基于壓縮感知的機載雷達GLRT檢測器
2022-06-02 06:57:24葉鵬宇
無線電工程 2022年6期
關鍵詞:檢測
張 焱,葉鵬宇
(1.中國電子科技集團公司第五十四研究所,河北 石家莊 050081;2.陜西千山航空電子有限責任公司,陜西 西安 710065)
0 引言
雷達目標檢測是雷達最重要的功能之一,隨著雷達技術的發展,雷達的分辨率越來越高[1-3]。在雷達分辨率較低時,目標呈現點狀,而雷達分辨率高時,點目標就可能變成擴展目標[4-5]。
隨著Kelly[6]開創性地提出Kelly的廣義似然比檢驗(Generalized Likelihood Ratio Test,GLRT)檢測器,雷達目標檢測算法飛速發展。而Robey等[7]提出了具有恒虛警特性(Constant False Alarm Rate,CFAR)的自適應匹配濾波(Adaptive Matched Filter,AMF)檢測器并證明其在某些情況下比Kelly的GLRT檢測器性能好。隨著雜波模型的發展,原本的高斯模型不再適用于一些非均勻的雜波情況,復合高斯模型被提出[8]。隨之被提出的是自適應正則化匹配濾波(Adaptive Normalized Matched Filter,ANMF)檢測器,或者稱為自適應一致估計器(Adaptive Coherence Estimator,ACE),該檢測器相對于協方差矩陣具有CFAR特性[9-10]。
由于一些先驗知識能夠被提前獲取,比如先驗雜波譜,對基于各種先驗知識的檢測器進行研究。文獻[11]研究了機載多輸入多輸出(Multiple-Input Multiple-Output,MIMO)雷達下點目標的知識輔助檢測器。文獻[12]研究了在非均勻環境下具有CFAR特性的知識輔助(Knowledge-Aided,KA)雷達檢測問題。文獻[13]研究了KA在被動雷達中的檢測問題。然而有時候先驗知識并不是很準確,文獻[14]研究了在不準確先驗知識下的自適應子空間檢測問題。
自從Donoho提出了壓縮感知(Compressive Sensing,CS)的概念,就被用于檢測問題。文獻[15-17]討論了CS在現代雷達中的應用,文獻[18]研究了CS在機載MIMO雷達中的子空間檢測問題。
MIMO雷達是指多發多收天線體制的雷達,在分辨率、目標檢測性能和目標參數估計性能等方面具有更優良的性能。在分布式MIMO雷達中也能夠很好地解決在相控陣雷達中常常遇到的目標截面積(Radar Cross Section,RCS)起伏的問題,使MIMO雷達相比于相控陣雷達具有明顯的優勢。同時,MIMO雷達的發射端和接收端都由多個天線組成,每個發射天線能夠發射相互正交的信號,在空間中只進行功率的疊加,明顯改善了雷達主瓣抗信號截獲能力,在存在復雜有源干擾的現代戰爭環境中的雷達生存具有重要意義。綜上,MIMO雷達的許多優勢使得MIMO技術在機載雷達的應用中具有廣闊的前景。
