基于模型的并網逆變器早期故障參數辨識
2022-06-09 02:28:42樊鵬帥帕孜來馬合木提魏勝風
三峽大學學報(自然科學版) 2022年4期
樊鵬帥 帕孜來·馬合木提 魏勝風 劉 碩
(新疆大學 電氣工程學院,烏魯木齊 830046)
并網逆變器在實際運行中,由于受到外部工作環境及內部電熱應力的影響,系統元器件的標稱參數會發生退化現象.一般情況下,器件參數退化過程的特點是緩慢的、隨機的,并伴有非線性和不確定性.當參數退化超出閾值即產生參數性故障.此類故障出現后通常不會使系統立即停機,但會使系統功能衰退陷入不確定狀態,并誘發連鎖效應:使系統輸出特性逐漸改變,影響電能質量或逐步演變為嚴重的結構性故障,造成人員傷亡和財產損失.為了確保系統的安全平穩運行,需要在嚴重故障出現之前對故障源進行隔離.因此,針對系統開展早期故障診斷研究具有十分重要的現實意義.
近年來,非線性動態系統的故障診斷技術研究越來越受到重視.相關學者先后提出了大量的解決思路和方法[1].其中,基于模型的診斷方法(model based diagnosis,MBD)由于具有故障檢測能力強和精度高等優點而受到廣泛關注.具體實現機理在于需確定系統中各目標參數之間的映射關系,分析系統各故障模式所導致的工作參數變化,從而構建起系統模型.通過使用描述最貼近系統實際過程的數學模型,結合相關系統狀態估計方法,把所研究對象的實際測量量與模型所表達的先驗量加以對比而獲得殘差,通過對殘差的分類處理進而實現故障源的診斷隔離.
牛剛等[2]對機車系統進行了BG建模,通過殘差信號實現了對故障器件的診斷.彭小輝等[3]針對航天器推進系統的相關特性通過Z檢驗分析與GARRs相結合的方法,實現了對故障部件的診斷.文獻[4]通過對NPC型逆變器進行BG建模并設計了自適應閾值,減少了誤報警,完成早期故障源的定位.上述文獻均是在建立診斷對象的BG模型后,推導出系統的GARRs,然后獲得故障特征矩陣(fault signature matrix,FSM),最后將系統的實際觀測特征向量與FSM對比,得出診斷結論.然而上述方法只能檢測到故障的發生,定位到退化故障部件,并不能對部件的退化程度做出判別.從故障診斷與隔離(fault diagnosis and isolation,FDI)的角度出發,當檢測系統追蹤到故障源時就需要獲得元件的損傷度.所以一旦發現故障源,能估計故障器件的參數值就比較重要.
參數辨識是通過相關算法來估計所研究系統中的不確定性參數,應用于FDI時主要是分析系統的退化參數,評估當前系統的健康狀態.從FDI角度出發,參數辨識研究從一定程度來講既是對故障檢測的驗證也是對它的定量分析.因此,針對已發生退化行為的系統開展參數辨識研究對系統的早期故障診斷及壽命預測都具有重要意義.文獻[5-6]通過混合邏輯動態建模,分別建立了電力電子電路開關器件導通與關斷條件下的狀態方程,并將不同模態下的電路方程整理得到電路混雜模型,實現了DC/DC電路的參數辨識.然而,對于具有多個開關管的復雜電路,系統有較多模態相互耦合,使得該建模方法變得十分繁瑣且困難,難以實現系統內目標參數間作用機理的描述.
因此,本文以三電平T型逆變器主電路為研究對象,基于BG理論建立系統的HBG模型,通過觀測信號和系統行為約束關系推導出了能夠反映系統內部各系統參數之間相互作用關系的GARRs,并由GARRs構造出目標函數,進而將系統參數的辨識問題轉化為對函數的優化問題,最后通過SSA算法對目標函數進行參數尋優,完成參數辨識.
1 相關背景
1.1 T型逆變器簡介
T型逆變器目前已經廣泛應用于光伏逆變等領域,主電路拓撲結構如圖1所示,開關狀態及輸出電壓見表1.
