BCU制動控制系統在重載鐵路萬噸無線重聯機車上的應用及故障分析
2022-05-30 08:13:56鐘永飛
智能建筑與工程機械 2022年8期
鐘永飛
摘 要:從BCU制動控制系統的構成、特點、工作原理、主要功能等方面出發,研究電力機車在原有DK-L制動機的基礎上進行適應性改造,實現重載鐵路萬噸組合列車開行,并對BCU制動控制系統常見故障的處理方法進行分析,總結系統故障處理思路及經驗。
關鍵詞:萬噸組合列車;電力機車;BCU制動系統;故障分析
中圖分類號:U270.35文獻標識碼:A文章編號:2096-6903(2022)08-0126-03
0 引言
神朔鐵路是國家I級電氣化重載鐵路,其中部分萬噸組合列車由四臺韶山4型電力機車通過無線傳輸的重連方式,由主控機車發出指令同步控制三臺重聯機車(簡稱從車)實施列車牽引、制動功能。而原有的韶山4型電力機車DK-L制動系統相關閥件充、排風效率過低,缺少在線故障檢測診斷功能,如果延續傳統的多機重聯加掛貨物列車的編組方式,在制動工況下導致列車的空走時間長,制動距離超過鐵路技規所要求的800 m,無法實現快速制動控制。同時,一旦發生制動系統故障后,司機不能迅速有效作出應急處置,難以適應重載鐵路的戰略發展要求[1]。為此須針對韶山4型電力機車制動系統升級為可無線控制的同步制動系統,即BCU,將列車的制動力分布在各個機車上,提高制動波的傳遞速度,實現機車的同步制動功能,滿足列車安全運行的要求[2]。
1 機車改造的空氣制動系統組成及特點
1.1 新增部件
BCU制動系統的改造新增部件有單獨制動控制器、單緩電控閥、單制電控閥、制動控制單元BCU、均衡風缸EP控制單元(高速電控開關閥兩個,保護電控閥及均衡風缸壓力傳感器)、壓力傳感器(總風,制動缸,列車管)、重聯閥狀態壓力開關及列車管流量監控器等[3]。
1.1.1單獨制動控制器
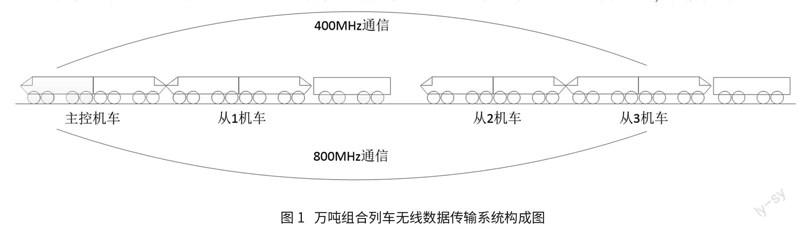
為實現主控機車與從車單獨的制動協調控制,改造空氣制動閥為單獨制動控制器,并在原作用管上加裝單緩電空閥及單制電空閥各一個。單獨制動控制器發出的信號為電信號,通過BCU的網絡與機車無線同步操縱控制系統的通訊,將主控機車的控制信號無線傳送給從車,實現統一同步的機車單獨制動及緩解控制[2],由4臺機車牽引以2+2方式的一列萬噸組合列車無線數據傳輸系統構成如圖1。
1.1.2制動控制單元BCU
制動控制單元BCU替代現有的制動邏輯控制單元DK-L,新的控制單元具有模擬與邏輯控制、制動機監控與故障診斷、網絡通訊等功能,負責控制機車電空制動機的各類電控閥,以及與從車無線同步操縱控制系統的通訊。
