神經網絡融合引力場的超寬帶定位模型
2022-06-15 04:46:58王安義
西安科技大學學報 2022年3期
王安義,曹 茜
(西安科技大學 通信與信息工程學院,陜西 西安 710054)
0 引 言
智能家居、煤礦井下、消防救援等場景都需要獲得高精度的室內定位信息,超寬帶(ultra wide band,UWB)技術因具有分辨率高、抗多徑效應、穿透性強、硬件結構簡單、頻譜利用率高等優點成為室內定位首選。
復雜的室內環境存在人員、墻體以及其他障礙物,給定位系統帶來不可避免的非視距(non-line of sight,NLOS)誤差和多徑干擾,因此如何降低或消除NLOS誤差成為UWB室內定位研究的熱點[1]。UWB定位中基于測距常用的算法有基于信號到達強度(RSSI)、到達角度(AOA)、到達時間(TOA)和到達時間差(TDOA)等方法[2]。TDOA方法因其時鐘同步要求低、設備簡單、定位精度較高而被廣泛研究。為降低NLOS誤差和提高定位精度,反向傳播算法[3](back propagation,BP)、卷積神經網絡[4](convolutional neural networks,CNN)、遺傳算法(genetic algorithm,GA)[5]、粒子群算法(particle swarm optimization,PSO)[6]等智能算法被應用到無線定位領域。Poulose Alwin等提出一種在視距(line of sight,LOS)環境下基于長短期記憶網絡(long short-termmemory,LSTM)的超寬帶定位方法,平均定位誤差為7 cm[7]。王生亮等通過改進的實數自適應遺傳算法優化TDOA定位算法,提高UWB信號在復雜環境下的定位精度[8]。崔麗珍等提出一種基于PSO-BP神經網絡的定位算法,利用PSO算法對BP神經網絡各個神經元之間的權值進行尋優,實現定位性能的提升[9]。NGUYEN等在定位過程中,將典型的測距和定位階段整合在一起,同時由所提出的CNN模型進行定位,其定位性能的提升是通過增加計算復雜度為代價實現的[10]。MEGHANI等利用模糊模型通過NLOS誤差和多路徑(multipath propagation,MPP)傳播條件引起的不確定性對測距誤差進行估計和校正,能有效地減小測距誤差和計算量[11]。陳浩等提出一種基于井下隧道不同環境的聯合定位算法,在LOS情況下使用訓練好的BP神經網絡算法來提高作業效率和定位精度,而在NLOS情況下改用粒子過濾,在所有環境下的定位效率顯著提高[12]。