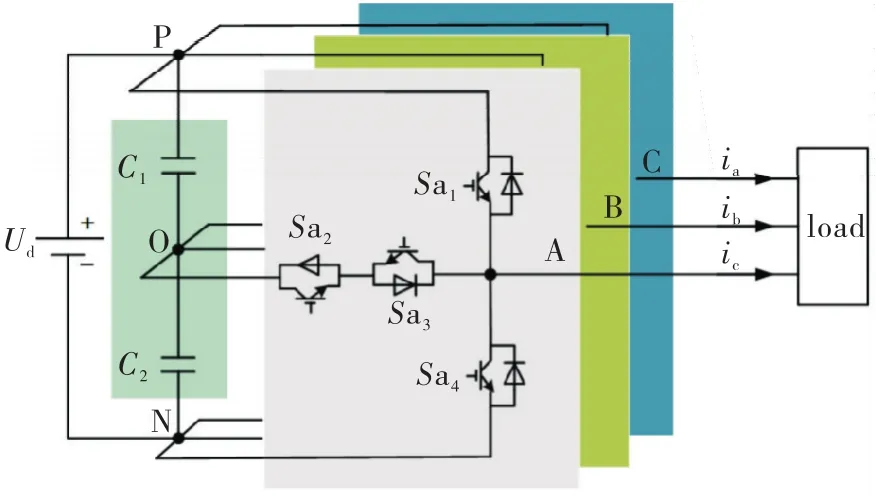
圖1 T型逆變器拓撲結構圖
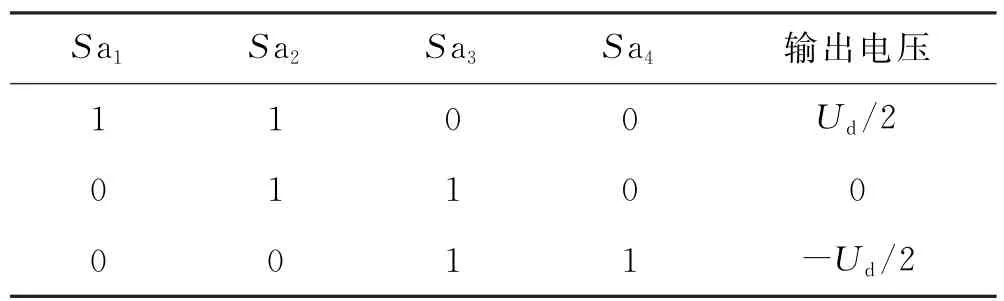
表1 開關狀態及其輸出電壓表
1.2 鍵合圖理論
鍵合圖全稱為功率鍵合圖,是物理系統的圖形化表示.BG理論按照一定規則采用鍵合圖符號語言{Se,Sf,R,C,I,TF,GY,1-,0-,De,Df}等鍵合圖元、鍵、通口來描述所研究對象.
在BG建模時,實際物理系統以功率鍵為能量媒介,由通口實現子系統間的能量傳遞.系統通過勢源Se、流源Sf、耗能元件R、儲能元件C(容性)和I(慣性)、變換器TF、回旋器GY、共流結1-結、共勢結0-結等BG元件按相應規則構建成BG模型[7].應用于電氣系統時,電變量與BG廣義變量的對應關系見表2.

表2 電變量與BG廣義變量對應關系
1.3 系統退化特征
相較于結構性故障,參數性故障發生后,系統輸出在一段時間內并不產生較為明顯的變化,然而系統本身卻陷入退化狀態.相關研究表明,功率開關是系統中最為脆弱的元件,引起功率器件IGBT性能退化失效的原因主要分為兩大類:物理層失效和電氣失效.浙江大學劉丹等[8]通過實驗研究,提出將IGBT導通電阻Ron作為器件退化指標.文獻[9-10]指出Ron是監測功率開關器件健康狀態的預兆參數,并定義導通電阻值增加了初始值的25%作為其失效判定標準.文獻[5]指出,同等的溫度條件下,當電解電容的容值C減小20%或者等效串聯電阻RC增加為初始值的2~3倍時,該電容可視為失效.
