基于改進引力搜索算法的高速并聯機器人軌跡優化
2022-06-02 08:10:30徐巖
食品與機械 2022年5期
徐 巖
(綏化學院,黑龍江 綏化 152061)
高速并聯機器人被廣泛應用于食品、醫療等諸多領域[1-2]。為了提高生產線上高速并聯機器人的工作效率,國內外學者對其運動軌跡的規劃開展了大量的研究。張好劍等[3]將改進遺傳算法用于高速并聯機器人的路徑規劃,發現其能有效降低分揀行程,而且平均分揀效率較優化前提高了14.76%;解則曉等[4]利用電機輸入電能和機器人機械能消耗兩個能耗指標,對9種軌跡優化方法參數進行了優化,發現Bang-Bang運動定律的分段多項式曲線是最優軌跡,具有時空可重復性;章鴻[5]提出了一種基于三次樣條函數的高速并聯機器人軌跡規劃方法,該法可以改善機器人的工作空間,提高機器人末端執行器的穩定性;郭俊等[6]提出了一種基于蟻群算法的軌跡規劃方法,減小了末端執行器的抖動,提高了設備運行的平穩性。上述方法可以生成滿足各種復雜約束條件的運動軌跡,但計算效率低、穩定性差。
基于此,研究擬將運動軌跡規劃方法用于高速并聯機器人末端執行器的軌跡優化,旨在為高速并聯機器人軌跡規劃方法的研究提供依據。
1 系統概述
圖1為高速并聯食物拾放機器人的結構,其主要由靜平臺、動平臺、主動臂、從動臂、減速器及電機五部分組成[7]。驅動電機固定在靜平臺上,從動臂通過球鉸與動平臺連接;主動臂和從動臂組成支鏈,動平臺由主平臺和輔助平臺組成。
2 末端執行器軌跡優化
2.1 運動軌跡模型
在末端執行器拾放操作過程中,拾放點的角速度和加速度為零,轉角平滑,加速度連續[8]。通過上述分析建立規劃模型。以運動時間最低和加加速度變化最小為目標,以速度和加速度在合理范圍內為約束條件,建立多約束、多目標、非線性高速并聯機器人末端執行器規劃模型,如式(1)和式(2)所示。
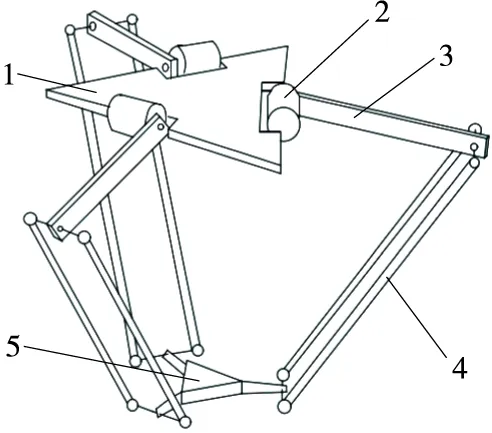
1.靜平臺 2.減速器及電機 3.主動臂 4.從動臂 5.動平臺圖1 并聯機器人結構Figure 1 Parallel robot body
(1)
(2)
式中:
ti——靜平臺上3個驅動電機的運動時間,s;
θi——靜平臺上3個驅動電機的旋轉角度,rad;


Vmax——關節最大角速度,rad/s;
amax——關節最大加速度,rad/s2。
選取權重系數k1和k2,根據特定的比例關系結合運動周期目標和加加速度目標,然后用改進算法求解模型[9]。
2.2 改進引力搜索算法
引力搜索算法(GSA)在處理優化問題的過程中,種群中所有個體之間的信息按照萬有引力定律進行傳遞,使個體相互作用,最終聚集在一起獲得最優解[10]。GSA具有良好的全局搜索能力。然而,GSA也存在一些問題,如早熟收斂和求解精度差等問題[11]。因此,從初始種群優化、引力常數優化和個體逃逸優化3個方面進行了改進。
2.2.1 初始種群優化 初始種群分布均勻合理,非常有利于算法求解。因此,引入了一種用于初始種群選擇的對立學習策略[12]。

Xi=(xi1,xi2,…,xij,…,xiD)。
(3)
其中,xij∈[aj,bj],i=1,2,…,N,j=1,2,…,D。
采用對立學習策略可以通過初始種群Rx獲得對立種群Ox,如式(4)所示[14]。
(4)