為有效緩解NLOS誤差和提高定位精度,以BP神經網絡超寬帶定位模型為基礎,針對BP神經網絡用于超寬帶定位時,存在收斂速度慢、易陷入局部極值等問題,提出一種BP神經網絡融合引力場的超寬帶定位模型。模型利用仿真數據構建BP神經網絡,通過引力場算法優化BP神經網絡的初始權值和閾值,實現目標精準定位。
1 室內定位模型
1.1 到達時間差定位模型
到達時間差定位模型通過測量出2個不同基站與移動目標之間的到達時間差值,解算得到目標位置。設目標MS位置坐標為(x,y),基站BSi坐標為(xi,yi),將BS1視為主基站,目標MS與基站BSi之間的距離見式(1)
ri,1=cτi,1=c(τi-τ1)
(1)
式中ri,1為MS到BSi和BS1之間的距離差;τi,1為MS到BSi和BS1間信號傳播的時間差,同時τi之間相互獨立;c為電波傳播速度,近似于光速。
由于ri,1=ri-r1,公式(1)可改寫為
(2)

實際環境中非視距傳播和多徑效應,引入非視距誤差和系統誤差,造成測量值不準確,定位精度下降的問題。
1.2 BP神經網絡超寬帶定位模型
BP神經網絡可通過學習數據來解決非線性問題,包括信號的正向傳播和誤差的反向修正2個過程。利用BP神經網絡較強的非線性逼近能力來緩解NLOS誤差,以提高定位性能。
BP神經網絡超寬帶定位模型中BP神經網絡拓撲結構(圖1),輸入層由參與定位的8個基站提供的7個TDOA測量值組成,輸出層為MS的估計位置(x,y)。
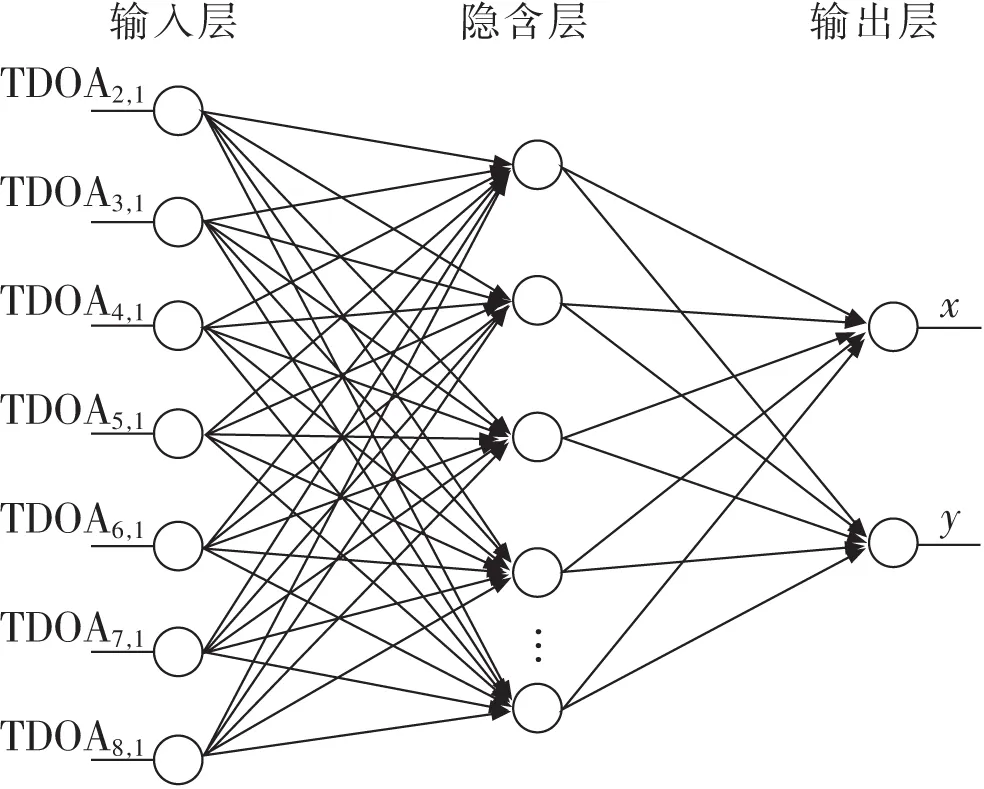
圖1 BP神經網絡拓撲結構Fig.1 BP neural network topology
針對定位問題完成BP神經網絡構建后,初始化BP神經網絡參數。輸入信息通過神經元激活函數、權重及閾值前向傳遞至輸出層。判斷輸出信息與期望信息的誤差是否滿足需求,或迭代次數否達到上限。滿足上述任意結束條件,訓練結束,否則反向傳遞輸出層誤差,以降低誤差為目標利用最速下降法更新權重與閾值。