2 基于BG理論的數學模型建立
2.1 鍵合圖模型搭建
由于功率開關器件IGBT的存在,逆變器系統正常工作情況下在各工作模態間相互切換,導致系統離散事件和連續事件相互耦合,呈現出強非線性特征,屬于典型的混合系統.目前,逆變器的數學模型多基于基爾霍夫定律列寫狀態方程獲得,狀態變量選取與儲能元件有關,且較少涉及包含主電路中非理想器件的系統運行機制的建模.以BG方式建模的優勢在于能夠從能量角度出發建立起系統的元件級模型,從而對逆變器這類混雜電路內部器件間的相互作用關系進行充分且完備的描述.本文考慮的非理想功率器件IGBT以導通電阻Ron為退化特征參數,建模過程中以鍵合圖1通口阻性元件R表示.
根據鍵合圖理論中的節點法[11]建模方法,所建立的三電平T型逆變器HBG模型如圖2所示.為方便起見,每相輸出負載以R-L代替,如果考慮濾波裝置或者其他后延系統可繼續在每相輸出結點后進行BG建模.其中,直流側以勢源Se作為系統輸入,Rc1、Rc2分別為鉗位電容C1、C2的等效串聯電阻,11~14為開關結點,α取值為布爾變量{0,1},與控制信號SPWM有關.在鍵合圖工具20-sim中將阻性元件Ron與可調制變換器MTF相連以接收控制信號[12].Ca1、Ca2、Cg1是為消除代數環而存在,取值為一個極小的常數,對系統并不構成影響.
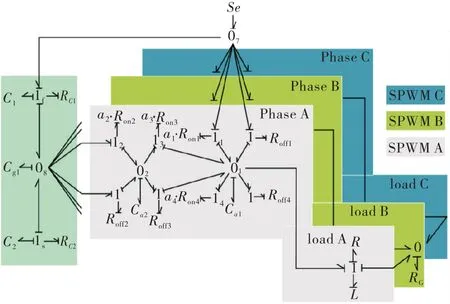
圖2 T型逆變器HBG模型
2.2 系統解析冗余關系
由HBG模型推導的GARRs以一種緊湊有效的方式描述了混合系統所有運行模式下的行為特征,由遍歷路徑法推導并消去未知變量而獲得的系統行為約束關系,包含了系統的控制信號、輸入信號、外部檢測量及系統本身結構參數等.在任何條件下,系統都滿足該行為約束關系.GARRs可以由式(1)表示為:

其中:ui為系統輸入參數;αi為控制量參數;θi為系統參數;Dei為勢傳感器采集量;Dfi為流傳感器采集量;i為參數個數;m為GARRs數量.
針對本文研究對象,均以A相為例進行說明.GARRs的推導過程可描述為:選定01、02、07、08、1f、1s這幾個結點來推導GARRs,先對所有功率鍵和各個結點進行標號,在結點01、02、07、08處分別加入勢傳感器De1、De2、De7、De8,在結點1f、1s(普通1-型結點)分別加入流傳感器Df1、Df2.T型逆變器A相的診斷鍵合圖如圖3所示.
