平面坐標和實時水深,并經后期數據處理得到統一坐標系統下的三維坐標,之后利用成圖系統生成三維地形圖,為水庫地形測量提供新思路。
1 工程概況
某水庫由土壩、溢洪道、輸水洞3部分組成。壩長1 768.0 m,壩頂寬6.0 m,最大壩高9.4 m。水庫設計洪水標準為50 a 一遇,校核洪水標準為300 a 一遇,水庫校核洪水位22.85 m,總庫容1479 萬m3,設計洪水位22.38 m,最大下泄流量333 m3/s。水庫樞紐工程等別為Ⅲ等,永久性建筑物等級為3級,為多年調節水庫,高程基面采用假定基面。
2 地形測量
水庫地形測量包括岸上部分和水下部分,一般作業內容包括控制測量、測深點定位、測深、判別底質和繪制地形圖,測量時多采用斷面法或散點法。為了便于后期數據處理,在水庫水位平穩期進行測量,避免水庫放水對測量的影響。同時為了限制誤差的累積和傳播,保證水庫地形測圖的精度和速度,測量工作需按照“從整體到局部,先控制后碎部”的原則,先進行整個水庫的控制測量,之后進行碎部測量,控制測量其實質就是測量控制點的平面位置和高程,之后在利用測得的平面坐標和高程生成水庫三維地形圖。
2.1 岸上地形測量
岸上地形測量一般可采用GPS 儀器中電臺模式或CORS 模式進行測量,坐標系統一般采用CGCS2000。本文岸上地形測量采用GPS 中CORS模式進行測量。要求基準站和流動站衛星定位天線平面15°仰角以上無大片障礙物阻擋衛星信號,同時遠離無線電發射源及高壓線等;在衛星定位作業過程中,有效觀測衛星數不少于4顆,空間精度因子PDOP 值不大于5。首先利用藍牙將手簿和主機進行連接,接著新建工程,輸入工程測量名稱;然后,新建坐標系統,同時更改中央子午線,坐標系統選用CGCS2000,以便于后期數據處理和轉換;之后設置衛星高度截止角cut off并按照給定的賬號密碼將儀器接入CORS 站系統,利用CORS 模式進行測量;同時PDOP 精度因子設置成小于5,待儀器成固定解狀態開始進行測量。測量過程中需要掌握地形變化的轉折點,同時隨時查看衛星數量及解的狀態,保證在固定解狀態下采集數據,并對水庫中的關鍵點進行標記,比如固定點高程等,以便于后期高程的統一。同時,測量時需要對水庫水面線進行測量,并繪制草圖,標記水庫水面線關鍵點。測量結束后需要將測量的文件導出,主要內容有點號、東坐標、北坐標、高程、經度、緯度、解狀態、測量時間等數據,后期可根據需要選取數據。
2.2 水下地形測量
水下地形測量采用M9搭載實時載波相位差分技術(RTK)配置模式,該模式中主機PCM中增加了RTK相關模塊及擴頻無線電臺,需要在岸邊設立單獨的RTK 基站;該RTK 基站系統主要由RTK GPS接收器、外置的高增益GPS 天線、擴頻無線電臺調制解調器、外置高增益電臺天線和三腳架組成;在工作時岸邊的RTK基站和船上的ADP以10Hz的采樣頻率接收GPS 定位數據,同時RTK GPS 以1Hz 的采樣頻率從RTK 基站的擴頻無線電臺給安裝在船體上的主機PCM提供校正信號;RTK模式的定位精度能夠達到±3 cm,精度很高,能夠滿足測量要求。
本文水下地形測量采用機船搭載M9 進行測量。利用M9 進行水下地形測量時,首先需要連接好儀器,在岸邊架設RTK 基站,基站架設應選在地基牢固、地勢相對較高且便于安置儀器的地方,周圍無高度角超過15°的障礙物,無強烈干擾接收衛星信號或反射衛星信號的物體。測量開始前檢查M9 各儀器的狀態;之后設置M9 相關參數,如磁偏角、換能器入水深、鹽度、篩選距離、水深參考和坐標系統等參數,RTK 鎖定一般需要10 min 左右,需要等主機PCM 中GPS 信號指示燈變綠后才能進行測量;其次在正式測量前需要對儀器進行羅盤校正和系統測試,待儀器一切正常后才能開始操作。