本文主要研究了機載雷達對地面動距離擴展目標的探測問題。在已知先驗雜波譜的情況下,利用知識輔助來設計檢測器;在未知先驗雜波譜的情況下,利用CS來設計檢測器。在仿真中,把提出的檢測器與傳統的檢測器進行了比較,提出的檢測器表現出不錯的性能。
1 信號模型和問題描述
考慮機載相控陣雷達裝有N個均勻線陣(Uniform Linear Array,ULA),每個陣元在一個相干處理間隔(Coherence Processing Interval,CPI)里發射M個相干脈沖,則該機載雷達經過匹配濾波后的接收信號可以表示為:
x=[x1,1,x2,1,…,xN,1,…,xN,K]T=
αar(fs)?ad(fd)=αar(fd,fd),
(1)
式中,?和(·)T表示kronecker乘積和轉置操作;α為未知復幅度;接收空域導向矢量ar(fs)和多普勒導向矢量ad(fd)分別為:
ar(fs)=[1,ej2πfs,…,ej2π(N-1)fs]T,
ad(fd)=[1,ej2πfd,…,ej2π(M-1)fd]T,
(2)
式中,歸一化空間頻率fs=dsinθcosφ/λ;歸一化多普勒頻率fd=2vsinθcosφ·Tr/λ,Tr為脈沖重復周期,λ為波長,d為陣元間距,v為載機速度,θ為方位角,φ為俯仰角。機載雜波示意如圖1所示。
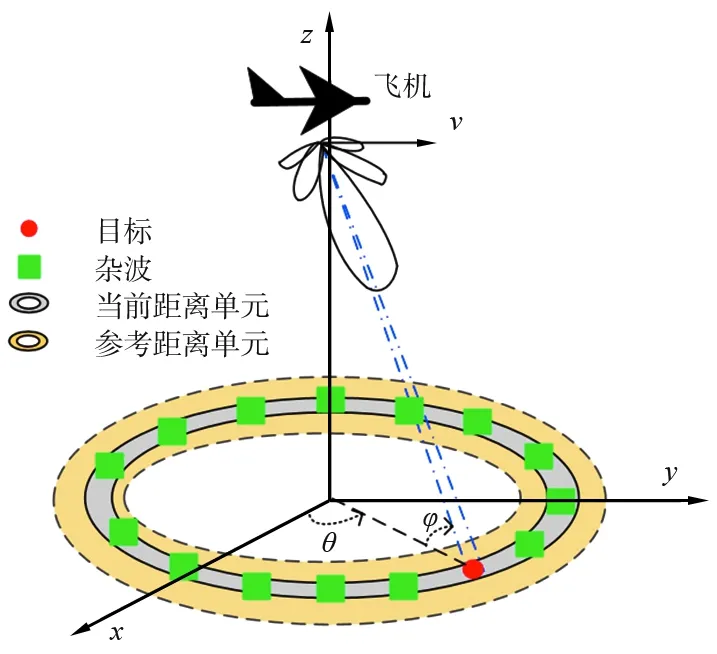
圖1 機載雜波示意Fig.1 Schematic diagram of airborne clutter
圖1中,機載雷達工作在正側視模式,載機以速度v沿y軸方向飛行,雷達陣列方向與飛行方向平行。在實際應用中,大多使用面陣。當使用面陣時需要先進行按列微波合成,可以將面陣的每一列看作一個陣元,所以使用線陣推導回波模型具有代表性。當載機平臺以速度v飛行時,與載機距離相同的一個環形地面區域看作一個雜波環,可以將地面按距離劃分為多個雜波環,雜波環的寬度取決于雷達的距離分辨率。
機載雷達的距離擴展目標檢測問題可以描述為:
(3)
式中,L為距離擴展目標數;K為參考距離單元數;βk為未知確定性復幅度;s為目標的空時導向矢量;xk,k=1,2,…,L為待檢測距離單元的回波數據;xk,k=L+1,L+2,…,L+K為參考距離單元的回波數據;nk,k=1,2,…,L+K為第k個距離單元的噪聲數據,建模為零均值協方差矩陣為σ2I的高斯白噪聲,即nk~N(0,σ2I);ck,k=1,2,…,L+K為第k個距離單元的雜波數據,ck=Aαk被建模為不同方向的雜波片回波之和,其中陣列流形矩陣A定義為:
(4)
i=0,1。
(5)
在Hi,i=0,1假設下,待測單元的聯合PDF可以寫成:
i=0,1,
(6)
式中,X=[x1,x2,…,xL],β=[β1,β2,…,βL],Λ=[α1,α2,…,αL]。根據GLRT準則有:
(7)
2 基于知識輔助和壓縮感知的檢測器設計