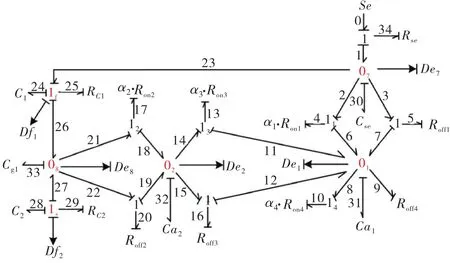
圖3 A相診斷鍵合圖
以01結點為例,存在式(2)的解析冗余關系:

式中:
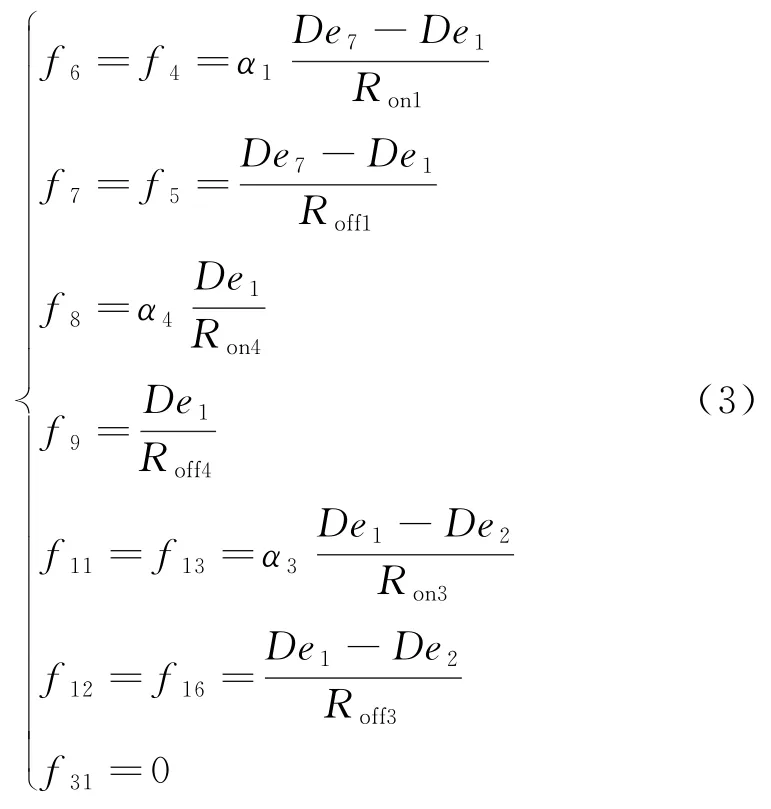
由式(2)和(3)得到01節點的GARRs為式(4):
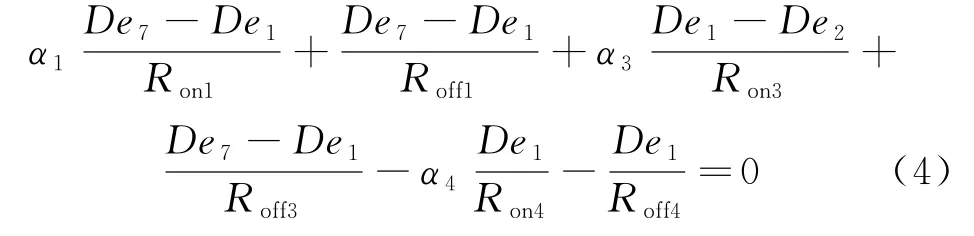
類似地,結點02、07、08、1f、1s的解析冗余關系式可以分別獲得.同理,在B相、C相相同位置放置De可進一步得到整個系統的GARRs.T型三電平逆變器的BG模型參數表見表3.

表3 T-BG模型參數表
2.3 目標函數構造
函數構造的機理在于:以系統待辨識的參數作為目標參數,考慮到實際情況,如果目標參數是系統中的真值,則通式(1)的值應為0或在近乎為0的小范圍內波動.則令Gj中θi={θia,θib},并以θia作為目標參數,表示從故障參數隔離模塊中選擇的故障參數集合,而θib代表已知的元素且不包含于集合θia的系統參數集合.構造出目標函數作為適應度函數,見式(5).由此將故障參數辨識問題轉化為對目標函數的優化問題.
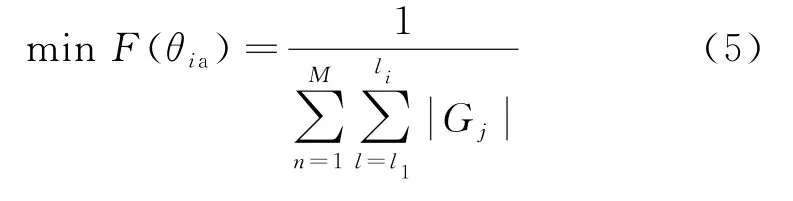
其中:M為監測信號有效采樣點數;li表示系統行為約束方程個數.將待辨識參數及采樣數據帶入目標函數,以θia作為目標參數通過極小化目標函數來尋求最優解,從而獲得故障參數θia.