正式開始以后,需要在劃定的水面范圍內進行測量,同時機船駕駛應當平穩,在走航起步時應緩慢,測量過程中應盡量勻速前進,船速不宜過大;在走航結束時應緩慢減速,整個測量過程中要避免急速轉彎、急停等操作。儀器走航的密度取決于水庫水下地形的復雜程度,在水庫重點地形區域,走航密度可以加大。由于水庫水面面積相對較大,測量時可根據實際需要標定測量線,按照規定的測線進行測量,以避免遺漏區域。由于M9 測量時采集數據速率很快,可以達到每秒1 組數據,結合船速的控制,可以做到每幾十厘米就有一組數據,精度較高。測量結束后使用RiverSurveyorLive 數據處理軟件從記錄器中下載完整的.riv格式文件,計算機中保存的.rivr 文件數據是不完整的,進行數據處理,導出ASCII 數據,之后對導出的數據進行處理。導出的數據坐標為經緯度格式,需要使用坐標轉換軟件或Arcgis 對坐標進行批量處理,以滿足后期數據處理的要求。
3 數據處理和圖形繪制
將GPS 和M9 測量的數據導出后進行整理,首先根據岸上部分水庫水面線的數據計算水庫靜水狀態下的水面高程,并用次高程依次減去M9 換能器入水深和M9所測的垂直波束水深,進而得到M9所測數據水下地形中各點的高程,結合M9 所測得經緯度數據,初步得到了水庫水下部分的三維坐標高程。GPS 導出數據中的東坐標、北坐標分別為2000 坐標系統下的Y坐標和X坐標,因此需要通過Arcgis 系統軟件將M9 中三維坐標系統的經緯度轉換成Y坐標和X坐標,以統一整個水庫的坐標系統,便于后期成圖系統生成水系等高線和三維地形圖。
數字地面模型(DTM),指在一定區域范圍內規則格網點或三角網點的平面坐標(X,Y)和其地物性質的數據集合,如果此地物性質是該點的高程Z,則此數字地面模型又稱為數字高程模型(DEM)。在地形圖中,等高線是表示地貌起伏的一種重要手段,在繪制等高線之前,必須先將野外測的高程點建立數字地面模型(DTM),然后在數字地面模型上生成等高線,生成等高線以后可以進一步繪制水庫地形圖。首先將處理好的數據文件按照點名、空格、東坐標、北坐標、高程的順序制成.dat文件,按照成圖軟件的要求定顯示區,展高程點,建立DTM 文件,之后按照要求選擇合適的高程系數繪制三維模型。水庫三維地形圖見圖1。
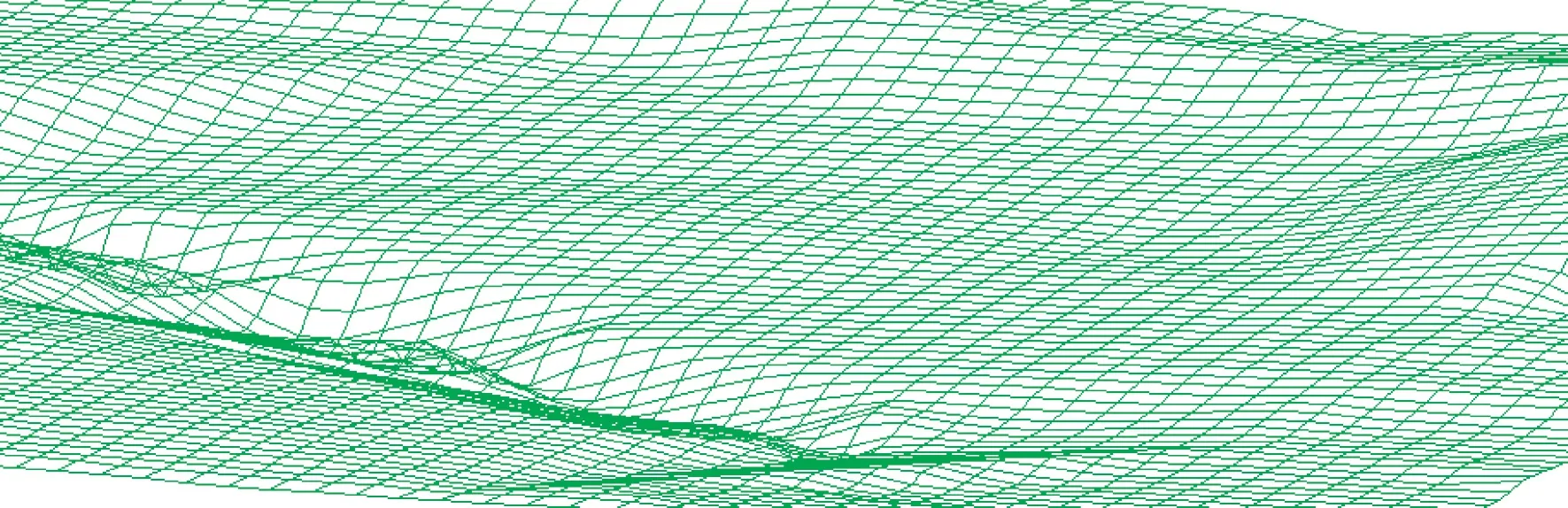
圖1 三維地形圖
通過水庫三維地形圖可以比較直觀的看出水庫的地形變化,了解水庫岸上和水下部分的變化趨勢,水庫是否淤積及淤積地點等,并可以根據測量數據繪制水庫庫容曲線,進行水庫各類參數的計算等工作。
4 結語
利用高精度的實時載波相位差分技術結合M9進行水庫地形測量具有可行性,測量數據連續性好,實時性好、定位精度高,對于地形變化的節點控制性好,保證了地形測量的完整性和準確性。基于CGCS2000坐標系統下的RTK技術進行岸上部分測量,采用RTK 配置模式下的M9 對于水庫三維坐標的采集具有突出優勢,后期二者測量數據結合坐標換算并經特定軟件處理,生成的水庫三維地形圖能夠直觀地顯示出水庫地形的變化情況,與傳統地形測驗相比省時、省力,減少了測量人員的工作量,提高了地形測量的效率。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
心理學報(2022年4期)2022-04-12 07:38:02
水泵技術(2021年3期)2021-08-14 02:09:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21