1.3 引力場算法
引力場算法(gravitation field algorithm,GFA)[13]是鄭明等提出的一種新穎的啟發式搜索算法,廣泛應用于生物工程、算法優化、復雜網絡和粒子濾波領域[14-19]。算法模仿灰塵在宇宙中相互吸引匯集,形成行星的變化過程,可作為優化問題的最優解[20]。
灰塵初始化。在質量函數的自變量范圍內隨機初始化N個灰塵粒子,作為優化問題的初始解空間。在可行域內利用質量函數F,即可求得每個灰塵粒子的初始質量M。灰塵的質量值是衡量灰塵優劣的重要指標,令灰塵質量值最小的灰塵為中心灰塵,其余灰塵稱為周圍灰塵。
移動算子。不同于實際物理模型中灰塵之間相向的引力作用,引力場算法在當前移動算子迭代步驟內中心灰塵不會移動,其他周圍灰塵會朝著中心灰塵單向移動,移動策略見式(3)
Pi=M×disi
(3)
式中disi為中心灰塵和周圍灰塵之間的歐氏距離;M為移動距離的權重值。
吸收算子。周圍灰塵受中心灰塵單向引力作用向其靠近,當周圍灰塵與中心灰塵之間的距離小于一定的閾值時,周圍灰塵被中心灰塵吸收。吸收策略為刪除相應的周圍灰塵,減少下一次迭代過程中冗余的計算。
自轉算子。周圍灰塵不僅受到中心灰塵的引力作用,同時受到中心灰塵自轉的影響。自轉操作是中心灰塵通過自旋轉將周圍灰塵推離,使兩者始終保持一定距離的過程,推離策略見式(4)
(4)
式中f為自轉因子,與中心灰塵和周圍灰塵之間距離成反比例關系。為避免周圍灰塵被推離太遠,設置一個最大自轉因子fmax,保證算法的收斂速度。
2 超寬帶定位模型
2.1 超寬帶定位原理
引力場算法具有收斂速度快、全局尋優能力強的特點,模型中的引力作用使優化對象快速集中地分布在真實狀態附近,自轉作用使優化對象避免過度集中。為緩解BP神經網絡超寬帶定位模型,容易陷入局部最優、收斂速度慢等缺點,提出一種BP神經網絡融合引力場的超寬帶定位模型(圖2)。
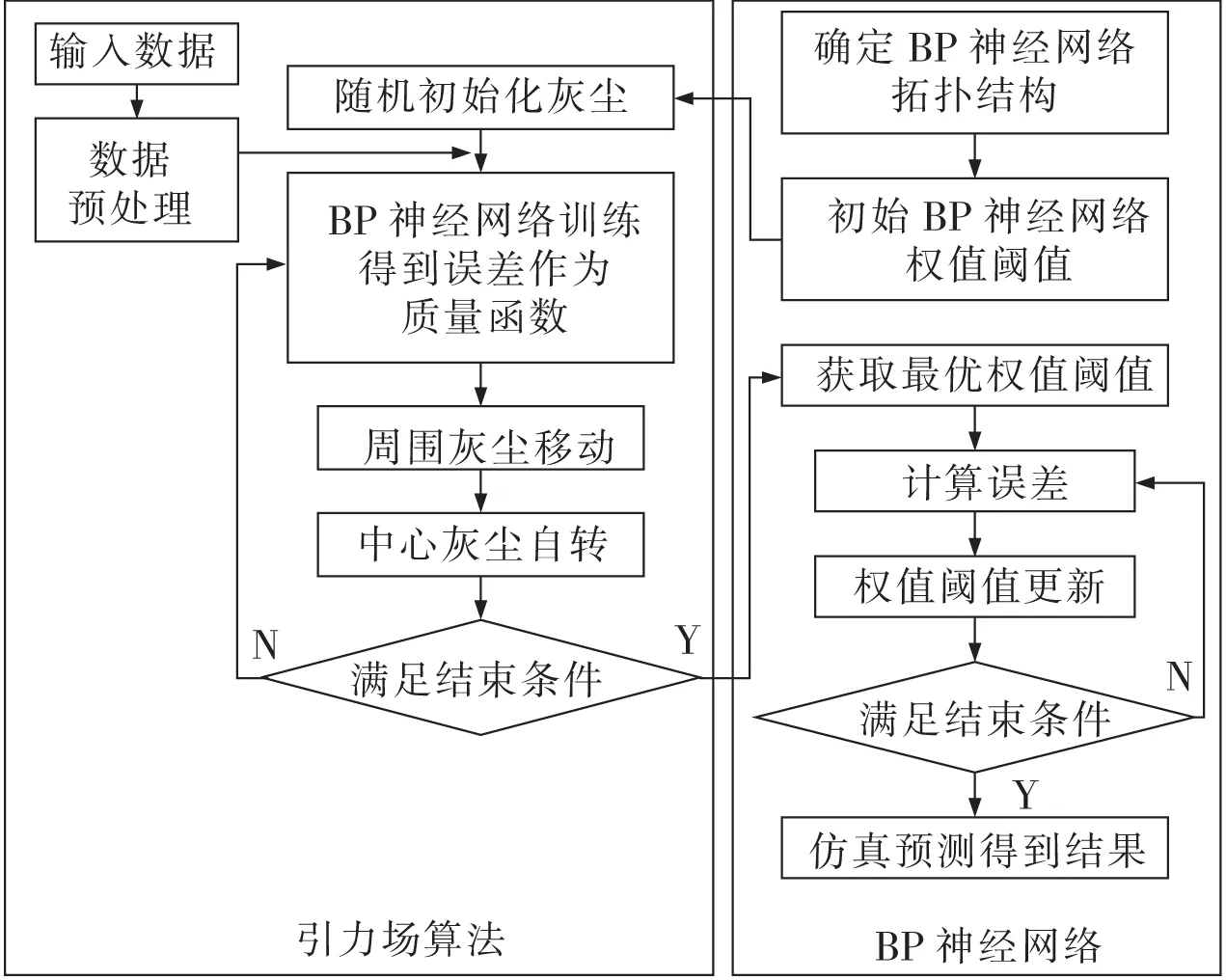
