基于云平臺的冷鏈物流風險變化態勢跟蹤研究*
2022-06-16 12:45:46閆明陳戀
計算機與數字工程 2022年5期
閆 明 陳 戀
(中國社會科學院 北京 102442)
1 引言
冷鏈物流屬于一種冷凍工藝,利用人工制冷方法實現生產與運輸的運作,其作用是確保物品質量不變質,降低經濟損耗[1~3],為易壞物品生產與運輸提供一個完美的供應鏈。冷鏈物流的風險主要體現在物品運輸不及時導致其發生變質,直接影響消費者的身體健康,降低企業核心競爭力[4]。精準跟蹤冷鏈物流風險,會大大減少冷鏈的安全風險,確保冷鏈物品的安全供應,減少企業的安全成本,促進冷鏈物流企業健康長遠發展[5]。研究冷鏈物流跟蹤方法還會實現物品的全面監控,精準定位物品出現風險問題后的相關責任人,及時找出導致風險的原因,制定相關方案,避免類似風險事件發生[6]。云平臺能夠同時硬件與軟件資源,具備強大的數據處理與存儲等功能,具備可擴展性、數據移動性、安全性高與成本低等優點,適用于各個領域。因此,研究基于云平臺的冷鏈物流風險變化態勢跟蹤方法,精準跟蹤物流軌跡,實時獲取風險變化態勢,確保冷鏈物流的安全性。
2 基于云平臺的冷鏈物流風險變化態勢跟蹤
2.1 總體框架
云平臺的冷鏈物流風險變化態勢跟蹤方法的總體框架如圖1 所示。該方法的主要目標是冷鏈物流風險變化態勢跟蹤,將物品冷鏈需求特征當成核心數據,在硬件設備內存儲冷鏈基礎數據;在各個冷鏈環節中安裝無線傳感器即監控終端,實現跟蹤信號的實時感知;利用基于壓縮感知的數據傳輸方法完成跟蹤信號的傳輸;采用數據互聯算法依據跟蹤信號更新目標狀態,通過卡爾曼濾波算法過濾信號,求解目標三維坐標,通過匹配三維坐標與電子地圖中數據庫信息特征,獲取目標活動軌跡,查看目標是否遵循設定物流軌跡,完成風險變化態勢跟蹤;針對偏離設定物流軌跡的目標展開異常報警[7],利于相關人員及時處理異常情況,解除風險。

