基于雙向線性插值的車道輔助系統(tǒng)障礙避讓研究
2022-06-13 11:12:49覃振杰熊鐸程林智桂覃高峰廖尉華
中國信息化 2022年5期
覃振杰 熊鐸程 林智桂 覃高峰 廖尉華
車道保持輔助系統(tǒng)是應用在智能車輛上,為駕駛員提供輔助避免駛出車道的智能輔助系統(tǒng)。其設計一般有兩種,一是當車輛即將行駛出本車道時,對車輛提供轉(zhuǎn)向輔助使車輛回到本車道內(nèi);二是以車道中心線為車輛的期望行駛路徑,當車輛偏離車道中心線時控制車輛回到車道中心線上。一般車道保持輔助系統(tǒng)的設計都會同時采用兩種控制策略。
在使用攝像頭傳感器的解決方案中,主要利用對車道線與自車的相對距離與方向進行識別,計算出車道中心線作為車輛行駛的期望行駛路徑。這一行駛策略并不能在所有的駕駛場景上帶來良好的駕乘體驗。例如,智能車輛在行駛中發(fā)生會車時,駕駛員往往會偏離駕駛,僅行駛在車道中心線并不能實現(xiàn)這一功能。為了模擬這一駕駛策略,本文基于單攝像頭的傳感器解決方案,提出了使用攝像頭可提供的信息,在滿足避讓要求下,將車道中心線進行偏置后作為期望行駛路徑的局部路徑規(guī)劃方法,以實現(xiàn)智能車輛的避讓效果。
(一)雙向線性插值
雙線性插值實際上是進行了兩個方向的單向線性插值計算,其主要算法是利用與待插值點臨近的四個點所對應的值進行加權(quán)平均,求出待插值點的對應的值。
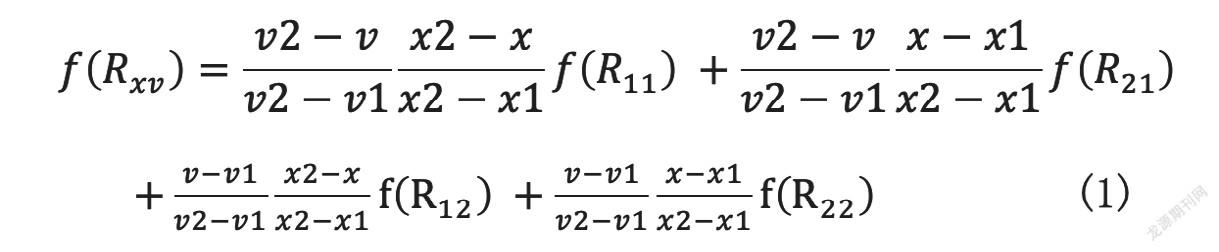
本文算法中偏置量的計算將自車與避讓車輛的縱向距離x、自車車速v構(gòu)成插值點Rxv,f(Rxv)表示偏置量。使用公式一可快速計算出四個預設點范圍內(nèi)任意點所對應的偏置量。
(二)偏置避讓在線算法介紹
在線算法計算偏置量流程為:
1.功能是否開啟,若關(guān)閉本次運行周期不進行偏置計算。
2.左右車輛是否滿足偏置xstar距離要求。
兩側(cè)車道上大型車輛距離大于偏置距離時(根據(jù)實際情況進行設定,若沒有車輛認為車距大于偏置距離),進行偏置量1的計算。
計算偏置量1
偏置量1是車輛偏離道路邊緣的橫向距離,根據(jù)當前自車縱向車速進行單向線性插值計算偏置量1。車速與偏置量成反比趨勢。將固定速度點對應的偏置量設置為標定值,通過改變標定值來調(diào)整其他速度偏置量。
3.單側(cè)是否有大車距離小于偏置距離
僅有單側(cè)車距小于xstar,車輛類型為避讓類型時,判斷偏置側(cè)是否為柵欄或道路邊緣,若是則取消偏置,否則計算偏置量2。例如,當逐漸駛近右側(cè)車道上的大型車輛,考慮期望路徑向左偏。若此時左側(cè)車道線類型為道路邊緣,或是右側(cè)車輛距離也小于安全距離,則退出偏置。
(1)偏置量2的計算
偏置量2為與大型車輛靠近時對其避讓的偏置距離。用O表示偏置量2,計算O的公式為:
O=|H|-R*M (2)
式中,M表示半車寬度,H為半車道寬度,R為偏置補償系數(shù)。根據(jù)當前自車縱向速度v與大車距離x,雙向線性插值計算出偏置補償系數(shù)R。
(2)保證偏置后車輛不會駛出本車道