圖2 BP神經網絡融合引力場的超寬帶定位模型Fig.2 BP neural network fusion gravitational field algorithm for ultra-wideband localization model
BP神經網絡融合引力場的超寬帶定位模型,主要分為BP神經網絡構建和引力場算法優化BP神經網絡模型。BP神經網絡結構由數據集的輸入輸出參數個數確定;引力場算法優化BP神經網絡模型利用引力場算法優化BP神經網絡的初始權值和閾值,具體優化過程為:引力場算法每粒灰塵中包含一個網絡所有權值和閾值,利用質量函數計算灰塵的質量值,通過迭代灰塵間的移動、排斥操作找到較小質量值對應的灰塵,得到引力場算法優化BP神經網絡的較優初始權值和閾值,通過LM算法更新權值和閾值訓練網絡。網絡預測將測試數據集輸入訓練好的神經網絡模型,輸出預測目標的定位坐標。
2.2 超寬帶定位過程
初始化網絡參數。確定BP神經網絡結構,初始化BP神經網絡權值ωij,ωjk和閾值a,b,同時將權值和閾值映射為引力場算法中的每粒灰塵。
確定灰塵質量。將預測輸出和期望輸出之間的誤差絕對值和作為灰塵的質量。質量函數的表達見式(5)
(5)
式中n為網絡輸出節點;yi為BP神經網絡第i個節點的期望輸出;oi為第i個節點的預測輸出。將質量小的灰塵定義為中心灰塵,其余灰塵為周圍灰塵。
周圍灰塵移動。周圍灰塵受到中心灰塵的單向引力作用,發生移動。判斷移動因子是否起作用,當周圍灰塵與中心灰塵之間的距離小于0.5時,移動因子失效;否則,利用公式(3)計算周圍灰塵受中心灰塵引力的作用。
中心灰塵自轉。中心灰塵通過自轉作用,與周圍灰塵始終保持一定距離。判斷自轉因子是否起作用,當周圍灰塵與中心灰塵之間的距離大于0.2時,自轉因子失效;否則,利用公式(4)計算周圍灰塵受中心灰塵排斥力的作用。
判斷是否結束。檢查引力場算法迭代次數是否達到最大迭代次數,若不滿足條件,返回確定灰塵質量步驟,直至滿足條件,從而獲得引力場優化BP神經網絡的較優初始權值和閾值。
實驗驗證。利用測試數據集,仿真驗證BP神經網絡融合引力場的超寬帶定位模型的性能。
3 結果與分析
3.1 仿真環境與參數設置