圖1 總體框架
2.2 基于壓縮感知的實時感知數據傳輸方法
塑造稀疏采樣模型完成實時感知的傳感信息的壓縮采樣與傳輸,數據壓縮傳輸流程如圖2 所示。冷鏈物流利用無線通訊網絡交互無線傳感器和監控終端間的信息,小波變換可以較好地完成傳感數據的稀疏表示。冷鏈運輸車內傳感器節點獲取監控終端輸送的控制指令后[8],開始采集信息并上傳至智能處理單元,利用監控終端壓縮信息后利用GPRS 遠程傳輸到監控終端,監控終端利用重構算法實現信息的精準重構。
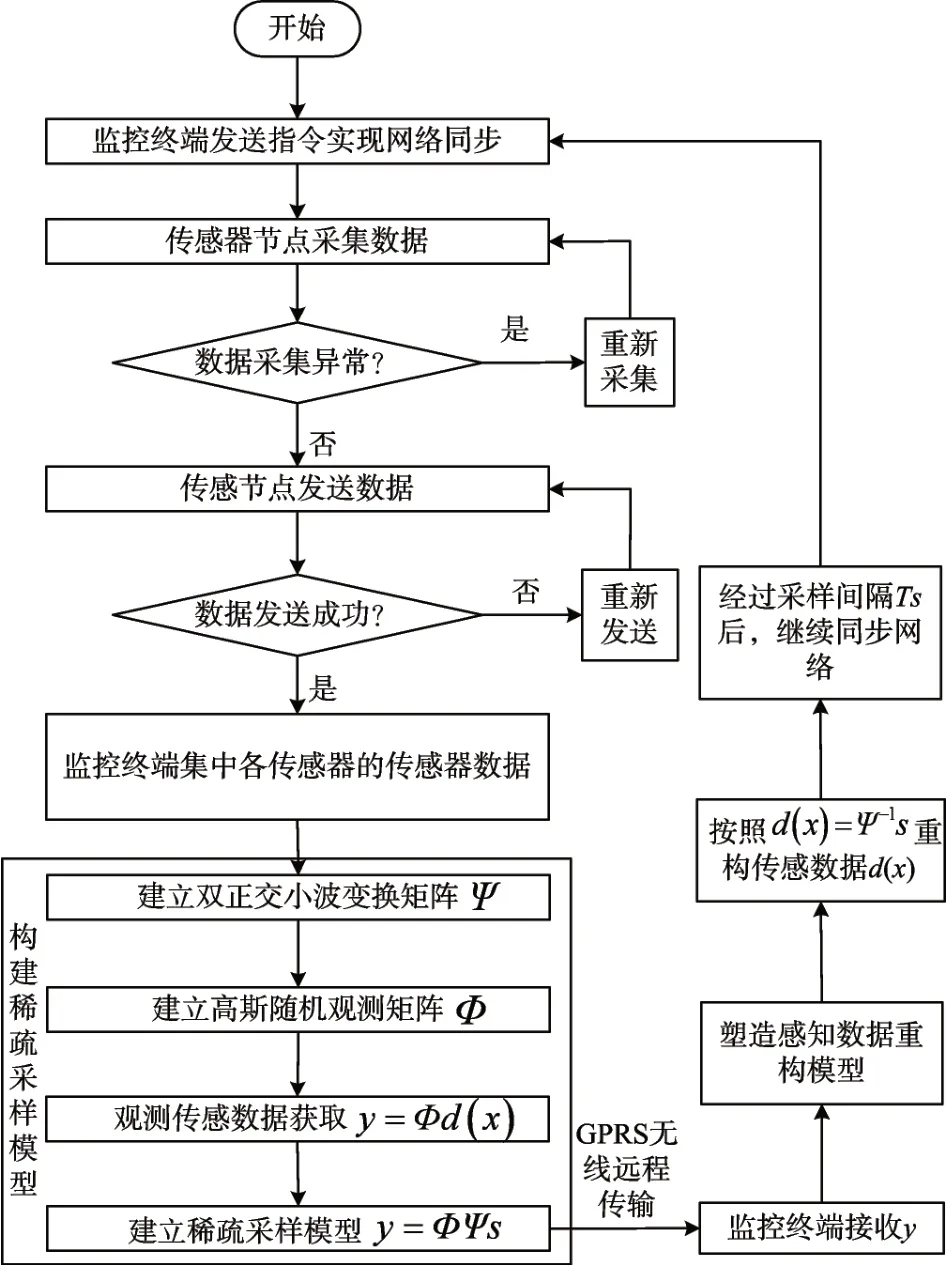
圖2 數據壓縮傳輸流程
令無線傳感器采集的x 時刻N 維距離信號是d(x)∈RN,也是基站Ψ下的K-稀疏信號,其中一維離散信號的列向量是RN,稀疏變換d(x)的公式如式(1)。

求解d(x)和各觀測向量內積獲取對應的觀測值,公式如下:

其中,測量矩陣是Θ,Θ=ΦΨ,Ψ和Θ盡可能無任 何 關 聯 ;M×N的 觀 測 矩 陣 是。
精準重構d(x)的公式如下:

其中,d(x)的0-范數是l0;通過l0的優化問題計算d(x)的近似值,其中,重構獲取的優化稀疏系數是s^ 。
信息重構步驟如下。
步驟1:初始化,令集合I 是空集,保存已選擇的恢復矩陣基的下標,矩陣q 是空,其作用是存儲相應的基向量,殘差r=y,s 的初始值是0,恢復矩陣T=ΦΨ,迭代次數n=0;
步驟2:選取基向量,在T 內選取和r 內積最大的基向量,令該向量的下標是i,那么:,設

其中,T 的列向量是ti;更新置T內相應的基向量是0;
步驟3:計算稀疏表示,通過已選取的基向量稀疏表示信號,計算系數向量
步驟5:在n的稀疏度已最大或者s符合重構誤差情況下,結束迭代;反之,轉至步驟2,繼續操作。
2.3 風險變化態勢跟蹤算法
冷鏈物流風險變化態勢跟蹤算法為互聯、過濾與跟蹤處理實時感知的d(x) ,獲取物流風險變化態勢軌跡[9~10]。具體步驟如下:
1)在數個位置信號d(x)內,獲取距離最小的d(x),即目標位置,其作用是更新目標狀態[11],公式如下:其中,更新前后的目標狀態分別是;常數是S。

利用聯合概率數據互聯算法實現數據互聯,令追蹤目標是j(j=1,2,…,mx),定 位 目 標 是,基本確認矩陣的公式如下:

其中,二進制變量是?ja,在j 陷入a 的確認矩陣中時,?ja=1,反之,?ja=0。
j和a的互聯概率如下:


其中,1 用于描繪j 在這個位置中,否則,j 不在這個位置中。
2)信息過濾,利用卡爾曼濾波算法過濾監控終端信息,求解目標的三維坐標[12],該算法的模型如下:

其中,狀態矢量是Wx;狀態轉移矩陣是Fx x-1;檢測矢量是Vx;干擾噪聲是Ux-1;控制矩陣是Lx-1;檢測矩陣是Hx;檢測的噪聲是Cx。
在整周模糊度是常數情況下的矩陣向量,利用常數模型計算目標的三維坐標,節約計算時間[13],預估計值的計算公式如下:
求解卡爾曼增益矩陣,公式如下:

其中,互聯概率是Px x-1;Cx的方差矩陣是Yx。

遞推初值,公式如下:

其中,偏導是E。
3)目標跟蹤,該過程就是跟蹤目標的實時位置信息,即冷鏈運輸車的實時位置,匹配監控終端接收的信息和電子地圖中數據庫信息特征[14],以搜尋的方式,在地圖中匹配信息特征,獲取冷鏈運輸車的活動軌跡;在全部d(x)內的最優匹配是d(x)最小同時符合設置的距離閾值條件的位置,即目標位置,通過實時獲取最優目標位置,判斷其是否偏離設定運輸軌跡,完成冷鏈物流風險態勢跟蹤[15]。
3 仿真測試實驗
3.1 實驗環境
以某物流公司為實驗對象,該公司共有10 輛冷鏈運輸車,在該物流公司的冷庫中安裝6 個無線傳感器,在每輛冷鏈運輸車內各安裝一個無線傳感器,無線傳感器安裝情況如圖3所示。
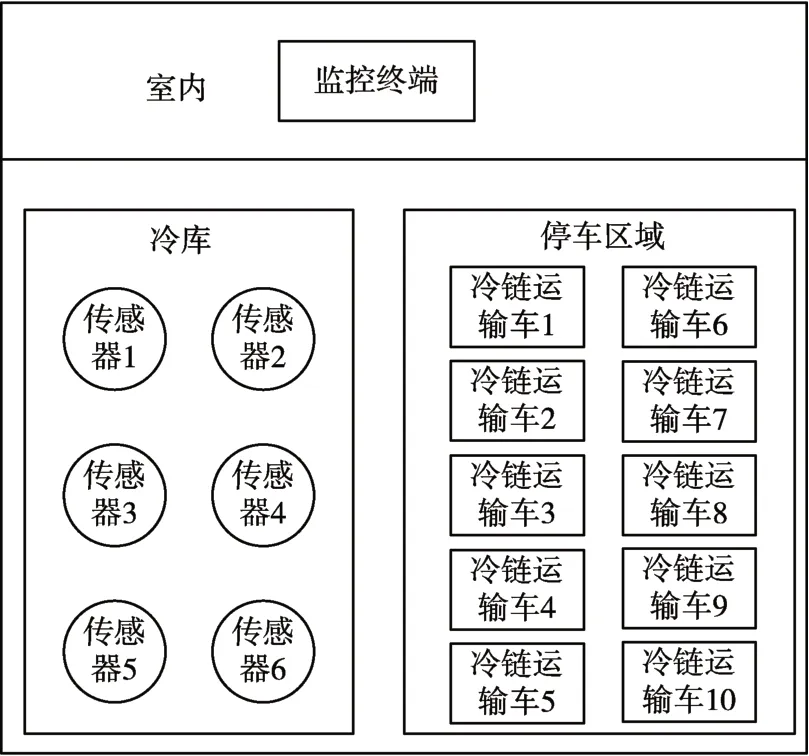
圖3 無線傳感器安裝情況
3.2 數據傳輸性能
隨機選取兩輛冷鏈運輸車,它們分別處于靜止狀態與行駛狀態,原始數據與重構數據對比結果如圖4 所示。由圖4 可知,在冷鏈運輸車處于靜止狀態時,本文方法重構的數據與原始數據完全相同,當冷鏈運輸車處于行駛狀態時,隨著時間的延長,運輸車的距離逐漸增加,本文方法重構的數據與原始數據存在一定的差距,但整體趨勢一致,僅有微小差別。實驗證明:本文方法具備較優的數據重構效果,為數據傳輸的精準性提供保障。