1.1.3均衡風缸EP控制單元
均衡風缸EP控制單元,由高速電控開關閥(緩解和制動)、均衡風缸壓力傳感器和保護電控閥組成,實現均衡風缸壓力的閉環控制。從而取代原有DK-L的緩解和制動電空閥,其控制精度可以到達±5 kPa。
1.1.4壓力傳感器及流量監控傳感器
壓力傳感器及流量監控傳感器,用于檢測總風管、列車管、均衡風缸、制動缸的壓力及流量。同時信息由BCU采集,用于制動系統狀態檢測及故障的診斷處理,通過CAN或MVB總線網絡傳輸,在顯示屏上顯示,由司機實時監測機車制動機的工作狀態。
1.1.5重聯閥狀態壓力開關
重聯閥改造是通過重聯閥狀態壓力開關電信號傳輸至BCU進行所處位置的判斷,全面監視機車尤其是遠端從車的重聯轉換閥位置信息,防止重聯閥轉換錯誤帶來的安全隱患。
1.2 BCU制動控制系統的特點
該系統通過對空氣制動系統閥件狀態監視,利用故障診斷系統進行在線故障診斷,提高司機應急處置效率,實現列車管快速充排風達到萬噸組合列車快速制動、緩解要求,同時通過400k、800M等無線通信[1],實現主控機車與從控機車電控聯合制動、斷鉤保護、充排風流量監測、列車速度控制配合、制動重聯等功能同步控制的要求,提高了萬噸組合列車制動的可靠性,確保列車安全運行的要求。同時BCU在控制上采用了失電常用制動模式,即一旦電氣線路與微機故障而失電,自動轉向常用制動。對制動機均衡風缸以及制動缸的壓力控制,均采用已在鐵路應用成熟的技術措施作為冗余或后備方式。
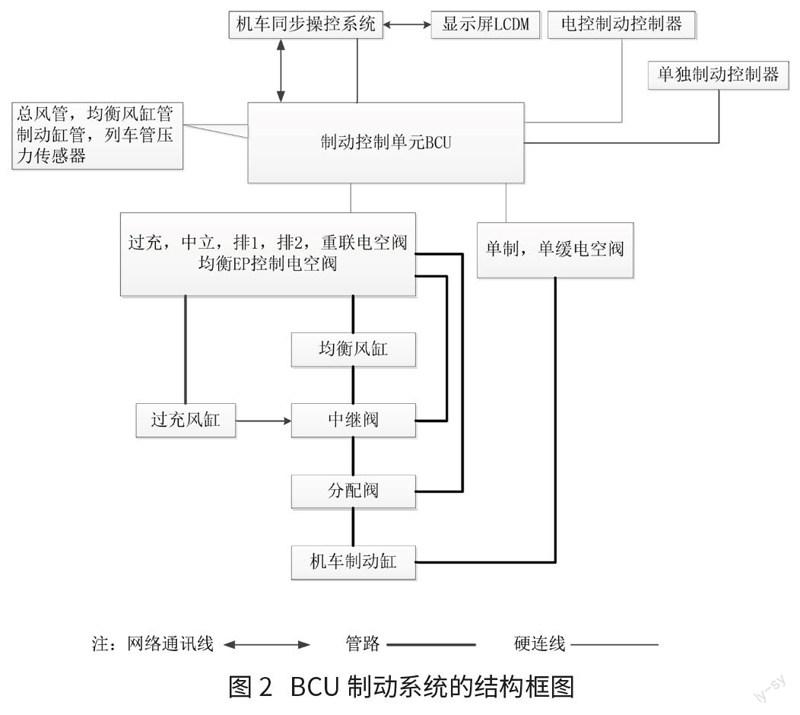
2BCU制動控制系統的結構框圖
BCU制動系統的結構如圖2。
3 系統原理及功能說明
制動控制單元BCU替代原有的制動邏輯控制單元DK-L,新的控制單元具有模擬與邏輯控制、制動機監控與故障診斷、網絡通訊等功能,負責控制DK-L型機車電空制動機的其他電控閥,以及與機車無線同步操縱控制系統的通訊。
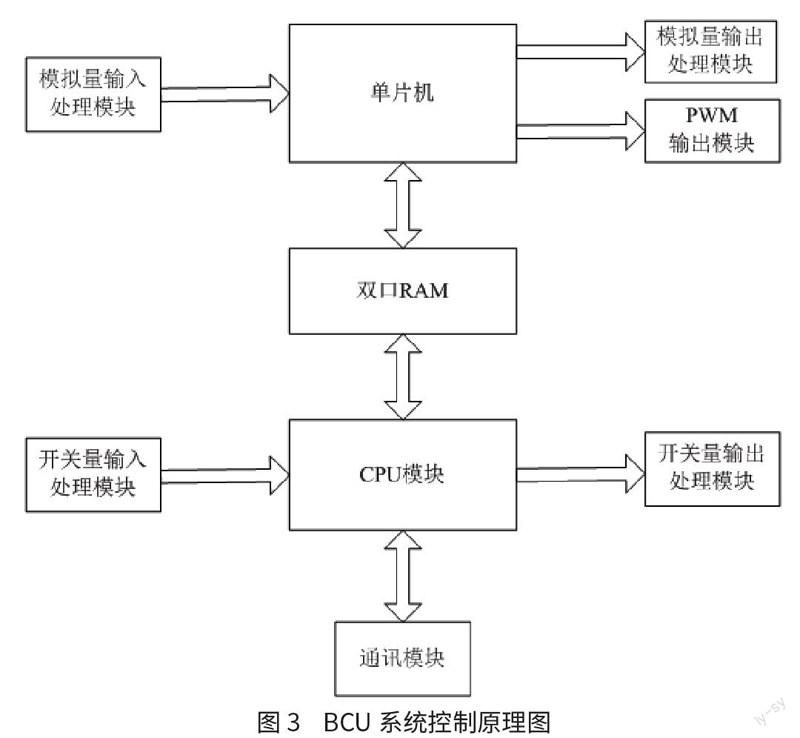
3.1 BCU制動控制系統控制原理
系統控制單元采集相應管路、風缸的壓力、流量參數信息,經過CPU處理輸出電控信號,控制相應開關閥、電控閥動作,實現快速充、排風,其中均衡風缸56的壓力由調壓閥55,高速電控開關閥257YV、258YV,保護電空閥319YV及壓力傳感器204BP等組成的均衡風缸EP控制單元實現閉環控制。它通過控制機車列車管的充、排風來實現對整列車的緩解、制動的控制,控制原理與DK-L基本相同[3]。機車的單獨制動,由分配閥根據列車管壓力變化來控制,單獨控制由改造后的單制電空閥244YV、單緩電空閥245YV的得失電來控制。