采用MATLAB模擬室內NLOS環境下UWB定位,基站數量的增加可以提升定位精度。因此,選擇在20 m×20 m的二維平面區域內設置8個基站BSi,1(i=1,2,…,8),分布位置分別為BS1(0,0),BS2(0,10),BS3(0,20),BS4(10,20),BS5(20,20),BS6(20,10),BS7(20,0),BS8(10,0),BS1為主基站。UWB信道模型選擇IEEE802.15.4a標準下的CM4模型(NLOS環境下的室內辦公環境)。目標MS發射的UWB信號源為PPM-TH-UWB調制模式。UWB信號經過與信道沖激響應卷積之后再加入白噪聲,最后在輸出端通過相關器接收,從而得到TDOAi,1(i=1,2,…,8)數據(圖3)。
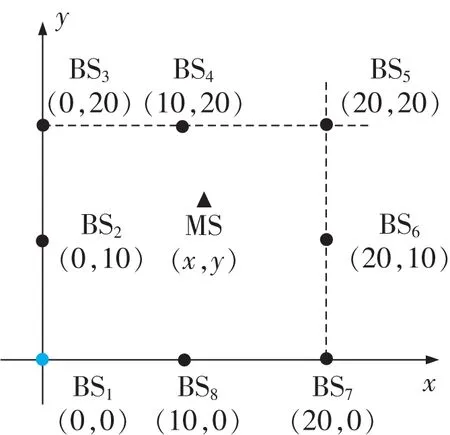
圖3 仿真環境布局Fig.3 Simulation environment layout
為檢驗各定位模型的性能,根據仿真環境隨機生成1 000組MS真實坐標(x,y),計算對應的TDOAi,1(i=1,2,…,8)數據,其中800組數據用于訓練引力場算法優化BP神經網絡模型,以目標MS的真實坐標(x,y)為目標樣本矢量對網絡進行訓練;200組數據用于驗證BP神經網絡融合引力場算法的超寬帶定位模型的性能。
BP神經網絡定位模型輸入節點數為7,輸出節點數為2,根據經驗公式多次進行實驗,確定隱含層神經元個數l為11,隱含層激勵函數f1為logsig函數,輸出層激勵函數f2為pureline函數,最大迭代次數為100,期望誤差為0.000 01,學習速率為0.01。
粒子群優化BP神經網絡超寬帶(PSO-BP)定位模型參數設置如下:認知系數c1=1.5,社會學習系數c2=1.495,種群規模N=40,最大迭代次數D=100,其余參數同BP神經網絡定位模型設置相同。
BP神經網絡融合引力場超寬帶(GFA-BP)定位模型參數設置如下:利用LM算法更新權值和閾值,移動距離的權重值M=0.061 8,自轉因子f=0.008 25,最大自轉因子fmax=0.3,初始種群N=40,最大迭代次數D=100,其余參數同BP神經網絡定位模型設置相同。
3.2 實驗結果與性能分析