圖4 原始數據與重構數據對比結果
利用歸一化的均方誤差值(Normalized Mean Square Error,NMSE)評價數據傳輸效果,定義為

其中,數據重構前的第α個值是dα(n);數據重構后的值是;范數l的取值為2。
兩種狀態下,本文方法數據傳輸的NMSE 測試結果如表1所示。由表1可知,隨著時間的延長,在靜止狀態下,本文方法數據傳輸的NMSE 為0%;在行駛狀態下,NMSE 隨著時間的延長整體呈現上升趨勢,平均NMSE為1.44%,均方誤差較小。實驗證明:本文方法數據傳輸的均方誤差較小,說明其數據傳輸的精度較高,為后續跟蹤提供更為精準的數據支持,間接提升跟蹤效果。

表1 NMSE測試結果
3.3 跟蹤效果
隨機選取兩輛冷鏈運輸車,這兩輛冷鏈運輸車需要配送物品的距離不同,其中一輛距離較遠,另一輛距離較近,利用本文方法跟蹤兩輛運輸車的物流軌跡,物流軌跡跟蹤結果如圖5 與圖6 所示。綜合分析圖5 與圖6 可知,在跟蹤距離較短的運輸車物流軌跡過程中,本文方法獲取的跟蹤物流軌跡與設定的物流軌跡僅有微小差別,整體趨勢基本一致,說明本文方法能夠實時得到較近距離跟蹤目標的位置信息,該運輸車并未偏離設定的物流軌跡,代表其沒有發生任何風險;在跟蹤距離較遠的運輸車物流軌跡過程中,本文方法依舊能夠有效跟蹤物流軌跡,且與設定的物流軌跡存在較小的誤差,整體趨勢大致相同,說明本文方法能夠實時精準獲取較遠距離跟蹤目標的位置信息,該運輸車也沒有偏離設定物流軌跡,代表其也沒有發生任何風險。實驗證明:本文方法能夠精準獲取較近與較遠距離的冷鏈物流運輸軌跡,有效跟蹤風險變化態勢。

圖5 距離較短的運輸車物流軌跡

圖6 距離較遠的運輸車物流軌跡
為進一步驗證本文方法跟蹤風險變化態勢的有效性,隨機選取兩輛運輸車,按照相同的設定物流軌跡配送物品,但其中一輛運輸車并未按照設定物流軌跡行駛,利用本文方法跟蹤這兩輛運輸車的風險變化態勢,結果如圖7所示。由圖7可知,本文方法可有效跟蹤兩輛運輸車的物流軌跡,運輸車1的跟蹤軌跡與設定的物流軌跡基本一致,說明該運輸車不存在風險;運輸車2 的跟蹤軌跡已偏離設定物流軌跡,說明該運輸車存在風險,此時需要根據跟蹤結果發送異常報警信息,經由相關人員解決風險事件。實驗證明:本文方法可有效跟蹤偏離設定物流軌跡的運輸車物流軌跡,并根據物流軌跡完成風險變化態勢的跟蹤。

圖7 物流軌跡跟蹤效果
在不同天氣時,利用本文方法跟蹤10 輛運輸車的風險變化態勢,選取距離精度與跟蹤成功率作為定量分析指標,結果如圖8 與圖9 所示。由圖8可知,隨著距離閾值的增長,本文方法在不同天氣時跟蹤的距離精度均有所提升,在晴天時的距離精度最高,雨天與霧天環境較為惡劣,其距離精度略低于晴天,當距離閾值達到30 時,三種天氣時的距離精度均趨于穩定,即使在雨天與霧天這樣的惡劣天氣時,本文方法跟蹤的距離精度很高。由圖9 可知,在晴天時的成功跟蹤率整體高于雨天以及霧天,因惡劣環境影響,導致雨天與霧天的平均成功率低于晴天,但下降幅度較小,說明本文方法成功跟蹤率受天氣影響較小。實驗證明:在不同天氣時,本文方法跟蹤風險變化態勢的成功率均較高,受天氣影響較小。

圖8 距離精度測試結果

圖9 成功跟蹤率測試結果
4 結語
冷鏈物流發展較快,但其采集因素的多樣性較差、跟蹤技術較低屬于該行業發展的一大難點,導致物流的風險顯著提升。為此研究基于云平臺的冷鏈物流風險變化態勢跟蹤方法,精準跟蹤物理軌跡,實時了解風險變化態勢,盡快找到發生風險的原因,降低物流風險發生概率,為冷鏈物流行業提供更為安全的物流環境。
猜你喜歡
物流技術與應用(2020年11期)2020-03-11 03:11:36
兒童故事畫報(2019年5期)2019-05-26 14:26:14
汽車觀察(2018年12期)2018-12-26 01:05:44
消費導刊(2018年8期)2018-05-25 13:20:16
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
現代企業(2015年2期)2015-02-28 18:45:09
商界(2014年12期)2014-04-29 00:44:03