將偏置量O限制在[0,(H-M-T)]的范圍之內(nèi)。其中,T為預設的偏離閾值,H-M-T計算結(jié)果為最大偏置量Omax。其中,偏執(zhí)量從0增加到Omax所需的時間限制為Toffset。
4.退出偏置
若偏置量的絕對值小于0.01,則將偏置量置為0。否則對偏置量梯度下降到0。梯度值由退出偏置時間Texit決定。
5.疊加偏置量。
將計算出的偏置量作用到期望路徑上。
為了驗證本文避讓算法的有效性和可行性,使用MATLAB軟件建立仿真環(huán)境,模擬車輛行駛過程中對大型車輛的偏置量計算結(jié)果。仿真環(huán)境下車道寬度設為3.5m,車輛寬度為2m。
(一)期望偏置行駛過程參數(shù)設置
當自車與大型車輛之間的距離小于開始偏置距離,開始計算偏置量,并且在Toffset時間內(nèi)偏置量從0開始增加到最大偏置量Omax,并保持最大偏置量行駛,直到滿足退出偏置條件,退出偏置時間為Texit。在不同車速下,相關(guān)參數(shù)設定如表1所示。

根據(jù)表1,我們由預設最大偏置量計算出對應預設速度與距離點所對應的偏置補償系數(shù)R作為已知插值點的值,用于計算其他情況下的偏置補償系數(shù)R,如表2所示。
(二)根據(jù)預設參數(shù)進行偏置量計算
假設1,自車對右側(cè)相鄰車道上避讓車輛進行超車,自車速度逐漸增加到80km/h且均大于避讓車輛,周圍環(huán)境滿足避讓要求。根據(jù)設定的補償系數(shù),對以下幾種車速和距離進行偏置量的仿真計算。若車距為70m,自車車速為65km/h時,理想偏置量為0.08;若距離為35m,自車車速增加到80km/h,則偏置量為0.32m;此后車輛保持80 km/h的速度或更快車速進行超車,當距離越來越小時,偏置量插值計算結(jié)果均為0.32m,直到超越目標避讓車輛。上述車輛運動過程中期望路徑的偏置變化仿真結(jié)果如圖1所示。
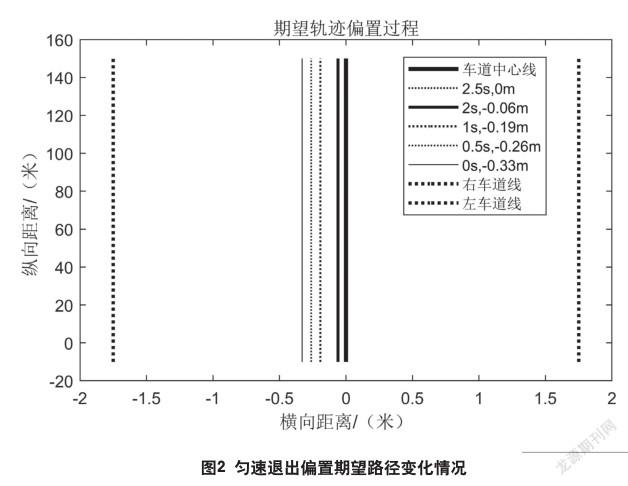
假設2,車輛以70km/h的速度勻速駛離右側(cè)相鄰車道上目標避讓車輛,由表1可知,完成退出偏置時間為2.4s,由表2插值計算出70km/h的最大偏置距離為0.33m,則開始退出偏置時期望路徑已經(jīng)相對于車道中心線向左偏置了0.33m,偏置量周期衰減梯度值為0.00275m。如圖2所示,計算了退出偏置時幾個時間點下偏置量的衰減結(jié)果,表示期望路徑由偏置逐漸回歸到車道中心線上的變化情況。

為增加車道輔助系統(tǒng)中智能車輛的避讓性,在一定場景下提高系統(tǒng)的智能性與駕乘舒適性,本文提出了根據(jù)自車速度與目標避讓車輛距離進行雙向線性插值計算偏置量的方法,根據(jù)預期避讓行駛效果,決定避讓算法的相關(guān)參數(shù),從而計算出預設車速與距離對應的偏置補償值,作為計算所有偏置量的依據(jù)。將預設車速、距離及其偏置補償值設定為標定量,在實車調(diào)試時可根據(jù)車輛實際行駛表現(xiàn)快速進行修改,達到不同的避讓效果,具有計算簡便,調(diào)試靈活,實用性強的特點,可以很好增加車道輔助系統(tǒng)的避讓性。
作者單位:上汽通用五菱汽車股份有限公司