(5)
從原始種群中獲得的對立種群Ox與原始種群Rx相結合,形成新的初始種群{Rx∪Ox}。引入對立學習策略后,種群適應度值的解不僅包括初始種群的解,還包括對立種群的解,提高了算法效率[15]。
2.2.2 引力常數優化 參數α對G值有很大影響,通過控制參數α的值,可以間接影響加速度的變化,以控制收斂速度。將模糊控制引入參數α的控制中,具體步驟:
步驟1:對種群特征進行分析。引入種群豐富度RN和發展度AN,種群豐富度表示種群在解中的位置,其與個體在解中的分布有關,RN越高越不易陷入局部極值,在參數處理中,引入RN來評估搜索范圍內個體的理想分布,如式(6)所示[16]。
(6)
式中:
N、D——個體數和維度;
RL——最遠兩個個體之間的距離;
X——個體位置;
k——迭代次數;
RN——種群豐富度,(0,1)。
根據算法中的個體適應度值設計發展水平AN。負值表示發展方向的偏離,算法解偏離最優解。對于模糊控制,需要評估RN、AN、k和α(t-1),以獲得其結果α(t)。
步驟2:設定評估標準。根據需求,將隸屬度分為上、中、下三級。表1為參數RN、AN、k、α(t-1)的取值與隸屬函數的關系。
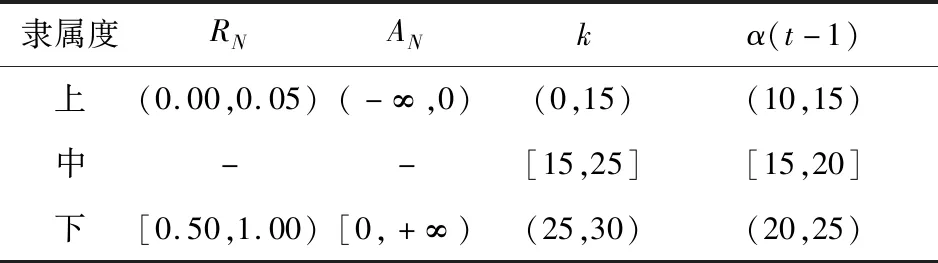
表1 不同等級參數取值范圍Table 1 Value range of different grade parameters
步驟3:參數α模糊處理策略。根據步驟1和步驟2中選擇的參數,根據表2中的策略選擇參數α值。

表2 取值規則表?Table 2 Value rule table
2.2.3 個體逃逸優化 在GSA優化過程中,由于初始種群選擇不足會使多個個體逃逸,在限定區分布非常密集,對算法的性能產生非常大的影響[17]。因此,在處理個體逃逸問題時,引入界限異變,逃逸個體xi超過上限如式(7) 所示,超過下限如式(8)所示[18]。
(7)
(8)
式中:
xmax、xmin——逃逸個體的位置上、下限,mm;
u——異變參數(根據xmax與xmin進行選擇);
rd——隨機變量,[0,1]。
使用上述處理方法,當個體超過限值時,可以避免逃逸個體最終集中在界限上,分散算法的搜索方向,降低搜索速度。
圖2為改進引力搜索算法的流程圖。