采用GARRs估計目標參數時,只選擇包含目標參數的GARRs.這里,利用GARRs的優點特性可以建立M個采樣間隔的成本函數,這樣就能使用M個數據的集合來實現故障參數的故障估計,即使該系統在M個采樣間隔中歷經了運行模式的變化[13].
3 基于SSA的故障參數辨識
3.1 辨識模型
由1.3節,并網逆變器經過長時間服役后,內部相應元器件的參數退化將加重,而關鍵器件IGBT表現為導通電阻的增大.因此,本文以元件IGBT退化故障為故障因子進行基于SSA和BG模型的參數估計.系統BG模型如圖2所示,以A相為例,選擇關鍵器件以{Ron1,Ron2,Ron3,Ron4}作為故障源.整個辨識流程如圖4所示.
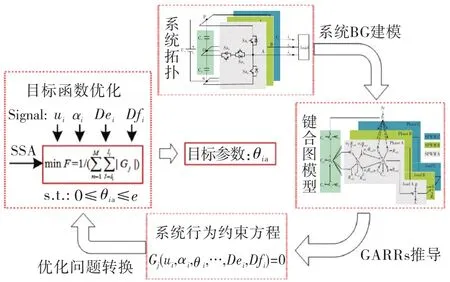
圖4 辨識流程圖
針對本文研究對象,可建立以下目標函數:
選擇目標參數θia={Ron1,Ron2,Ron3,Ron4},優化問題一般需要設置參數尋優范圍和約束條件,而θia在退化過程中是增大的,則可設定搜索范圍為:0≤θia≤e,其中e為元器件失效判定閾值.
3.2 麻雀搜索算法
SSA算法是在2020年由東華大學薛建凱提出的一種新型群智能優化算法[14].SSA模擬麻雀捕食過程進行迭代尋優,與其它智能算法相比,具有搜索能力強、穩定性好、收斂速度快、調節參數少等優點.由n只麻雀組成的解空間和適應度值空間可表示為式(7)形式.
式中:X代表種群集合;d代表優化問題變量維數;n為個體數量;F(x)為麻雀適應度值.
執行SSA時,發現者可視為種群的向導,其本身擁有較大的搜索空間,數量一般占據整個種群的10%~20%.而具有較好適應度值的向導可享有覓食空間內的優先權,并對整個種群包括加入者的覓食方向負責.
在每次迭代時,發現者位置按式(8)更新,加入者位置按式(9)更新,偵察者位置按式(10)更新.
式中:Xij表示第i只個體在第j維的位置,j取值范圍為[1,d];t代表當前迭代數;s為(0,1]的隨機數;rmax表示最大迭代次數;Q是服從正態分布的隨機數;L表示一個內部元素都為1的1×d的矩陣;la表示警戒值,取值范圍[0,1];Ts表示安全閾值,取值范圍[0.5,1].當la<Ts時,表示覓食環境安全,發現者可以執行搜索行為;當la≥Ts時,表示發現者種群發出報警,需要撤離.
式中:n為種群規模;Xp是當前向導所占據的最優位置;Xworst是當前全局最差位置;A為內部元素隨機賦值為1或-1的1×d矩陣,并且滿足A+=AT·(AAT)-1.當i>n/2時,適應度值較低的第i個加入者去別處覓食.
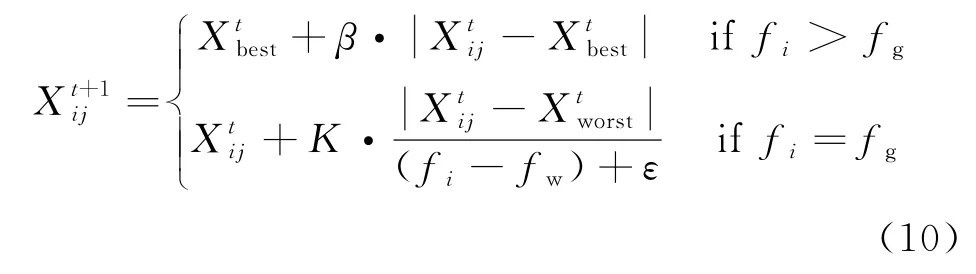
式中:Xbest為當前全局最優位置;步長控制參數β是服從均值為0、方差為1的正態分布的隨機數;K表示麻雀個體移動方向和步長控制參數,是取值為[-1,1]中的隨機數;fi為當前個體適應度值;fg、fw分別是當前全局最佳和最差適應度值;ε為最小常量,防止分母為零.