基于KA和CS設計不同場景下的檢測器,在已知先驗雜波譜的情況下,利用該先驗知識設計檢測器。若先驗雜波頻譜未知,利用CS的稀疏恢復性重構雜波,從而設計檢測器。
2.1 知識輔助檢測器
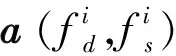
飛機正側視觀察地面目標時,其雜波回波的頻譜是一條直線,稱之為雜波脊,如圖2所示。
圖2 機載正側視雜波脊示意Fig.2 Airborne side-looking clutter ridge
在這種情況下,可以利用該先驗知識,雜波能量主要集中在空時功率譜中的雜波脊上,可以用基于雜波功率譜的方式表示,即:
Aα≈V?,
(8)

i=0,1,
(9)
式中,Θ=[?1,?2,…,?L]。對式(9)取對數關于參數σ2求最大似然,得到噪聲功率的最大似然估計(Maximum Likelihood Estimate,MLE)為:
(10)
令yk=xk-iβks,將噪聲功率的MLE帶入式(9)得到:
(11)
求參數?k的MLE,相當于求:
(12)

(13)
對βk求MLE,令P⊥=I-V(VHV)-1VH表示與V正交的投影矩陣,得到βk的MLE為:
(14)
將各個參數的MLE值帶回GLRT準則得到基于KA的檢測器(KAD):
(15)
2.2 壓縮感知檢測器
當先驗雜波頻譜未知或者不準確時,可以利用稀疏恢復解決檢測問題。對于稀疏恢復的算法,目前主要分成2大類:一類是以基追蹤(Basis Pursuit,BP)為代表的凸優化算法;另一類是以正交匹配追蹤(Orthogonal Matching Pursuit,OMP)為代表的貪婪算法及這2類算法的衍生算法。隨著深度學習技術的發展,基于深度學習的CS算法也被提出,如長短期記憶(Long Short-Term Memory,LSTM)及稀疏貝葉斯學習(Sparse Bayesian Learning,SBL)算法。這幾類算法都可以運用到時域稀疏的情況,但針對頻域稀疏的情況,目前用的比較多的是OMP和SBL算法。以上CS主要針對向量恢復的問題,文獻[19]中提出了2種針對矩陣稀疏恢復的解決方法——T-SBL和T-MSBL,通過對矩陣進行列向量化,每一列分別進行CS稀疏重構,最后再將恢復向量拼起來得到恢復矩陣。
對式(5)取對數求最大似然,可以得到噪聲功率的MLE:
(16)
令yk=xk-iβks,將噪聲功率的MLE代入式(5)得:
(17)
求參數αk的MLE,相當于求:
(18)
在未知先驗雜波譜的情況下,A矩陣未知,利用CS的方法來解決該問題。使用字典矩陣φ來代替雜波矩陣A,得到:
(19)

(20)
將以上所有參數帶回GLRT準則得到基于壓縮感知檢測器(CST):
(21)
3 檢測性能仿真