圖2 改進引力搜索算法流程Figure 2 Improve gravitational search algorithm process
3 仿真結果與分析
3.1 仿真參數
仿真設備為華為PC,操作系統為windows 10 64位旗艦,11代酷睿i7 CPU,主頻2.5 GHz,內存16 GB,仿真平臺為MATLAB r2018a[19]。表3為高速并聯機器人的基本參數。
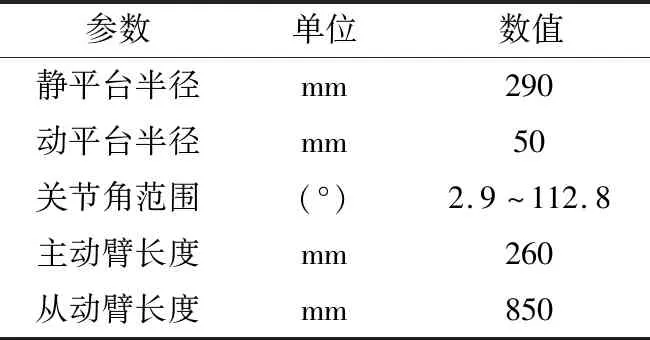
表3 機器人基本參數Table 3 Robot basic parameters
高速并聯機器人拾放路徑為高度25 mm、長度305 mm的類門字型路徑。算法約束:最大角速度Vmax=10 rad/s,最大角加速度amax=400 rad/s2。初始種群中的個體數N=40,算法的最大迭代次數為30,單次作業時長0.01~0.20 s。食品拾放對工作效率要求較高,將權重系數設置為k1=0.8,k2=0.2。
3.2 仿真分析
為了驗證試驗算法的可行性,采用標準引力搜索算法(GSA)和試驗算法分別求解了4-3-4規劃模型和5-3-5規劃模型。分析單次作業時長t(半運動周期)和加加速度的求解結果,對20次的結果進行記錄,獲得了單次操作的最短操作時間和平均操作時間,結果如表4所示。
從表4可以看出,試驗算法得到的4-3-4規劃模型最短單次運行時間為0.168 9 s,GSA的最短單次運行時間為0.172 2 s。相同算法下,4-3-4規劃模型得到的規劃結果均優于5-3-5規劃模型的。因此,試驗算法得到的運動軌跡設計方案更符合預期要求,可以最大限度地提高機器人的性能,確保穩定性。
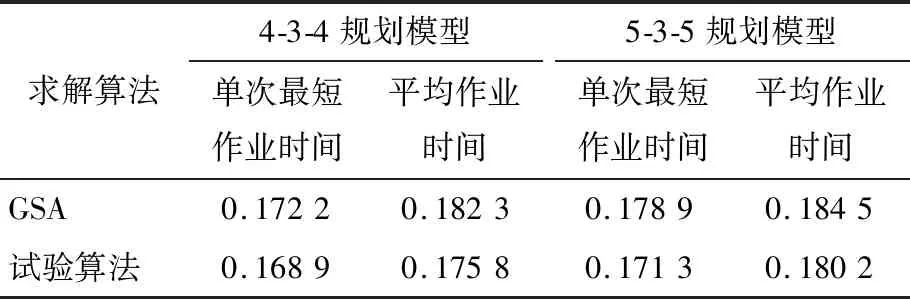
表4 不同算法的規劃結果Table 4 Planning results for different algorithms s
為了驗證試驗算法的優越性,在4-3-4規劃模型下,進一步分析了運動周期與抑振效果的關系。加速度變化越小,對機構振動的抑制效果越明顯,高速并聯機器人運動越穩定。由于軌跡規劃模型還包括運動周期的時長,有必要分析兩者之間的關系。
設置不同的k1和k2系數,并將其代入模型中,通過改進算法求解模型,單次作業周期曲線和加加速度變化曲線如圖3和圖4所示。
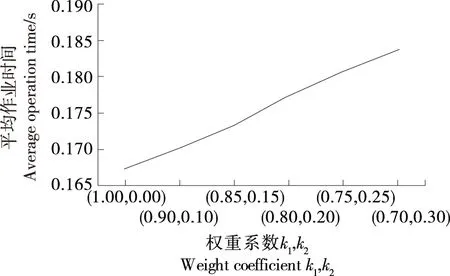
圖3 單次作業時長變化曲線Figure 3 Single operation time change curve
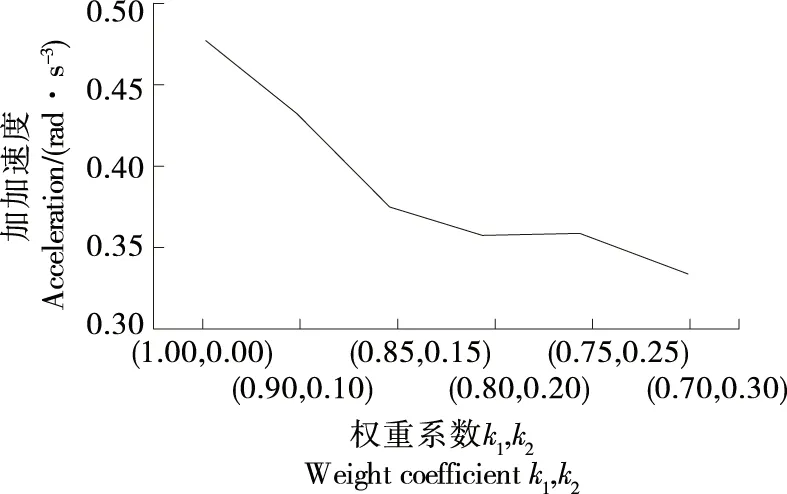
圖4 加加速度變化曲線Figure 4 Acceleration curve
從圖3和圖4可以看出,在不同權重系數下獲得的最優解結果存在一定的偏差。在相同的仿真條件下,縮短運動時間和抑制振動的效果為對偶關系。如果運動周期的權重因子較高,則抑制振動的效果較弱。如果加加速度的權重因子較高,則平均作業時間會在一定程度上增加,這會降低高速并聯機器人拾放效率。因此,當對高速并聯機器人的作業周期要求較高,而對拾放穩定性要求較低時,可以將k1值設置得較大;當高速并聯機器人拾放穩定性要求較高且作業周期要求寬松時,可將k2值設置得較大。基于此,可以根據不同的操作要求靈活設定規劃目標以滿足不同的需求。
4 結論
基于高速并聯機器人的體系結構,提出了一種運動軌跡規劃方法用于高速并聯機器人末端執行器的軌跡優化。建立多約束、多目標、非線性軌跡優化模型,并通過改進的引力搜索算法求解。結果表明,與改進前的規劃方法相比,所提方法效率更高,能夠在較短的時間內完成拾放任務,單次操作的最短時間為0.169 1 s。鑒于目前的試驗設備和數據規模,高速并聯機器人相關技術的研究尚處于起步階段,試驗僅研究了高速并聯機器人末端執行器的運動軌跡規劃方法,未對其動力學和控制系統進行研究。在后期階段,應不斷完善高速并聯機器人的相關功能,以適應未來不斷變化的應用環境。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
公民與法治(2020年11期)2020-07-25 02:02:06
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