3.3 SSA辨識流程
基于麻雀搜索算法的早期故障參數辨識流程圖如圖5所示.
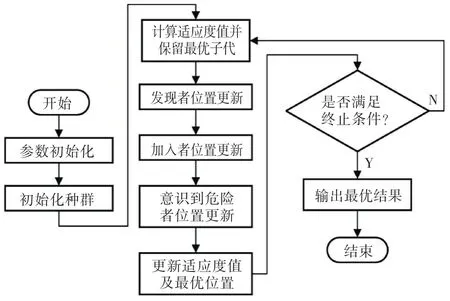
圖5 SSA尋優流程圖
SSA-BG模型參數辨識過程步驟如下:
1)設定參數維度、迭代次數、種群規模、發現者數量、安全閾值;
2)在搜索空間內隨機初始化種群并計算適應度值,保留當前最優個體;
3)按照式(8)~(10)更新相應位置,比較適應度值并存儲每一代最優值;
4)更新整個種群所經歷的最優位置和適應度值.
4 實驗分析驗證
4.1 實驗介紹
實驗以20-sim和Matlab軟件工具為實驗平臺,在20-sim平臺搭建逆變器系統HBG模型,通過在圖3的標定位置分別放置勢傳感器、流傳感器,并將采集的開關信號導出數據至Matlab工作區,由SSA對目標函數進行尋優處理.
以T型逆變器A相為例進行說明,分別設定故障參數即為目標參數:θia={Ron1,Ron2,Ron3,Ron4}.實驗將目標參數設定為1.00,開關頻率為20 k Hz,采樣頻率為100 k Hz,麻雀種群規模為800,最大迭代次數為300,安全閾值為0.8,發現者比例為0.2.
只要辨識算法能夠在終止條件之前使目標函數收斂并找到對應的目標參數θia,通過誤差分析能滿足可接受條件即為辨識成功.
4.2 辨識結果及分析