本節進行仿真實驗來評估所提出檢測器的檢測性能。考慮帶有N=2陣元ULA的相控陣,每個陣元在一個CPI內發射M=4個相干脈沖。參考距離單元的樣本數為K=24。假設陣元間距為半波長,即d=λ/2,載機的速度為v=125 m/s,飛行高度為h=3 000 m。信雜噪比的定義為:
(22)
式中,R為雜波加噪聲協方差矩陣。設置虛警概率為Pfa=10-3,蒙特卡羅仿真次數預設為10/Pfa=104。列舉出傳統的KAAM和AMF檢測器方便比較:
(23)
(24)
信雜噪比和檢測概率的對比如圖3~圖5所示。
由圖3~圖5可以看出,在先驗知識不完全準確的情況下,采用CS設計的檢測器CST性能比知識輔助檢測器KAT、傳統的KAAM檢測器和AMF檢測器要好,且KAT檢測器的性能也優于傳統的KAAM檢測器和AMF檢測器。

圖3 信雜噪比和檢測概率的對比(L=1,N=2,M=4,K=24)Fig.3 Signal-to-noise ratio vs detection probability (L=1,N=2,M=4,K=24)
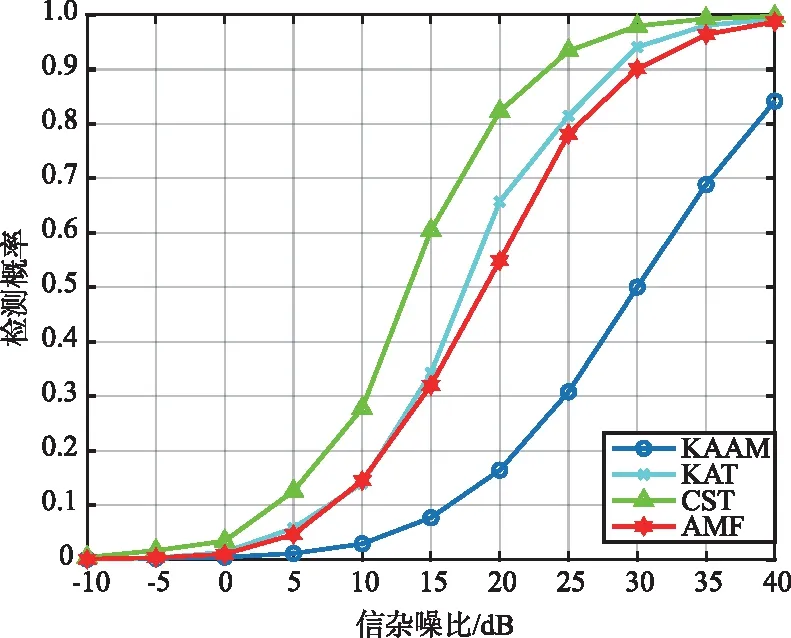
圖4 信雜噪比和檢測概率的對比(L=1,N=1,M=8,K=24)Fig.4 Signal-to-noise ratio vs detection probability (L=1,N=1,M=8,K=24)
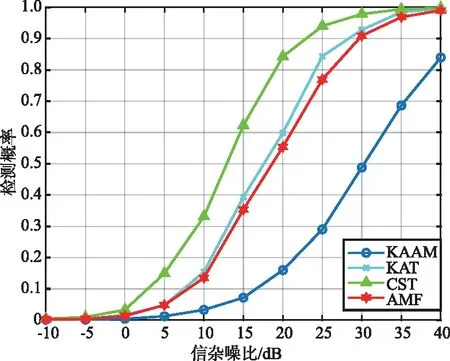
圖5 信雜噪比和檢測概率的對比(L=1,N=8,M=1,K=24)Fig.5 Signal-to-noise ratio vs detection probability (L=1,N=8,M=1,K=24)
4 結束語
MIMO雷達憑借其諸多優勢迅速發展起來。相比于傳統相控陣雷達只能發射特定波形的雷達信號,MIMO雷達能夠控制其陣元發射獨立的波形從而提高了目標檢測、定位能力,使得雷達具備更高的空間分辨率。同時,當MIMO雷達發射正交信號時,具備很強的抗截獲能力,這增強了MIMO雷達在復雜戰場環境下的適應能力。本文選擇了機載雷達作為研究對象,研究了機載雷達在已知先驗知識和未知先驗知識下的距離擴展目標檢測。分別利用知識輔助和CS在已知先驗雜波譜和未知雜波譜情況下設計2種檢測器,即KAT和CST。仿真結果表明,與傳統的機載檢測器相比,2種提出的檢測器在檢測性能上有所提升。
在機載MIMO雷達的研究中還存在很多問題值得深入討論。如在非均勻雜波環境下的目標檢測問題,通常使用相鄰距離環來估計當前探測目標的雜波協方差的方法,這種方法基于相鄰環境雜波特性完全相同的假設。但是在實際應用中,相鄰距離環的特性普遍是不同的,這種非均勻性會大大降低雷達探測目標的性能,同時當相鄰距離環內存在相似探測目標時,也會影響目標探測性能。在機載MIMO雷達研究中,如何針對環境的非均勻性來設計目標檢測算法仍然是未來研究發展的重要方向。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