3.2 BCU制動控制系統的功能
具有階段緩解和一次緩解選擇功能;具有列車管補風/不補風功能;具有無動力回送功能;具有備用制動功能;具有重聯功能;具有斷鉤保護功能;與列車監控裝置配合的功能。
4BCU制動控制系統故障的診斷及處理方法
BCU制動控制系統發生單一故障時,與DK-L系統的制動機故障分析、處理過程基本一致,主要為分析、反饋、處理三個階段,當發生多點復雜故障時,需要借助BCU制動控制系統的數據監測及存儲功能,復現故障時的閥件控制信號、動作時間、相關部件壓力參數,判斷具體故障環節、部位,提高處置效率。
4.1 邏輯分析
根據故障現象,結合系統邏輯控制原理,系統分析空氣制動系統中電空控制和動作環節,逐一對電氣和空氣管路及氣動元件分析,確定故障范圍。一個故障造成的原因可能有好幾個,應力求準確全面地找出故障點。
4.2 故障反饋
經過分析和檢查,沒有找出故障點時,就要結合系統監控存儲的數據及控制單元數顯代碼查找分析異常數據產生的原因,再對具體環節關聯的部位進行逐項排查處理。
4.3 故障處理
故障處理往往很依賴實際工作經驗。而BCU采用先進的表面貼片技術,并將其與功能強大的多任務實時操作相結合,具有機車制動機模擬控制,機車制動機狀態監控及故障檢測,診斷、顯示、告警記錄、網絡通訊、單機自動測試等功能。結合實際運用情況,來分析幾個典型的故障現象:
4.3.1司機室均衡風缸表針與列車監控系統壓力不一致
觀察均衡風缸表針與列車管表針,發現表針顯示也不一致。故障分析故障點有:均衡風缸雙針表壞或者監控壓力傳感器故障引起。在不能確定是由哪個部件所引起的故障時,BCU的制動機狀態監控就能夠顯示出各管路的壓力狀態,分析比較出哪部分有可能出現故障。在BCU主機的控制板上,依次操作F1按住5s,數碼管會顯示出U00~U99,U**分別代表著不同的定義,U10代表均衡風缸管壓力,U11代表列車管壓力,U12代表總風管壓力,U13代表閘缸管壓力,F2、F4為上下選擇鍵,選擇所需要的數據U10,按F3確認,此時數碼管會顯示出均衡壓力,拿此數據與風缸表及監控數據做對比,發現風表和BCU的顯示是一致的,判斷出列車監控系統的壓力傳感器故障,更換后故障消除。
4.3.2 機車在停放狀態時突然起緊急制動