將200組TDOA值輸入GFA-BP定位模型、PSO-BP定位模型和BP神經網絡定位模型,得到各模型預測的MS坐標。隨機選取測試集中50組預測誤差進行對比(圖4),NLOS仿真環境下GFA-BP模型定位精確度優于PSO-BP定位模型和BP神經網絡定位模型,且魯棒性較好。
表1為3種定位模型的最大誤差、最小誤差和均方根誤差(root mean square error,RMSE),GFA-BP定位模型的均方根誤差為7.95 cm,相較于PSO-BP定位模型的17.21 cm和BP神經網絡定位模型的22.34 cm,分析知定位誤差分別下降了53.81%和64.41%。在以上3種不同定位模型中,GFA-BP模型定位精度較高。

圖4 3種定位模型預測誤差絕對值比較Fig.4 Comparison of absolute value of prediction error of three positioning models
引力場定位模型中“適應度”對應引力場算法質量值,為衡量網絡性能的參數。PSO-BP定位模型第26次迭代時趨于穩定,GFA-BP定位模型第12次迭代時趨于穩定,說明引力場算法優化BP神經網絡模型收斂速度更快,尋優能力更強。PSO-BP定位模型最優個體適應度值0.248 6,GFA-BP定位模型最優個體適應度值為0.196 7。適應度值越低,相應的權值與閾值越優,定位模型預測誤差越小。結合各模型的網絡收斂速度和網絡收斂穩定時適應度值可知,GFA-BP定位模型在保持較快尋優速度、BP神經網絡優化能力強于PSO-BP網絡(圖5)。
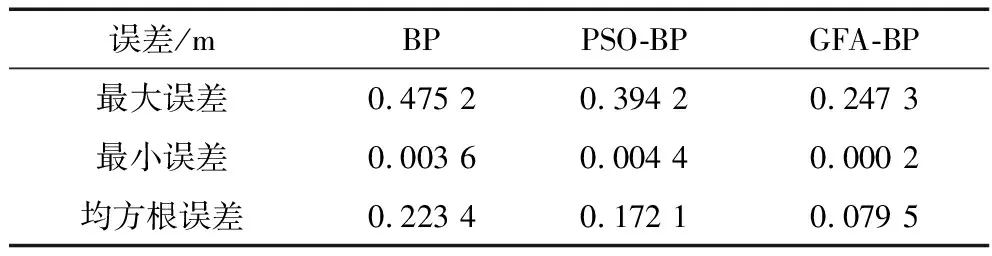
表1 3種定位模型的定位誤差
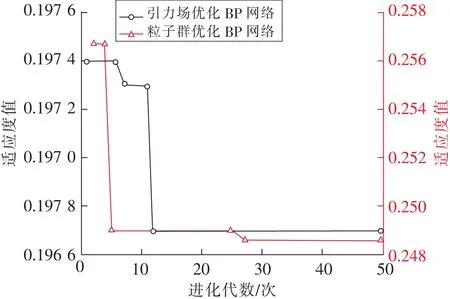
圖5 引力場與粒子群優化BP網絡性能比較Fig.5 Performance comparison of gravitational field and particle swarm optimization BP network
通過PSO-BP神經網絡訓練誤差可知,PSO-BP神經網絡需30步達到目標精度,網絡均方誤差為0.008 033 8,總運行時間為179.233 853 s(圖6)。