實驗采集5 680組數據,共做10組實驗,根據圖5所示流程進行實驗驗證.由SSA優化目標函數所得適應度曲線結果如圖6所示,終止代數為300.
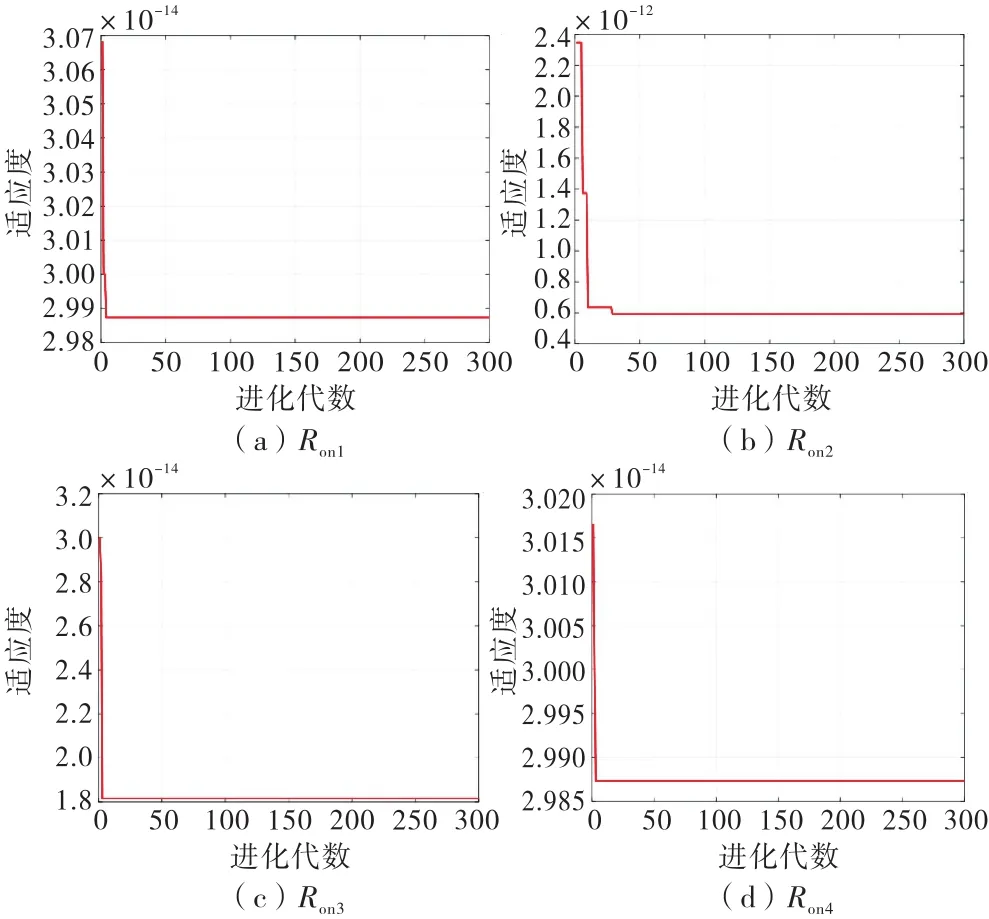
圖6 目標函數適應度曲線圖
通過SSA對模型參數進行辨識后取均值以避免單次辨識結果出現較大誤差的情況,得出系統退化參數辨識結果,見表4.
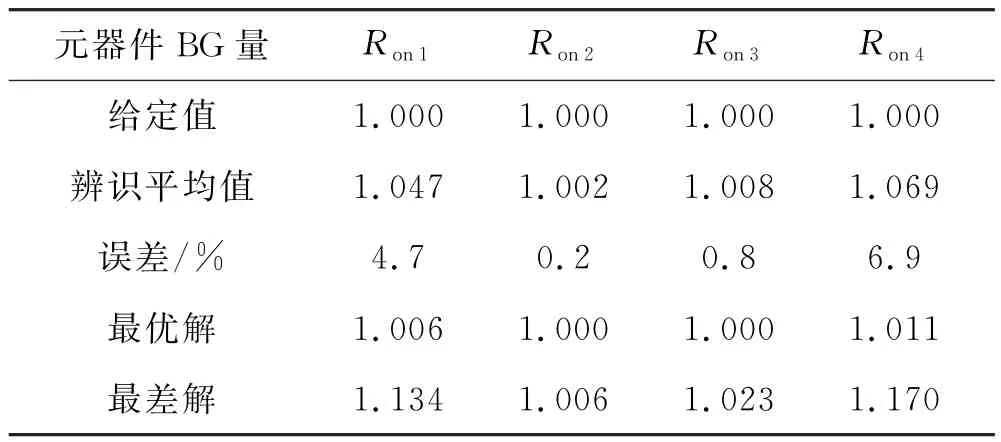
表4 目標參數辨識結果
由表4可見,辨識結果誤差最大值不超過6.9%,最小誤差為0.2%.表明了基于BG理論結合SSA辨識故障參數的有效性.
5 結 論
本文以電氣系統中的混雜電路:三電平T型并網逆變器為研究對象,將系統IGBT參數退化視為故障因子,建立了系統HBG模型,推導出了系統的GARRs,并將系統故障參數的辨識問題轉化為對目標函數的優化問題,采用SSA尋優算法完成了系統退化參數的辨識.通過聯合仿真實驗驗證了該方法的有效性和可行性,為混雜電路的參數辨識提供了思路,即基于BG理論對系統進行HBG建模,推導GARRs并結合相關算法對故障參數進行辨識分析,以獲取系統當前的退化狀態,為系統的視情維護提供依據.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
汽車維護與修理(2016年10期)2016-07-10 08:17:41