檢修人員試驗多次均未出現故障現象,通過視頻監控和列車監控數據分析,排除人為操作引起。進一步分析機車的緊急制動有5種原因引起:斷鉤保護緊急信號、緊急按鈕緊急信號、監控緊急信號、手拉列車管閥緊急信號、制動控制器緊急信號。下載主控機車及從車BCU數據分析,發現從車的均衡風缸壓力處于無壓力狀態長達30 min,中繼閥鞲鞴犯卡,使得列車管與其的壓力不平衡,由于鞲鞴的突然動作使得列車管放風,更換中繼閥后實驗正常。
4.3.3制動屏柜出現異常間歇性排風聲
結合機車BCU數據分析,發現高速電控閥257YV頻繁動作,由于BCU有自動補風功能,當有壓力泄漏時,BCU會自動給均衡風缸補風,使得列車管保持它的控制壓力,現場檢查電控閥257YV密閉性不良,更換高速電控閥257YV后實驗正常。
以上幾個典型的故障可以看出,以往處理故障使用排除法,與故障有關聯的部件逐一做出排除,往往耗費大量的時間和工作經驗來排除,而現在BCU的升級擴展自檢、儲存功能及數據記錄等,很直觀地從控制面板的燈顯和軟件的分析上來判斷故障,可以大幅縮短查找故障的時間。結合配備的分析軟件,直接準確地找出故障點,達到故障快速處理效果,從而減少機車的庫停時間及迫停區間時的搶修時間,提高了機車的周轉率和運用率,這樣使得重載鐵路運輸效益得以大幅提升。
4.4 安全操作注意事項
BCU系統應用于萬噸列車為重載列車,制動機的正常使用是機車安全運行的重中之重。所以對于制動系統的試驗制定以下幾點:
第一,萬噸編組前,機車進行單機制動系統試驗,要保證單機制動系統能夠正常使用才能進行萬噸編組。
第二,當機車掛好車輛進行萬噸編組完畢后,萬噸機車要對制動系統進行全面的試驗,要保證萬噸機車制動系統能夠正常使用,才能開車運行。
第三,運行當主車制動系統出現問題時,根據實際情況能維持運行的到前方站停車,如果無法維持時,匯報相關部門就地停車進行檢查。當從車制動系統出現問題時,將重聯開關“592QS”打“單機”位觀察情況,能維持運行的到前方站停車,如果無法維持時,匯報相關部門就地停車進行檢查。
5結語
隨著萬噸列車的開行,BCU制動控制系統實現了更短的停車距離、更快的充風時間和實時列車制動狀態監測與診斷,改善了司機對列車的操控,提高了制動系統的可靠性,為實現萬噸列車安全運行提供了安全保障。
參考文獻
[1] 劉豫湘,方長征,萬建兵.列車制動系統技術現狀及發展趨勢[J].電力機車與城軌車輛,2014,37(5):1-4.
[2] 馬大煒,王成國,張波.我國重載列車制動技術的研究[J].鐵道車輛,2009,47(5):8-11+48.
[3] 李益民.電力機車制動系統[M].北京:中國鐵道出版社,2008.