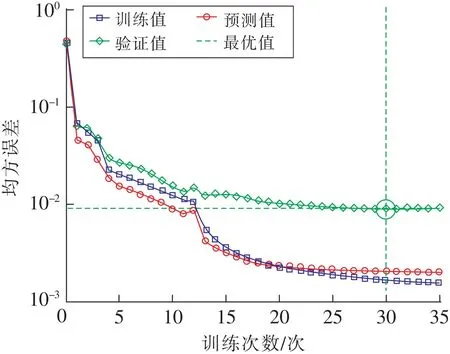
圖6 粒子群優化BP網絡訓練誤差Fig.6 PSO-BP network training error
通過GFA-BP神經網絡訓練誤差可知GFA-BP神經網絡僅需19步達到目標精度,網絡均方誤差為0.003 284 6,總運行時間為99.817 086 s。GFA-BP神經網絡較PSO-BP神經網絡,能減少網絡的收斂次數加快網絡訓練時間,降低了總體誤差,更好地改善BP神經網絡易陷入局部極值和收斂速度慢的缺點(圖7)。
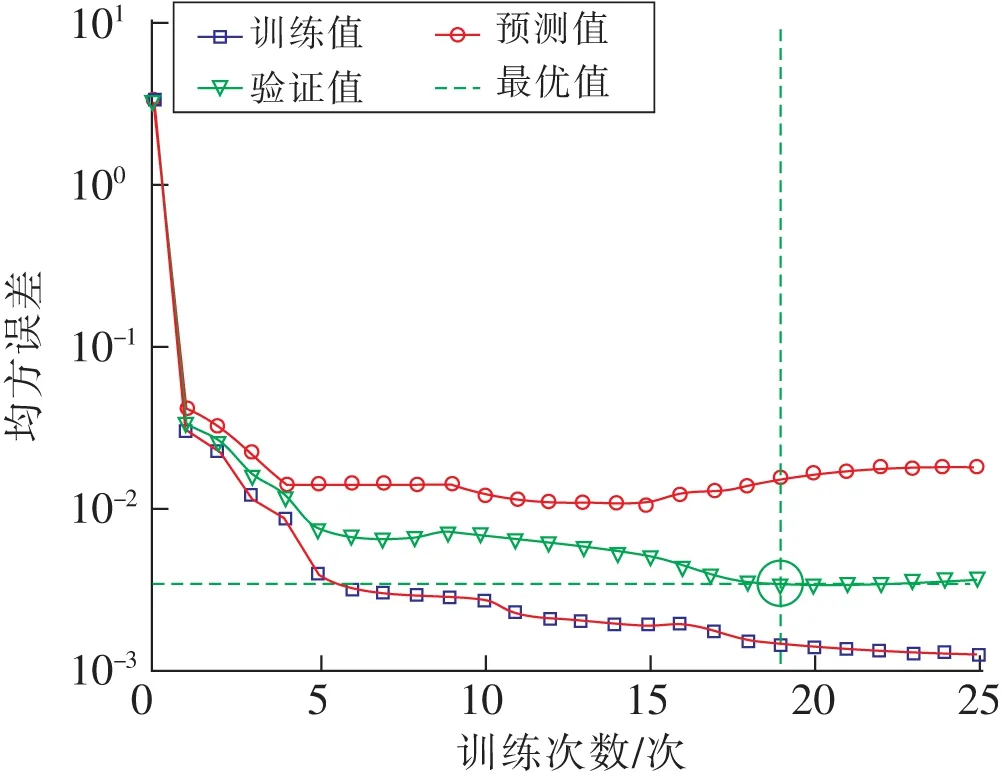
圖7 引力場優化BP網絡訓練誤差Fig.7 GFA-BP network training error
累積分布函數(cumulative distribution function,CDF)表示在所有定位結果中,誤差低某設定誤差的概率。通過3種模型定位誤差累計分布函數可知,90%定位誤差控制在12.75 cm以內,較粒子群優化BP網絡定位精度提升50.92%,較BP神經網絡超寬帶定位精度提升64.55%(圖8)。GFA-BP算法曲線較PSO-BP算法曲線和BP算法曲線收斂速度較快,定位誤差較小,定位效果較好。
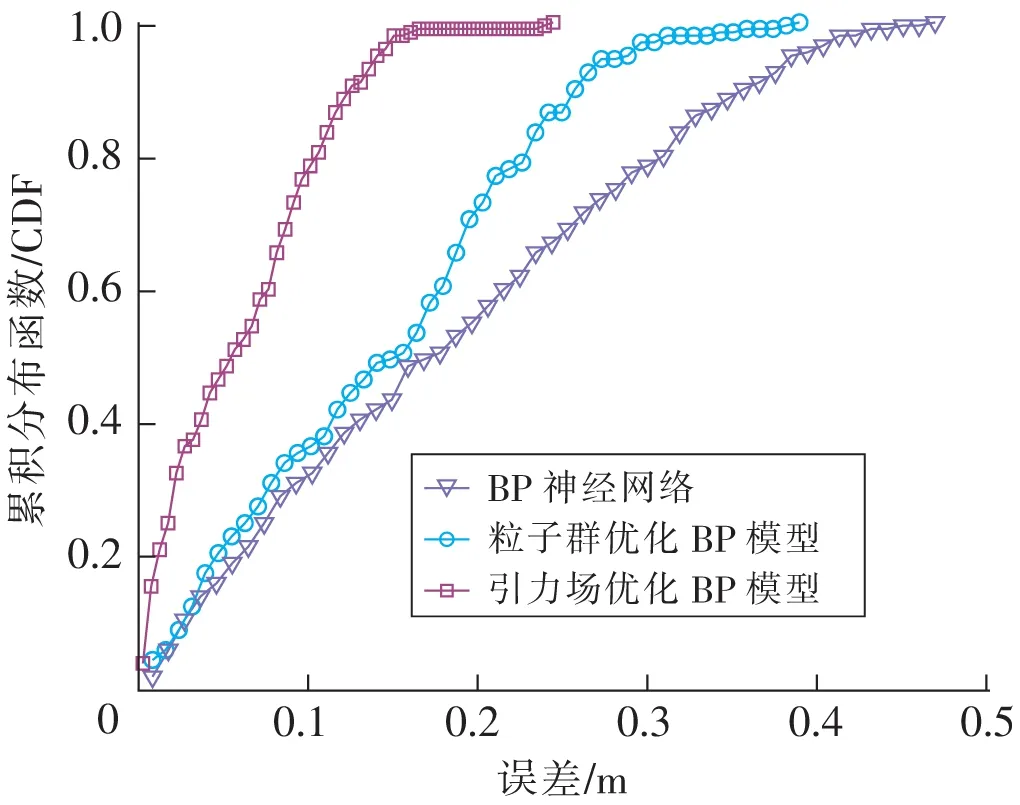
圖8 3種定位模型誤差累積分布函數Fig.8 Error cumulative distribution functions of three positioning models
4 結 論
1)定位模型利用BP神經網絡較強的非線性逼近能力,解決非視距誤差、多徑效應導致超寬帶定位模型精度下降的問題。
2)移動因子使權值和閾值快速集中分布在極值附近,提升網絡收斂速度;自轉因子臨近極值的權值和閾值隨機遠離極值,保證灰塵的多樣性,緩解BP神經網絡超寬帶定位模型收斂速度慢、容易陷入局部極值的問題。
3)GFA-BP超寬帶定位模型在NLOS環境下具較高定位精度、較快收斂速度和良好魯棒性,滿足復雜環境下室內定位的需求。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03